

《1 前言》
1 前言
中国城市轨道交通建设规模和速度位居世界首位[1]。“十一五”期间全国已修建完成 1500 多千米,计划“十二五”期间还将修建 2500 多千米,总投资超过 10000 亿元[2]。2012 年 9 月 5 日,国家发展改革委员会集中批复了 25 条地铁(轻轨)项目,除上海、广州、深圳一线城市外,常州、石家庄、太原、兰州等二三线城市地铁规划建设正在“急行军”,总投资超过 7000 亿元。
然而,地铁工程施工面临的地质水文条件多样,不可避免地需要穿越城市内部大量敏感的城建设施和生命线系统(如供水、排水系统;天然气、热力系统;电力系统;通信系统等),地下及地上既有结构在复杂环境作用下不确定性高,在国内外都属于高风险生产活动。根据全球 500 强企业慕尼黑再保险公司的统计资料,1994—2007 年世界主要地铁隧道在施工过程中仅塌方事故造成的经济损失高达 2.5 亿美元[3]。中国再保险(集团)股份有限公司统计数据显示,国内地铁工程平均保险赔付率高达 60 %(不含上海地铁四号线事故,含该事故的全国赔付率高达 1000 %)[4],我国北京、上海、杭州等城市地铁施工均发生过重大事故,安全形势严峻[5]。因此,加强地铁施工安全控制,建立复杂环境下地铁施工安全控制关键技术体系是非常必要的。
《2 地铁施工安全控制关键技术体系》
2 地铁施工安全控制关键技术体系
地铁施工出现安全事故的原因多种多样。从信息科学角度看,一个突出的问题是施工安全数据采集和传递不及时,信息分析和利用不充分,安全知识重用和共享不足,地铁工程施工全过程安全控制仍是一个“黑箱”控制,表现在以下几个方面。
1) 地铁施工安全致险因素复杂多样,施工前期安全风险识别主要通过有一定经验的工程师或专家查阅工程规范、审查工程图纸等这一人工方式完成,主观性较大,且不利于安全知识的显性化,安全知识重用和共享程度不够。
2) 在施工中,地铁施工风险控制主要依据实际监测数值的大小进行预警,预警控制值固定单一,与工程实际严重脱节,全国各地区 50 %以上的监测数据均超出控制值,实际上处于无标准可依的状态[1,14],亟待建立充分信息条件下的动态综合预警方法。另外,传统预警结果仍停留在二维平面上,缺乏在时间和三维空间上动态定位、跟踪危险工序及部位的技术手段。
3) 高承压水和超近距离穿越等特殊区段施工风险巨大,所引发的各种破坏和次生灾害后果严重,极易危害公共安全,演变为社会危机,施工中迫切需要根据实际工况提供实时的安全状态分析结果,并能及时有效地采取施工控制和应急措施,而传统技术难以满足对施工安全控制的实时性和一体化的要求,迫切需要集自动连续监测、人员跟踪定位、实时预警于一体的安全集成控制系统。
为此,本文提出以地铁施工安全风险识别与预警为核心,建立一套从风险识别、预警到控制的复杂环境下地铁施工安全控制关键技术体系,包括施工前安全风险自动识别、施工中风险时空演化耦合分析与预警、高承压水与超近距离穿越条件下特殊区段施工安全控制等关键技术,以实现复杂环境下地铁施工全过程安全动态控制,如图 1 所示。
