
《1 序言》
1 序言
长度 (尺度) 是最基本的物理量。长度、位移测量是一项永恒的研究课题。有很多种位移传感器, 如激光干涉仪、电容位移传感器、电涡流位移传感器、电感位移传感器, 都有其优点和不足, 在一定的应用领域, 发挥着各自的作用。激光干涉仪利用干涉现象, 以波长做尺子, 精度高。缺点是系统复杂, 属于大型贵重仪器。而光纤位移传感器、电容位移传感器、电涡流位移传感器、电感位移传感器等具有较小体积, 价格便宜。各种小型位移传感器的缺点是都有原理上的非线性, 线性测量范围较小并需要校准。发明一种新原理的小型位移传感器, 具有纳米量级分辨率, 超过十几毫米量程, 没有原理上的非线性且有自标定功能 (即不必由更高精度仪器或基准仪器标定示值和校准) 的位移传感器技术是重要研究方向。
在位移传感器领域 (以及其他领域) , 基本上是利用激光的外特性, 或者说是利用激光束的3个重要性质:高亮度、高相干性、高定向性
但是, 人们早就注意到, 驻波 (两镜, 管状或片状) 激光器谐振腔长L的改变dL和激光频率ν的改变dν 之间满足以下关系
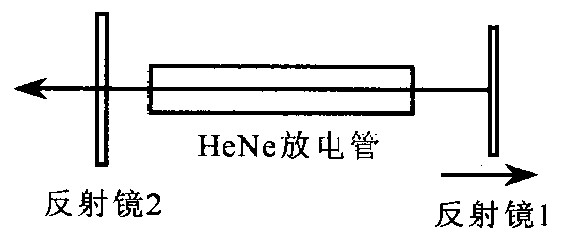
最直观的印象是式 (1) 揭示了激光腔长的微小改变转换成巨大的激光频率改变的功能。式 (1) 中, 对于HeNe 激光的0.632 8 μm波长, 如L=0.15 m, 激光腔长改变dL=1 μm, 频率改变3.16×109 Hz。这种激光腔长的改变可由沿腔轴移动反射镜实现 (见图1) , 但要通过仪器测到dν 并不容易。至今还没有一种探测器能直接探测1014 Hz的光频率, 如要探测频率差dν只能用拍频法。拍频法是国家计量标准部门正在进行的研究, 研究成一二件就够用。但是, 除了系统复杂、造价昂贵、应用环境苛刻外, 拍频法测量的范围很小。
一些科学家做过将一个激光器直接演变成位移传感器的尝试
《图2》

图2 两叉腔激光器设想 (一个杈中腔镜移动引起两个杈频率差的改变)
Fig.2 Crotched cavity laser (frequency variation in one crotch)
《2 纳米激光测尺的原理结构[5,6,7,8,9,10]》
2 纳米激光测尺的原理结构[5,6,7,8,9,10]
与任何已有的激光位移、长度测量系统不同, 激光器纳米测尺外观结构上的最特殊之点是激光器自身就是传感器, 即以几种激光物理现象为基础, 将一支氦氖激光器演变成一台可以测量位移的激光器, 所以称为激光器纳米测尺。
《图3》

Fig.3 Displacement measurement by means of iodine-absorbing peaks in movement of one cavity mirror
