《1 Introduction》
1 Introduction
As an example of modern integrated naval warfare, the underwater attack-defense confrontation system refers to the formation of an organic whole for the implementation of underwater attack-defense combat missions by the integrated use of detection, command and control, attack, safeguarding, and other operational elements in crossdomain combat units in accordance with unified deployment.
It is not only a dynamic and open complex network system but also an orderly collection of operational resources relevant to the whole process of underwater battlefield detection and perception, information transmission, command and control, decision-making and engagement, comprehensive evaluation, etc. The subsystems within this system interact with and complement each other in terms of function and performance [1].
The underwater attack-defense confrontation system possesses the following main characteristics. 1) High concealment for warfare. A nuclear-powered submarine that is well concealed and highly maneuverable is able to cruise in important sea areas around the core economic zone of the opposition. Detection in an offshore environment is often more difficult than in open sea because the former shows complexity. 2) Enormous destructive ability. A strategic nuclear-powered submarine carries several strategic ballistic missiles with great deterrent power; a tactical nuclear-powered submarine might carry a number of long-range attack weapons for the implementation of precise and high-intensity attack. For example, many overseas operations have seen military powers launching sudden attacks led by underwater combat platforms. 3) Systematization. Military powers have proposed the theory of network-centric warfare, in which the various combat units of the cross-domain battlefield are connected through the network so that decentralized armed forces can jointly perceive the battlefield situation, further enhance the information advantage, and form a concept of systematic warfare [2]. The coordinated operational capability of cross-domain combat is tested by actual combat and training, thus highlighting and amplifying the combat effectiveness of underwater confrontation. The twenty-first century has seen the strengthening of the investigation and collection of comprehensive underwater data in important sea areas in a bid to guarantee the transparency of the underwater battlefield and enhance the capability of underwater combat.
It can be foreseen that future naval warfare will no longer be a confrontation between weapons and platforms, but will transform into a confrontation between systems, indicating that the underwater confrontation mode relying solely on the platform will gradually lose competitiveness [3,4]. Relevant countries are recommended to make comprehensive use of cross-domain, multidimensional, and multi-node resources so as to establish an underwater attack-defense force system that is capable of both offensive and defensive operations with cooperative coordination, presenting a new pattern of “information-led, system-based confrontation and resource sharing” [5-7]. In consideration of the complexity of research on the underwater confrontation system, as well as the long and costly simulation period of underwater experiments, many simulation methods for underwater confrontation are used to carry out targeted research [8,9]. By establishing kinematic and acoustic digital models of various types of attack and defense equipment for both sides and inverting the real marine environment, computer simulation technology is employed to build underwater confrontation simulation and effectiveness evaluation systems [10–12].
The theoretical achievements of the underwater attack-defense confrontation system are directly related to the effectiveness of simulation research. The reason is that simulation modeling needs to be based on the virtual battlefield environment and conform to differences between the actual sea area of combat, the combat units of both sides, and the combat missions, thus achieving a targeted configuration of the elements of the confrontation system, such as manned/unmanned equipment, fixed nodes, and infrastructure. However, few prospective studies exist on the composition and future development of a relevant system, which does not suffice for the accurate construction of an underwater attack-defense confrontation simulation on which this paper focuses. Based on the status quo of the construction of underwater confrontation systems by military powers, this paper explores the equipment composition and typical combat styles of future underwater attack-defense confrontation systems, with a view to promoting academic research on the system, and proposes some suggestions for development in this field in China.
《2 Status quo of construction》
2 Status quo of construction
The research and construction of underwater attack-defense confrontation systems is highly valued and actively conducted by the world’s major sea powers.
