
2015年 第1卷 第1期
《工程(英文)》 >> 2015年 第1卷 第1期 doi: 10.15302/J-ENG-2015005
磁控螺旋形微纳米机器人在生物医学方面的应用
Institute of Robotics and Intelligent Systems (IRIS), ETH Zurich, Zurich CH-8092, Switzerland
下一篇 上一篇
摘要
磁控螺旋形微纳米机器人可在低强度旋转磁场(<10 mT)的驱动下,实现亚微米精度的三维(3D)游动。由于低强度磁场对细胞和组织无害,磁控螺旋形微纳米机器人在生物医学方面有很大的应用前景,如微创手术、细胞操作和分析以及靶向治疗。本文系统介绍了磁控螺旋形微纳米机器人的制造方法、运动控制和生物医学应用。
关键词
磁控螺旋形微纳米机器人 ; 可游动微纳米机器人 ; 人造细菌鞭毛(ABFs) ; 功能化 ; 生物医学应用
图片
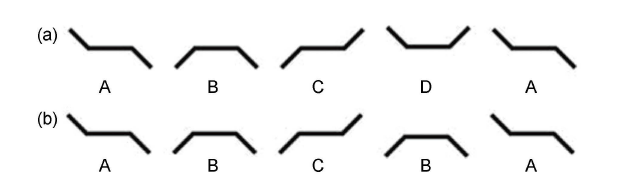
图1
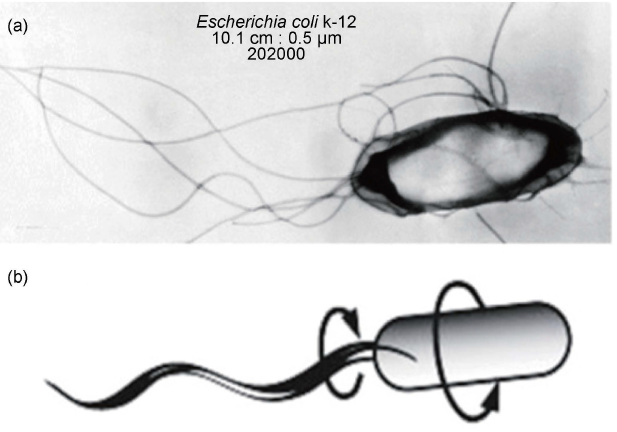
图2

图3
图4
图5
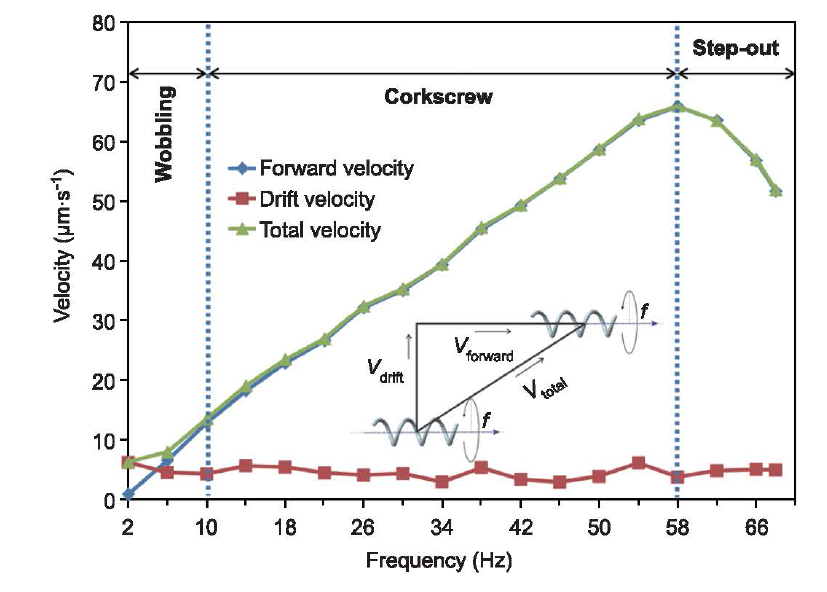
图6
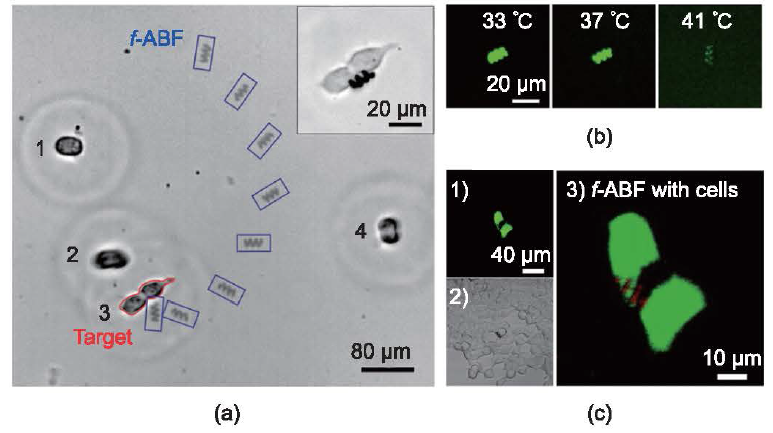
图7
参考文献
[ 1 ] B. J. Nelson, I. K. Kaliakatsos, J. J. Abbott. Microrobots for minimally invasive medicine. Annu. Rev. Biomed. Eng., 2010, 12(1): 55–85 链接1
[ 2 ] W. Gao, J. Wang. The environmental impact of micro/nanomachines: A review. ACS Nano, 2014, 8(4): 3170–3180 链接1
[ 3 ] L. Zhang, K. E. Peyer, B. J. Nelson. Artificial bacterial flagella for micromanipulation. Lab Chip, 2010, 10(17): 2203–2215 链接1
[ 4 ] J. J. Abbott, How should microrobots swim? Int. J. Robot. Res., 2009, 28(11−12): 1434–1447
[ 5 ] E. M. Purcell. Life at low Reynolds number. Am. J. Phys., 1977, 45(1): 3–11
[ 6 ] H. C. Berg, R. A. Anderson. Bacteria swim by rotating their flagellar filaments. Nature, 1973, 245(5425): 380–382 链接1
[ 7 ] T. Baba, Construction of Escherichia coli K-12 in-frame, single-gene knockout mutants: The Keio collection. Mol. Syst. Biol. 2006, 2(1): 2006.0008
[ 8 ] W. R. DiLuzio, Escherichia coli swim on the right-hand side. Nature, 2005, 435(7046): 1271–1274 链接1
[ 9 ] K. E. Peyer, S. Tottori, F. Qiu, L. Zhang, B. J. Nelson. Magnetic helical micromachines. Chemi. Eur. J., 2013, 19(1): 28–38
[10] K. E. Peyer, L. Zhang, B. J. Nelson. Bio-inspired magnetic swimming microrobots for biomedical applications. Nanoscale, 2013, 5(4): 1259–1272 链接1
[11] T. Honda, K. I. Arai, K. Ishiyama. Micro swimming mechanisms propelled by external magnetic fields. IEEE Trans. Magn., 1996, 32(5): 5085–5087 链接1
[12] K. Kikuchi, A. Yamazaki, M. Sendoh, K. Ishiyama, K. I. Arai. Fabrication of a spiral type magnetic micromachine for trailing a wire. IEEE Trans. Magn., 2005, 41(10): 4012–4014 链接1
[13] D. J. Bell, S. Leutenegger, K. M. Hammar, L. X. Dong, B. J. Nelson. Flagella-like propulsion for microrobots using a nanocoil and a rotating electromagnetic field. In: Proceedings of IEEE International Conference on Robotics and Automation, 2007: 1128–1133
[14] A. Ghosh, P. Fischer. Controlled propulsion of artificial magnetic nanostructured propellers. Nano Lett., 2009, 9(6): 2243–2245 链接1
[15] S. Tottori, L. Zhang, F. Qiu, K. K. Krawczyk, A. Franco-Obregón, B. J. Nelson. Magnetic helical micromachines: Fabrication, controlled swimming, and cargo transport. Adv. Mater., 2012, 24(6): 811–816 链接1
