
2015年 第1卷 第1期
《工程(英文)》 >> 2015年 第1卷 第1期 doi: 10.15302/J-ENG-2015007
助老服务机器人系统设计及软件架构
Computer Science Department, University of Hamburg, Hamburg D-22527, Germany
下一篇 上一篇
摘要
将智能人居辅助环境系统与服务机器人技术相结合,可以有效帮助老年人进行很多日常活动,有利于老年人获得更加良好的生活状态。本文概述了欧盟项目Robot-Era开发的智能人居辅助环境(AAL)系统,并重点阐述了系统中具有室内移动及物品操作能力的机器人的工程实现方法以及软件架构。该系统基于机器人操作系统(ROS)对大量先进的导航定位、环境感知以及操作控制算法进行集成,并通过实验对机器人的性能和实际应用效果进行验证。
图片
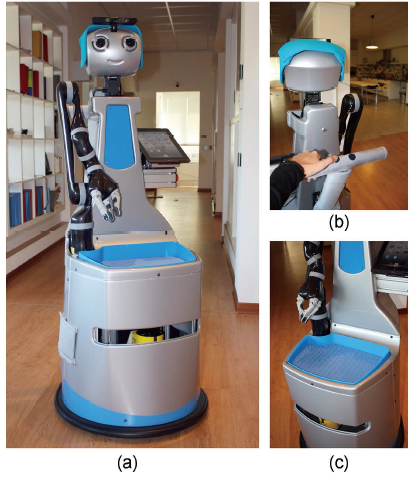
图1
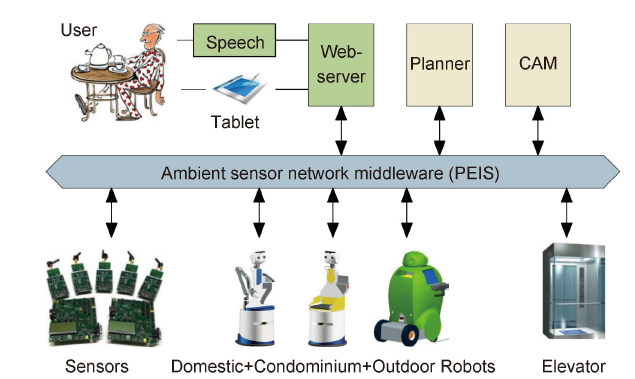
图2
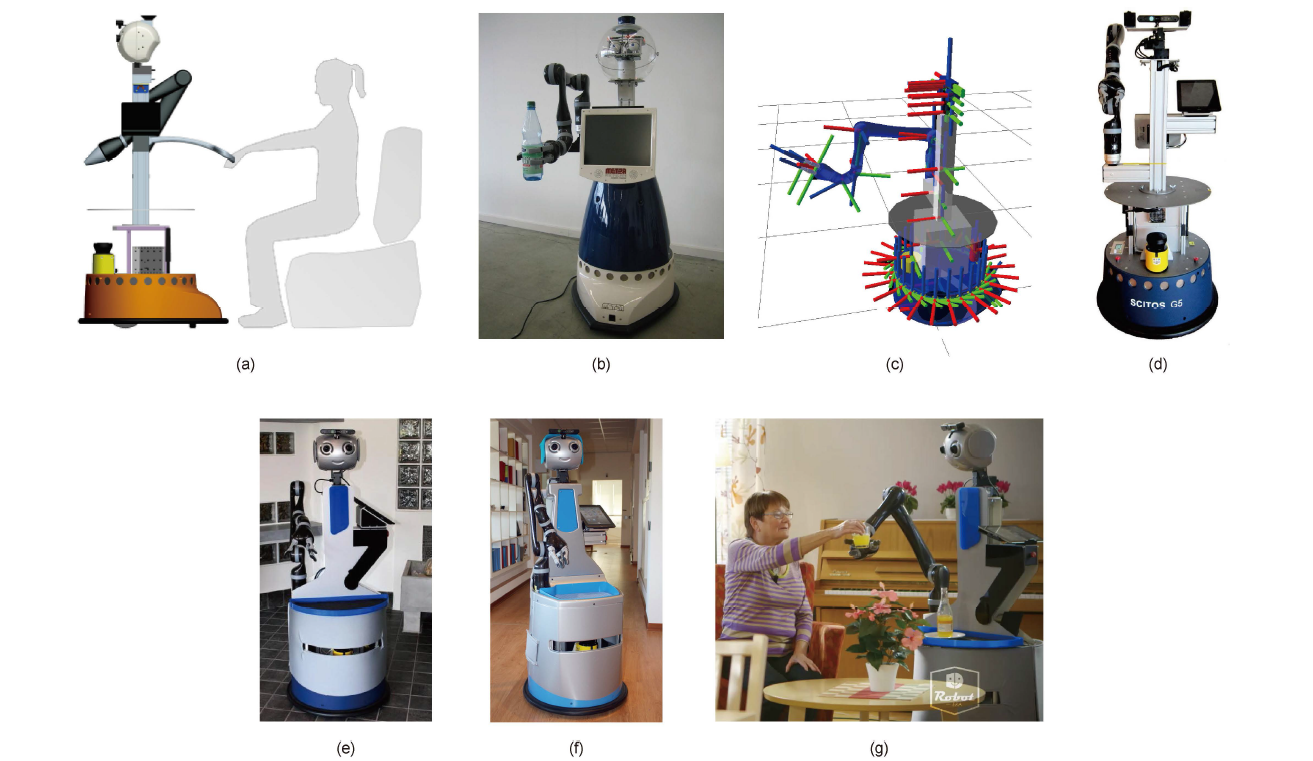
图3
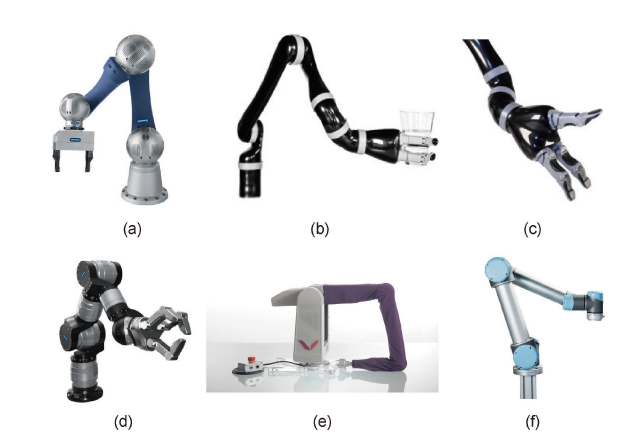
图4
图5
图7
图8
图9
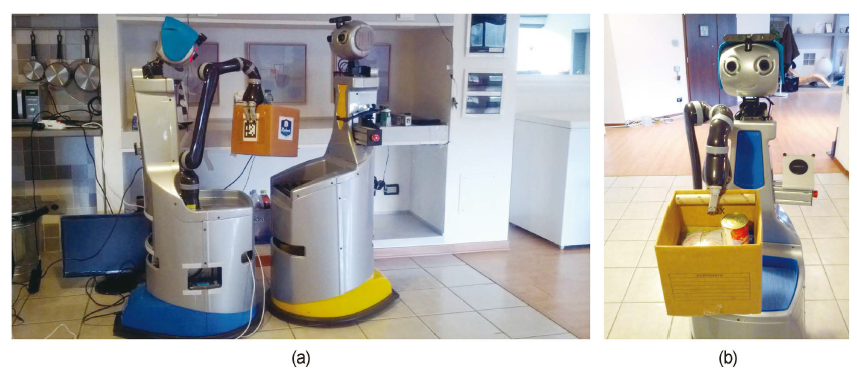
图10
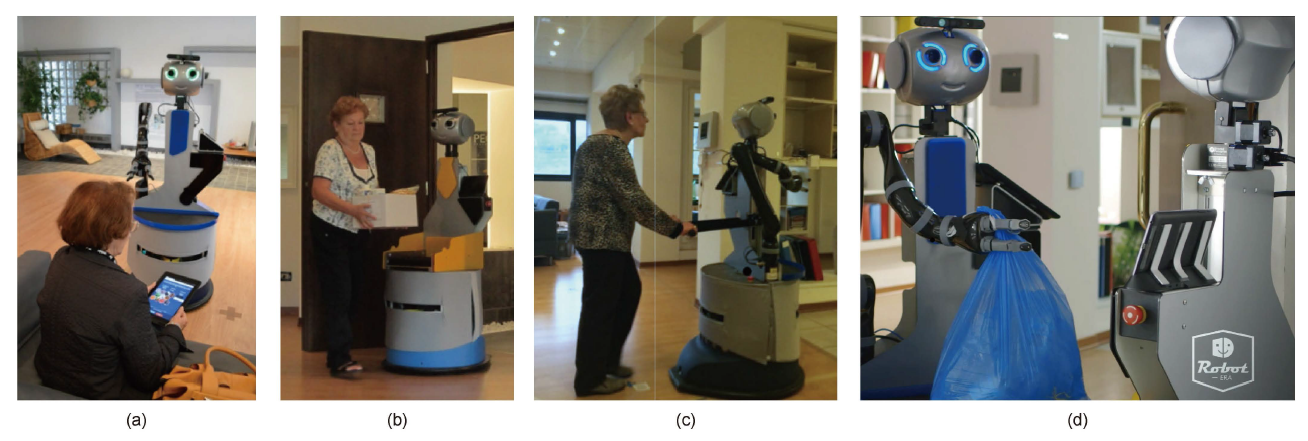
图11
参考文献
[ 1 ] I. Conrad, S. Glende, L. Krezdorn, L. Trieste, G. Turchetti. D9.4, Second report on services, business and marketing models for Robot-Era services, project report, 2015, www.robot-era.eu
[ 2 ] F. Cavallo, M. Aquilano, M. C. Carrozza, P. Dario. Robot-era project: The vision of 3D service robotics. Gerontechnology, 2012, 11(2): 364
[ 3 ] F. Marcellini, Report on the robotic services analysis with respect to elderly users, project report, 2012, www.robot-era.eu
[ 4 ] N. J. Nilsson. Shakey the Robot (Technical Note 323). Menlo Park, California: SRI International, Artificial Intelligence Center, 1984
[ 5 ] R. Brooks. A robust layered control system for a mobile robot. IEEE J. Robot. Autom., 1986, 2(1): 14–23
[ 6 ] T. H. J. Collett, B. A. MacDonald, B. P. Gerkey. Player 2.0: Toward a practical robot programming framework. In: Proceedings of Australasian Conference on Robotics and Automation (ACRA 05). IEEE, 2005: 1–9
[ 7 ] G. Metta, P. Fitzpatrick, L. Natale. YARP: Yet another robot platform. Int. J. Adv. Robot. Syst., 2006, 3(1): 43–48