The U.S. Navy has actively practiced the concept innovation of underwater warfare, and issued a guidance document in 2016 called Undersea Warfare Science & Technology Objectives, in which the science and technology objectives in ten key fields were proposed, with a view to significantly improving the battlefield situation capabilities of underwater forces, thus ensuring that an underwater combat platform initially has the ability of systematic attackdefense confrontation and network operation. The underwater combat system of the U.S. military mainly consists of systems for underwater warning and surveillance, command and communication, attack and defense combat, and comprehensive security, etc. (1) The underwater warning and surveillance system includes, among others, underwater sound, space, electromagnetic, and aerial surveillances; (2) the command and communication system includes sound communication that is mainly used underwater, and blue-green laser communication that may be adopted in the future; (3) the attack and defense combat system includes underwater forces and air, surface, and shore-based anti-submarine forces; (4) the comprehensive security system includes marine geo-environment, hydrometeorology, and engineering construction, as well as search and rescue, navigation and positioning, and basic data construction security. The underwater attack-defense confrontation system of the United States, based on a new long-range sensing platform (such as the marine surveillance vessel) and a new generation of underwater communication system, strengthens the underwater attack-defense confrontation network and adds to the underwater multidimensional attack and defense confrontation equipment, which is gradually developing toward an unmanned and intelligent direction.
In recent years, the Russian navy has gradually resumed its underwater combat capability, which is realized mainly through submarine combat capability enjoying the traditional advantages of the current surface, underwater, space, and onshore multidimensional unified information space system that was initially constructed. The integrated information network helps to shorten decision-making time and improve the effectiveness of instruction delivery, while possessing certain anti-interference capability at the same time, which is mainly composed of: a sonar “dialogue” communication system, underwater high-speed Internet network, the underwater “GLONASS” navigation system, and the “Harmony” maritime surveillance system. In terms of confrontation measures, it not only possesses various types of hull and submarine sonar but has also mastered non-acoustic anti-sonar detection technology and the anti-attack sonar destruction system; and has the capability to use bubble shell for underwater sound wave shielding.
Germany, the United Kingdom (UK), France, Japan, and other countries have established relatively independent naval equipment systems, which generally have advanced electronic information combat capabilities as well as strong sea control operations capabilities. Among them, the conventional submarine manufacturing technology in Germany has reached world-class level, while both UK and France possess an independent nuclear deterrent capability, and Japan has built a well-established anti-submarine and anti-mine equipment system.
《3 Equipment composition and typical combat style》
3 Equipment composition and typical combat style
《3.1 Equipment composition》
3.1 Equipment composition
Underwater attack-defense confrontation has the following basic process: the attacker first discovers and identifies the defender and then carries out an attack according to the attack strategy instructed or preset by the superior command personnel after tracking and confirming the target’s information; the defender implements a defense after it discovers an attacker or sonar raises the alarm; this round continues until either the attacker loses its attack capability, such as the exhaustion of ammunition, sinking, or successful escape of the defender.
To effectively conduct the above confrontation missions, six aspects of capabilities are involved: (1) scout and warning capability; various fixed and mobile means for scout and warning are adopted comprehensively to discover, track, identify, and report underwater threat targets, as well as provide intelligence about the underwater target in a timely and accurate manner; (2) command and control capability, which means the establishment of a command network and control system with the simultaneous use of multiple means, closely-connected nodes, fast information transmission, efficient assistance in decision-making, and wide covering range; (3) covert defense penetration and attack capability, that is, by improving the comprehensive stealth performance of the underwater platform, advanced underwater weapons can pose an effective threat to an enemy’s carrier strike group, port base, and other important targets; (4) underwater defense capability; various means against submarine, mine, and underwater special operations are used to eliminate the underwater threat reliably and in a timely manner; (5) underwater information operation capability, that is, information countermeasures against the submarine and underwater weapons of the enemy are implemented to interfere, deceive, suppress, and destroy their underwater warning and network information systems; (6) comprehensive support ability, that is, achieve full-time environmental measurement and monitoring of globally important sea areas, while aviation and positioning accuracy, and characteristic data of underwater targets meet the requirements for long-time underwater navigation and the use of weapons, enjoying a capability of submarine rescue and life-saving in deep and high seas.
