2018年 第4卷 第3期
《工程(英文)》 >> 2018年 第4卷 第3期 doi: 10.1016/j.eng.2018.05.013
基于无人装备的地下金属矿智能开采技术
BGRIMM Technology Group, Beijing 100160, China
下一篇 上一篇
摘要
以矿产资源安全、高效和绿色开发为背景,介绍我国地下金属矿智能开采技术的现状及发展趋势。对地下金属矿智能开采技术的国内外研究现状进行了分析和总结,介绍了具有自主知识产权的地下无人采矿装备的最新技术进展,包括地下凿岩台车、地下潜孔钻机、地下铲运机、地下矿用汽车和地下装药车等五大装备的智能化及无人控制技术,对实现智能开采的三大基础平台,包括定位和导航平台、信息采集与通讯平台、生产过程调度与控制平台进行了分别介绍。最后利用上述无人装备和平台在凡口铅锌矿地下矿山进行了智能开采的工业试验,重点介绍了地下智能铲运机在通信系统、定位系统和信息采集系统的支持下,如何实现无人驾驶。试验证明智能开采技术切实可行,对促进我国采矿技术向智能化方向发展、增强我国矿业行业的核心竞争能力有巨大的推动作用。
图片

图1
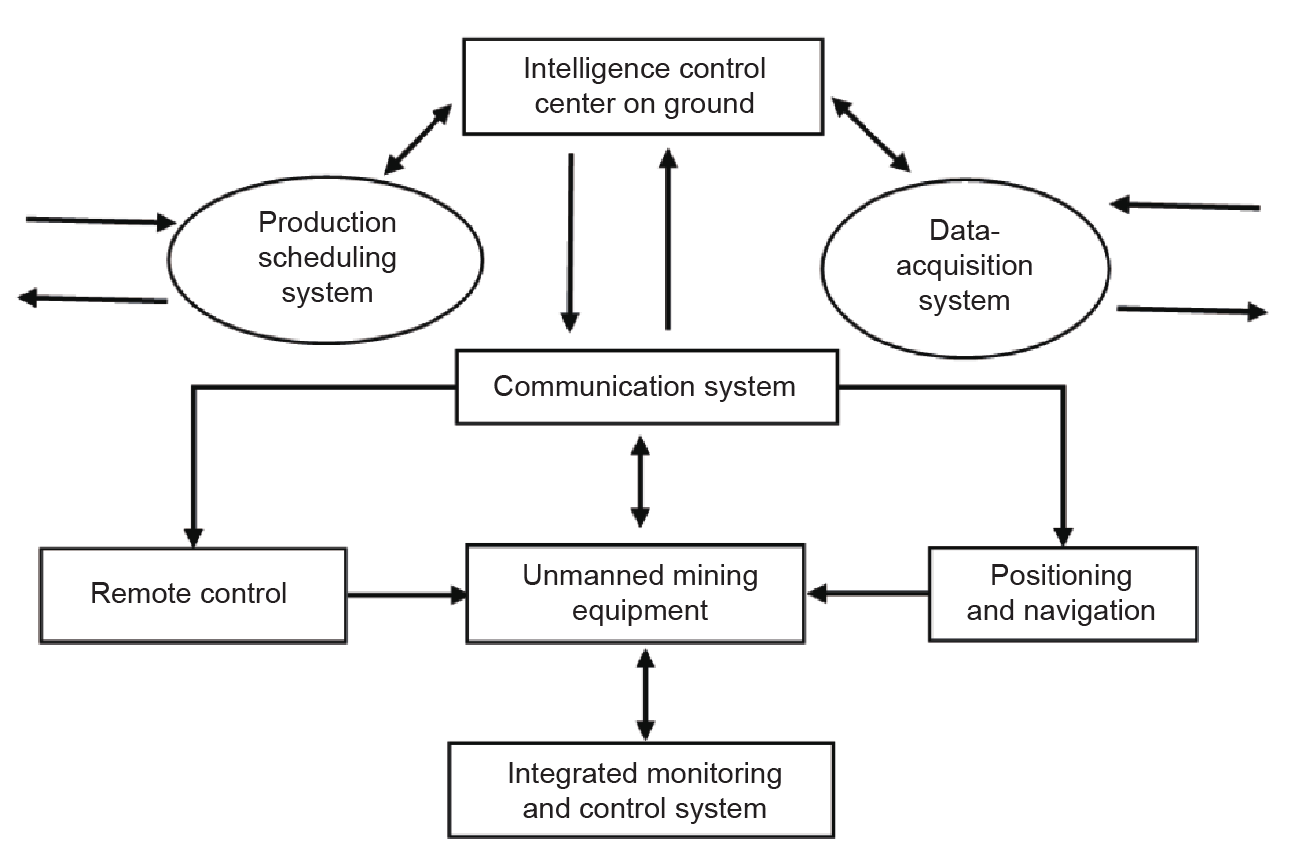
图2
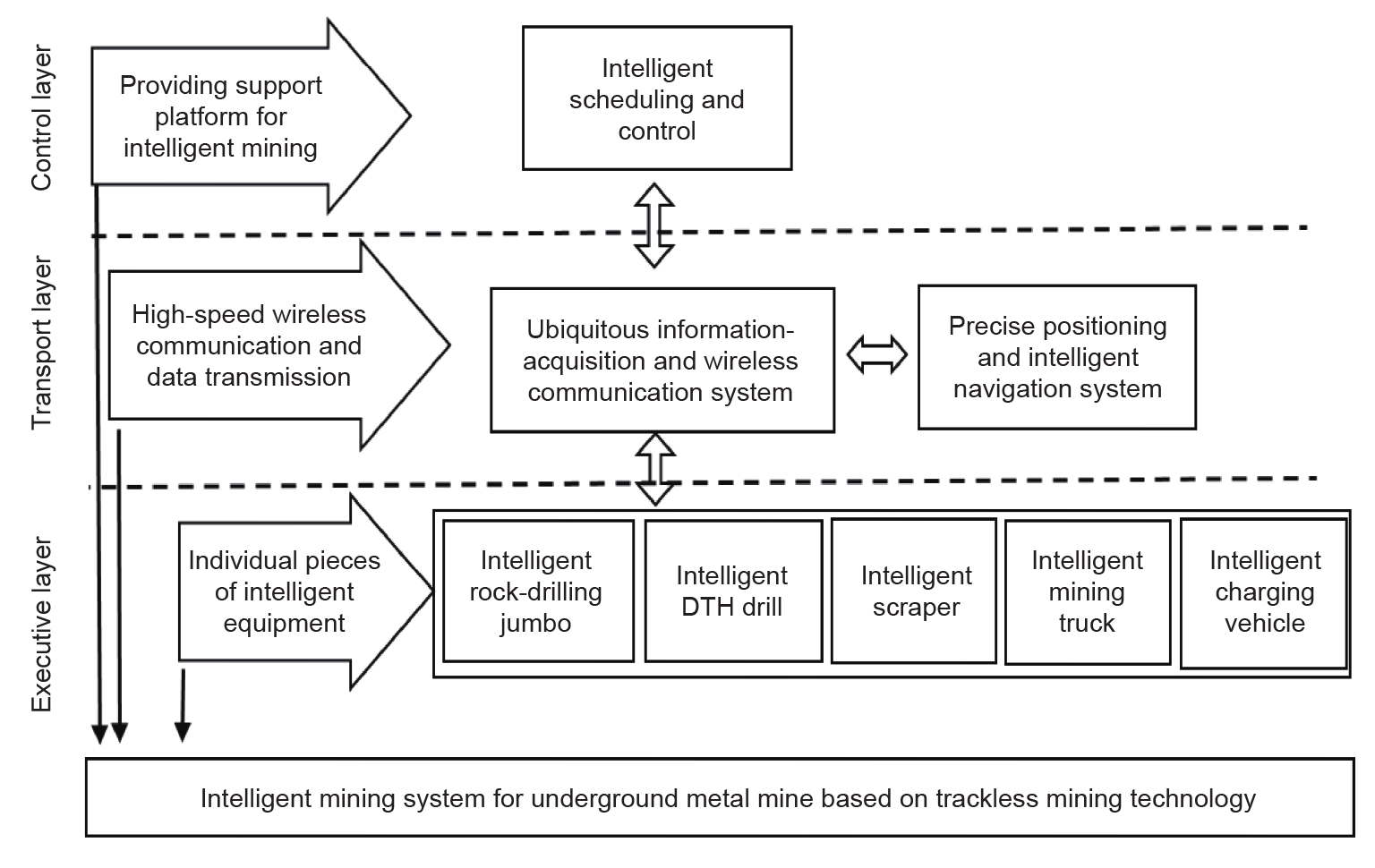
图3