[ 8 ] M. Quigley, ROS: An open-source Robot Operating System. In: International Conference on Robotics and Automation (ICRA) Workshop on Open-Source Software, 2009
[ 9 ] E. Einhorn, T. Langner, R. Stricker, C. Martin, H. M. Gross. MIRA-middleware for robotic applications. In: Proceedings of 2012 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2012), 2012: 2591–2598
[10] R. D. Schraft, J. Neugebauer, C. Schaeffer, T. May. Care-O-bot®: Ein technisches Hilfssystem für unterstützungs- und pflegebedürftige Personen im häuslichen Bereich. In: H. Wörn, R. Dillmann, D. Henrich, eds. Autonome Mobile Systeme 14. Berlin, Heidelberg: Springer, 1998: 234–244
[11] M. Hans, B. Graf. Robotic home assistant Care-O-bot II. In: E. Prassler, , eds. Advances in Human-Robot Interaction. Berlin, Heidelberg: Springer, 2004: 371–384
[12] C. Parlitz, M. Hägele, P. Klein, J. Seifert, K. Dautenhahn. Caro-O-bot 3—Rationale for human-robot interaction design. In: Proceedings of 39th International Symposium on Robotics (ISR), 2008: 275–280
[13] M. Hans, W. Baum. Concept of a hybrid architecture for Care-O-bot. In: Proceedings of 10th IEEE International Workshop on Robot and Human Interactive Communication. IEEE, 2001: 407–411
[14] T. Morita, H. Iwata, S. Sugano. Development of human symbiotic robot: WENDY. In: Proceedings of 1999 IEEE International Conference on Robotics and Automation, vol. 4. IEEE, 1999: 3183–3188
[15] Willow Garage Inc. Robot for research and innovation. https://www.willowgarage.com/pages/pr2/overview
[16] S. Cousins. ROS on the PR2 [ROS Topics]. Robot. Autom. Mag., IEEE, 2010, 17(3): 23–25