In terms of the above underwater attack-defense confrontation process and the required capabilities, the corresponding equipment for underwater attack-defense confrontation systems is mainly composed of mobile and fixed equipment, and infrastructure (Fig. 1). These three types of equipment transmit information through the information assurance network, which is under the unified command and control of the whole attack and defense system [13].
《Fig. 1》

Fig. 1. Equipment composition of an underwater attack-defense confrontation system.
3.1.1 Mobile equipment
Mobile equipment is divided into manned equipment and unmanned equipment.
(1) Manned equipment
Manned equipment mainly includes anti-submarine surface ships and aircraft, and submarines, etc., functioning as the overall reconnaissance and early warning, command and decision-making, force delivery, fire strike, etc. of the underwater attack-defense system, and can also provide energy for unmanned equipment. Manned equipment is not only the command center of underwater attack-defense system but also a large-scale comprehensive combat device integrating fire strike, strategic deterrence, and force delivery.
(2) Unmanned equipment
Unmanned equipment mainly includes unmanned surface boats (USV), and unmanned underwater equipment and weapons, focusing on intelligence surveillance/reconnaissance, tracking, anti-submarine, anti-mine, covert strike, and other tasks.
Typical platforms include USV, unmanned underwater vehicles (UUV), underwater glider, submarine-launched unmanned aerial vehicle (UAV), etc. USVs have the advantage of sturdy endurance and easy independent deployment, mainly used for anti-submarine surveillance patrols and environmental data collection; UUVs have the advantages of strong concealment and autonomous control. Underwater gliders are mainly engaged in covert detection and reconnaissance missions in marine battlefields taking advantage of green energy which, although capable of long-range voyage in theory are, in fact, very slow. Submarine-launched UAVs can independently carry out reconnaissance, tracking, relay guidance, communication relay, electronic jamming, and other tasks to provide wartime information support for ships in the region.
Underwater weapons refer to all kinds of weapons launched and controlled underwater, including torpedoes, mines, depth charges, underwater launched missiles and decoys, and frogman transport boats. Underwater weapons not only provide diversified underwater strike methods but are also effective means to deceive opponents, forming basic support for underwater special operations.
3.1.2 Fixed equipment
Fixed equipment mainly refers to underwater preset weapon systems, which are generally deployed in key sea areas in advance and stand by at the seabed for a long period to be woken up in wartime to strike enemy ships with missiles or torpedoes. It is divided into two types: deep sea and shallow sea equipment.
(1) Deep sea preset weapon system
As a typical deep sea preset weapon system, the United States’ “floating payload” is preset in deep sea and consists of vehicles, payloads, and communication subsystems, etc. Through the deployment of surface ships, it can stand by for five years at a depth of four km under water. After long-range wake-up, the missile is quickly launched, the UAV is released, or the sensor is deployed according to the target indication information (whichever is suitable for battlefield information support and ambush missions).
(2) Shallow sea preset weapon system
A typical shallow sea preset weapon system is the American “Hydra,” which is preset in the offshore and is launched by surface ships, submarines, and aircraft, among other platforms. It is equipped with several small unmanned aerial and underwater vehicles and can lurk continuously for 6–12 months in the sea area with a water depth of less than 300 m, passively receive commands, control, and intelligence information, and independently command the combat payload to carry out anti-submarine missions after being activated.
3.1.3 Infrastructure
Through the construction of underwater infrastructure, a long-term fixed underwater alert capability can be formed for offshore straits, key junctions, and strategic sea areas. The infrastructure includes an underwater monitoring network, underwater acoustic communication network, underwater navigation network, buoy and submerged buoy network, and underwater charging station. The underwater monitoring network system connects underwater monitors in a series using cables to form a detection array to perform underwater early warning and intelligence gathering tasks. The underwater acoustic communication network is used to solve the problem of underwater high-bandwidth communication and provide wartime information support for underwater equipment. The underwater navigation network provides accurate navigation and positioning support through underwater beacons. The buoy and submerged buoy network provides environmental information on water and underwater in the sea area and can be used as relay nodes for navigation and communication. The underwater charging station provides energy for underwater equipment such as unmanned underwater vehicles.
