2018年 第4卷 第4期
《工程(英文)》 >> 2018年 第4卷 第4期 doi: 10.1016/j.eng.2018.07.015
基于驾驶脑的智能驾驶车辆硬件平台架构
a Department of Computer Science and Technology, Tsinghua University, Beijing 100084, China
b State Key Laboratory of Automotive Safety and Energy, Tsinghua University, Beijing 100084, China
c Center for Intelligent Connected Vehicles and Transportation, Tsinghua University, Beijing 100084, China
下一篇 上一篇
摘要
不同智能驾驶试验平台的传感器型号、数量、安装位置各不相同,导致传感器信息处理模块也各不相同;不同驾驶地图,其提供信息的粒度也没有固定标准,由此构成的智能驾驶系统软件模块的数量、接口各不相同。基于以驾驶脑为核心的智能驾驶车辆软件与硬件架构,决策模块将不直接与传感器信息处理模块发生关联,通过驾驶认知的形式化语言,将驾驶认知形式化,由驾驶脑认知形成决策。驾驶认知的形式化降低了传感器数量、类型、安装位置的变化对整个软件架构的影响,使得软件架构可以在不同传感器配置车辆平台上方便地移植。
图片

图1

图2
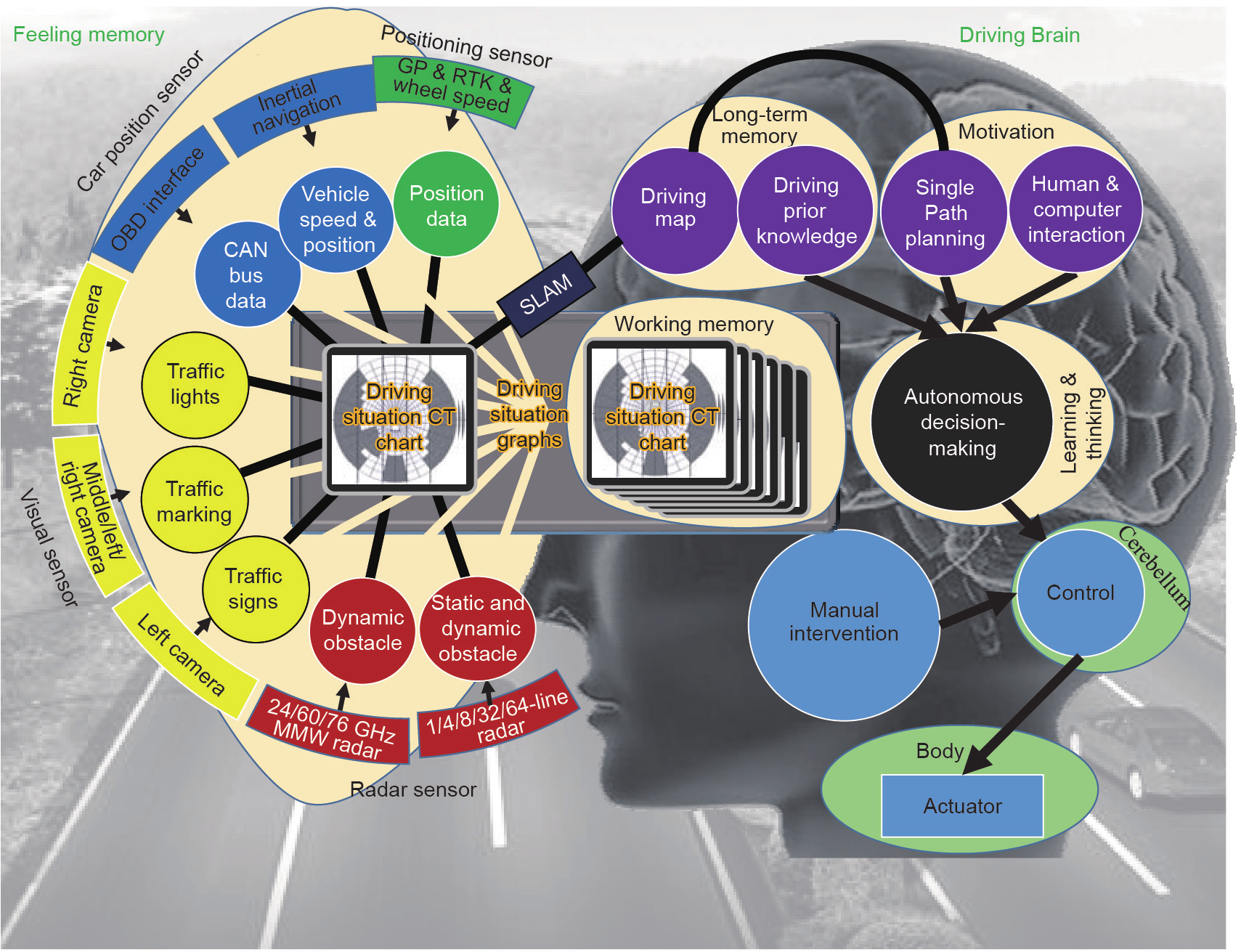
图3
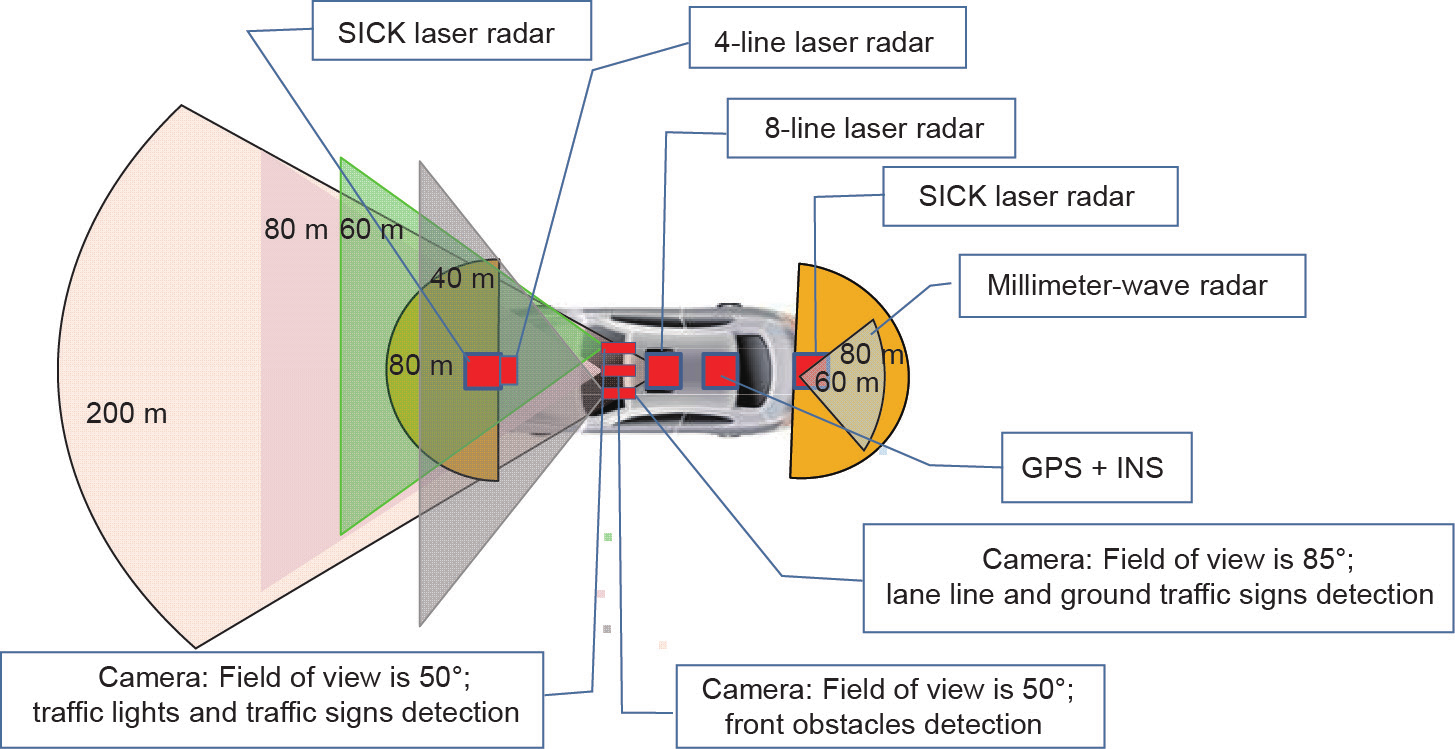
图4
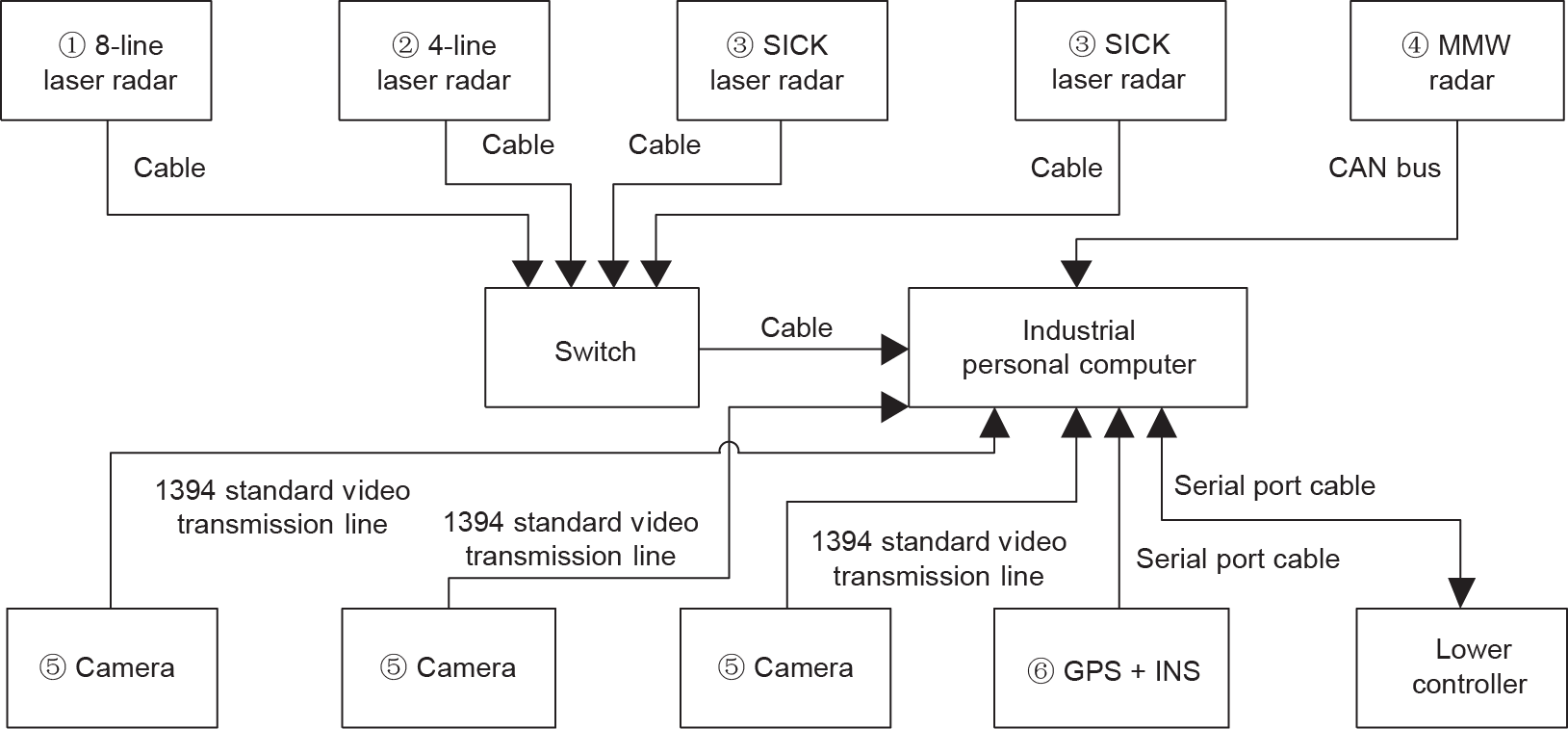
图5

图6

图7
参考文献