[17] A. Hermann, Hardware and software architecture of the bimanual mobile manipulation robot HoLLiE and its actuated upper body. In: Proceedings of 2013 IEEE/ASME International Conference on Advanced Intelligent Mechatronics (AIM). IEEE, 2013: 286–292
[18] MetraLabs GmbH. Scitos G5 mobile platform. metralabs.com/index.php?option=com_content&view=article&id=70&Itemid=64
[19] F. Cavallo. Improving domiciliary robotic services by integrating the ASTRO robot in an AmI infrastructure. In: F. Röhrbein, G. Veiga, C. Natale, eds. Gearing Up and Accelerating Cross—Fertilization between Academic and Industrial Robotics Research in Europe. Springer, 2014: 267–282
[20] Schunk Gmbh & Co. KG. Powerball lightweight arm LWA 4P. http://mobile.schunk-microsite.com/en/produkte/produkte/powerball-lightweight-arm-lwa-4p.html
[21] Kinova Robotics, Kinova Jaco Research Edition. kinovarobotics.com/products/jaco-researchedition/
[22] Schunk Gmbh & Co. KG. Dextrous lightweight arm LWA 4D. http://mobile.schunk-microsite.com/en/produkte/produkte/dextrous-lightweight-arm-lwa-4d.html
[23] BionicRobotics GmbH. Bionic robotics: Biorob arm. http://www.bionic-robotics.de/en/products/biorob-arm.html
[24] Universal Robots. UR5 arm. www.universal-robots.com/GB/Products/
[25] V. Maheu, J. Frappier, P. S. Archambault, F. Routhier. Evaluation of the JACO robotic arm: Clinico-economic study for powered wheelchair users with upper-extremity disabilities. In: Proceedings of 2011 IEEE International Conference on Rehabilitation Robotics (ICORR). IEEE, 2011: 1–5
[26] A. Saffiotti, M. Broxvall. PEIS ecologies: Ambient intelligence meets autonomous robotics. In: Proceedings of the International Conference on Smart Objects and Ambient Intelligence, 2005: 277–281
