
2015年 第1卷 第1期
《工程(英文)》 >> 2015年 第1卷 第1期 doi: 10.15302/J-ENG-2015016
振动驱动的微型机器人非完整约束补偿的定位方法
Department of Mechanical Engineering, National Technical University of Athens, 15780 Zografou, Athens, Greece
a Present address: Department of Computer Science and Engineering, University of Ioannina, 45110 Ioannina, Greece
下一篇 上一篇
摘要
本文提出了一种微型移动机器人非完整约束补偿的定位方法,推导了相关公式并进行了实际操作。该移动机器人由两台振动型直流微型电机驱动。本文所描述的开环法和闭环法增加了微型机器人平台侧向净位移的能力,这是通过执行若干重复步骤来实现的,这些步骤与期望位置、速度和时间相关。仿真和试验结果验证了所述方法的有效性。
图片

图1

图2
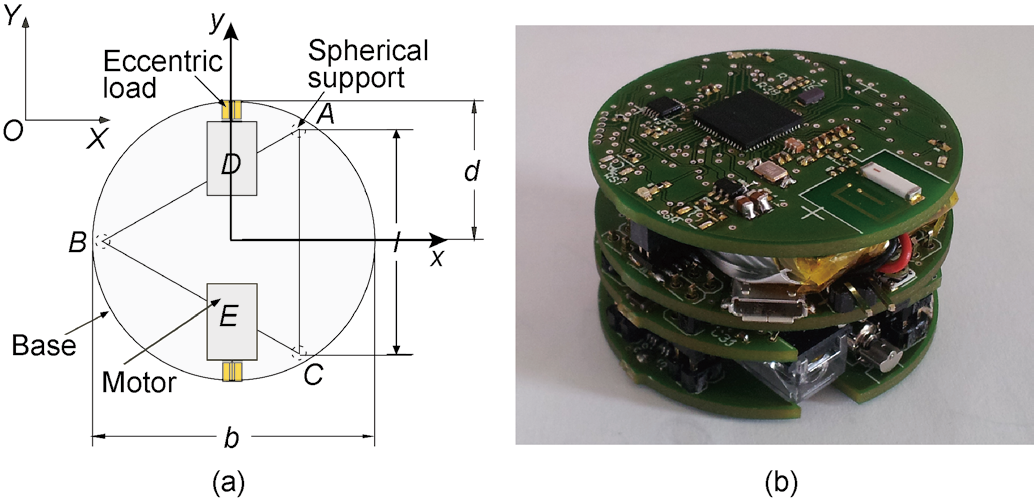
图3

图4

图5

图6

图7

图8

图9

图10

图11

图12
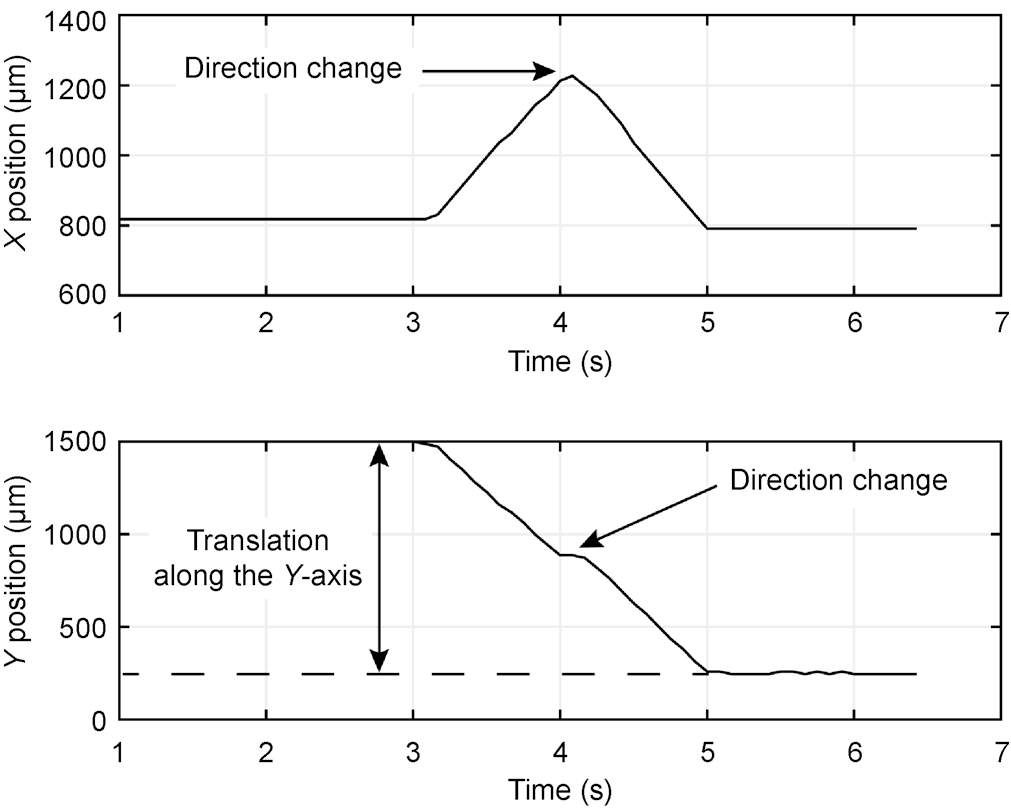
图13

图14

图15
参考文献
[ 1 ] A. Kortschack, A. Shirinov, T. Trüper, S. Fatikow. Development of mobile versatile nanohandling microrobots: Design, driving principles, haptic control. Robotica, 2005, 23(4): 419–434 链接1
[ 2 ] J. M. Breguet, R. Clavel. Stick and slip actuators: Design, control, performances and applications. In: Proceedings of the 1998 Int. Symposium on Micro-mechatronics and Human Science(MHS). Nagoya: IEEE, 1998: 89–95
[ 3 ] F. Schmoeckel, S. Fatikow. Smart flexible microrobots for scanning electron microscope (SEM) applications. J. Intell. Mater. Syst. Struct., 2000, 11(3): 191–198 链接1
[ 4 ] B. Roland, Z. Wolfgang, C. Alain. Inertial drives for micro- and nanorobots: Analytical study. In: L. E. Parker, eds. Proceedings of SPIE Photonics East ‘95: Proc. Microrobotics and Micromachanical Systems Symposium, vol 2593. Philadelphia, 1995: 89–97
[ 5 ] S. Martel, et al. Three-legged wireless miniature robots for mass-scale operations at the sub-atomic scale. In: Proceedings of 2001 IEEE International Conference on Robotics & Automation. Seoul: IEEE, 2001: 3423–3428
[ 6 ] J. Brufau, et al. MICRON: Small autonomous robot for cell manipulation applications. In: Proceedings of the IEEE International Conference on Robotics & Automation. IEEE, 2005: 844–849
