
2011年 第13卷 第3期
V/STOL飞机建模与仿真分析
1. 清华大学计算机科学与技术系,北京 100084;
2. 海军装备研究院,北京 100161
下一篇 上一篇
摘要
以原理验证机为背景,建立了无尾布局垂直/短距起降飞行器的数学模型,并通过智能自适应方法对其进行了闭环飞行控制,控制量通过控制分配合理的协调各操纵面,最后在MATLAB7.0/Simulink环境下通过数值仿真进行了验证。结果显示,该平台具备垂直/短距起降能力和较好的飞行性能。
关键词
无尾布局飞行器 ; 垂直/短距起降飞行器(V/STOL) ; 动力学建模 ; 飞行控制
图片

图1

图2

图3
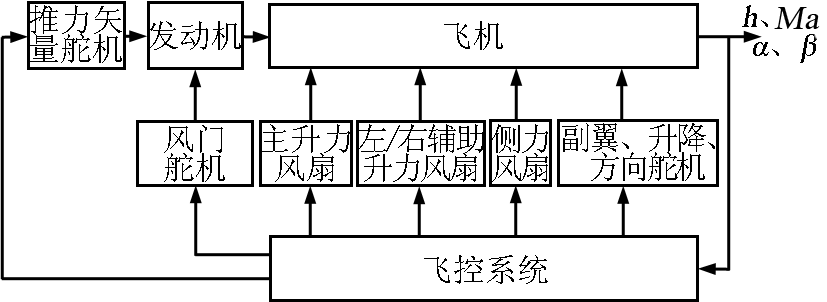
图4

图5
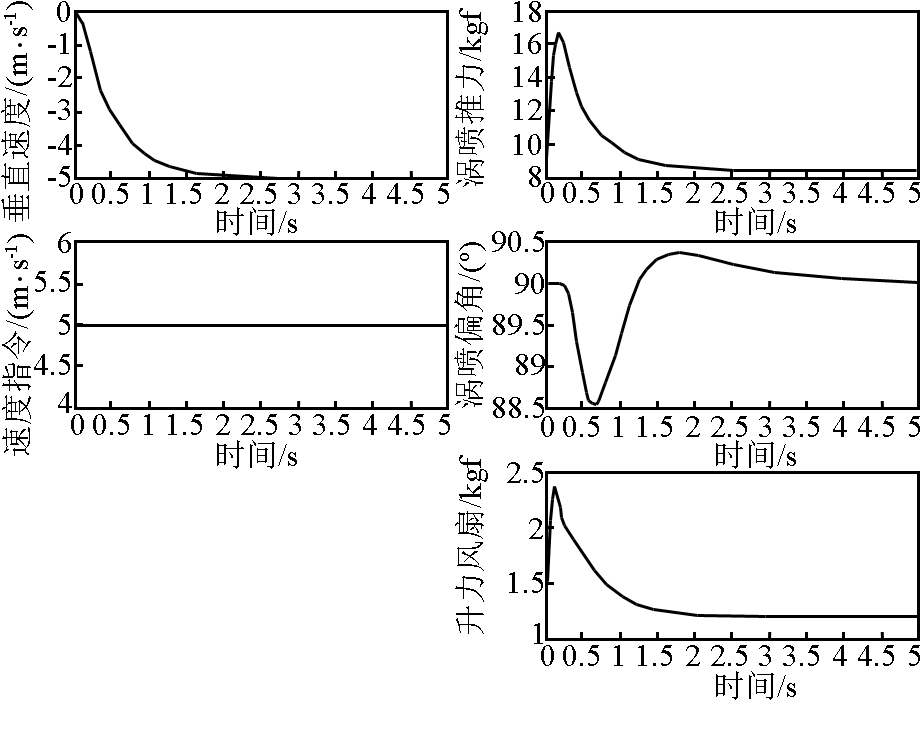
图6

图7
参考文献
[ 1 ] Hirschberg M J.An overview of the history of vertical and /or short take -off and landing ( V /STOL ) aircraft [ J /OL ] .CENTRA Technology Inc. http: //www.V /STOL.org /brief.htm, 2009 , ( 8 ) :28
[ 2 ] Walker G P, Allen D A.X -35B V /STOL flight control law de- sign and flying qualities[ C] //2002 Biennial International Powered Lift Conference and Exhibit.USA:Wiliams Burg,2002.
[ 3 ] Bordignon K, Bessolo J. Control Allocation for the X -35B [ C ] //2002 Biennial International Powered Lift Conference and Exhibit 5 -7 November 2002 ,USA:Wiliams Burg,2002.
[ 4 ] Yang Xili, Fan Yong, Zhu Jihong.Transition flight control of two vertical /short takeoff and landing aircraft [ J ] .AIAA Journal of Guidance, Control and Dynamics, 2008 , 31 ( 2 ) : 371 -385. 链接1
[ 5 ] 王健.先进短距起飞垂直着陆飞机的非线性动态逆控制[D].南京:南京航空航天大学,2000.
[ 6 ] Joseph S, Brinker, Kevin A, et al.Reconfigurable flight control for a tailless advanced fighter aircraft[ J] .AIAA Guidance, Navi- gation and Control Conference and Exhibit, 1998 ,( 8 ) :10 -12. 链接1
[ 7 ] Joseph S,Brinker, Kevin A, et al.Nonlinear simulation analysis of a tailless advanced fighter aircraft reconfigurable flight control law[ J] .AIAA Guidance, Navigation and Control Conference and Exhibit, 1999 ,( 8 ) :9 -11. 链接1
[ 8 ] Calise A J,Lee S,Sharma M.Direct adaptive reconfigurable con- trol of a tailless fighter aircraft [ J] .AIAA Guidance, Navigation and Control Conference and Exhibit, 1998 ,( 8 ) :10 -12. 链接1
[ 9 ] Anthony J.Calise.Development of a reconfigurable flight control law for the X -36 tailless fighter aircraft [ J] .AIAA Guidance, Navigation and Control Conference and Exhibit, 2000 , ( 8 ) :14 - 17. 链接1
[10] Bodson M.Evaluation of optimization method for control alloca- tion [ J] .Journal of Guidance, 2002 , 25 ( 4 ) : 703 -711. 链接1











 京公网安备 11010502051620号
京公网安备 11010502051620号