[27] M. Broxvall, M. Gritti, A. Saffiotti, B. S. Beo, Y. J. Cho. PEIS ecology: Integrating robots into smart environments. In: Proceedings of 2006 IEEE International Conference on Robotics and Automation (ICRA), 2006: 212–218
[28] M. Di Rocco, A planner for ambient assisted living: From high-level reasoning to low-level robot execution and back. In: AAAI Spring Symposium “Qualitative Representations for Robots”, 2014: 10–17
[29] N. Hendrich, H. Bistry, B. Adler, J. Zhang. User-driven software design for an elderly care service robot. In: Proceedings of the 8th International Conference on Pervasive Computing Technologies for Healthcare, 2014: 142–149
[30] I. Sucan. Universal robot description format. http://wiki.ros.org/urdf
[31] E. Marder-Eppstein, V. Pradeep. ROS actionlib. http://wiki.ros.org/actionlib
[32] D. G. Lowe. Object recognition from local scale-invariant features. In: The Proceedings of the Seventh IEEE International Conference on Computer Vision, vol. 2. IEEE, 1999: 1150–1157
[33] E. Olson. AprilTag: A robust and flexible visual fiducial system. In: Proceedings of 2011 IEEE International Conference on Robotics and Automation (ICRA). IEEE, 2011: 3400–3407
[34] J. R. Lewis, J. Sauro. The factor structure of the system usability scale. In: M. Kurosu, ed. Human Centered Design. Berlin, Heidelberg: Springer, 2009: 94–103
[35] S. McLellan, A. Muddimer, S. C. Peres. The effect of experience on System Usability Scale ratings. J. Usability Stud., 2012, 7(2): 56–67
[36] F. Cavallo, D8.2 Report on results obtained in the first cycle of the Robot-Era experimentation, project report, 2014. www.robot-era.eu
[37] F. Pecora, D2.8 Second report on the S/T requirements of the Robot-Era components, project report, 2015. www.robot-era.eu











 京公网安备 11010502051620号
京公网安备 11010502051620号