《图1》
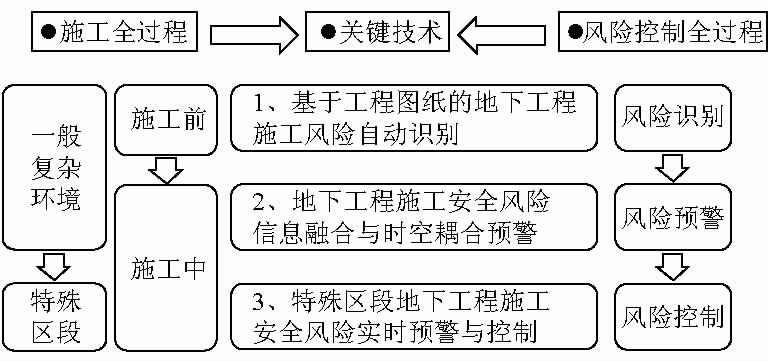
图1 地铁施工安全风险控制技术体系框架
Fig.1 Architecture of the key technologies of metro construction safety control
《3 基于工程图纸的地铁施工风险自动识别技术》
3 基于工程图纸的地铁施工风险自动识别技术
根据国家标准《城市轨道交通地下工程建设风险管理规范 ( GB 50652—2011)》中 3.3.2 款规定,施工前应针对地下工程建设风险进行分项独立风险辨识[6],做到事前控制。国际隧道学会(ITA)、国际隧道保险组织(ITIG)已发表相关的国际风险评估需求和指南,对风险评估过程、评估方法给出了建议,但未给出具体如何识别地铁工程施工安全风险的方法[7,8]。国内外通常的做法是依靠有一定经验的工程师查阅工程规范、审查工程图纸等这一人工方式完成,阻碍了安全风险知识的显性化,不利于安全风险知识的重用和共享,一定程度上增加了安全风险管控的盲目性。
《3.1 地铁施工安全风险与工程图纸信息的关联分析》
3.1 地铁施工安全风险与工程图纸信息的关联分析
工程图纸是工程师的语言,工程特性、建造设计、建筑法规的信息载体,包含结构构件属性及约束关系、结构与周边环境的相互作用、施工工艺步骤等各类信息。大部分地铁施工安全风险都与这些工程信息(技术参数)相关,经验丰富的领域专家、工程师通过人工阅读工程图纸就可以识别出风险及致险因素。
然而,目前现有自动识图技术只能进行图元的识别,不能直接提取带有安全风险属性的参数信息。因此,必须建立工程图纸中的图元信息与工程技术参数之间的联系,并分析出在致险因素作用下关联的风险。
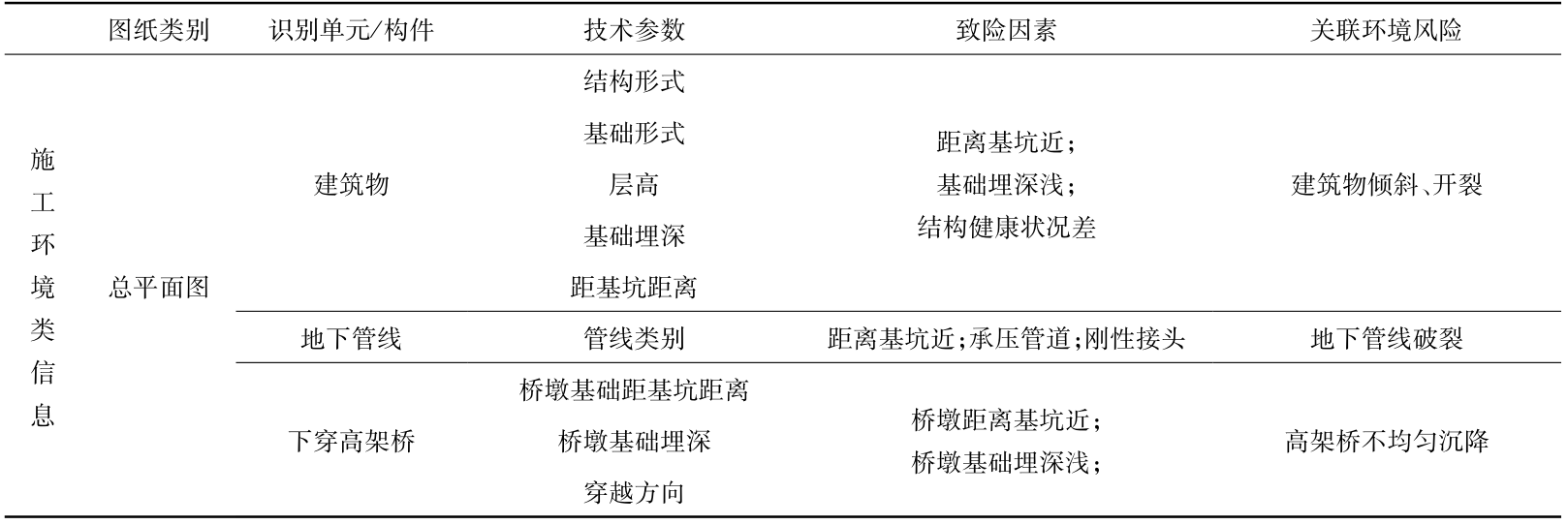
通过对地铁工程图纸中图形元素(图元)的特征识别和语义分析,地铁施工图中蕴含的技术参数包括以下 4 类:a. 项目特征类信息;b. 施工工艺类信息;c. 地质水文类信息;d. 施工环境类信息等。从 a、b 类信息中一般可识别出技术风险,从 c、d 类信息中可识别出地质风险和环境风险。以地铁车站工程为例,表 1~表 4 给出从图纸中获得的4类信息与可识别的风险及致险因素的关联关系。
在此基础上,可根据不同的工程类型(深基坑或隧道)定义需识别的工程图纸类别及计算机按序识图策略,采用巴科斯范式(BNF)定义每类图纸中需要读取的工程技术参数,设计定向识图增量搜索策略,然后,通过设计基于语法规则匹配、基于图形模板匹配和基于拓扑结构匹配的3种算法对计算机识别的基本图元(如直线、圆、文字等)进行面向安全风险的语义解析和计算分析,实现从工程图纸中自动提取安全风险属性及工程技术参数。
《表1》
表1 项目特征类工程技术参数-风险致险因素关联表