[16] W. Gao, Bioinspired helical microswimmers based on vascular plants. Nano Lett., 2014, 14(1): 305–310 链接1
[17] P. L. Venugopalan, R. Sai, Y. Chandorkar, B. Basu, S. Shivashankar, A. Ghosh. Conformal cytocompatible ferrite coatings facilitate the realization of a nanovoyager in human blood. Nano Lett., 2014, 14(4): 1968–1975 链接1
[18] L. Zhang, Characterizing the swimming properties of artificial bacterial flagella. Nano Lett., 2009, 9(10): 3663–3667 链接1
[19] B. J. Nelson, K. E. Peyer. Micro- and nanorobots swimming in heterogeneous liquids. ACS Nano, 2014, 8(9): 8718–8724 链接1
[20] F. Qiu, Noncytotoxic artificial bacterial flagella fabricated from biocompatible ORMOCOMP and iron coating. J. Mater. Chem. B, 2014, 2(4): 357–362
[21] J. Li, Template electrosynthesis of tailored-made helical nanoswimmers. Nanoscale, 2014, 6(16): 9415–9420 链接1
[22] D. Schamel, Nanopropellers and their actuation in complex viscoelastic media. ACS Nano, 2014, 8(9): 8794–8801 链接1
[23] S. Schuerle, S. Pané, E. Pellicer, J. Sort, M. D. Baró, B. J. Nelson. Helical and tubular lipid microstructures that are electroless-coated with CoNiReP for wireless magnetic manipulation. Small, 2012, 8(10): 1498–1502 链接1
[24] S. Kawata, H. B. Sun, T. Tanaka, K. Takada. Finer features for functional microdevices—Micromachines can be created with higher resolution using two-photon absorption. Nature, 2001, 412(6848): 697–698 链接1
[25] M. Suter, Superparamagnetic microrobots: Fabrication by two-photon polymerization and biocompatibility. Biomed. Microdevices, 2013, 15(6): 997–1003 链接1
[26] M. A. Zeeshan, Hybrid helical magnetic microrobots obtained by 3D template-assisted electrodeposition. Small, 2014, 10(7): 1284–1288 链接1
[27] T. Y. Huang, Cooperative manipulation and transport of microobjects using multiple helical microcarriers. RSC Adv., 2014, 4(51): 26771–26776 链接1
[28] F. Qiu, R. Mhanna, L. Zhang, Y. Ding, S. Fujita, B. J. Nelson. Artificial bacterial flagella functionalized with temperature-sensitive liposomes for controlled release. Sens. Actuators B Chem., 2014, 196: 676–681 链接1
[29] R. Mhanna, Artificial bacterial flagella for remote-controlled targeted single-cell drug delivery. Small, 2014, 10(10): 1953–1957 链接1
[30] F. Qiu, S. Fujita, R. Mhanna, L. Zhang, B. R. Simona, B. J. Nelson. Magnetic helical microswimmers functionalized with lipoplexes for targeted gene delivery. Adv. Funct. Mater., 2015, 25(11): 1666–1671 链接1
[31] A. Servant, F. Qiu, M. Mazza, K. Kostarelos, B. J. Nelson. Controlled in vivo swimming of a swarm of bacteria-like microrobotic flagella. Adv. Mater., 2015, 27(19): 2981–2988 链接1











 京公网安备 11010502051620号
京公网安备 11010502051620号