图4是第一种原理结构。一对反射镜M1, M2和充以He和Ne气的放电管T组成HeNe激光器。图4内画出的增益管T的窗片W是一种人造双折射元件, 其两表面都镀增透介质膜。当对光学增透窗片W上对径 (沿圆玻璃片的一个直径) 加力F时, 玻璃片内部即出现应力双折射效应:形成2个主方向, 一个和所加外力平行, 一个和所加外力垂直。加力后的玻璃片对平行偏振光 (//光) 和垂直偏振光 (⊥光) 的折射率不同, 即存在一个光程差, 光程差正比于加力的大小。 反射镜M1固定在滑动导轨 (即测杆) 上。弹簧把测杆顶压在被测工件上 (弹簧未画出) 。被测工件移动带动M1位移。M1, M2, T一起被封装在圆形融石英或殷钢管内。圆融石英管两端用端盖封住。M2贴紧并粘在左端盖, 测杆的导轨固紧在右端盖上。融石英的热膨胀系数小, 保证M1, M2的距离的稳定性, 也即激光谐振腔长的稳定性。S是一个渥拉斯顿棱镜。D1, D2是2个光电探测器。C1, C2是放大整形电路。C是信号处理电路、可逆计数器、单片机和位移显示单元。导轨TR有位移时, 推动M1位移, C显示这一位移。D1, D2, S和石英管连成一个整体, 成便携式。C1, C2, C和电源在一个电器箱内。
《图4》

Fig.4 The principle structure (Moveable mirror M1 fixed at the left end of the measuringbar)
另一种结构是把反射镜M1置于被测工件上 (如微动台) , 被测工件位移时, C显示这一位移。T被密封, 仅在右端留一个小孔使腔内激光束通过。这种结构适合于固定在需要测位移的装置上。
《3 激光器纳米测尺的物理原理》
3 激光器纳米测尺的物理原理
《3.1引入频率分裂, 将一个单频激光器变成正交偏振 (双频) 激光器》
3.1引入频率分裂, 将一个单频激光器变成正交偏振 (双频) 激光器
把式 (1) 中dL的物理意义加以推广。dL可以是一个激光腔镜沿激光束正、反方向的位移 (这是导出式 (1) 时的基本含义) , 代表了2个时刻的腔长之差。它也可以是腔内空气浓度改变引起的腔长改变, 即dL代表的也是2个时刻的腔长差。它还可以是腔内发生的各种物理现象 (如反常色散) 。重要的是在驻波腔内放入双折射元件把腔内光分解为两种偏振光, 对2种偏振光而言, 各有各的物理腔长, ΔL即是同一时刻不同偏振态的腔长差, ΔL的存在造成一个频率分裂量dν。双折射元件造成的光程差由δ表示。这样, 式 (1) 中的dL可改写成δ。在实际应用中, 并不关心频率差dν 的正负号, 而且在已有的全部探测dν 的方法中, 也不能判定dν 的正负, 因此在式 (1) 中的负号被略去并将dν 写成Δν, 有
笔者研究表明, 各种双折射元件 (晶体石英片, 方解石片, 有内应力的玻璃片, 光电晶体, 有残余应力的介质膜) 都能形成频率分裂 (频率差) Δν, 并导致其应用。