[ 1 ] Gage DW. UGV History 101: a brief history of unmanned ground vehicle (UGV) development efforts. Unmanned Syst Mag 1970;13(3):9–32. 链接1
[ 2 ] Luo X, Deng J, Wang WP, Wang JH, Zhao WB. A quantized kernel learning algorithm using a minimum kernel risk-sensitive loss criterion and bilateral gradient technique. Entropy 2017;19(7):365. 链接1
[ 3 ] Kanade T, Thorpe C. CMU strategic computing vision project report: 1984 to 1985. Pittsburgh: Carnegie-Mellon University; 1986. 链接1
[ 4 ] Williams M. PROMETHEUS-the European research programme for optimising the road transport system in Europe. In: Proceedings of IEE Colloquium International Conference on Driver Information; 1988 Dec 1; London, UK; 1998. p. 1–9. 链接1
[ 5 ] Wang SL, Zhao YP, Shu Y, Yuan HN, Geng J, Wang SP. Fast search local extremum for maximal information coefficient (MIC). J Comput Appl Math 2018;327:372–87. 链接1
[ 6 ] Tsugawa S, Aoki M, Hosaka A, Seki K. A survey of present IVHS activities in Japan. Control Eng Pract 1997;5(11):1591–7. 链接1
[ 7 ] Luo X, Zhang DD, Yang LT, Liu J, Chang XH, Ning HS. A kernel machine-based secure data sensing and fusion scheme in wireless sensor networks for the cyber-physical systems. Future Gener Comput Syst 2016;61:85–96. 链接1
[ 8 ] Gao HB, Cheng B, Wang JQ, Li KQ, Zhao JH, Li DY. Object classification using CNN-based fusion of vision and LIDAR in autonomous vehicle environment. IEEE Trans Ind Inform 2018;99:1. 链接1
[ 9 ] Gao HB, Zhang XY, Zhang TL, Liu YC, Li DY. Research of intelligent vehicle variable granularity evaluation based on cloud model. Acta Electron Sin 2016;44(2):365–73.
