2018年 第4卷 第4期
《工程(英文)》 >> 2018年 第4卷 第4期 doi: 10.1016/j.eng.2018.07.013
速度约束条件下基于步进电机驱动的Hilare 机器人航点导航的控制
Department of Mechanical Engineering, Indian Institute of Technology Madras, Chennai 600036, India
下一篇 上一篇
摘要
在障碍物密集的环境中,找到一条从初始位置到目标位置的最优轨迹,并控制一台Hilare 机器人沿着该轨迹行驶仍是一项具有挑战性的任务。为了完成这个任务,控制环中通常需要加入路径规划器以及轨迹跟踪控制器。本文的目的是在一台由步进电机驱动的Hilare 机器人上实现轨迹跟踪控制的任务。其中,轨迹由航点集合表示。在设计过程中,控制器需要考虑处理方向连续的离散航点,并且需要考虑不同的执行器速度约束。本文利用多目标粒子群优化(multi-objective particle swarm optimization, MOPSO)的方法来调整控制器的参数。MOPSO 通过最小化移动机器人在追踪预定义轨迹时的平均航迹误差以及平均线速度误差来得到最优的控制器参数。实验中,移动机器人被控制从起始点沿着一条由航点表示的轨迹行驶到达目标点。实验同样给出对路径规划器生成的轨迹,以及自定义轨迹的跟踪结果。基于移动机器人的实验结果验证了本文方法对不同形式轨迹跟踪的有效性。
补充材料
图片