当对光学元件W对径 (沿圆玻璃片的一个直径) 加力时, 造成平行偏振光 (//光) 和垂直偏振光 (⊥光) , 其光程差δ的大小为
式中 D是光学元件的直径, f0是光学材料的条纹值, F是所加压力的大小, λ为激光的波长。式 (2) 和式 (3) 联立可得到激光器输出的垂直 (⊥) 光频率和平行 (//) 光频率之间的频差大小。
h是晶片厚度, n′和n″分别是o光和e光折射率。式 (2) 和式 (4) 联立可得腔内晶体石英造成的频率差的大小。式 (4) 中, n″是石英晶体的光轴和光线之间的夹角θ的函数, 称θ 为石英晶体调谐角。这样, 频差的大小由石英晶体在光路中的厚度h和调谐角θ所决定, 通过改变h和θ的大小来改变、控制频差的大小。
《3.2一个激光腔镜移动, 两模竞争使激光出光带宽分成三个偏振性质不同的区域》
3.2一个激光腔镜移动, 两模竞争使激光出光带宽分成三个偏振性质不同的区域
HeNe激光器的光谱线展宽机制属于以多普勒展宽为主的综合加宽, 半高宽约为1 500 MHz
《3.2.1 正交偏振两频激光器的频率间隔可调且正交偏振[11,12,13,14,15]》
3.2.1 正交偏振两频激光器的频率间隔可调且正交偏振[11,12,13,14,15]
正交偏振两频激光器有2个特殊物理特性。第一是其输出的2个频率的间隔可调, 可以连续地从40 MHz调到一个纵模间隔 (1000 MHz以上) 、几个纵模间隔甚至更多。第二是其2个相邻频率都有固定的偏振方向, 且垂直正交。第一个特性为研究不同频率间隔模式之间的竞争提供了频率间隔条件:频率间隔越小模竞争越剧烈, 以至于一个频率在竞争中失败而熄灭, 但这一条件并不充分。如果2个模 (频率) 的偏振方向是平行的, 可以借助激光扫描干涉仪特有的对不同频率的分时作用, 用一个探测器和示波器观察它们的强度 (交替出现) , 但不可能同时连续地将它们单独分离开来进行探测, 难于适时分别研究它们各自的光强, 它们之间模竞争的发生、发展和结果。而正交偏振两频激光器的正交偏振特性提供的第二条件, 可以用一个偏振分光镜 (如渥拉斯顿棱镜等) 把2个频率分开, 连续地分别观察它们在频差改变、腔调谐中各自的特性及相互影响。Lamb的计算和笔者的实验证实, HeNe激光器0.6328 μm波长的强烈和中度竞争的界线, 因不同激光器充气压的偏差、光强不同等而不同, 在28~60 MHz范围内, 当频差小于这一值时, 两频率之一熄灭, 频差大于这一值时, 两频率一起振荡。
《3.2.2 正交偏振激光器在腔调谐过程中的模竞争效应[16,17,18]》
3.2.2 正交偏振激光器在腔调谐过程中的模竞争效应[16,17,18]
笔者用谐振腔长250 mm的三纵模激光器首次观察到了正交偏振光在腔调谐中的功率特性