Table 1 Relationship between risk factors and technical parameters of project characteristics

《表2》
表2 施工工艺类工程技术参数-风险致险因素关联表
Table 2 Relationship between risk factors and technical parameters of construction methods

《表3》
表3 地质水文类工程技术参数-风险致险因素关联表
Table 3 Relationship between risk factors and technical parameters of geology and hydrology

《表4》
表4 施工环境类工程技术参数-风险致险因素关联表
Table 4 Relationship between risk factors and technical parameters of site environment
《3.2 地铁施工安全风险识别规则的获取、表示与自动推理》
3.2 地铁施工安全风险识别规则的获取、表示与自动推理
从表 1~表 4 中可以看出,工程图纸中技术参数的具体取值决定致险因素存在的可能性,致险因素的不同组合决定风险事件发生的可能性。因此,地铁施工安全风险识别规则是描述致险因素的不同组合导致风险发生的可能性,其内涵是对风险识别不确定知识的一种形式化描述,而解决安全知识重用和共享的关键问题就是如何有效地获取、表示风险识别规则并建立自动推理机制。
上述风险识别规则可以通过以下4种途径获取:a. 工程经验分析法,即从专家调研入手,选取与风险识别直接相关的隐性知识显性化,总结出地下工程施工安全风险的主要类型、描述、主要成因;b. 风险定义语义分析法,对施工手册和科技文献明确、清晰的风险事件定义进行语义分析,列举出致险因素线索,适用于风险定义清晰,作用机理明确的风险事件;c. 规范条文分析法,即从目前已颁布的规范条文中,利用语义挖掘技术抽取、总结若干对风险识别有价值的信息,如“必须”、“严禁”、“宜”、“不宜”等含义中推理出可能存在的风险及致险因素;d. 可靠度分析法,对于适宜建立力学分析解析模型或存在解析经验公式的风险事件,建立其极限状态函数或仿真计算模型,获得致险因素定量规则。
风险识别规则采用扩展的产生式表示为 If e Then h(CF(h,e),λ),其中前提条件 e 为可能发生风险的致险因素的组合,表示为e1(ω1)∧e2(ω2)∧e3(ω3)…的形式,每个致险因素 ei 均具有权重(ωi)和取值可信度CF(ei);CF(h,e)为规则的可信度;h 为结论,即风险事件。获得一条风险识别规则需完成以下步骤:a. 确定规则前提中包含的致险因素;b. 确定致险因素权重;c. 确定致险因素取值可信度;d.确定规则的可信度和阈值。
