
2015年 第1卷 第1期
《工程(英文)》 >> 2015年 第1卷 第1期 doi: 10.15302/J-ENG-2015024
通过行为足迹学习人类习惯的个性化服务机器人
1 California Institute of Technology, Pasadena, CA 91125, USA
2 The Chinese University of Hong Kong, Hong Kong, China
下一篇 上一篇
摘要
对家用的私人机器人来说,个性化服务和预先设计的任务同样重要,因为机器人需要根据操作者的习惯调整住宅状况。为了学习由诱因、行为和回报构成的操作者习惯,本文介绍了行为足迹,以描述操作者在家中的行为,并运用逆向增强学习技巧提取用回报函数代表的操作者习惯。本文用一个移动机器人调节室内温度,来实施这个方法,并把该方法和记录操作者所有诱因和行为的基准办法相比较。结果显示,提出的方法可以使机器人准确揭示操作者习惯,并相应地调节环境状况。
图片
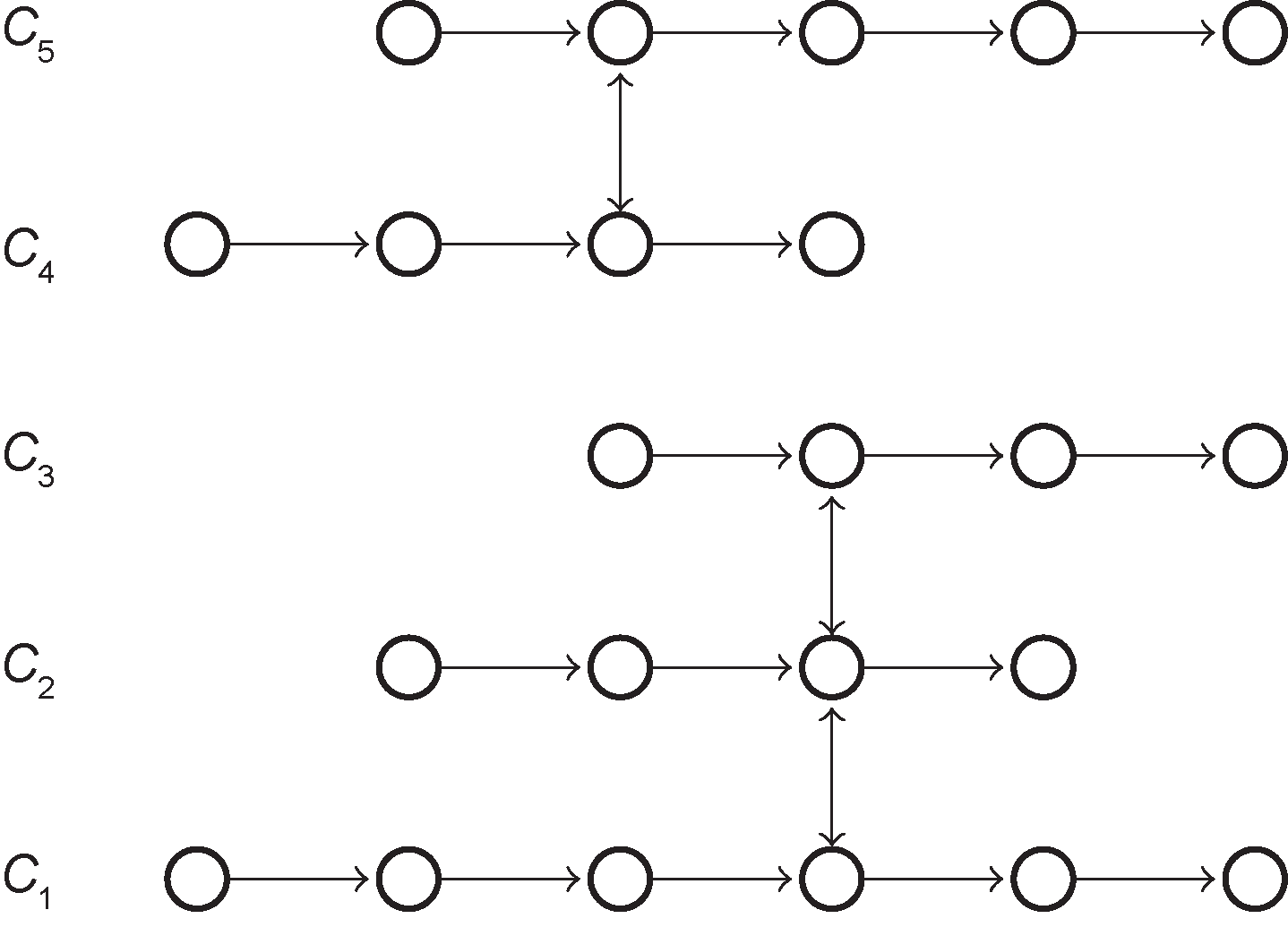
图1
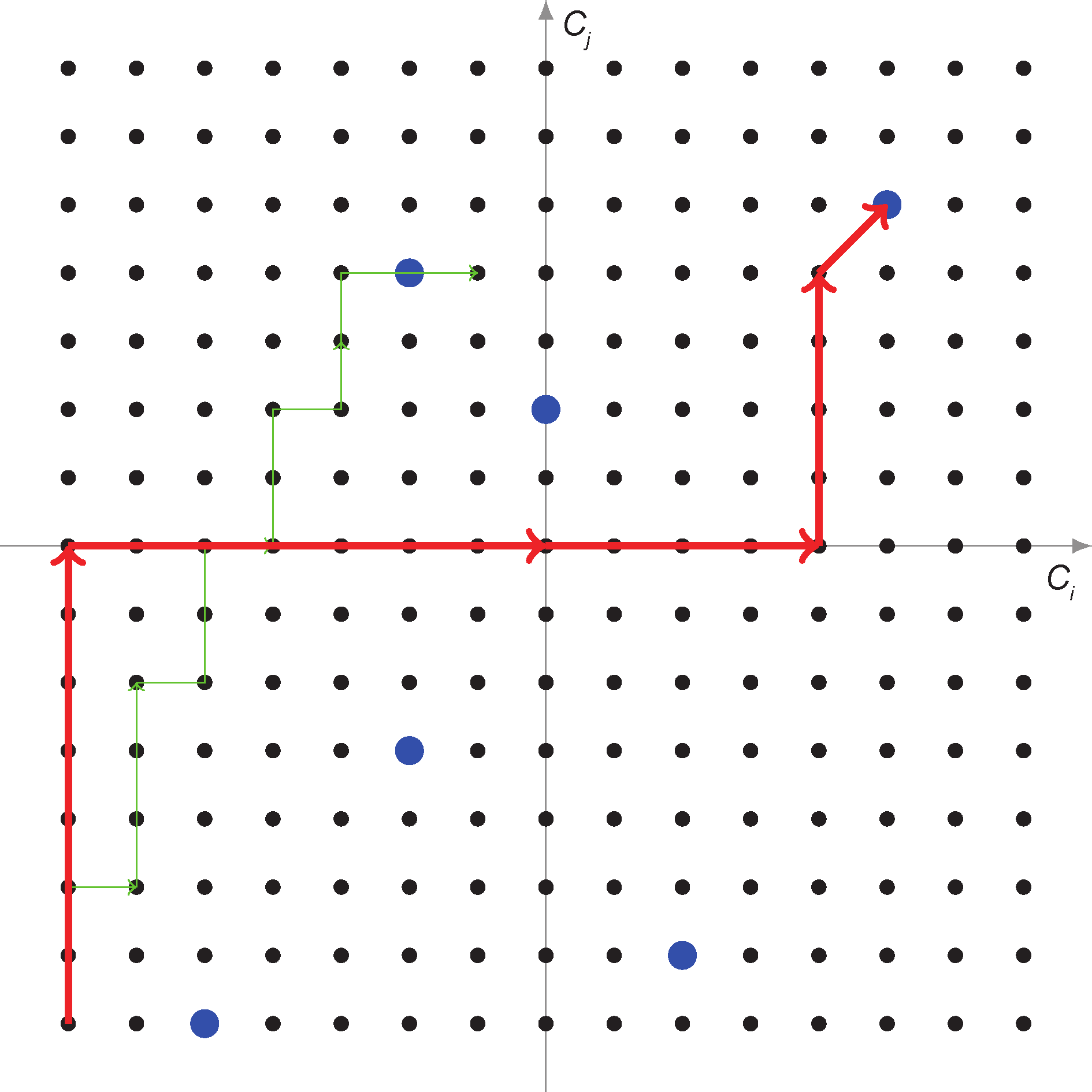
图2

图3

图4
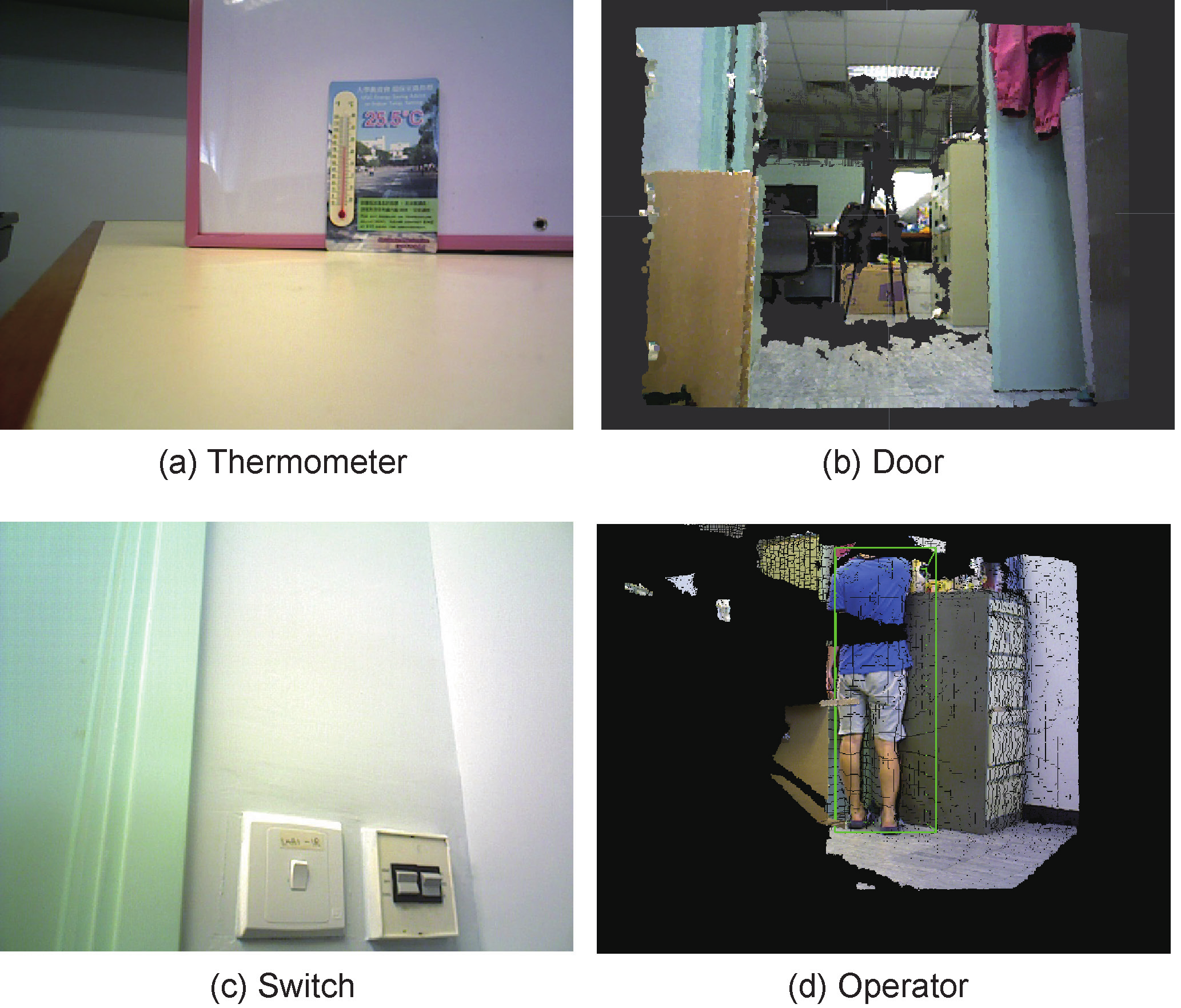
图5

图6
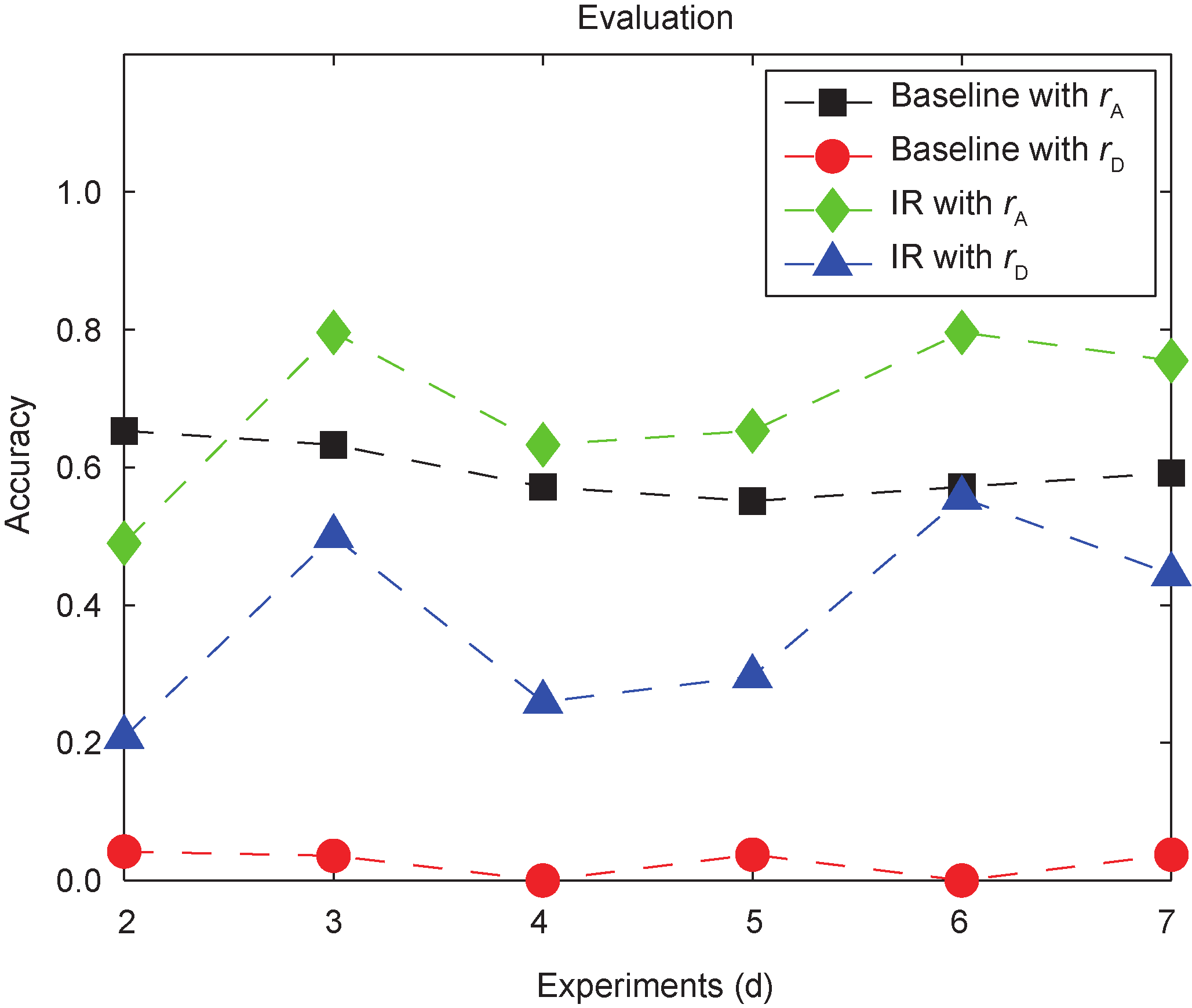
图7
参考文献
[ 1 ] W. Wood, D. T. Neal. A new look at habits and the habit-goal interface. Psychol. Rev., 2007, 114(4): 843–863 链接1