《图5》

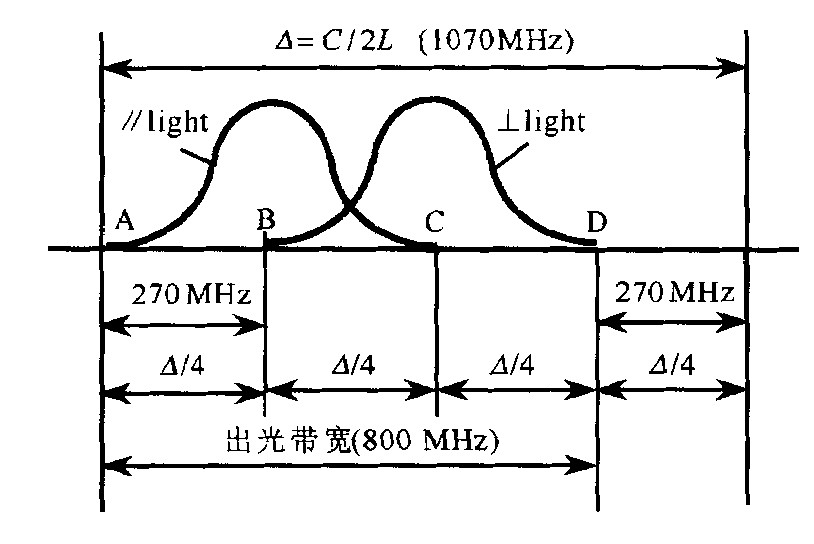
Fig.5 Longitudinal modes, mode separation and frequency splitting Δν=1070∶800=4∶3
《图6》

Fig.6 Setup for observation of intensity variation of two frequencies on screen
激光束从反射镜M2输出后, 渥拉斯顿棱镜将平行光和垂直光严格分开并照射到屏Sc (图6) 或光电探测器D1, D2上 (图7) 。图7的实验装置D1, D2探测到的光强信号示于图8 (见封面上图) , 图9是示意图。所有功率调谐曲线上都没有Lamb凹陷, 是因为作者使用了Ne20∶Ne22=1∶1的双同位素。图6的屏上A, B两点的图像示于图10和图11中, 用眼睛就可以清楚地观察。 图10和图11的方格内即是纸屏上看到的激光束偏振态变化的示意图。纸屏上A点亮, 即显示⊥光的存在, B点亮即显示//光的存在。
《图8》
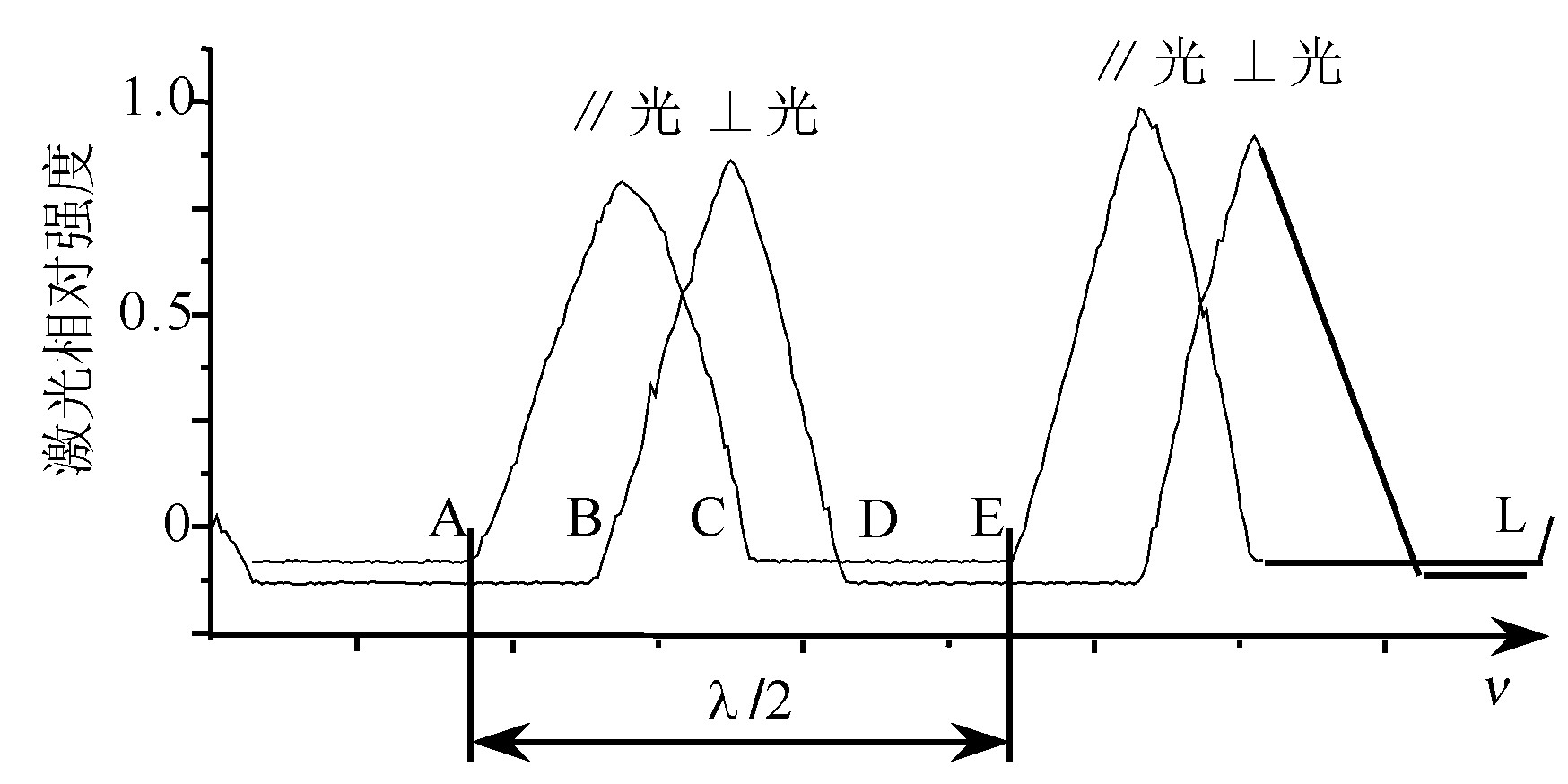
Fig.8 Intensity curves detected experimentally in movement of cavity mirror. Abscissa: A to E, half wavelength
《3.2.3 在腔调谐中“单纵模两频率”激光器输出的三种偏振状态[16,18]》
3.2.3 在腔调谐中“单纵模两频率”激光器输出的三种偏振状态[16,18]
图7中压电陶瓷长度 (也即激光器腔长) 改变时, 图5中的两个激光频率ν′q+1 (⊥光) 和ν″q+1 (//光) 顺序通过激光增益曲线, 即出现图9中2个频率各自的功率变化。由图9可以看到, 从左到右, //光比⊥光先进入出光带宽, 前者将抑制后进入出光带宽的⊥光, 形成一个远比激光器两偏振光频率之差宽得多的仅有//光的区域。反之, 如果⊥光比//光先进入出光带宽, 则形成一个远比两偏振光频率之差宽得多的仅有⊥光振荡的区域。
《图10》

图10 一个反射镜位移时, 观察到的屏上的光强变化的三个状态
Fig.10 Three states observed on the screen in the displacement of one cavity mirror
《图11》
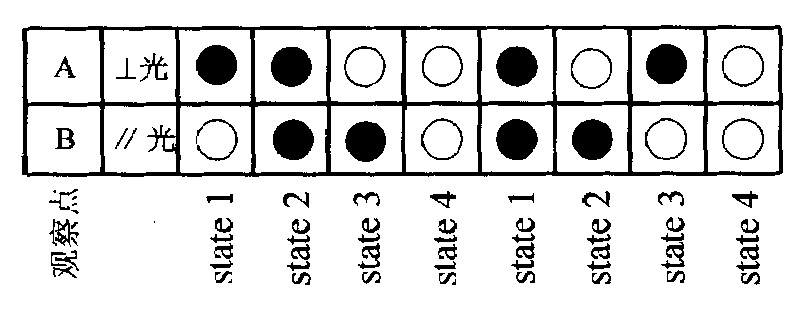
Fig.11 Four states observed on the screen in the displacement of one cavity mirror
一组典型的实验数据
