
2016年 第2卷 第2期
《工程(英文)》 >> 2016年 第2卷 第2期 doi: 10.1016/J.ENG.2016.02.010
智能城市(iCity) 中自动驾驶汽车工业的关键挑战——高清地图
a. International Management, Munich Business School, Munich 80687, Germany
b. UNITY Business Consulting (Shanghai) Co., Ltd., Shanghai 201203, China
下一篇 上一篇
摘要
本文对未来城市中自动驾驶的必要技术进行了深入的分析,从车载电脑运算、数据处理、路边基础设施和云解决方案等不同方面反映了科技的发展状况,主要对自动驾驶的核心技术——高清地图的应用所带来的挑战进行了描述。
关键词
自动驾驶 ; 交通基础设施 ; 智能城市(iCity) ; Car-to-X 通信系统 ; 汽车通信 ; 高清地图
图片

图1

图2
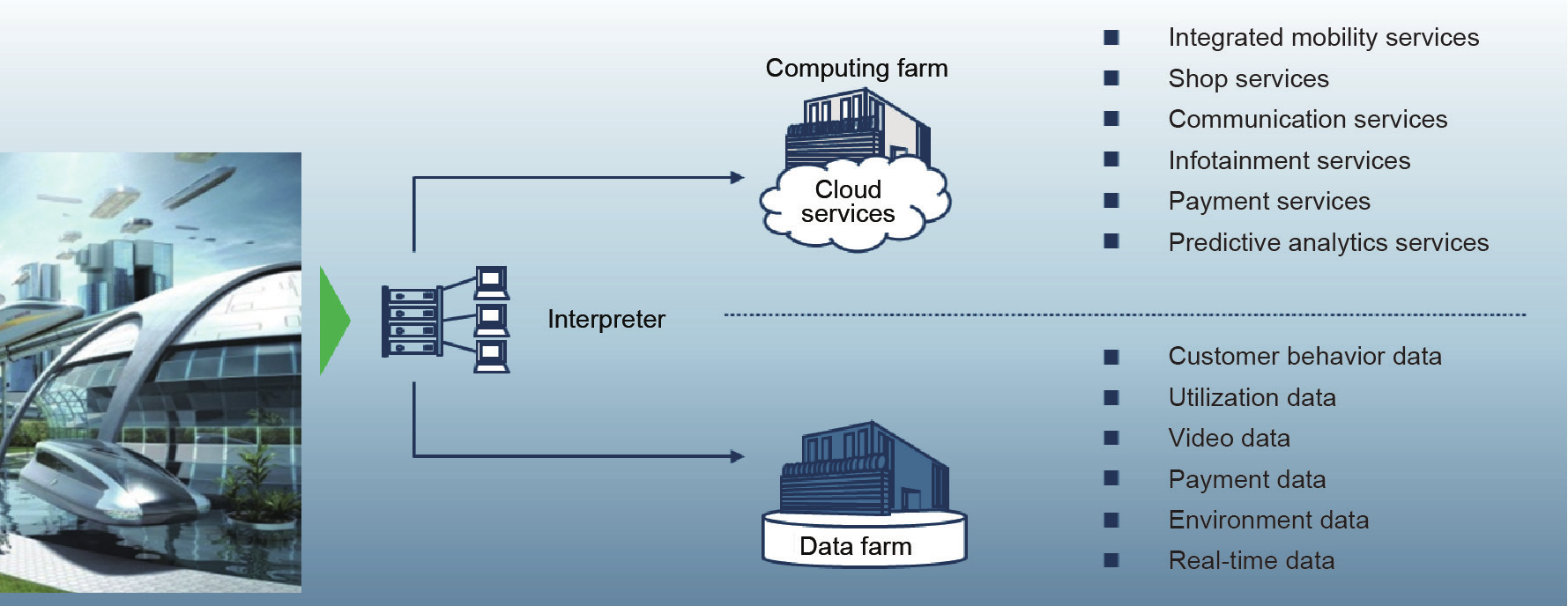
图3

图4
参考文献
[ 1 ] Stayton EL. Driverless dreams: technological narratives and the shape of the automated car. Cambridge: Massachusetts Institute of Technology; 2015.
[ 2 ] Redzic O, Rabel D. A location cloud for highly automated driving. In: Meyer G,?Beiker S, editors Road vehicle automation 2. Switzerland: Springer International Publishing; 2015. p. 49–60.
[ 3 ] Dokic J, Müller B, Meyer G. European roadmap: smart systems for automated driving. Berlin: European Technology Platform on Smart Systems Integration; 2015.
[ 4 ] Jakubiec G, Mullinix B. The use of LiDAR technology in autonomous cruise control systems for automobiles. Conference Session C10, Paper #3124; 2013.
[ 5 ]
LiDAR boosts brain power for self-driving cars.Earth Imaging J [Internet].
[ 6 ]
Buechel M, Frtunikj J, Becker K,?Sommer S, Buckl C, Armbruster M, An automated electric vehicle prototype showing new trends in automotive architectures. In: Proceedings of 2015 IEEE 18th International Conference on Intelligent Transportation Systems;
[ 7 ] Marks P. Quantum positioning system steps in when GPS fails. New Sci 2014;222(2969):19.
[ 8 ]
Kent L. HERE introduces HD maps for highly automated vehicle testing [Internet].
[ 9 ] Sirui S. Towards autonomous driving at the limit of friction [dissertation]. Waterloo: University of Waterloo; 2015.
[10] Aeberhard M, Rauch S, Bahram M, Tanzmeister G, Thomas J, Pilat Y, Experience, results and lessons learned from automated driving on Germany´s highways. IEEE Intel Transp Sy 2015;7(1):42–57.
[11]
Ghosh A, Vardhan V, Mapp G,?Gemikonakli O,?Loo J. Providing ubiquitous communication using road-side units in VANET systems: unveiling the challenges. In: Proceedings of the 13th International Conference on ITS Telecommunications (ITST);
[12] Liu J, Wan J, Wang Q, Deng P, Zhou K, Qian Y. A survey on position-based routing for vehicular ad hoc networks. Telecommun Syst 2016;62(1):15–30. 链接1
[13]
Seif H, Tao M. Industrial round table: Industrie 4.0 technologies and Internet of Things and services in the city of the future [presentation]. In: The 3rd Sino-German CAE/acatech iCity Symposium; 2014
[14]
Kaiwartya O, Kumar S. Geocasting in vehicular adhoc networks using particle swarm optimization. In: Proceedings of the International Conference on Information Systems and Design of Communication;
[15] Kehoe B, Patil S,?Abbeel P,?Goldberg K. A survey of research on cloud robotics and automation. IEEE Trans Autom Sci Eng 2015;12(2):398–409. 链接1
[16]
Seif H. Autonomous driving in the iCity-HD maps as a key challenge of the automotive industry [presentation]. In: The 4th Sino-German CAE/acatech iCity Symposium;
[17] Moreno FA, Gonzalez-Jimenez J, Blanco JL, Esteban A. An instrumented vehicle for efficient and accurate 3D mapping of roads. Comput-Aided Civ Inf 2013;28(6):403–19. 链接1
[18] O´Neill-Dunne J. Image boost: drones produce sharper images for mapping. Roads Bridges 2015;53(9):30–2.
[19]
Presskey.com [Internet].Grand Cayman: Name Administration Inc.;











 京公网安备 11010502051620号
京公网安备 11010502051620号