《3.2 Typical combat style》
3.2 Typical combat style
3.2.1. Air-sea joint manned/unmanned cooperative operations
In 2015, the U.S. think tank research report The Emerging Era in Undersea Warfare noted that the underwater warfare style has changed to a submarine-unmanned platform system, and submarines need to change from frontier tactical platforms similar to aircraft, to cooperative platforms similar to aircraft carriers, in order to actively explore the integration of various combat resources such as space satellites, airplanes, surface ships, and underwater arrays, and coordinate global, multidimensional, and numerous anti-submarine sensors to generate accurate and real-time battlefield situation maps. It is clear that future underwater attack-defense confrontation systems will have integrated and networked cooperative underwater combat command and control capabilities to quickly and effectively organize and execute various underwater combat missions through submarine platforms, and then organically combine various combat platforms and information nodes by using underwater acoustic data links. Through the establishment of underwater information advantages, situational awareness and high sharing are realized in an underwater battlefield to quickly act before the enemy does and command troop operations, carry out joint underwater strike missions, and block enemy submarines from entering and leaving waterways.
Typical underwater operations in the future can be expressed as follows (Fig. 2): (1) Execute strategic prediction by means of satellites for ocean surveillance, electronic reconnaissance, and remote sensing, analyze the deployment of underwater forces such as submarines, and study and judge possible follow-up actions; (2) adopt underwater surveillance systems, ocean surveillance ships and other means to conduct campaign reconnaissance, and obtain the regions and directions of enemy underwater platforms across a large range; (3) use anti-submarine aircraft to search potential regions and directions, and identify and locate suspicious targets by sonobuoys and other means; (4) use anti-submarine aircraft or other anti-submarine means to track or attack. This operation contains a systematic idea of cooperative operations and relevant equipment will be deployed in key sea areas and major straits and waterways around the world.
《Fig. 2》
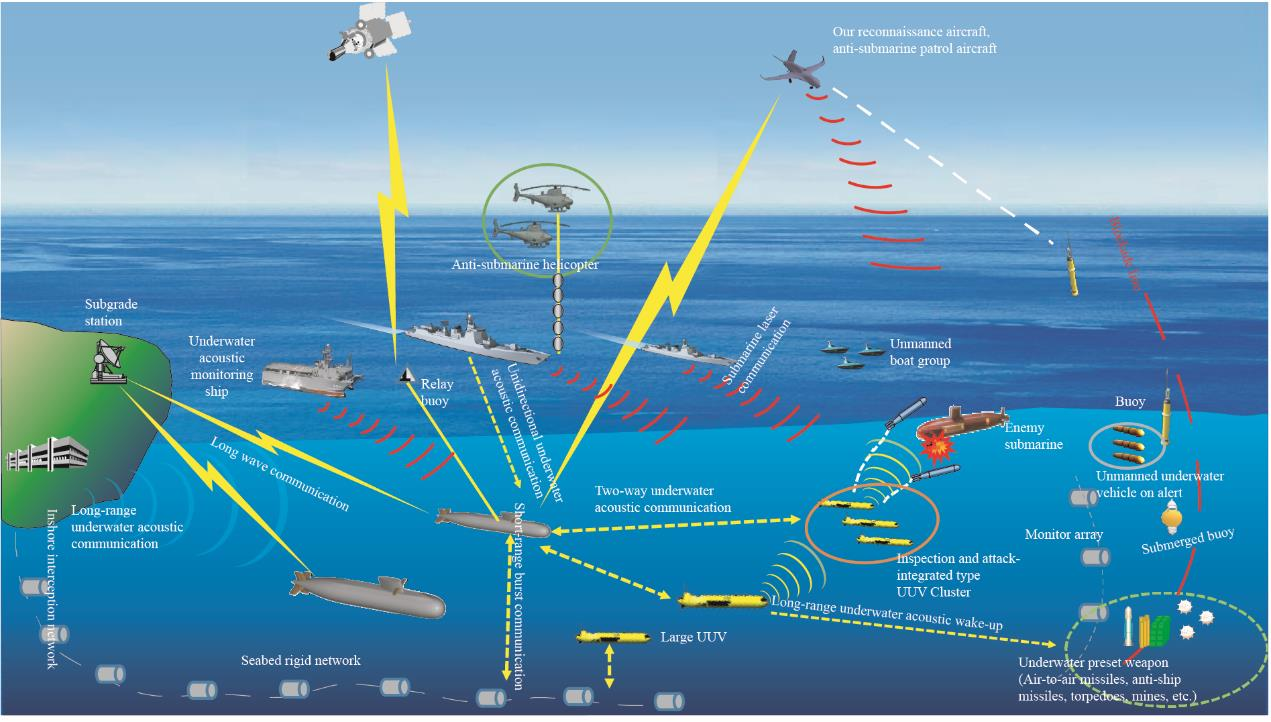
Fig. 2. Schematic diagram of typical underwater operations in the future.
