
2016, Volume 2, Issue 3
Engineering >> 2016, Volume 2, Issue 3 doi: 10.1016/J.ENG.2016.03.003
An Enhanced Physically Based Scour Model for Considering Jet Air Entrainment
a Laboratory of Hydraulic Constructions (LCH), École polytechnique fédérale de Lausanne (EPFL), Lausanne CH-1015, Switzerland
b Civil Engineering Research and Innovation for Sustainability (CERIS), Instituto Superior Técnico, Universidade de Lisboa, Lisbon 1049-001, Portugal
Next Previous
Abstract
Based on systematic experiments on the influence of air entrainment on rock block stability in plunge pools impacted by high-velocity jets, this study presents adaptations of a physically based scour model. The modifications regarding jet aeration are implemented in the Comprehensive Scour Model (CSM), allowing it to reproduce the physical-mechanical processes involved in scour formation concerning the three phases; namely, water, rock, and air. The enhanced method considers the reduction of momentum of an aerated jet as well as the decrease of energy dissipation in the jet diffusive shear layer, both resulting from the entrainment of air bubbles. Block ejection from the rock mass depends on a combination of the aerated time-averaged pressure coefficient and the modified maximum dynamic impulsion coefficient, which was found to be a constant value of 0.2 for high-velocity jets in deep pools. The modified model is applied to the case of the observed scour hole at the Kariba Dam, with good agreement.
Keywords
Air entrainment ; Uplift ; Rock scour ; Dam safety ; High-velocity jets ; Block stability ; Scour assessment
Figures
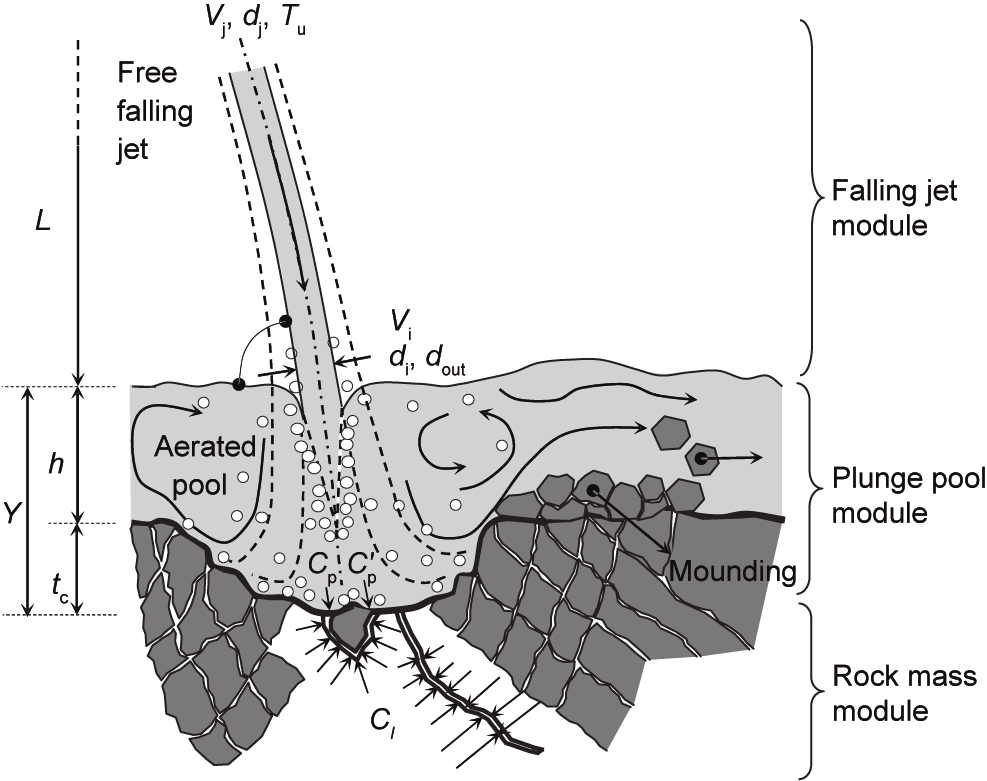
Fig. 1
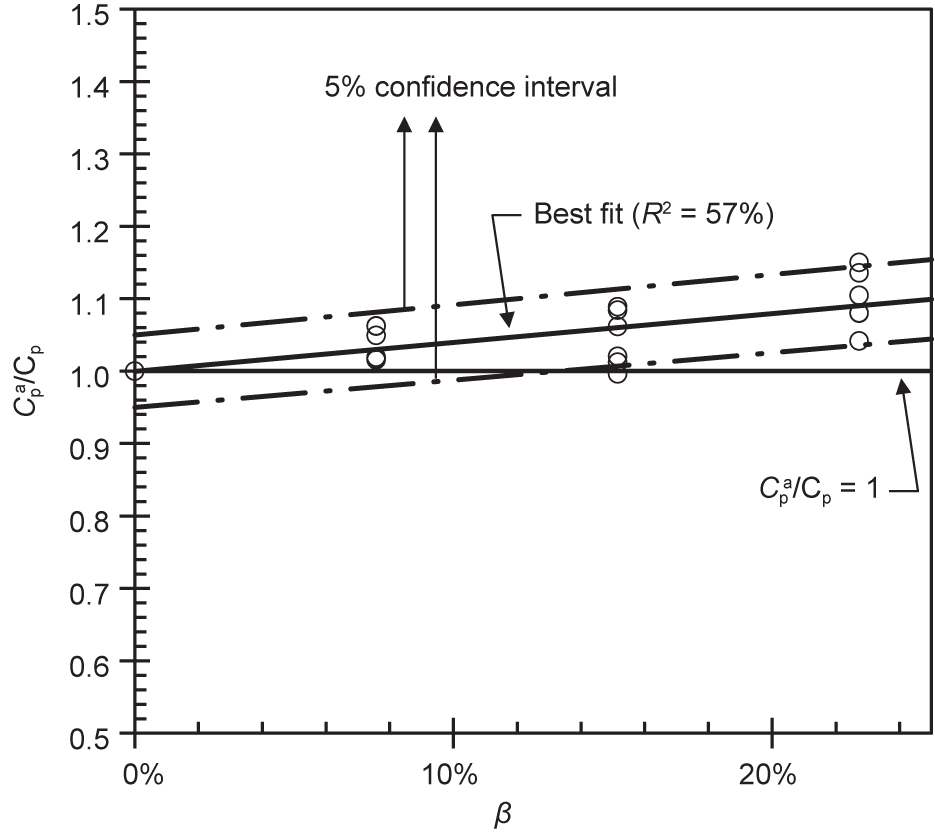
Fig. 2