图4
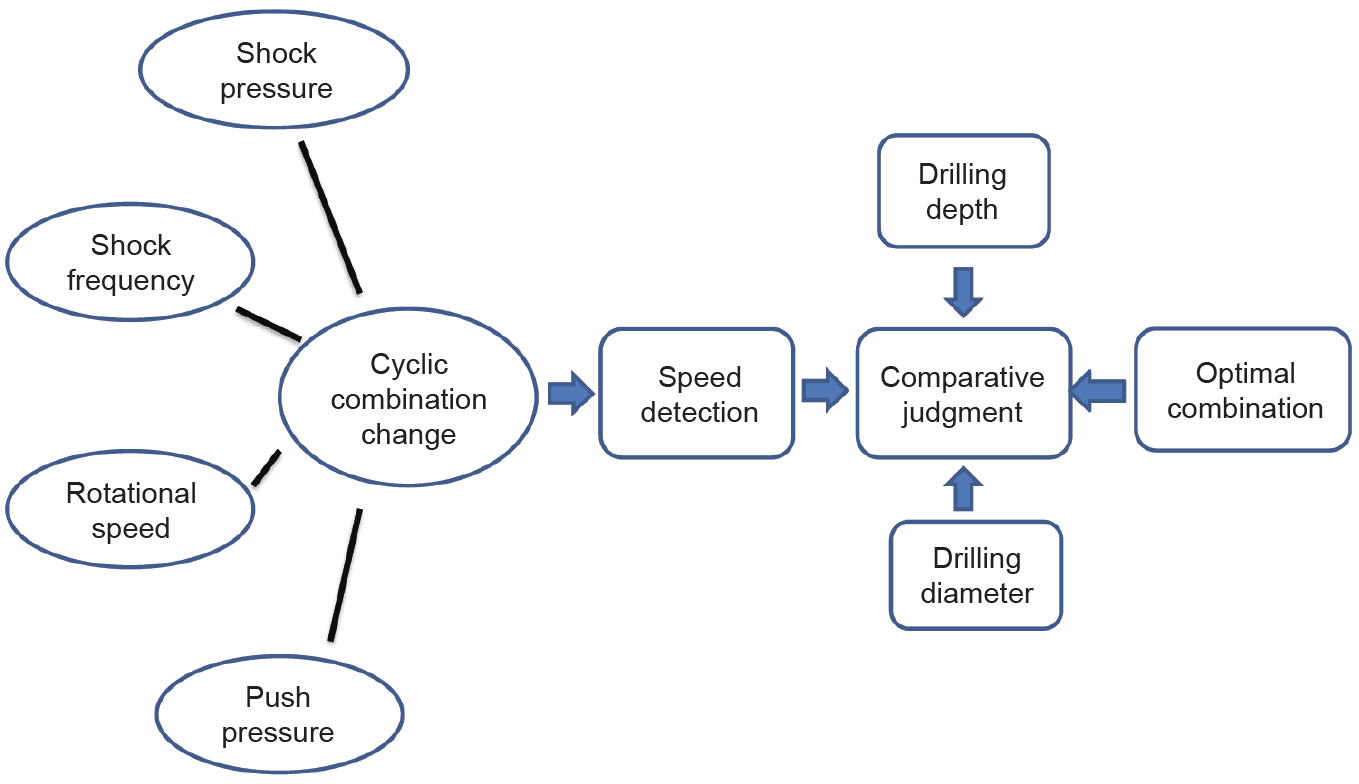
图5

图6
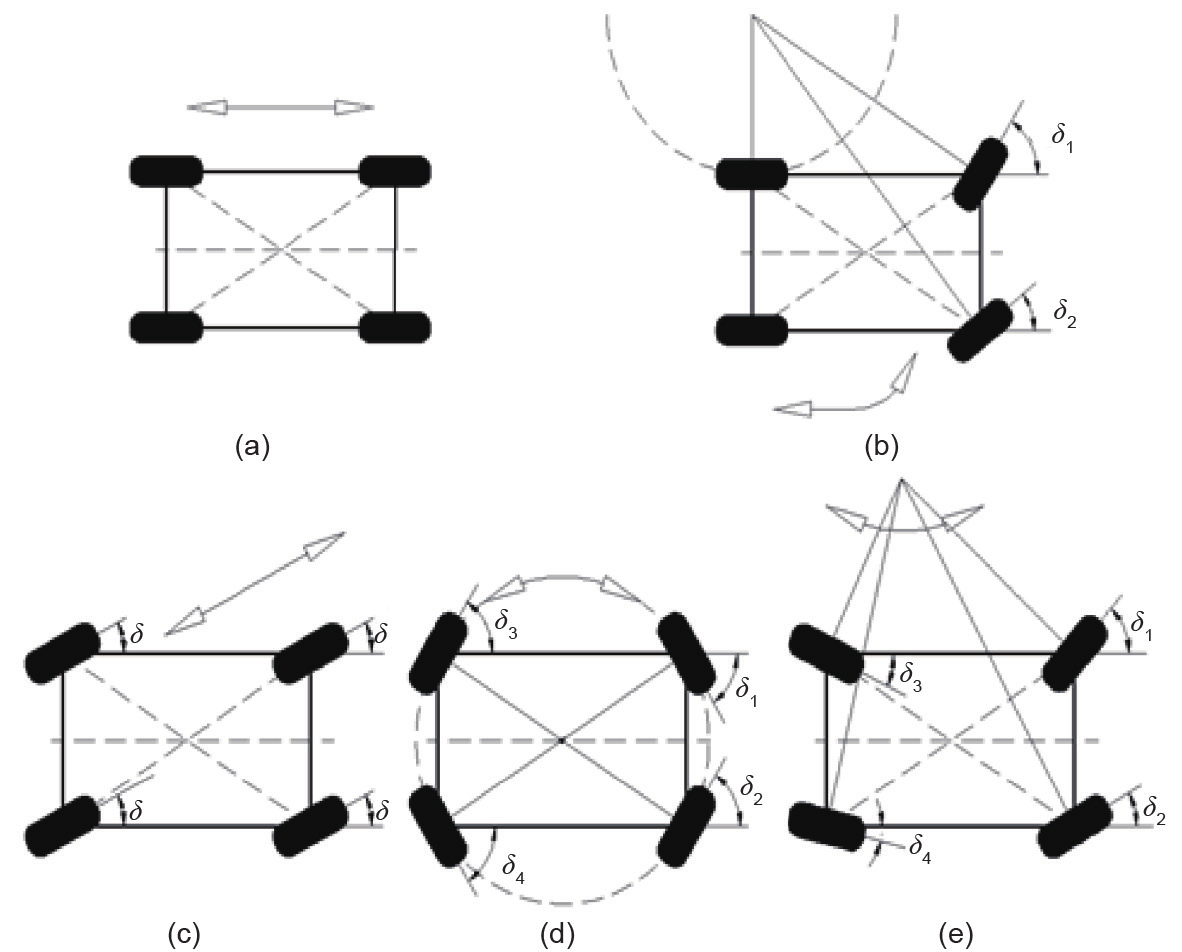
图7

图8

图9
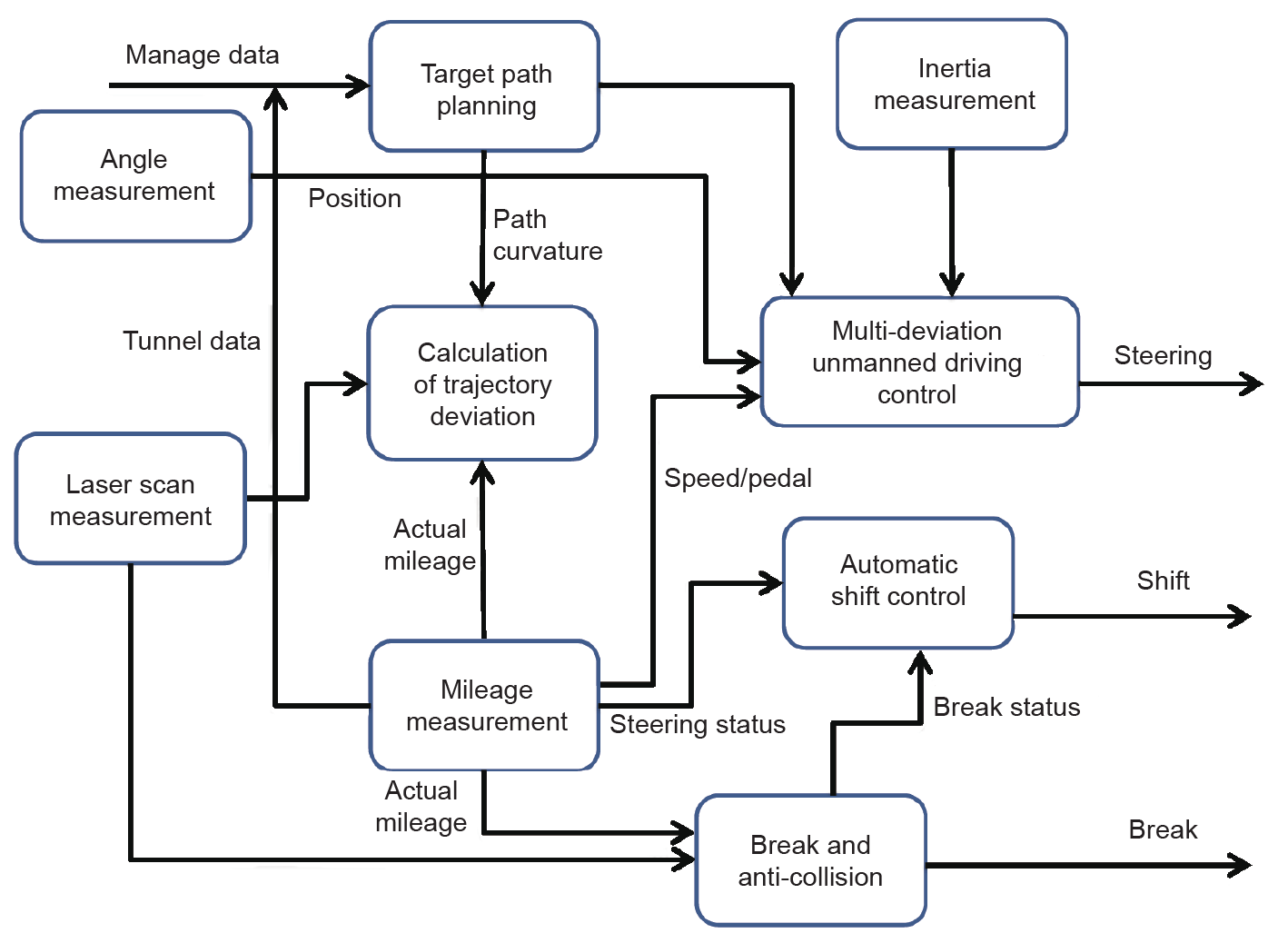
图10

图11

图12

图13

图14

图15

图16
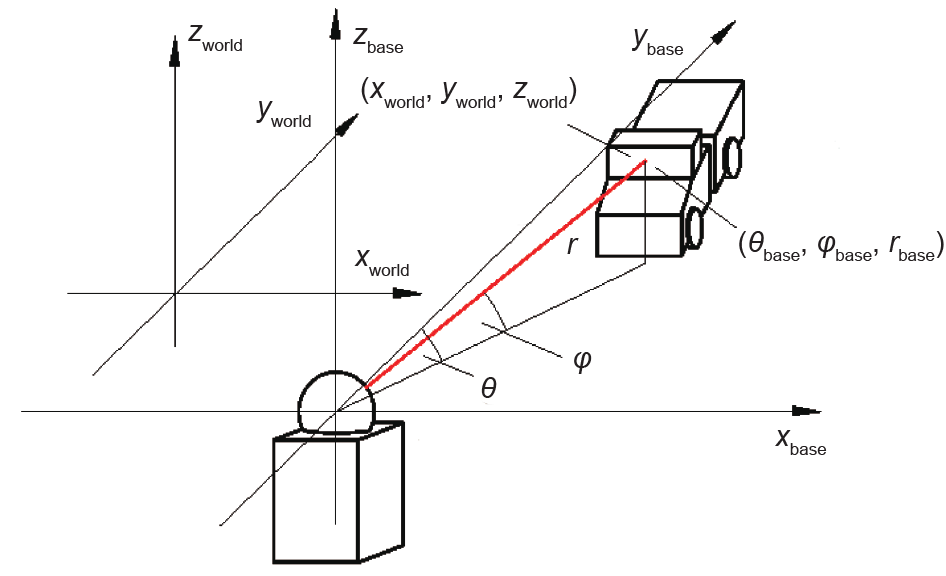
图17

图18
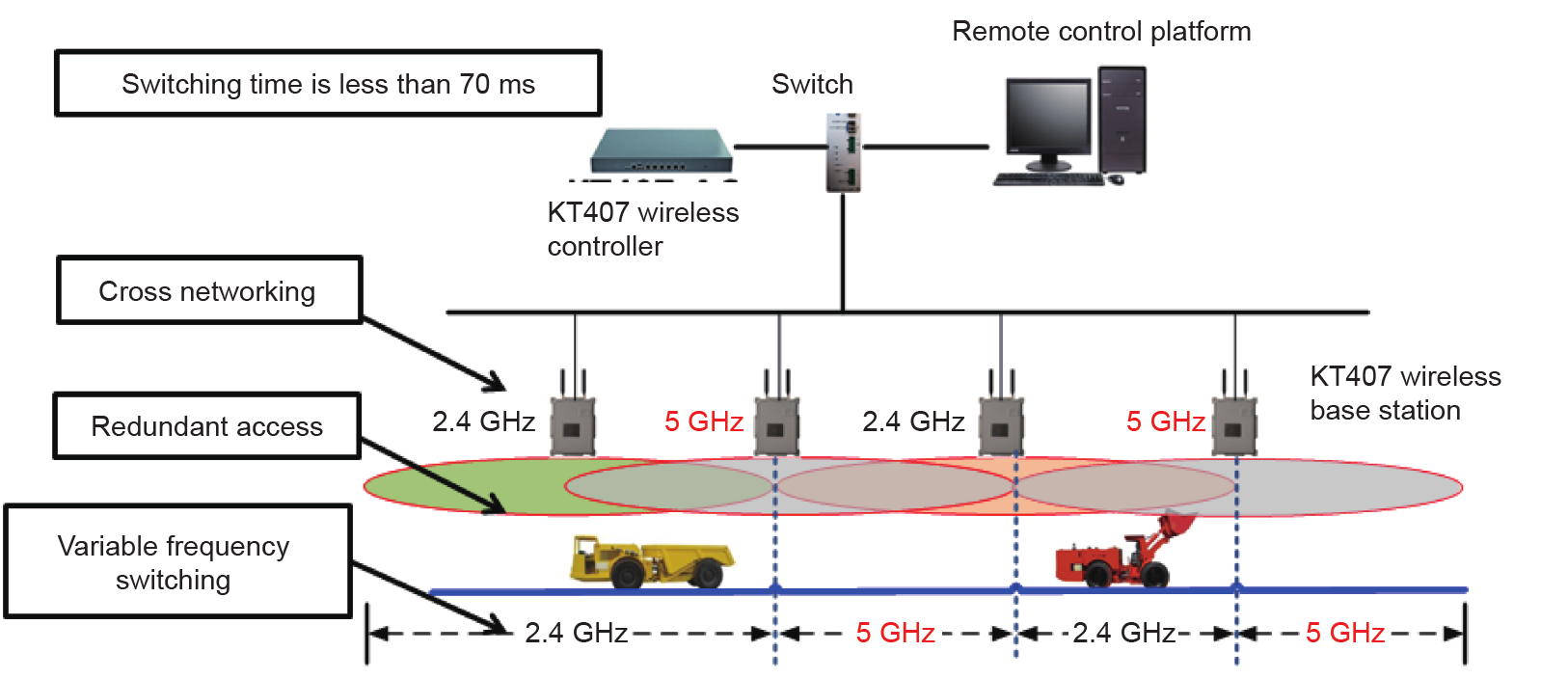
图19

图20

图21
参考文献
[ 1 ] Chang D, Liu J, Mao N, Ge S. Measurement and analysis of virgin-rock temperature in Huanren metal mine. In: Proceedings of the Third International Symposium on Mine Safety Science and Engineering; 2016 Aug 13–19; Montreal, QC, Canada; 2016. p. 204–7. 链接1
[ 2 ] Liu J, Mao N, Chen X, Chang D. Research on geothermal distribution of Hongtoushan underground metal mine. In: Proceedings of the First International Conference on Information Sciences, Machinery, Materials and Energy; 2015 Apr 11–13; Chongqing, China. Paris: Atlantis Press; 2015. p. 541–4. 链接1
[ 3 ] Cheng X, Zhang Y, Feng M, Shang T, Yuan K. Combination study on underground trackless equipment for efficient mining. Non-ferr Metall Equip 2015:41–51. Chinese.