风险识别规则的自动推理过程如图 2 所示,按规则组号一组组地取出规则进行检索匹配,将规则前提描述串构造成条件链表形式。将链表中的每一元素与推理工作区中规则前提表中的记录匹配,获得每一前提条件的可信度取值,按CF(e)= ×CF(ei)计算前提组合的可信度,其中 ωi 为第 i 个致险因素的权重,CF(ei)为第 i 个致险因素的取值可信度。若规则前提组合可信度CF(e)大于规则阈值(λ),则采用此规则,否则放弃。最后按式CF(h)=CF(h,e)×CF(e)计算结论可信度,其中CF(h,e)为规则可信度,CF(h)为结论可信度,从而选取有效规则的结论编码。
×CF(ei)计算前提组合的可信度,其中 ωi 为第 i 个致险因素的权重,CF(ei)为第 i 个致险因素的取值可信度。若规则前提组合可信度CF(e)大于规则阈值(λ),则采用此规则,否则放弃。最后按式CF(h)=CF(h,e)×CF(e)计算结论可信度,其中CF(h,e)为规则可信度,CF(h)为结论可信度,从而选取有效规则的结论编码。
《图2》
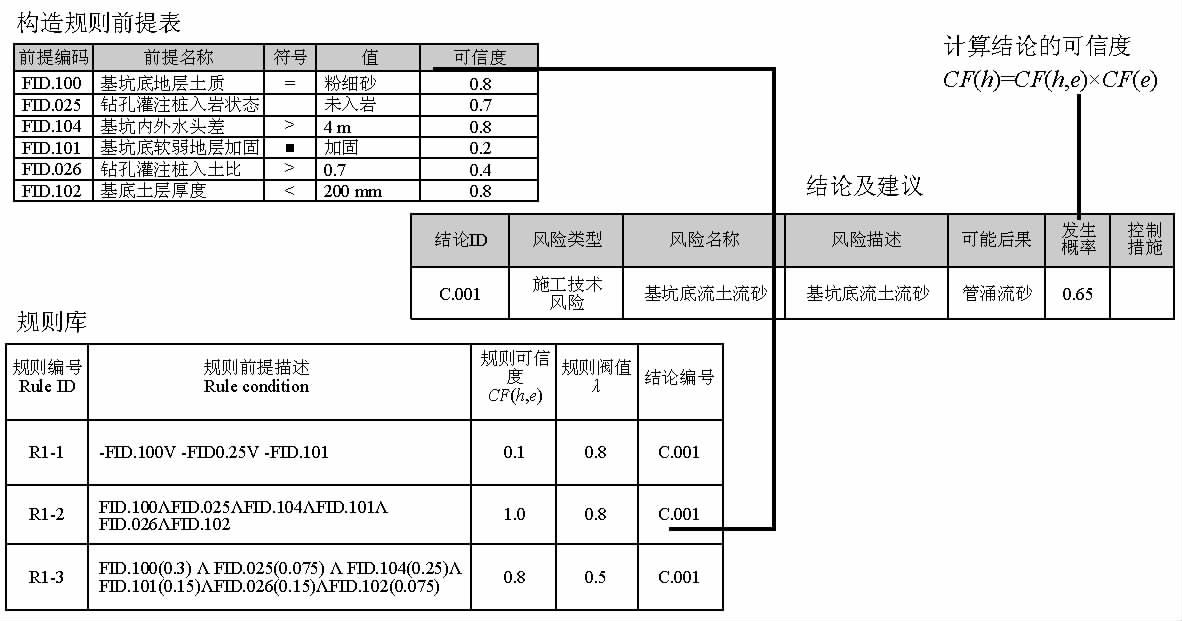
图2 推理计算过程
Fig. 2 Automatic reasoning process of the safety identification
《3.3 基于工程图纸的地铁施工安全风险自动识别系统》
3.3 基于工程图纸的地铁施工安全风险自动识别系统
通过上述风险规则的建立,本文提出一种新的安全风险识别技术方法,即从工程图纸中利用计算机存储的显性安全知识自动识别安全风险,从而开发出地铁施工安全风险自动识别系统(SRIS)。系统通过计算机自动识别地铁工程施工图纸,获取与风险识别相关联的技术参数,借助后台已建立的风险识别知识库,调用合适的风险识别规则进行逻辑推理,计算出地铁工程施工可能存在的安全风险及其发生概率,并提出处理措施及建议。本系统构建了 221 条标准规则、101 条专家规则以及 156 条计算规则在内的识别规则库[9],覆盖深基坑、隧道及环境风险(强度破坏、稳定性破坏)共计 67 类,其自动识别过程如图 3 所示。
《图3》
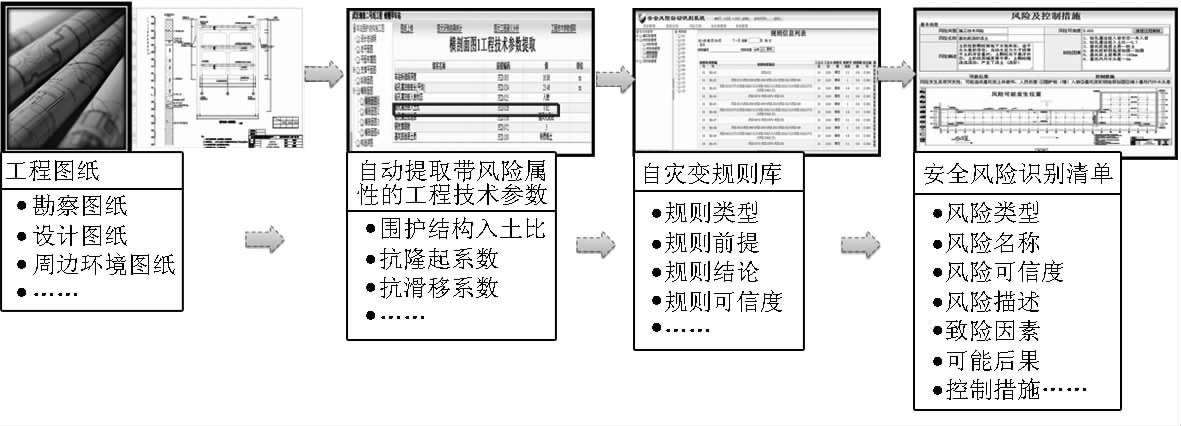
图3 从地铁工程图纸中自动识别安全风险过程
Fig. 3 Automatic identification process of the safety risk from the designs
《4 地铁施工安全风险信息融合与时空耦合预警技术》
4 地铁施工安全风险信息融合与时空耦合预警技术
地铁施工过程中的安全预警是安全风险事故中控制的重要手段。地铁施工过程中的安全风险时空演化规律与耦合机理难以描述,为了提高安全预警的精度和可靠性,必须最大限度地利用施工现场的安全信息,从而在信息充分的条件下进行安全预警。另外,地铁施工安全风险是随着时间的推移在空间上不断变化的,亟需基于四维时空(时间和三维空间)进行危险工序、部位的动态定位及跟踪。本文提出的地铁施工安全风险信息融合与时空耦合的预警技术,包含以下两个方面。
《4.1 基于多源信息融合的地铁施工安全预警模型》