In the above-mentioned cooperative operations, manned platforms such as submarines mainly undertake operational command tasks. Unmanned systems are not only able to provide continuous reconnaissance and detection but also provide accurate and timely direct/indirect firepower. Accordingly, two typical underwater confrontation scenarios are proposed.
(1) Manned/unmanned cooperative underwater area control
A number of UUVs form a network by self-organizing a search in the established sea area according to the preplanned route, and continuously detect and track underwater targets in the monitoring area. The UUV group relays the target information back to the manned platform, which issues attack instructions to the UUV group after making decisions, evaluates the strike effect, and judges whether to order a second strike. This forms a closed-loop “reconnaissance–strike–evaluation” underwater area control link and constructs a new joint offensive anti-submarine system in maritime traffic arteries or key sea areas. In addition, the defensive anti-submarine capability of the formation is significantly strengthened by placing large unmanned surface boats equipped with low-frequency active sonar and mobile detection networks around its own fleet.
(2) Anti-aircraft carrier formation of underwater preset system
The underwater preset system is deployed in key sea areas in advance and lurks for a long period before being woken up remotely in wartime. After judging that the enemy aircraft carrier formation has entered the range of the underwater preset platform cluster weapon, the rear command boat sends a strike command with target indication information to the underwater preset system. The underwater preset system responds by launching the first round of torpedo or missile attacks on the enemy aircraft carrier formation. Then, depending on the effect of the attack, the command boat, far away from the danger zone, chooses whether to approach the enemy aircraft carrier formation to launch a second attack.
3.2.2 Underwater unmanned cluster operations
A single unmanned underwater combat unit is not competent for a variety of complex combat missions, and therefore unmanned underwater equipment is developing toward unmanned cluster combat. Looking at relevant research of the U.S. navy as an example: (1) In 2006, cruise missile nuclear submarines were used to transport unmanned systems and construct an offshore continuous surveillance network (PlusNet) with a surveillance range of 3.4×104 km2 through the mutual communication of many UUV nodes; (2) In 2011, the U.S. Navy purchased more than 300 gliders, which can undertake various tasks such as marine environment monitoring, underwater moving target tracking and monitoring, underwater intelligence collection, and key sea area data acquisition in offshore waters with a water depth of 10–1000m. (3) In 2016, the U.S. Defense Advanced Research Projects Agency (DARPA) launched combat style innovation projects that are three-dimensional, unmanned, and distributed, integrating a variety of scattered and independent unmanned cluster new concept equipment (Fig. 3) to form a new concept of naval warfare systems oriented to the intelligent era; (4) In 2017, the first unit of the U.S. Navy’s unmanned underwater combat system was formally established. (5) Boeing’s “Echo-Voyager” UUV (80-ton class) has a dive depth of more than 3000 m and a range of 12 000 km; it can start from Guam formation and work in the South China Sea region for several months.