[ 4 ] Walker S. Underground mining technology: safe working conditions and higher productivity. Eng Min J 2012;6–8:12–5. 链接1
[ 5 ] Gu DS, Zhou KP. The development theme of modern metal mining. Metal Min 2012;7(7):1–8. Chinese. 链接1
[ 6 ] Jonathon R, David R, Chad H, David H. Sensing for advancing mining automation capability: a review of underground automation technology development. Int J Min Sci Technol 2014;24(3):305–10. 链接1
[ 7 ] Gustafson A, Schunnesson H, Galar D, Kumar U. The influence of the operating environment on manual and automated load-haul-dump machines: a fault tree analysis. Int J Min Reclam Environ 2013;27(2):75–87. 链接1
[ 8 ] Frank N. LHD automation DAS the way to go. Austra Min 2003;8:38–9.
[ 9 ] Wang LG. Digital mining technology and upgrading of mine technology in China. World Non-ferr Metal 2015;7:13–8. Chinese. 链接1
[10] Carter RA. Equipment selection is key for productivity in underground loading and haulage. Eng Min J 2014;215(6):45–7. 链接1
[11] Gustafson A, Lipsett M, Schunnesson H, Galar D, Kumar U. Development of a Markov model for production performance optimization. Application for semi- automatic and manual LHD machines in underground mines. Int J Min Reclam Environ 2014;28(5):342–55. 链接1
[12] Prasad BNVS, Murthy V, Pandey SK. Investigations on rock drill ability applied to underground mine development vis-à-vis drill selection. In: Proceedings of the Conference on Recent Advances in Rock Engineering; 2016, Nov 16–18; Bengaluru, India; 2016. 链接1
[13] Hwang UK, Lim JH. Optimization of down-the-hole hammer using experimental design method. Trans Korean Soc Mechan Eng A 2016;40 (6):603–11. Korean. 链接1
[14] Hwang UK. Modelling and test of down-the-hole hammer. J Drive and Control 2015;12(2):34–8. Korean. 链接1
[15] Dindarloo S. Reliability forecasting of a load-haul-dump machine: a comparative study of ARIMA and neural networks. Qual Reliab Eng Int 2016;32(4):1545–52. 链接1