4.1 基于多源信息融合的地铁施工安全预警模型
从工程实践角度看,人工进行地铁施工安全预警的过程如下:经验丰富的地铁工程专家或技术人员在掌握各种工程资料和监测数据的基础上,进行必要的现场实地踏勘和巡视,判断当前施工情况下或者可预见的施工进度内地铁工程施工中各种结构体、环境及机械设备等警素的安全状态,做出预警决策。这一过程主要依赖个人的工程经验,其有效性已反映在大量的成功工程实例中。人工预警过程本质上是对地铁施工过程中获得的各种与结构、环境及机械等安全有关的信息进行搜集、加工、筛选、提炼、综合,即多源信息融合(MSIF)过程,再用融合后的信息进行判断和决策。
为了建立一个能够辅助和替代地铁施工安全风险人工预警过程的集成化、自动化、智能化预警模型,同时提高预警模型的精度和可靠性,最直接有效的方法就是融入更多的安全信息,但这又必然会导致与融合算法计算量、模型泛化能力等之间的矛盾,最终极可能引起系统崩溃。采用多源数据分层融合的思想,设计基于多源信息融合的地铁施工安全预警模型,如图 4 所示。
《图4》
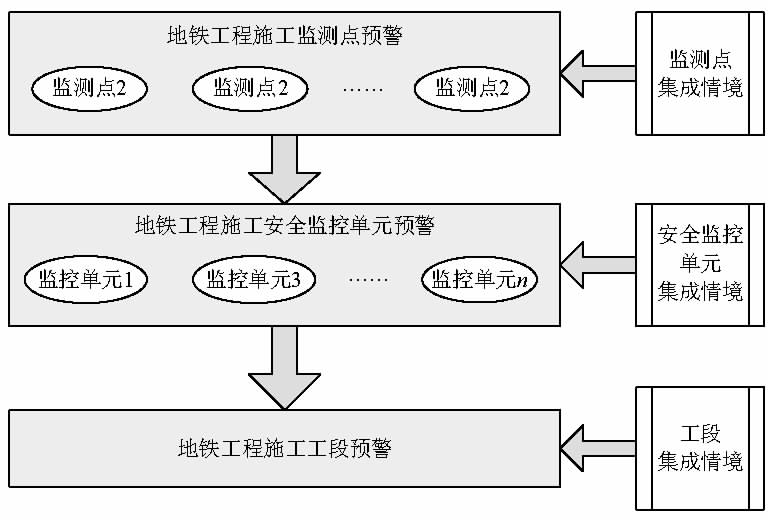
图4 地铁施工分层预警模型
Fig. 4 Hierarchical model for early warning in metro construction
基于信息融合的地铁施工安全风险预警模型包括监测点预警、安全监控单元预警、工段预警3个层级的信息融合过程,分别对应数据级融合、特征级融合和决策级融合,体现着地铁施工过程中冗余安全信息、互补安全信息和协同安全信息的融合,从而实现由“点预警”到“面预警”再到“体预警”的综合过程。基于信息融合的地铁施工安全风险预警模型中每一层级的预警都需要在特定的时空条件、相关的背景和工程环境下才能实现。这些与每一层数据融合过程紧密相关的时空、背景和环境就是分层情境要素(情境维度)。集成情境就是把情境要素明确、系统地集成到不同层次的地铁工程施工安全预警模型中,提高信息融合结果的准确性和可靠性,提升地铁施工安全风险预警模型的工程应用效果。
基于多源信息融合的地铁施工安全预警模型主要由3个方面的信息来源构成:a. 通过对地铁施工监测数据及监测误差的统计特性分析,提出了表征地铁施工监测数据特点的滤波去噪小波基及小波分解层数的最优选取方法,有效地实现监测数据的快速去伪降噪[10];b. 以监测信息事实表为核心,构建包括时间维、空间维和情境维的多维数据星形模型,建立集成情境的地下工程数据仓库,对施工过程中产生的海量、多源、异构工程信息进行结构化存储,实现了监测数据与情境数据的信息关联;c. 通过模拟专家进行地铁施工警情的人工决策过程,基于实测数据、预测数据及巡视数据,分别利用径向基函数(RBF)神经网络和 D-S 证据融合理论,进行多源信息的智能融合与警情决策,实现充分信息条件下的安全预警,如图 5 所示。国家标准《地铁工程施工安全评价标准(GB 50175—2011)》[11]首次明确规定了这一安全预警技术的要求,从而弥补了现行的单一预警准则的不足。
