2022年 第15卷 第8期
《工程(英文)》 >> 2022年 第15卷 第8期 doi: 10.1016/j.eng.2020.09.017
一种飞机装配用便携式非接触轮廓扫描系统
School of mechanical engineering, Dalian University of Technology, Dalian 116024, China
下一篇 上一篇
摘要
在大型飞机装配过程中,三维轮廓扫描对于装配质量检测具有关键作用。为实现大型飞机零部件高反光曲面轮廓的扫描测量,本文提出一种兼顾精度与效率的非接触式自动化测量系统和方法。首先,以距离传感器辅助摄影测量,建立一种非接触式三维坐标复合测量系统,避免被测表面高反光对摄影测量精度的影响。同时,建立一种蕴含距离传感器一维测距信息与视觉全局转换关系的复合式坐标测量模型,高精度解算被测量点的三维坐标。其次,构建一种轮廓信息驱动的形面自动扫描方法和策略,在距离传感器有效量程内实现形面的非接触快速扫描与轮廓重建。最后,在某型号飞机平尾升降舵(尺寸约1760 mm × 460 mm)装配过程中对所提系统及方法进行现场试验与精度分析。实验表明:整个测量过程用时仅208 s,形面轮廓重建精度优于0.121 mm,因此,鉴于大型飞机装配过程中形面轮廓的高精度和高效率测量要求,所提系统及方法具有广阔应用前景。
图片

图 1
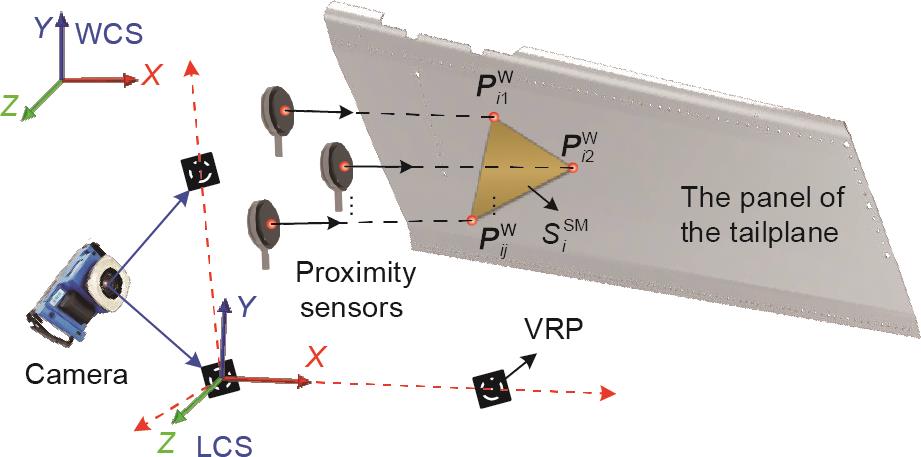
图 2
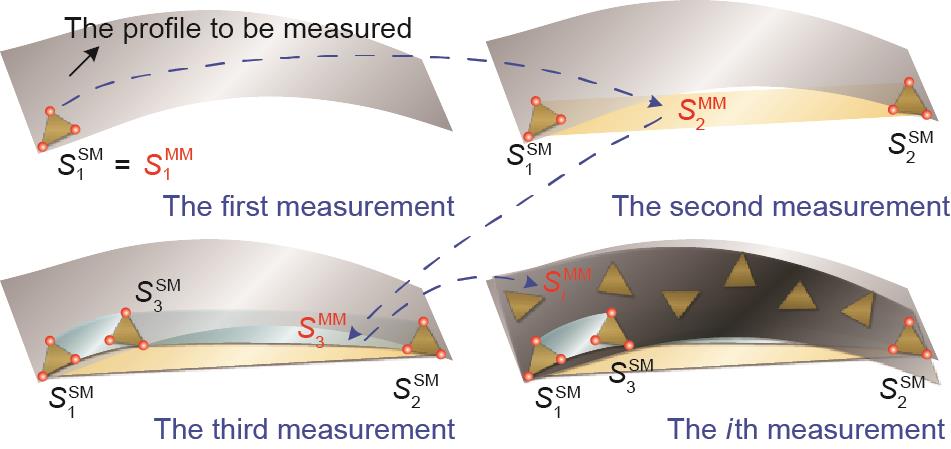
图 3

图 4
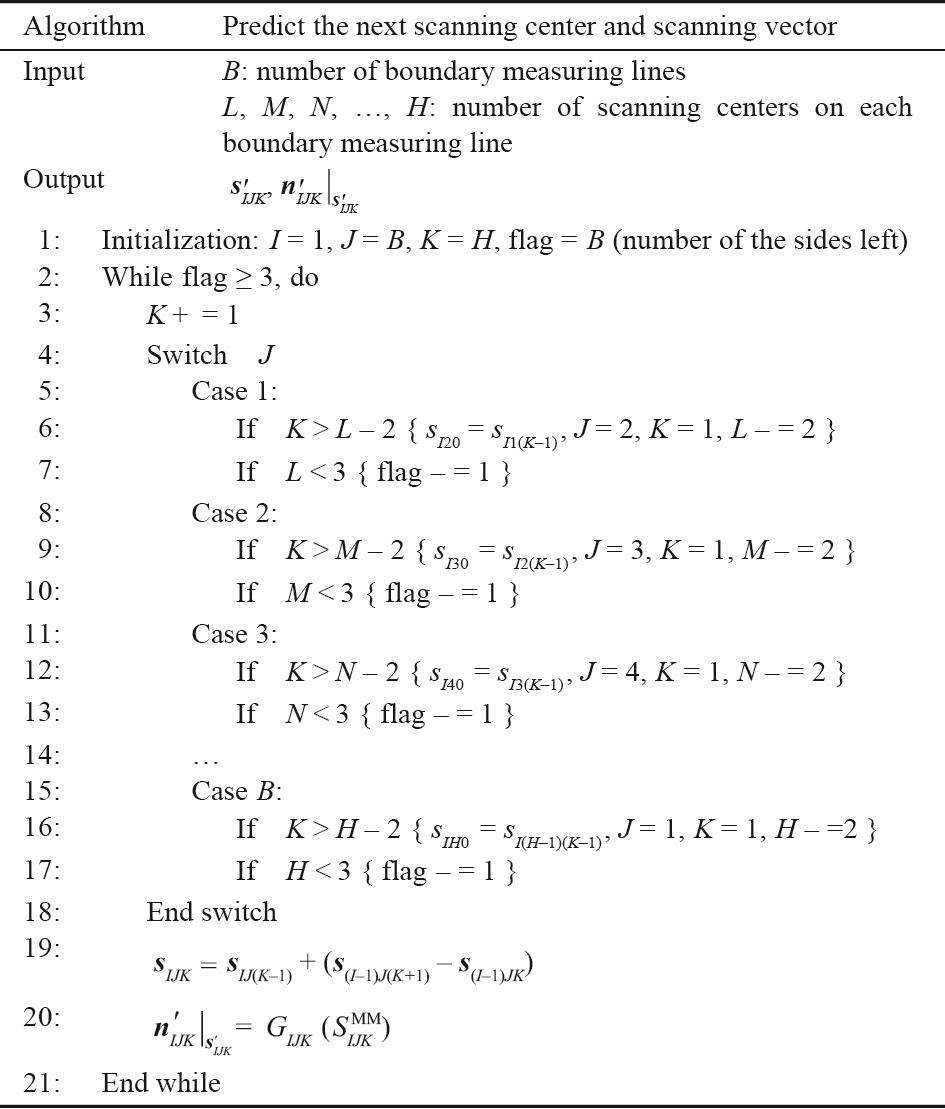
图 5
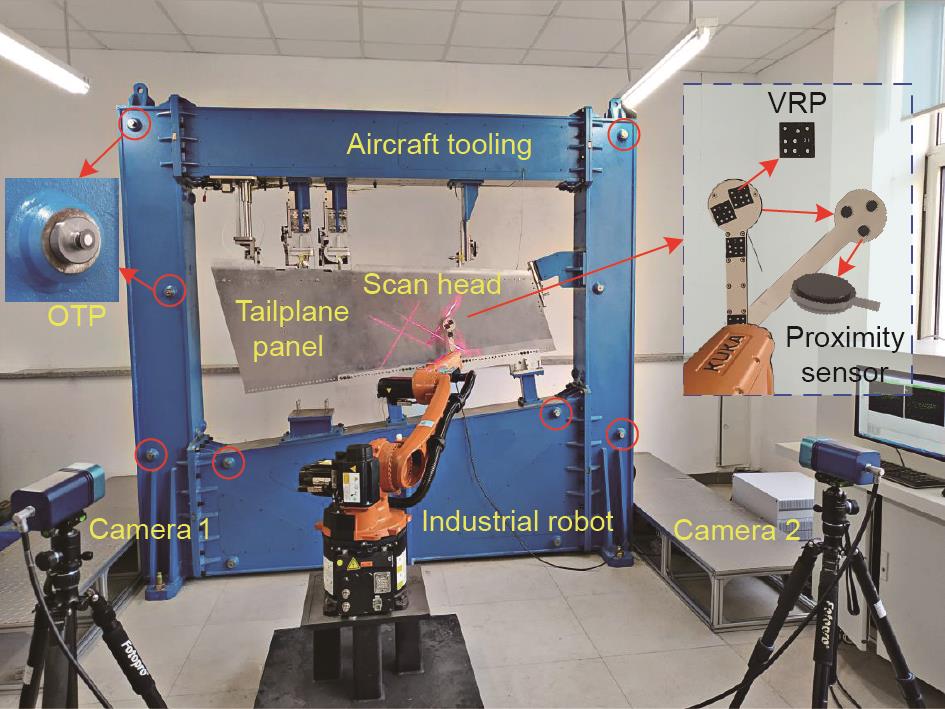
图 6
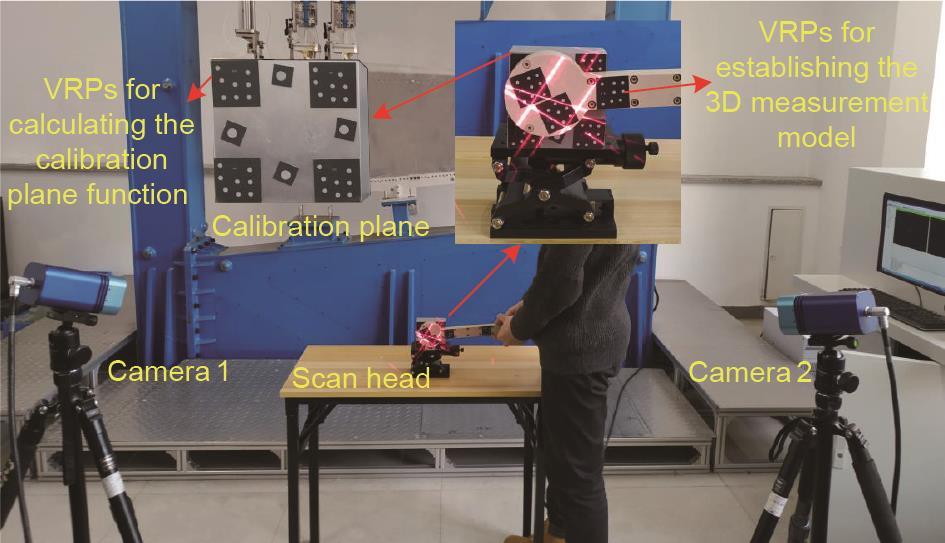
图 7
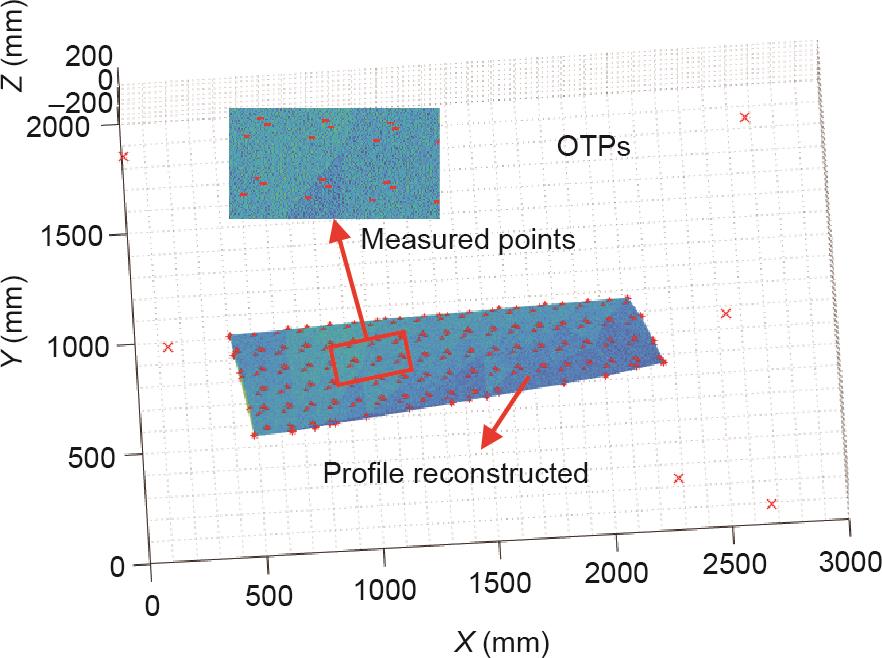
图 8
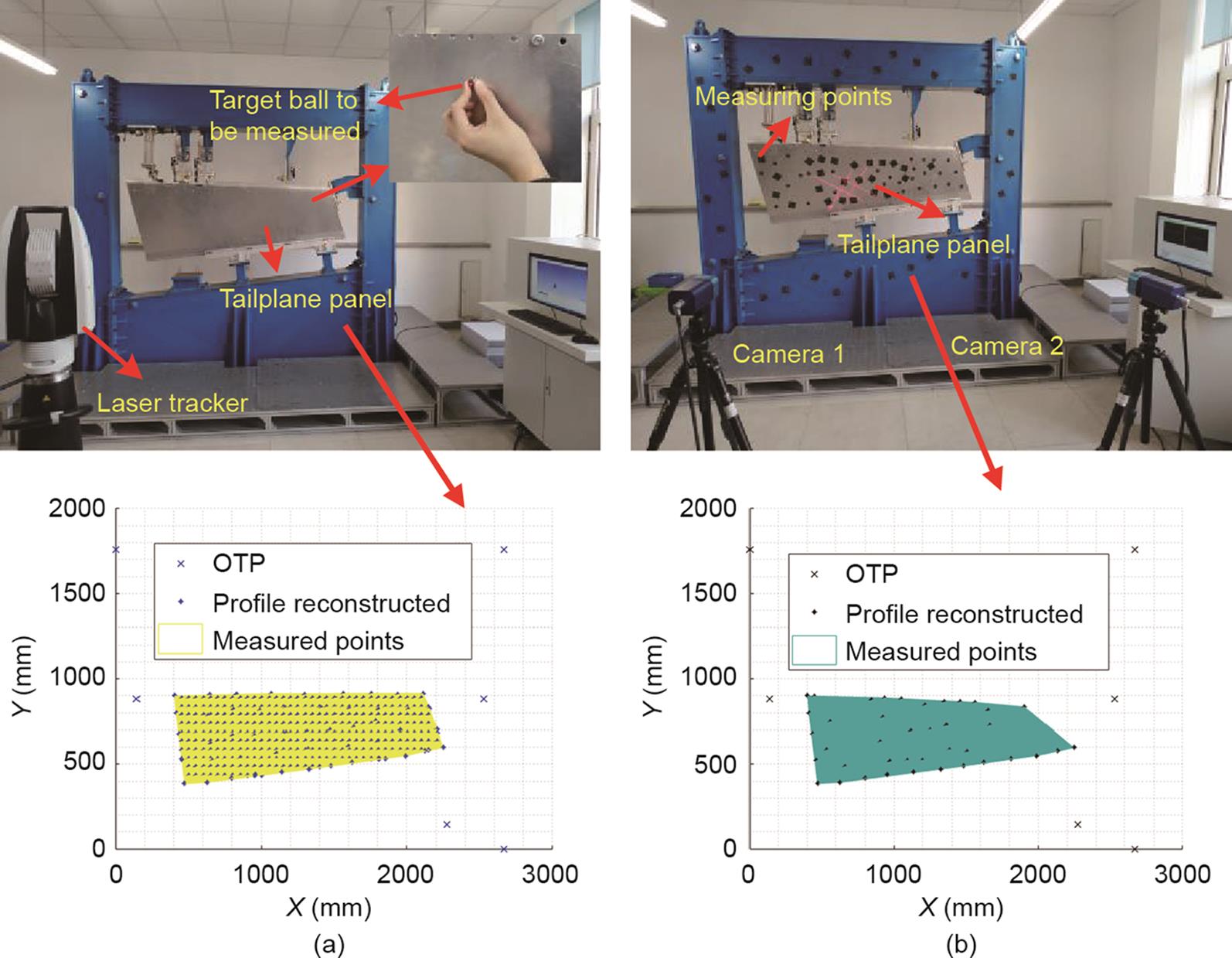
图 9

图10
参考文献
[ 1 ] Peng G, Sun Y, Xu S. Development of an integrated laser sensors based measurement system for large-scale components automated assembly application. IEEE Access 2018;6:45646‒54. 链接1