[10] Bertozzi M, Broggi A, Fascioli A. VisLab and the evolution of vision-based UGVs. Comput 2006;39(12):31–8. 链接1
[11] Kolski S, Ferguson D, Bellino M, Siegwart R. Autonomous driving in structured and unstructured environments. In: Proceedings of 2006 IEEE Intelligent Vehicles Symposium; 2006 Jun 13–15; Tokyo, Japan; 2006. p. 558–63. 链接1
[12] Yuan HN, Wang SL, Geng J, Yu Y, Zhong M. Robust clustering with distance and density. Int J Data Wareh Min 2017;13(2):63–74. 链接1
[13] Guizzo E. How Google’s self-driving car works [Internet]. New York: IEEE Spectrum; c2018 [updated 2011 Oct 18; cited 2017 Jul 30]. 链接1
[14] Luo X, Luo H, Chang XH. Online optimization of collaborative web service QoS prediction based on approximate dynamic programming. Int J Distrib Sens Netw 2015;11(8):4524921. 链接1
[15] Bayerl SFX, Luettel T, Wuensche HJ. Following dirt roads at night-time: sensors and features for lane recognition and tracking. In: Proceedings of the 7th Workshop on Planning, Perception and Navigation for Intelligent Vehicles; 2015 Sep 28; Hamburg, Germany; 2015. 链接1
[16] Luo X, Deng J, Liu J, Wang W, Ban X, Wang JH. A quantized kernel least mean square scheme with entropy-guided learning for intelligent data analysis. China Commun 2017;14(7):127–36. 链接1
[17] Dissanayake MWMG, Newman P, Clark S, Durrant-Whyte HF, Csorba M. A solution to the simultaneous localization and map building problem. IEEE Trans Robot Autom 2001;17(3):229–41. 链接1
[18] Zou R, Wang M, Wang SL, Li S, Zhang C, Deng L, et al. Adaptive laser shock micro-forming for MEMS device applications. Opt Express 2017;25 (4):3875–83. 链接1
[19] Zhang XY, Gao HB, Guo M, Li GP, Liu YC, Li DY. A study on key technologies of unmanned driving. CAAI Trans Intell Technol 2016;1(1):4–13. 链接1
[20] Luo X, Liu J, Zhang DD, Chang X. A large-scale web QoS prediction scheme for the industrial internet of things based on a kernel machine learning algorithm. Comput Netw 2016;101:81–9. 链接1
[21] Su MH. BYD SuRei 2013 china intelligent vehicle future challenge. Consum Guide 2013;2013(11):76. Chinese.
[22] Yu ZX, Xue YF, Zhu Y, Sun XS. Army Military Transportation University intelligent vehicle team won the first two places in the Sixth China Intelligent Vehicle Future Challenge. Auto Appl 2015;1:F0002. Chinese.
[23] Tang CJ. Unmanned bus made in Henan is under road test in an endless stream on Zhengkai expressway. Henan Business Daily 2015 Aug 31;Sect. A09. Chinese.
[24] Ma M, Wang L, Zhang K. Whether 3D printing can change the manufacturing industry or not—interview with Academician Bingheng Lu of Chinese Academy of Engineering. High Technol Ind 2013;9(4):38–43. Chinese. 链接1











 京公网安备 11010502051620号
京公网安备 11010502051620号