《图5》
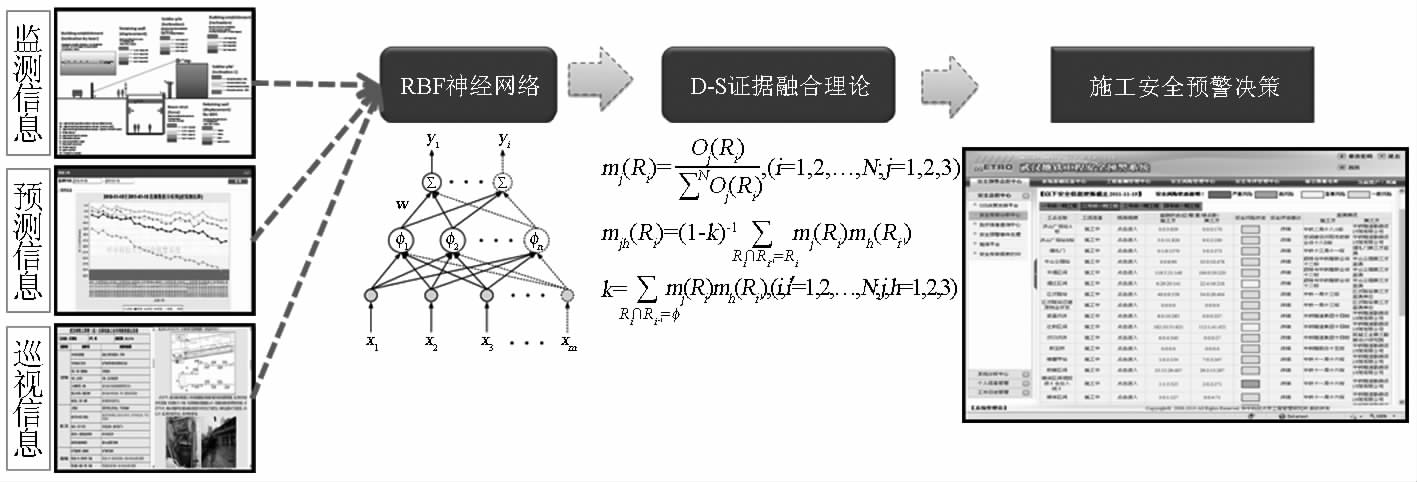
图5 基于多源异构信息融合的地铁施工安全预警模型
Fig. 5 Safety risk early warning model based on multisource data fusion
《4.2 基于建筑信息模型(BIM)的安全风险时空耦合可视化表达》
4.2 基于建筑信息模型(BIM)的安全风险时空耦合可视化表达
针对现有预警结果局限在二维平面描述上,开发了基于BIM的安全N维可视化技术(见图6),以实现在时间和三维空间上动态定位和跟踪安全风险。a. 通过将包含岩土地质、地下管线、周边建筑、机械人员、施工监测等在内的工程三维实体与施工工序对应的时间维进行集成,形成地铁施工的 4D 模型[12];b. 以施工进度为横轴,风险程度为纵轴,刻画地铁施工各种安全风险时空演化非线性过程,实现对安全风险时空演化规律的定量精确描述;c. 在此基础上,将各种安全风险时空演化过程按照一定的时间粒度(施工工序)进行叠加,得到不同施工行为、结构本体与岩土环境综合作用下风险的时空耦合结果,形成面向安全风险耦合分析的 N 维可视化技术,从而支持在时间和三维空间上动态定位、跟踪危险工序及部位,如图 7~图 9 所示。
《图6》
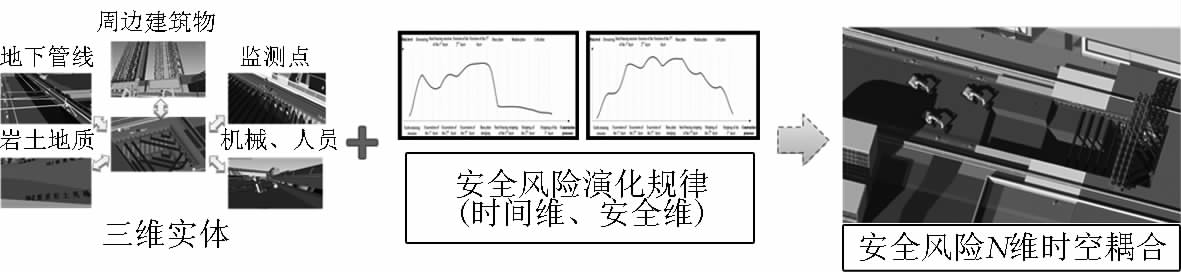
图6 安全风险时空演化与耦合的 N 维可视化技术
Fig. 6 N-D technology for visualization of spatio temporal evolution and coupling mechanism of safety risk
《图7》

图7 某地铁车站 BIM 模型
Fig. 7 BIM model of certain metro station
《5 特殊区段地下工程施工安全风险实时感知与控制》
5 特殊区段地下工程施工安全风险实时感知与控制
高承压水与超近距离穿越[13]等特殊区段的地铁工程施工安全风险极高,传统技术难以满足施工安全控制的实时性和一体化的要求,如高承压水下地铁隧道联络通道冻结施工中,水热力耦合作用机理不清,冻结效果受高水压动水影响,隧道结构、联络通道初期支护和二次衬砌结构受力体系不断发生变化(冻胀、开挖、支护及冻融),一旦发生安全隐患和险情,常会引发不可估计的灾难性后果。2003 年 7 月 1 日,上海轨道交通四号线越江隧道联络通道施工事故正是因冷冻法失效导致大量泥沙涌入隧道,直接经济损失 6 亿人民币[14]。因此,为了降低高风险特殊区段地铁施工灾难性事故发生概率,需要实时感知安全风险,以便及时防范事故发生。下面以本课题组承担的武汉地铁越江隧道联络通道施工风险控制为例,介绍其施工安全风险实时感知及预警系统。
《图8》
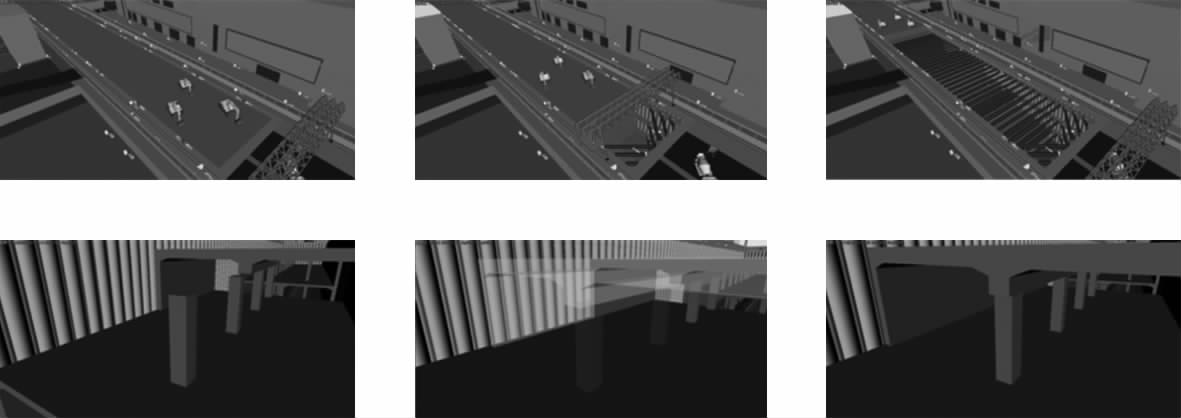