《Fig. 3》

Fig. 3. Composition of U.S. DARPA underwater warfare system innovation project.
The typical unmanned underwater cluster warfare mode in the future is described as follows: after increasing numbers of UUV are launched, they form an underwater cluster and sail under cover to a designated area for cruise search; the underwater monitoring network formed by UUV clusters can then search and detect underwater sensitive targets in 8.57×105 km2 area within four hours, and detect targets tens of kilometers away and carry out multi-node relay tracking. After detecting a target, it communicates with the decision maker and, on receiving the attack order, effects coordinated autonomous attacks by adopting “wolf pack tactics” to carry out concentrated fire attacks on high-value targets such as aircraft carrier formations.
《3.3 Key technologies involved》
3.3 Key technologies involved
The key technologies that need to be developed to improve the capability of an underwater attack-defense confrontation system can be divided into four categories according to professional fields.
(1) The relevant technologies of attack and defense system mainly include key technologies in the field of system engineering research such as underwater attack-defense confrontation test systems, combat system effectiveness, system modeling and simulation deduction, battlefield environment system construction, and adaptive networking.
(2) Equipment platform technology mainly includes various submarine-related technologies, such as design, deep dive, stealth, power plant, and propeller technologies. There are also key technologies such as the overall design and wake-up launch of underwater preset weapon systems, cooperative operation of unmanned underwater platforms, recovery, and deployment.
(3) Weapon technology mainly involves underwater attack-defense weapons such as torpedoes, mines, missiles, and underwater acoustic confrontation equipment. Its key technologies are related to navigation control, guidance, energy power, deployment, launching, etc.
(4) Information technology mainly involves key technologies such as underwater early warning and detection, command and control, communication, and navigation.
《4 Analysis of development direction of system equipment》
4 Analysis of development direction of system equipment
The rise of a new wave of military revolution with information technology as its core has provided opportunities and impetus for the innovative development of naval equipment. The future development of unmanned underwater systems has been discussed and studied [14]. This paper focused on the analysis of the development of underwater attack-defense confrontation system equipment. The key to improving combat capability in the future lies in the acquisition of information. Therefore, improving the overall situational awareness capability of the confrontation system and the interconnection capability between equipment will become an important construction direction of the navy in the future. It involves three aspects: to develop situational awareness to a large-scale battlefield and cooperative combat capability, to develop the cooperative detection, communication, command and control, and electronic warfare capabilities among small-scale platforms, and to research underwater information technology and construct underwater information networks. To achieve the above-mentioned capability improvement, key construction should be carried out in the following equipment development directions.
《4.1 Priority to development of unmanned platforms》
4.1 Priority to development of unmanned platforms
Unmanned combat platforms will be an important element in naval weapons and equipment and become power multipliers in future battlefields. In recent years, in the new round of naval force structure evaluation of military powers, unmanned surface boats and super-large UUV have been included for the first time, highlighting the importance of large unmanned surface/underwater platforms. The accelerated deployment of a variety of unmanned systems will become the support that changes the combat style of underwater attack-defense confrontation.
4.1.1 Anti-mine and unmanned underwater vehicles for reconnaissance are the focus of development
Unmanned submarine vehicles have the characteristics of small targets, great concealment, and continuous task execution, and are extremely suited for detecting and attacking ships, submarines, and various other tasks. Countries worldwide are actively studying the joint application of UUV in the networked underwater detection and antisubmarine fields. In 2011, DARPA proposed the concept of “Distributed Agile Submarine Hunting” (DASH) and completed the development of the system prototype in 2017. DASH pioneered the “bottom–up” submarine detection mode, using dozens of UUV to form a network, and monitoring the upper sea area by active sonar from a water depth of 6000 m, so as to avoid the influence of sound scattering from the sea surface and seabed, and to find enemy submarines in the designated sea area in a timely and reliable manner. The “Bluefin Tuna-12” UUV developed by General Dynamics has been put into use and equipped with intelligent autonomous algorithms to transmit missioncritical data and perform diversified tasks. The “Saury” Surface Mine Countermeasure (SMCM) UUV, which has entered the stage of small batch production, is used to independently discover and identify mines in a complex seabed environment and has become key equipment in the anti-mine task package.