[ 7 ] M. Karpelson, G. Y. Wei, R. J. Wood. Driving high voltage piezoelectric actuators in microrobotic applications. Sens. Actuators A Phys., 2012, 4(176): 78–89
[ 8 ] P. Vartholomeos, E. Papadopoulos. Dynamics, design and simulation of a novel microrobotic platform employing vibration microactuators. Journal of Dynamic Systems, Measurement and Control, 2006, 128(1): 122–133
[ 9 ] R. W. Brockett. Control theory and singular Riemannian geometry. In: P. Hilton, G. Young, eds. New Directions in Applied Mathematics. New York: Springer-Verlag, 1981: 11–27
[10] J. P. Laumond. Feasible trajectories for mobile robots with kinematic and environment constraints. In: Proceedings of an International Conference on Intelligent Autonomous Systems, 1986: 346–354
[11] J. Barraquand, J. C. Latombe. On nonholonomic mobile robots and optimal maneuvering. In: Proceedings of the IEEE International Symposium on Intelligent Control. Albany: IEEE, 1989: 340–347
[12] J. A. Reeds, L. A. Shepp. Optimal paths for a car that goes both forwards and backwards. Pac. J. Math., 1990, 145(2): 367–393
[13] L. Gurvits, Z. Li. Smooth time-periodic feedback solutions for nonholonomic motion planning. In: Z. Li, J. F. Canny, eds. Nonholonomic Motion Planning. New York: Springer, 1993: 53–108
[14] R. M. Murray, S. S. Sastry. Nonholonomic motion planning: Steering using sinusoids. IEEE Trans. Automat. Contr., 1993, 38(5): 700–716 链接1
[15] K. Vlachos, P. Vartholomeos, E. Papadopoulos. A haptic tele-manipulation environment for a vibration-driven micromechatronic device. In: IEEE/ASME International Conference on Advanced Intelligent Mechatronics Systems. Zurich: IEEE, 2007: 1–6











 京公网安备 11010502051620号
京公网安备 11010502051620号