图8 某地铁车站4D模型
Fig. 8 4D model of certain metro station
《图9》
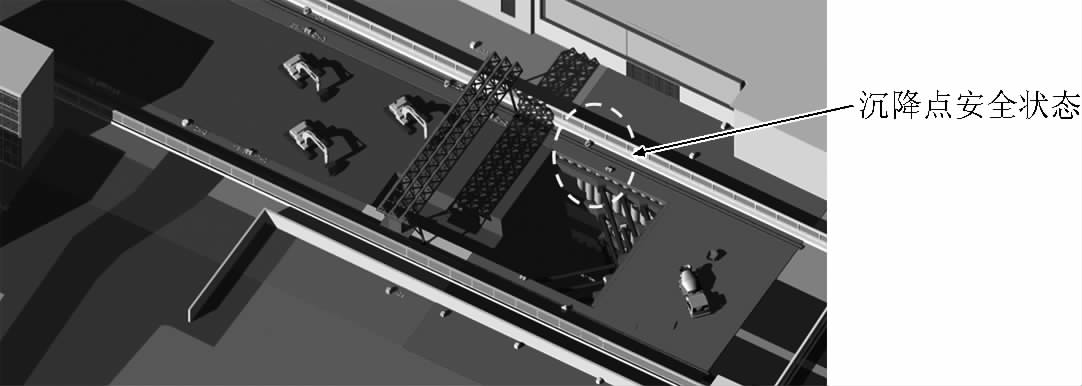
图9 某地铁车站5D安全模型
Fig. 9 5D model of certain metro station
《5.1 安全风险实时感知系统》
5.1 安全风险实时感知系统
为了实现环境与结构的多物理量连续实时感知,提高风险特殊区段的地铁施工安全信息的采集和传输能力,本文首次将光纤光栅传感技术引入长江隧道联络通道冻结施工中,利用光纤光栅传感器具有耦合监测、高精度、自动连续、抗电磁干扰、不受水和潮气影响、可远距离传输等诸多优点,分别进行水平冻土、联络通道初支和既有隧道管片的温度-应变耦合监测,构建基于光纤光栅的联络通道施工多场耦合实时感知系统,实现整个施工周期内自动连续采集数据,实时分析与预警。实时感知系统由独立供电系统、数据存储分析系统、数据实时采集系统三大部分组成,并增设防尘防水保护系统,如图 10 所示。
其中,本文提出了一种用于水平冻结冻土的多场耦合实时感知方法,即利用冻结管必须深入土体内部进行热交换的特点,在冻结管中预埋光纤光栅传感器,再利用钻孔设备将预埋好光纤光栅传感器的冻结管分段打入土层,冻结时预埋传感器的冷冻管不充入冷冻循环液,形成专用的冷冻监测管。为了保证冷冻监测管中传感器的成活率,每根冷冻管中按 1.5~2 m 间隔布置一个温补应变传感器,从隧道左线向右线打入 5 根预埋传感器的冷冻管,共计 20 个传感器,最深处传感器位置距离管片外壁 10 m,冻土安全传感布设方案如图 11 所示。利用光纤光栅解析仪分析得到冻土温度变化规律,如图 12 所示。
《图10》
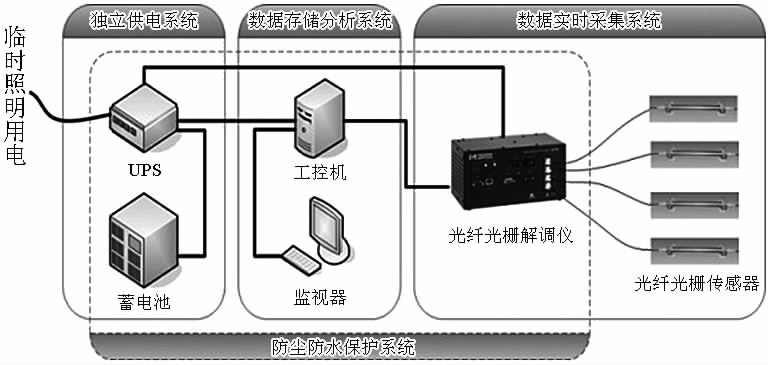
图10 实时感知系统组成
Fig. 10 Architecture of the real-time sensing system
《图11》
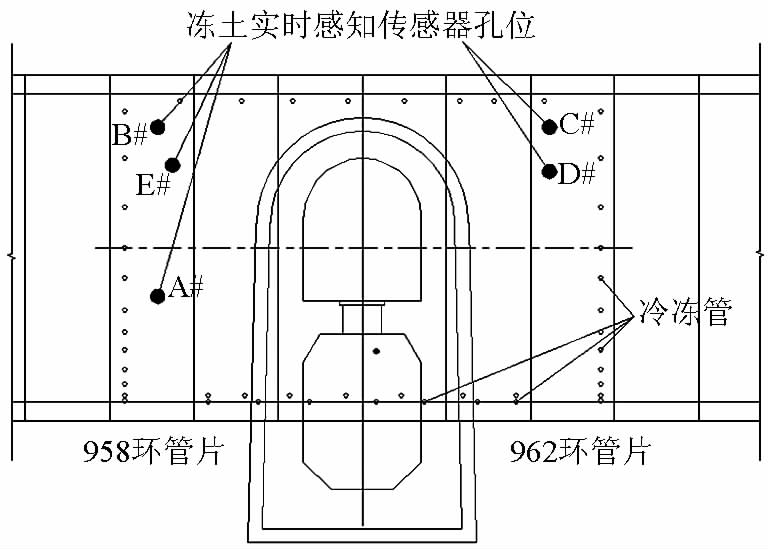
图11 冻土安全实时感知布置平面图
Fig. 11 Layout of sensors for real-time safety sensing of frozen soil
《图12》
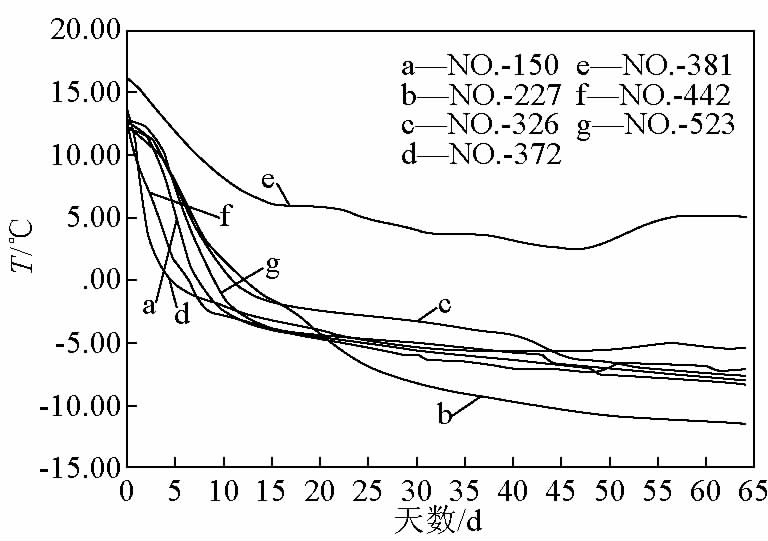
图12 冻土温度变化曲线
Fig. 12 Temperature curve of frozen soil
《5.2 安全风险实时预警系统》
5.2 安全风险实时预警系统
根据海因里希事故连锁理论[8]、轨迹交叉理论[15]等事故致因理论,施工中物的不安全状态或人的不安全行为将导致安全事故的发生。因此,江底地铁隧道联络通道施工中,除了建立多场耦合实时感知系统以实时获取物的状态外,人的行为对于施工安全控制而言更为重要。本文在多场耦合实时感知系统的基础上,实现复杂环境下长大隧道中实时跟踪移动目标,并将联络通道施工过程中环境、结构和人的安全信息综合起来进行安全分析判断,及时有效地发布预警信息,第一时间通知现场作业人员采取应急措施,实现安全知控一体化和实时化,如图 13 所示。