[ 2 ] McKenna V, Jin Y, Murphy A, Morgan M, Fu R, Qin X, et al. Cost-oriented process optimisation through variation propagation management for aircraft wing spar assembly. Robot Comput Integr Manuf 2019;57:435‒51. 链接1
[ 3 ] Shah A, Blumberg L, Shah J. Planning for manipulation of interlinked deformable linear objects with applications to aircraft assembly. IEEE Trans Autom Sci Eng 2018;15(4):1823‒38. 链接1
[ 4 ] Bao Y, Chen Z, Wei S, Xu Y, Tang Z, Li H. The state of the art of data science and engineering in structural health monitoring. Engineering 2019;5(2):234‒42. 链接1
[ 5 ] Zhong RY, Xu X, Klotz E, Newman ST. Intelligent manufacturing in the context of Industry 4.0: a review. Engineering 2017;3(5):616‒30. 链接1
[ 6 ] Schmitt RH, Peterek M, Morse E, Knapp W, Galetto M, Härtig F, et al. Advances in large-scale metrology—review and future trends. CIRP Ann 2016;65(2):643‒65. 链接1
[ 7 ] Pérez Muñoz P, García JAA, Mazo JS. Analysis of the initial thermal stabilization and air turbulences effects on laser tracker measurements. J Manuf Syst 2016;41:277‒86. 链接1
[ 8 ] Lei P, Zheng L. An automated in-situ alignment approach for finish machining assembly interfaces of large-scale components. Robot Comput Integr Manuf 2017;46:130‒43. 链接1
[ 9 ] Spencer Jr BF, Hoskere V, Narazaki Y. Advances in computer vision-based civil infrastructure inspection and monitoring. Engineering 2019;5(2):199‒222. 链接1
[10] Lee T, Kim C, Cho DD. A monocular vision sensor-based efficient SLAM method for indoor service robots. IEEE Trans Ind Electron 2019;66(1):318‒28. 链接1
[11] Xu Y, Gao F, Jiang X. Performance analysis and evaluation of geometric parameters in stereo deflectometry. Engineering 2018;4(6):806‒15. 链接1
[12] Cervera A, Ezra O, Kuperman A, Peretz MM. Modeling and control of magnetic actuation systems based on sensorless displacement information. IEEE Trans Ind Electron 2019;66(6):4849‒59. 链接1