4.1.2 UAV turns into important battlefield reconnaissance equipment
The underwater attack-defense equipment system consists of multidimensional equipment systems such as space, air, water surface, underwater, and seabed. Special aircraft are an important device for battlefield information acquisition, for example, anti-submarine aircraft are the most effective equipment type in anti-submarine warfare, with the advantages of fast response speed, wide control range, multiple attack modes, and flexibility. Military powers pay special attention to the performance improvement and application innovation of shipborne UAVs. Through the adoption of new concepts, materials, and technologies, the intelligence, stealth, maneuverability, air stagnation, and all-weather flight capability of UAVs are all comprehensively strengthened.
The U.S. Navy focuses on developing cutting-edge technologies such as intelligent command and control systems, combat weapons, and stealth methods, aerial refueling, and solar power of shipborne UAVs. For example: (1) Improve the level of single-machine flight intelligence and multi-machine cooperative intelligence by applying new technologies such as in-depth learning, search and pattern recognition, data mining, and natural language processing in the direction of artificial intelligence; (2) improve the autonomous intelligence of missions for UAVs through the development of all-weather, high-resolution, long-distance, real-time, and miniaturized mission equipment; and (3) improve the stealth of UAVs and effectively avoid detection through breakthroughs in multi-band stealth, radiation, and bandwidth management technologies. UAVs such as X-47A, “Fire Scout”, and “Submarine-Deep Sea Ghost,” among other shipborne vehicles, have successively completed their development and test flights, leading the development trend in international UAVs.s
4.1.3 Unmanned combat ships with multiple styles and intelligent autonomy
The endurance, speed, and displacement of early unmanned surface boats has generally been limited. In order to further improve the operational performance of unmanned surface boats and meet the navy’s operational requirements for long-term continuous anti-submarine warfare, DARPA began to study anti-submarine continuous tracking unmanned boats (ACTUV) in 2010. These have a boat speed of up to 50 km/h, a maximum cruising range of over 18000 km, and a full load weight of around 140 t. The vehicle can cruise autonomously for 2–3 months under the condition of unmanned driving and remote control, can be continuously operated in Level 5 sea conditions, and ensure navigation and survival in Level 7 sea conditions. The United States also plans to develop ultra-high-speed unmanned surface boats with speeds as high as 100–120 n mile/h. The unmanned surface boat to be deployed in Britain is equipped with the autonomous anti-submarine surveillance system (SeaDrix), which has independent mission planning, collision avoidance, sonar processing, and situational awareness subsystems, as well as integrated communication and coordination capabilities with unmanned platforms. The relevant concepts and equipment fully reflect the intelligent development direction of unmanned combat ships.
《4.2 Multifunctional equipment platform》
4.2 Multifunctional equipment platform
Due to the increasing complexity of future combat missions, equipment development has shifted from focusing on specific single uses to multifunctions and many uses. Discrete weapon systems form a large system, which enables the combat platform to have multiple combat functions and adapt to different combat missions. For example, the development of surface ship technology has given birth to a variety of power delivery aircraft carriers and advanced multifunctional missile warships. Future aircraft carriers can carry a variety of types of weapons which operate in the air, on the surface, and under the water, integrating a number of combat capabilities and performing an assortment of tasks.
The trend of multi-purpose weapon systems is obvious. The common missile compartment (CMC) is an application innovation of the “Columbia” class ballistic missile nuclear submarine in the United States. It adopts modular design, integrates the missile’s transportation, storage, launching, power supply, cooling, air conditioning, control, and other components, and can adapt to different types of warheads such as ballistic and cruise missiles. Each submarine is equipped with four CMCs, and each CMC launch module is equipped with four missile launch tubes (Fig. 4), with extremely high flexibility in operational load configuration.