[ 2 ] W. Meeussen, Autonomous door opening and plugging in with a personal robot. In: Proceedings of 2010 IEEE International Conference on Robotics and Automation (ICRA), 2010: 729–736
[ 3 ] R. B. Rusu, I. A. Sucan, B. P. Gerkey, S. Chitta, M. Beetz, L. E. Kavraki. Real-time perception-guided motion planning for a personal robot. In: Proceedings of IEEE/RSJ International Conference on Intelligent Robots and Systems, 2009: 4245–4252
[ 4 ] J. F. Gorostiza, Multimodal human-robot interaction framework for a personal robot. In: Proceedings of the 15th IEEE International Symposium on Robot and Human Interactive Communication, 2006: 39–44
[ 5 ] K. A. Wyrobek, E. H. Berger, H. F. M. Van der Loos, J. K. Salisbury. Towards a personal robotics development platform: Rationale and design of an intrinsically safe personal robot. In: Proceedings of IEEE International Conference on Robotics and Automation, 2008: 2165–2170
[ 6 ] E. Falcone, R. Gockley, E. Porter, I. Nourbakhsh. The personal rover project: The comprehensive design of a domestic personal robot. Robot. Auton. Syst., 2003, 42(3¯4): 245–258 链接1
[ 7 ] L. Tonin, T. Carlson, R. Leeb, J. del R. Milla?n. Brain-controlled telepresence robot by motor-disabled people. In: Proceedings of the Annual International Conference of the IEEE Engineering in Medicine and Biology Society, 2011: 4227–4230
[ 8 ] T. C. Tsai, Y. L. Hsu, A. I. Ma, T. King, C. H. Wu. Developing a telepresence robot for interpersonal communication with the elderly in a home environment. Telemed. J. E Health, 2007, 13(4): 407–424 链接1
[ 9 ] P. R. Liu, M. Q. H. Meng, P. X. Liu, F. F. L. Tong, X. J. Chen. A telemedicine system for remote health and activity monitoring for the elderly. Telemed. J. E Health, 2006, 12(6): 622–631 链接1