[16] Jonathan MR, Elliot SD, Peter IC, Pavan S, Graeme JW, Jock C. Autonomous control of underground mining vehicles using reactive navigation. In: Proceedings of the 2000 IEEE International Conference on Robotics and Automation, 2000 Apr 24–28; San Francisco, CA, USA; 2000. p. 3790–5. 链接1
[17] Paraszczak J, Gustafson A, Schunnesson H. Technical and operational aspects of autonomous LHD application in metal mines. Int J Min Reclam Environ 2015;29(5):391–403. 链接1
[18] Chen M, Wang L, Jia M, Chen Z, Liu L. An overview of autonomous navigation techniques and development trend for underground LHD. Chin J Safety Sci 2013;23(3):130–4. Chinese.
[19] Mbhalati W. LHD optimization at an underground chromite mine. J S Afr Inst Min Metall 2015;115(4):313–20. 链接1
[20] Chi HP, Zhan K, Shi F. Automatic guidance of underground mining vehicles using laser sensors. Tunn Undergr Space Technol 2012;27(1):142–8. 链接1
[21] Zhao X, Yang Y, Li L, Zhang W, Zeng J. Path tracking control for autonomous underground mining articulated dump truck. Electroteh Electron Auto 2015;63(3):75. 链接1
[22] Wang M, Zang H, Gong B. General situation of intelligent development of underground charging vehicle. Min Tech 2016;16(1):70–2. 链接1
[23] Fei M, Yang H, Gu Q, Meng Y. Navigation path planning of underground unmanned LHD vehicle based on improved A⁄ algorithm. Trans Chin Soc Agr Mach 2015;46(7):303–9. Chinese.
[24] Alshaer BJ, Darabseh TT, Momani AQ. Modelling and control of an autonomous articulated mining vehicle navigating a predefined path. Int J Heavy Veh Syst 2014;21(2):152–68. 链接1
[25] Yu L, Zhang Y, Lu D. Development of mine integrated spatial information measuring instrument. Metal Min 2014;43(5):118–20. Chinese.
[26] Chen ZQ. Research on key technologies of intelligent operation for underground metal mine [dissertation]. Changsha: Central South University; 2014. Chinese. 链接1











 京公网安备 11010502051620号
京公网安备 11010502051620号