The trend of multi-function of equipment platforms is more obvious. As a modular and reconfigurable ship, the U.S. Navy littoral combat ship (LCS) has the capability of replacing task packages: it provides task packages for corresponding war zones according to different requirements and performs various tasks such as surface warfare, anti-submarine warfare, and anti-mine in offshore areas, respectively. LCS adopts an open system architecture design, equipped with modular weapon subsystems, sensor subsystems, and various manned/unmanned aerial vehicles, which are used to consolidate and expand control over coastal water surfaces and provide support for joint forces to enter key war zones.
《Fig. 4》

Fig. 4. Schematic diagram of common missile compartment design of a U.S. nuclear submarine.
《4.3 All-round stealth of equipment platforms》
4.3 All-round stealth of equipment platforms
The stealth performance of the underwater weapon equipment platform is extremely important as it is related to its own survivability and combat effectiveness. Modern reconnaissance and detection systems have adopted a variety of detection technologies and means according to the target characteristics of underwater equipment platforms. In order to achieve the ideal stealth effect, an underwater weapon platform must comprehensively use various stealth methods such as anti-sonar, anti-electric field, degaussing, bait, and active interference. For conventional power submarines, it is an effective method to improve the concealment of conventional submarines and has become the standard configuration for the overall design of new submarines without relying on the upgrading of air propulsion devices (AIP) and fuel cells, by reducing noise, improving efficiency, and developing toward the direction of full concealment navigation.
《5 Suggestions for field development》
5 Suggestions for field development
《5.1 Developing comprehensive perception and navigation capabilities in the direction of key battlefields are prerequisites for the construction of underwater attack-defense confrontation systems》
5.1 Developing comprehensive perception and navigation capabilities in the direction of key battlefields are prerequisites for the construction of underwater attack-defense confrontation systems
In order to comprehensively improve the perception capability of underwater, surface, and air in the whole space dimension, it is suggested that space reconnaissance should be taken as strategic early warning, the construction of underwater listening and measuring systems within a 200 m isobath should be strengthened, and unmanned marine early warning and detection systems should be developed. UUV networking, submarine optical fiber, buoys, submarine buoys, and other means to solve problems of underwater long-distance communication or surfaceunderwater cross-domain communication should be comprehensive adopted, and outboard multi-base detection technology used to realize underwater long-range detection.
Navigation and positioning capability is the basic requirement for implementing strategic/tactical operations in underwater battlefields. In oceangoing underwater military missions, it is vital to ensure operational efficiency and navigation safety. Both prior research and the current study have focused on underwater integrated navigation technology with inertial and acoustic navigation, and gravity, terrain, and geomagnetic matching as elements [15].
In the future, the new underwater navigation system can be combined with other underwater detection and sensing systems to build an underwater distributed sensing and navigation network, so that underwater equipment can “see further and more clearly” and significantly improve their own distributed precision combat and strategic counterattack capabilities.
《5.2 Developing an integrated command and control system for joint operations is an important factor in winning future underwater attack-defense system operations》
5.2 Developing an integrated command and control system for joint operations is an important factor in winning future underwater attack-defense system operations
On the basis of information transmission, we will develop the command and control capability for possible future combat areas in key directions, especially for underwater force operations. Based on the concept of DARPA’s “Tactical Submarine Network Architecture,” through a small number of surface buoys, a large number of submarine buoys, and thin optical fiber, power nodes and data communication capabilities will be distributed over a distance of hundreds of kilometers on the seabed with a depth of more than 3000 m, thus effectively breaking through the key technical system of submarine command and communication, exploring the establishment of a real-time, efficient, and large-capacity command and communication network, and comprehensively forming the integrated joint command and control capability of an underwater attack-defense confrontation system.











 京公网安备 11010502051620号
京公网安备 11010502051620号