图1

图2
图3

图4

图5
图6

图7

图8
图9
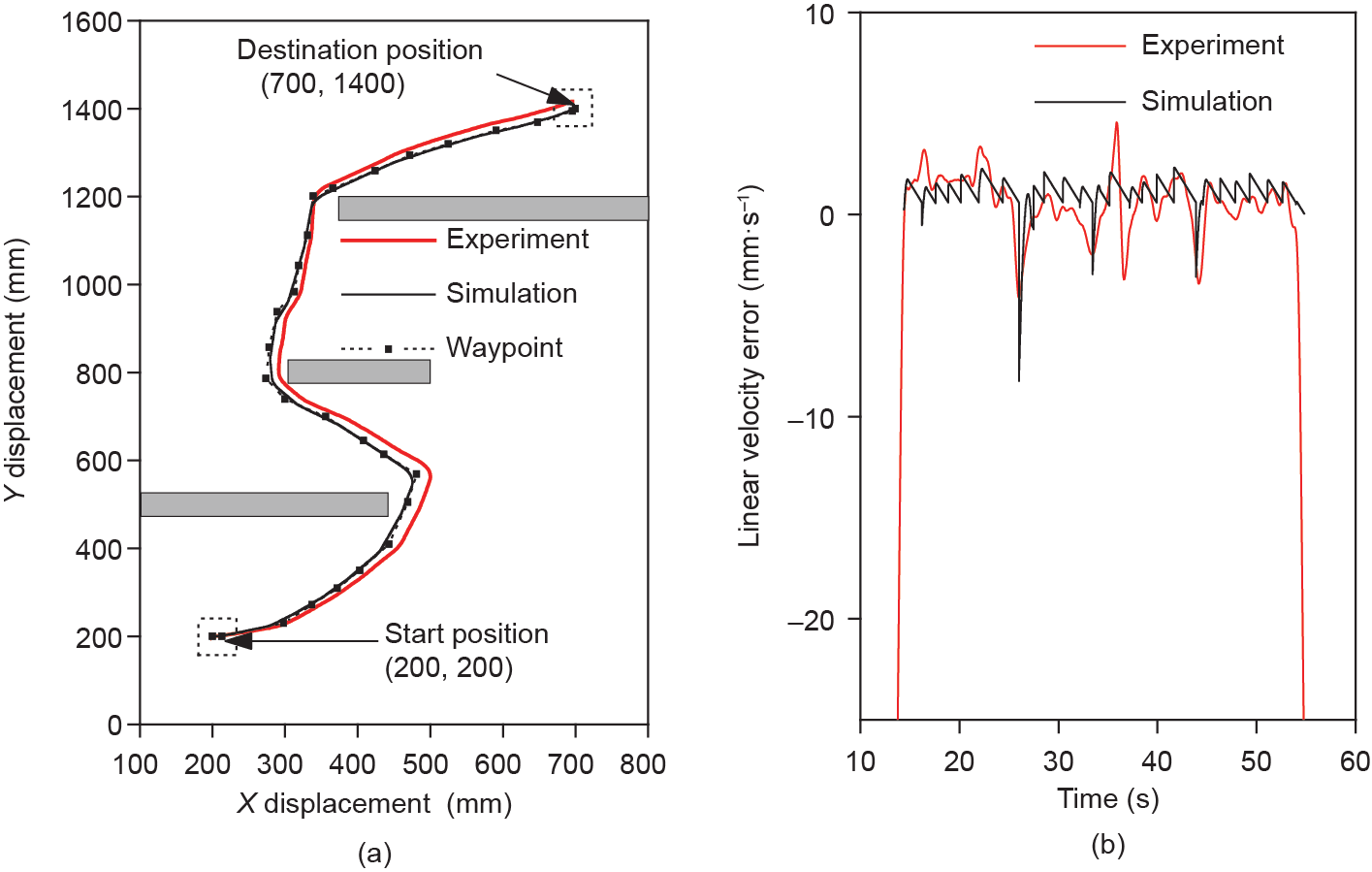
图10

图11

图12
参考文献
[ 1 ] Dudek G, Jenkin M. Computational principles of mobile robotics. 2nd ed. New York: Cambridge University Press; 2010. 链接1
[ 2 ] Konduri S, Torres EOC, Prabhakar R. Dynamics and control of a differential drive robot with wheel slip: application to coordination of multiple robots. J Dyn Syst Meas Control 2017;139(1):014505. 链接1
[ 3 ] Fahimi F. Autonomous robots: modeling, path planning, and control. New York: Springer; 2008.
[ 4 ] da Silva J, de Sousa J. A dynamic programming based path-following controller for autonomous vehicles. Contr Intell Syst 2011;39(4):245–53. 链接1
[ 5 ] Kolmanovsky I, McClamroch NH. Developments in nonholonomic control problems. IEEE Control Syst 1995;15(6):20–36. 链接1
[ 6 ] Nagy Á, Csorvási G, Kiss D. Path planning and control of differential and car- like robots in narrow environments. In: Proceedings of the 13th International Symposium on Applied Machine Intelligence and Informatics; 2015 Jan 22–24; Herl’any, Slovakia; 2015. p. 103–8. 链接1
[ 7 ] Mathew R, Hiremath SS. Trajectory tracking and control of differential drive robot for predefined regular geometrical path. Procedia Technol 2016;25:1273–80. 链接1
[ 8 ] Snider JM. Automatic steering methods for autonomous automobile path tracking. Pittsburgh: Carnegie Mellon University; 2009. 链接1
[ 9 ] Park B, Yoo SJ, Park JB, Choi YH. A simple adaptive control approach for trajectory tracking of electrically driven nonholonomic mobile robots. IEEE Trans Contr Syst Technol 2010;18(5):1199–206. 链接1
[10] Valbuena L, Tanner HG. Hybrid potential field based control of differential drive mobile robots. J Intell Robot Syst Theory Appl 2012;68(3–4):307–22. 链接1
[11] Chen X, Jia Y, Matsuno F. Tracking control for differential-drive mobile robots with diamond-shaped input constraints. IEEE Trans Contr Syst Technol 2014;22(5):1999–2006. 链接1
[12] Kanayama Y, Kimura Y, Miyazaki F, Noguchi T. A stable tracking control method for an autonomous mobile robot. In: Proceedings of IEEE International Conference on Robotics and Automation; 1990 May 13–18; Cincinnati, OH, USA. New York: IEEE; 1990. p. 384–9. 链接1
[13] Fukao T, Nakagawa H, Adachi N. Adaptive tracking control of a nonholonomic mobile robot. IEEE Trans Automat Contr 2000;16(5):609–15. 链接1
[14] Maalouf E, Saad M, Saliah H. A higher level path tracking controller for a four-wheel differentially steered mobile robot. Robot Auton Syst 2006;54 (1):23–33. 链接1
[15] Guo J, Lin Z, Cao M, Yan G. Adaptive control schemes for mobile robot formations with triangularised structures. IET Control Theory Appl 2010;4 (9):1817–27. 链接1
[16] Miao Y, Khamis AM, Karray F, Kame MS. A novel approach to path planning for autonomous mobile robots. Contr Intell Syst 2011;39(4):235–44.
[17] Laumond JP, Jacobs PE, Taix M, Murray RM. A motion planner for nonholonomic mobile robots. IEEE Trans Robot Autom 1994;10 (5):577–93. 链接1
[18] LaValle S, Tennoe M, Henssonow S, editors. Rapidly-exploring random trees: a new tool for path planning. Whitefish: Betascript Publishing; 1998. 链接1
[19] Kavraki L, Svestka P, Latombe JC, Overmars MH. Probabilistic roadmaps for path planning in high-dimensional configuration spaces. IEEE Trans Robot Autom 1996;12(4):566–80. 链接1
[20] Coello Coello CA, Leehuga MS. MOPSO: a proposal for multiple objective particle swarm optimization. In: Proceedings of the 2002 Congress on Evolutionary Computation; 2002 May 12–17; Honolulu, HI, USA; 2002. p. 1051–6.











 京公网安备 11010502051620号
京公网安备 11010502051620号




