
1 引言
暖通空调系统 (HVAC, heating, ventilating, and air-conditioning systems) 中存在温度、湿度、压力等多个相互作用的变量, 由蒸发器回路、压缩机回路、冷凝器回路等多个子系统组成, 构成了高度非线性、时变特征和不确定多变量系统
预测函数控制最早是由Richalet和Kuntze等人在20世纪80年代后期提出来的一种新型模型预测控制算法, 并成功应用于工业机器人的快速高精度跟踪控制
2 模糊T-S模型辨识
为设计基于模糊T-S模型的预测函数控制器, 首先必须建立系统的模糊T-S模型, 模糊辨识的主要目的是通过结构辨识和未知参数估计建立一组模糊规则集合, 从而能够准确描述系统输入输出变量之间的动态特性。采用T-S型模糊模型的一般结构表达式及其辨识方法
![]()
其中ym (k) , u (k) 分别是系统在k时刻的输出, 输入变量, f (·) 是一个非线性函数。由于模糊系统的通用逼近性

其中, Aj是ym (k) 所属的模糊集合, μAj (ym (k) ) 表示ym (k) 在集合Aj上的隶属度。l表示模糊模型的规则个数, 通过Sum-product模糊推理及加权平均法解模糊得到其全局线性模型

其中

确定了模糊模型的结构之后, 用最小二乘法辨识模糊模型式 (2) 的系统参数amj, bmj, rmj, j = 1, 2, …, l。首先需要在动态过程中采集非线性系统式 (1) 的N+1组 (N足够大) 输入输出采样数据对, 然后令ψj (k) =[βj (k) ym (k) βj (k) u (k) βj (k) ]则由采样得到的输入输出数据对组成矩阵形式

由第j条规则构成的输出变量为yjm (k+1) =βjym (k+1) , 于是输出数据向量为

令θj =[amjbmjrmj]T, 则yjm (k+1) =ψj (k) θj。根据最小二乘法得到第j条规则的模糊模型参数
![]()
同理可以辨识出所有模糊规则的模型参数, 从而得到系统的模糊模型的全局线性模型为
![]()
其中
3 模糊预测函数控制 (FPFC)
预测控制是基于动态过程的预测模型, 预测未来一段时域上的输出信号, 利用滚动优化技术, 通过使性能指标式

达到最小, 获得预测控制律, 将预测控制律的第一个元素作用于系统。其中H, Nu分别是输出预测和控制时域, αi, βj分别是输出和输入加权系数, yp (k+i) , yr (k+i) , u (k+i-1) 分别是预测输出、参考输出和控制量。
模糊预测函数控制 (FPFC) 是在系统T-S模糊模型式 (5) 的基础上, 对系统式 (1) 进行预测函数控制器设计。假设一步全局模糊T-S预测模型是一阶线性模型
![]()
其中ap, bp, rp是已知常数, 假设u (k) =u (k+1) =…=u (k+H) 且λ=0, 根据预测模型式 (7) , 由当前预测输出yp (k) 和控制输入u (k) 计算出未来H步的输出预测值

参考输出信号模型选取微分方程
![]()
其中, ar, br为已知常数并且满足br/ (1-ar) = 1, ω (k) 为参考信号。
于是yr (k+1) =aryr (k) + (1-ar) ω (k) (10)
故k+H时刻的参考轨迹预测值是

模糊预测函数控制的主要思想是使目标增量和模型输出增量相等。目标增量为预测参考信号yr (k+H) 与实际过程输出信号ym (k) 之间的差, 即
![]()
预测模型输出增量为
![]()
由式 (8) 知

由上述各方程及预测函数控制的目标, 即在k时刻通过Δm (k) =Δp (k) 得到k时刻的控制律为

4 仿真结果
考虑HVAC系统的AHU单元, 它由蒸发器、风阀、回风机、冷凝水泵和节流控制阀等组成 (见图1) 。回风机的干球温度Tao作为AHU系统的输出变量, 冷凝水的流速
![]()
其中, f表示AHU系统的输入和状态变量之间的非线性时变函数,


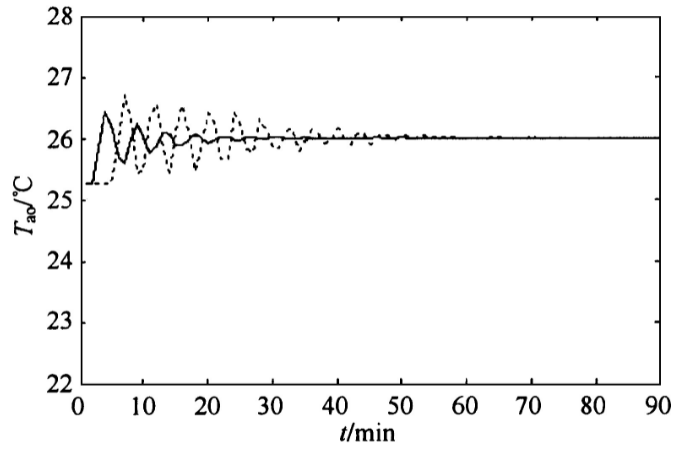
《图2 AHU系统控制器性能的仿真结果》
图2 AHU系统控制器性能的仿真结果 Fig.2 Simulation result of AHU systems controller performance
仿真结果表明, 采用基于T-S模糊模型的预测函数控制算法, 在AHU系统中通过冷凝水的流速来控制回风干球温度是有效的, 从室温条件下经过约16 min的调节时间, 房间温度就能达到设定温度。与常规的PID控制器相比, FPFC具有超调量小, 调整时间短等优良的动态性能, 并且不存在稳态偏差, 跟踪迅速。
5 结语
HVAC系统是存在高度非线性、时变特征以及扰动和不确定性等因素的复杂非线性系统, 针对HVAC系统难以控制的现状, 提出了一种新型的基于T-S模糊模型的预测函数控制器设计方法。应用到AHU系统中的仿真结果表明, 该算法是一种跟踪性能好、鲁棒性强的有效控制方法。与常规的PID控制器相比, 该方法具有超调量小、调整时间短等优良的动态性能。模糊T-S模型预测函数控制成功地应用于HVAC系统的AHU单元回风干球温度控制, 体现了该方法的实用性。并且说明该算法也适用于存在着高度非线性以及不确定性等因素的复杂系统。下一步将研究基于更高阶的模糊T-S预测模型的预测函数控制。
参考文献
[2] Ghiaus C.Fuzzy model and control of a fan-coil[J].Energy and Buildings, 2001, 33:545~551
[6] 席裕庚.预测控制, 第一版[M].北京:国防工业出版社, 1993
[7] 韩璞, 王东风, 王国玉, 等.多模型预测函数控制及其应用[J].控制与决策, 2003, 18 (3) :378~381











 京公网安备 11010502051620号
京公网安备 11010502051620号