《图13》
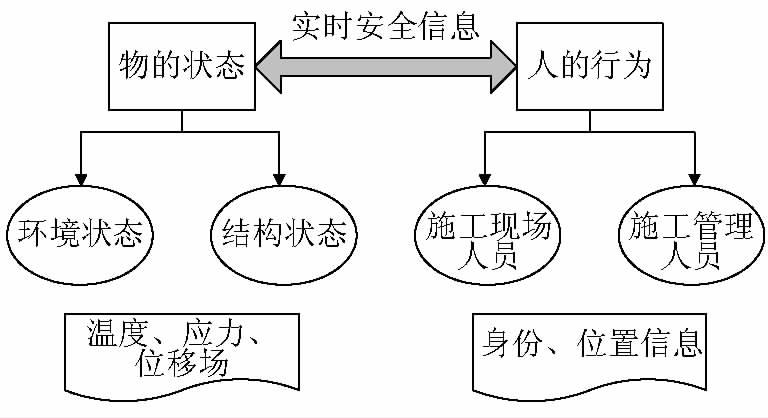
图13 安全知控一体化和实时化示意图
Fig. 13 Integration of real-time sensing and controlling
由于地下工程特别是长江隧道工程埋深大,距离长,且隧道内受盾构设备电磁环境干扰,因此,本项目采用基于无线传感网络(WSN)与射频识别(RFID)技术建立隧道人员实时定位系统。系统结构如图 14 所示。同时,为了提高现场施工人员的应急处置能力,提高安全信息的共享程度,开发了基于 Zigbee 和 WIFI 的深大隧道联络通道现场施工人员无线定位跟踪技术,用于高承压水下联络通道冻结施工的现场实时预警控制装置,各类预警信号可通过声、光及震动形式实时传输给施工作业人员,并启动相应的应急预案,如图 15 所示。
《图14》

图14 实时定位系统架构
Fig. 14 Architecture of real-time tracking system
《图15》
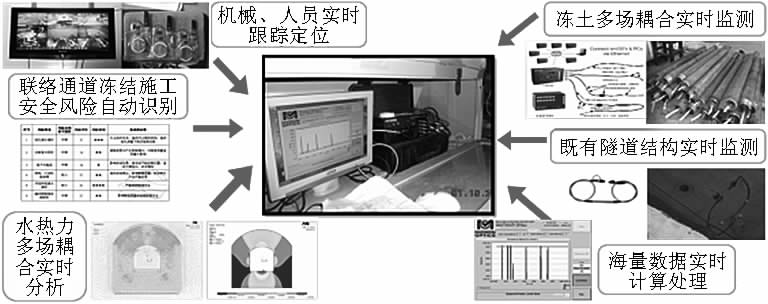
图15 越江联络通道冻结施工的现场实时预警控制装置
Fig. 15 Real-time safety control devices at construction site for cross passage construction in Yangtze riverbed metro
《6 结语》
6 结语
1) 地铁施工安全控制是贯穿工程建设整个周期的复杂控制过程,建立包括施工前期的安全风险自动识别、施工中风险时空演化耦合分析与预警、高承压水与超近距离穿越条件下特殊区段的施工安全控制技术体系,是防范和减少风险事故发生的重要措施和手段。
2) 地铁施工过程中产生大量的安全信息,有效的安全控制必须在对这些安全信息的充分、及时掌握条件下进行。因此,数据融合、BIM、物联网等现代前沿信息技术的应用是提升地铁工程施工安全控制水平重要的途径之一,它有利于提高地铁施工过程中安全信息的采集、传输、分析和挖掘能力,降低施工安全风险。
3) 地铁施工安全控制应以预防为主,在“人”和“技术”的结合上下功夫。一是对专家的个人经验、知识的显性化,研发面向安全控制应用层面的专家系统,有利于行业安全知识的积累、重用和共享;二是施工过程中将物的安全状态和人的安全行为无缝集成,从而实现安全知控一体化和实时化,提高施工人员的安全意识和水平,保障施工安全。
本研究成果分别在武汉、上海、深圳、沈阳等 9 条地铁线中逾百个施工项目部成功应用。











 京公网安备 11010502051620号
京公网安备 11010502051620号