[10] M. Baeg, J. H. Park, J. Koh, K. W. Park, M. H. Baeg. Building a smart home environment for service robots based on RFID and sensor networks. In: Proceedings of International Conference on Control, Automation and Systems, 2007: 1078–1082
[11] N. Oliver, A. Garg, E. Horvitz. Layered representations for learning and inferring office activity from multiple sensory channels. Comput. Vis. Image Underst., 2004, 96(2): 163–180 链接1
[12] S. Fine, Y. Singer, N. Tishby. The hierarchical hidden Markov model: Analysis and applications. Mach. Learn., 1998, 32(1): 41–62 链接1
[13] R. S. Sutton, A. G. Barto. Reinforcement Learning: An Introduction. Cambridge, MA: MIT Press, 1998
[14] B. D. Argall, S. Chernova, M. Veloso, B. Browning. A survey of robot learning from demonstration. Robot. Auton. Syst., 2009, 57(5): 469–483 链接1
[15] P. Abbeel, A. Y. Ng. Apprenticeship learning via inverse reinforcement learning. In: Proceedings of the Twenty-first International Conference on Machine Learning, 2004: 1
[16] A. Y. Ng, S. J. Russell. Algorithms for inverse reinforcement learning. In: Proceedings of the Seventeenth International Conference on Machine Learning, 2000: 663–670
[17] G. Grisetti, C. Stachniss, W. Burgard. Improved techniques for grid mapping with Rao-Blackwellized particle filters. IEEE Trans. Robot., 2007, 23(1): 34–46 链接1
[18] T. Joachims. Making large-scale SVM learning practical. In: B. Schölkopf, C. J. C. Burges, A. J. Smola, eds. Advances in Kernel Methods: Support Vector Learning. Cambridge, MA: MIT Press, 1999: 169–184











 京公网安备 11010502051620号
京公网安备 11010502051620号