当观察图6屏上A, B两点时, 就得到图10的图像, 屏上的功率有3个变化的状态:A点亮, A, B点两点同时亮, B点亮。亮、暗的过渡是渐变的, 这与图8和图9的曲线形状一致。
《3.3控制激光器腔损耗和谐振腔长, 将一个纵模间隔分成偏振不同的四等份[9,10]》
3.3控制激光器腔损耗和谐振腔长, 将一个纵模间隔分成偏振不同的四等份[9,10]
通过选择双折射双频激光器的腔长, 可以控制激光纵模间隔Δ (由式Δ=C/2L) , 使其为出光带宽的4/3。通过控制频率差设定出光带宽内3个不同偏振区等宽度。于是3/4的纵模间隔 (如800 MHz) 是出光带宽, 有激光产生, 但有1/4的纵模间隔 (如270 MHz) 不在出光带宽之内, 总没有激光产生。
当激光反射镜连续移动时, 图9所示的状态变成周期出现的状态, E点变成//光的起点, 并不断重复下去。反复出现的四个区域是图5中一系列激光纵模依次通过静止不动氖原子光谱区 (增益曲线) 形成的。一个纵模从左到右通过了增益曲线, 就出现一个图8中包含四个状态的周期 (A到D和E到L) 。曲线也精确的给出了⊥光和//光的功率变化过程和各自在频率轴上存在的区间。图11给出了4个区轮流出现时在SC 上看到的光强变化。
由此可见, 图2的分杈腔不能成功的原因:只在B区时两激光杈中都有激光振荡 (但仅有约0.1 μm的范围) 。在A, C两区, 两杈腔中只有一个杈有光振荡, 没有频率差, 两杈腔原理失效。
《3.4判向原理[9,10]》
3.4判向原理[9,10]
判别方向可由电路按4个区域光的偏振的不同性质实现。比如, 反射镜刚开始移动时, 两偏振频率正处在//光区。反射镜M1向着窗片W移动, 两偏振光频率向右便进入无光区 (两探测器都暗) , 如M1离开窗片W而去, 两偏振光向左移便进入⊥光//光共存区 (两探测器都亮) 。以4个区域的任何一个为位移测量的出发位置, 都能从两探测器的亮暗区分出向左移或向右移。
《3.5腔镜移动λ/2, 频率移动半个纵膜间隔;腔镜移动λ/8, 出现一个区域[9,10]》
3.5腔镜移动λ/2, 频率移动半个纵膜间隔;腔镜移动λ/8, 出现一个区域[9,10]
设激光频率的移动量dν 为一个纵模间隔Δ, 因为Δ=C/2L, 有
λ是激光波长 (λ=C/ν) 。式 (5) 表明, 激光频率向右 (正方向) 移动一个纵模间隔, 意味着反射镜M1向负方向移动了二分之一个波长。因此只要数出频率移动过的纵模间隔数目J, 即可知道镜M1移动的距离
而每出现一个偏振区域, 表示M1走过八分之一波长。所以, 如出现的区域数是N, 有
式 (7) 是激光器纳米测尺计算位移公式。λ是激光增益介质的中心波长在激光腔内光路中的平均值, 称平均波长。从式 (6) 可知, 激光测尺是自标定的。对HeNe激光0.6328 μm波长, λ/8为79 nm。79 nm的位移测量分辨率已进入纳米的范畴, 所以称为激光器纳米测尺。一个纵模间隔内的4个区域宽度的一致性靠调整频率差取得。