[13] Beyca OF, Rao PK, Kong Z, Bukkapatnam STS, Komanduri R. Heterogeneous sensor data fusion approach for real-time monitoring in ultraprecision machining (UPM) process using non-parametric Bayesian clustering and evidence theory. IEEE Trans Autom Sci Eng 2016;13(2):1033‒44. 链接1
[14] Lee KM, Hao B, Li M, Bai K. Multiparameter eddy-current sensor design for conductivity estimation and simultaneous distance and thickness measurements. IEEE Trans Ind Inform 2019;15(3):1647‒57. 链接1
[15] Lembono TS, Suárez-Ruiz F, Pham QC. SCALAR: simultaneous calibration of 2D laser and robot kinematic parameters using planarity and distance constraints. IEEE Trans Autom Sci Eng 2019;16(4):1971‒9. 链接1
[16] Kim YK, Kim KS, Kim S. A portable and remote 6-DOF pose sensor system with a long measurement range based on 1D laser sensors. IEEE Trans Ind Electron 2015;62(9):5722‒9. 链接1
[17] Wu L, Ren H. Finding the kinematic base frame of a robot by hand‒eye calibration using 3D position data. IEEE Trans Autom Sci Eng 2017;14(1):314‒24. 链接1
[18] An Y, Li B, Hu H, Zhou X. Building an omnidirectional 3D color laser ranging system through a novel calibration method. IEEE Trans Ind Electron 2019;66(11):8821‒31. 链接1
[19] Kim YK, Kim Y, Jung YS, Jang IG, Kim KS, Kim S, et al. Developing accurate long-distance 6-DOF motion detection with one-dimensional laser sensors: three-beam detection system. IEEE Trans Ind Electron 2013;60(8):3386‒95.
[20] Zhang Y, Tang K. Automatic sweep scan path planning for five-axis free-form surface inspection based on hybrid swept area potential field. IEEE Trans Autom Sci Eng 2019;16(1):261‒77. 链接1
[21] Huang Q, Lan J, Li X. Robotic arm based automatic ultrasound scanning for three-dimensional imaging. IEEE Trans Ind Inform 2019;15(2):1173‒82. 链接1
[22] Macleod CN, Dobie G, Pierce SG, Summan R, Morozov M. Machining-based coverage path planning for automated structural inspection. IEEE Trans Autom Sci Eng 2018;15(1):202‒13. 链接1
[23] Palomer A, Ridao P, Forest J, Ribas D. Underwater laser scanner: ray-based model and calibration. IEEE/ASME Trans Mechatron 2019;24(5):1986‒97. 链接1











 京公网安备 11010502051620号
京公网安备 11010502051620号