由于激光干涉仪在科技发展上的重要地位, 它成了衡量各种位移测量仪器的“参照”。又因为各种激光干涉仪一律使用稳频技术把激光器的输出频率 (即波长) 稳定到10-7以上, 甚至10-9, 人们习惯于使用定值的频率。实际上, 在10~20 mm的测量的范围内, 平均波长 (频率) 不一定比定值的频率 (波长) 精度差, 反而比使用定值的频率 (波长) 方便, 因为它不需要使用复杂昂贵的稳定频率的技术。即使不使用平均波长, 仍使用频率稳定概念, 一个十几毫米的测量范围, 79 nm分辨率的激光器纳米测尺也不会超差。也就是说, 用出光带宽内的任一频率 (波长) 代入式 (6) 和式 (7) , 误差都不超出79 nm。通过简单运算就可以证明这一点, 这是激光器纳米测尺的一项重要优点。
《3.6信号处理及位移显示》
3.6信号处理及位移显示
⊥光、//光分别射入各自的光点探测器D1, D2上, 光电探测器将光强信号变成电信号。再经过整形部分, 变成数字信号。在整形电路中, 可根据⊥光、//光的光功率调整比较电平, 在电路上修正⊥光、//光光强及光电转换电路不对称造成的误差, 保证将一个纵模间隔准确4等分。然后两路方波信号进入脉冲发生及逻辑判向电路, 得到正向和反向脉冲。这两路脉冲进入加减可逆计数器及显示电路, 由数码管等方式显示腔镜的位移变化。
《3.7使用逆向镜提高稳定性和增加量程》
3.7使用逆向镜提高稳定性和增加量程
激光器测尺对推动反射镜M1移动的导轨要求很高, 导轨在前进 (后退) 中的摆动将使M1的面法线与激光器轴线有一偏转角, 引起光腔失谐, 光腔的几何损耗增大, 从而影响激光输出功率, 严重时, 激光器甚至停止振荡。
为此, 笔者和同事在使用高精度 (优于5 μm) 导轨的同时, 提出并研究了逆向镜腔结构:猫眼腔猫眼由一个凹面镜和一个凸透镜构成一个反射镜, 并作为激光器纳米测尺中和测杆连接的动镜。当猫眼代替图4中平面镜M1时, 无论射入它的光是什么方向, 都能平行地反射回去。因此移动过程中, 作为反射镜的猫眼的光轴与激光器轴线有偏转角时, 腔内激光束仍然按原方向返回, 激光器不易失谐。猫眼的结构也存在原理上的缺陷, 猫眼的轴线和光线夹角改变时, 从猫眼出射的光线总和入射光线平行, 但是当猫眼的轴线相对与激光器的轴线平移时, 出射光线也发生平移。实验表明, 导轨的精度能保证这种平移很小, 且激光功率的稳定性对平移较不敏感, 使这一误差在允许的范围之内。
《4 激光器纳米测尺系统达到的指标和特点》
4 激光器纳米测尺系统达到的指标和特点
1) 激光器纳米测尺不使用干涉现象, 但也成功地利用了以“激光腔镜移动半波长、激光频率移动一个纵模间隔”为其工作原理。激光器纳米测尺有自标定功能, 作半波长分辨率使用时不需校准, 也可作为计量校准仪器使用。有很多种位移传感器, 如电容位移传感器、电涡流位移传感器、电感位移传感器, 线性测量范围较小并需要校准。
2) 有较高的分辨率和精度。激光器纳米测尺测量分辨率为八分之一波长。对于633 nm波长HeNe激光, 八分之一波长是79 nm。检定值为79.08 nm, 最大重复性误差为2σ=0.314 μm。
重复性误差的主要来源是在测量开始和结束各有一个λ/8的区域, 测量中不能判断在此区域中的位置, 图9中表现为测尺不能判断起点 (或终点) 更靠近A点还是B点。
3) 线性度好。因为激光腔镜移动半波长频率移动一个纵模间隔的规律在任何激光腔长下都成立, 即在任何测量范围内都成立。在半波长分辨率内, 它没有原理上的非线性, 在实验中也没有发现影响预计分辨率的非线性。对实际系统的实测中, 平均波长和约2×10-5 (12×103/79) 对正交偏振频率扫过增益线带来的非线性远小于79 nm 的标称分辨率。中国计量科学院的检定结果表明, 激光器纳米测尺线性度达到0.003 6 %。这比电感位移传感器、电容位移传感器、电涡流位移传感器等高出2个数量级。
4) 激光器自身就是位移传感器, 结果简单, 便携, 造价低。
5) 零点漂移很小, 一般实验室条件下, 仅为1脉冲/小时 (相当于0.079 μm/h) 。
6) 它不经A/D转换就是数字输出, 易于和被测物体的加工控制机构结合。
《5 结语》
5 结语
较为完整地的介绍了笔者及合作者研制成的激光器纳米测尺原理。这一研究成果的最明显特点是它在科学上的综合性和自主创新性。以解决测量问题为目的, 激光器纳米测尺的构思综合运用了激光原理中几乎是全部的基本概念, 也包括我们发现的一些新的现象。如纵模及间隔、模的分裂、激光介质线宽和增益、模的竞争、腔的调谐、腔的设计等, 以及应力双折射和晶体石英双折射等。
目前, 激光器纳米测尺已仪器化, 测量范围已达到15 mm, 分辨率为79 nm。一台仪器由2个部件构成:一个激光器测头和一个仪器箱 (内有嵌入式计算机) 。激光器纳米测尺的“纳米”两字应理解为纳米量级。
激光器纳米测尺在使用方法上和电感测微仪相同, 也是由测杆和被测物接触, 显示器显示位移。因此, 相当多电感测微仪的工作可由分辨率更高、测程更大、线性度更好的激光器纳米测尺替代。如应用于热膨胀系数、压电陶瓷、磁致伸缩材料的伸缩量、机械零部件的位移测量、量块标定以及桥梁、水坝、建筑物的变形测量、液位测量等。
激光器纳米测尺是我们研究正交偏振激光原理及应用中的系列成果之一。
致谢:感谢周炳琨院士、全国藩院士对相关研究的支持和对本文的修改。











 京公网安备 11010502051620号
京公网安备 11010502051620号