Fig. 3
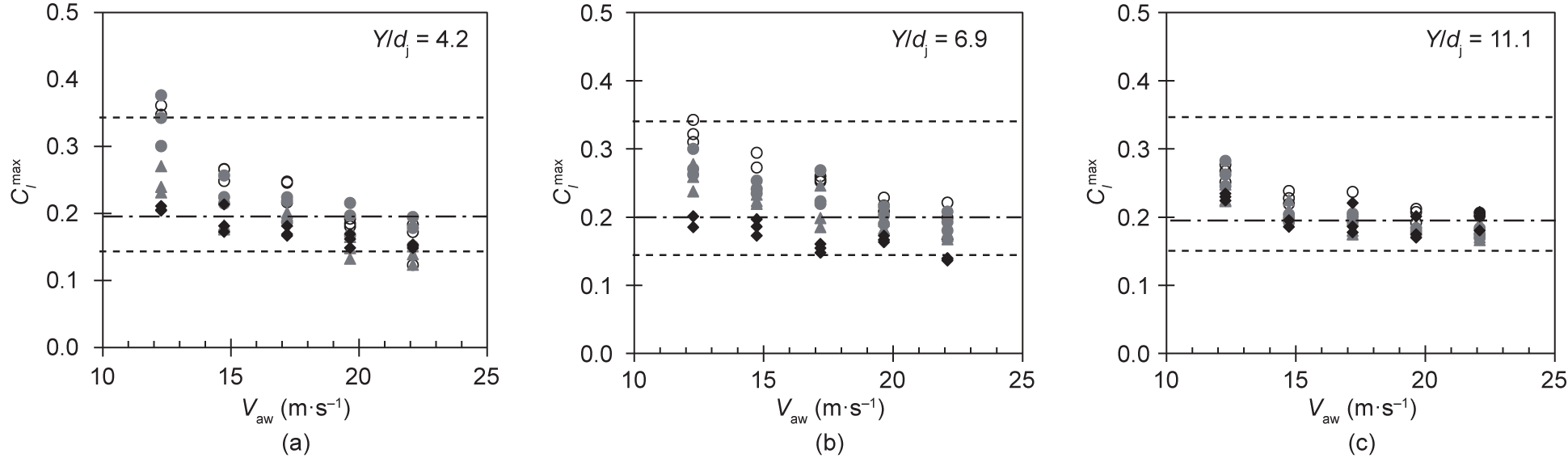
Fig. 4

Fig. 5

Fig. 6
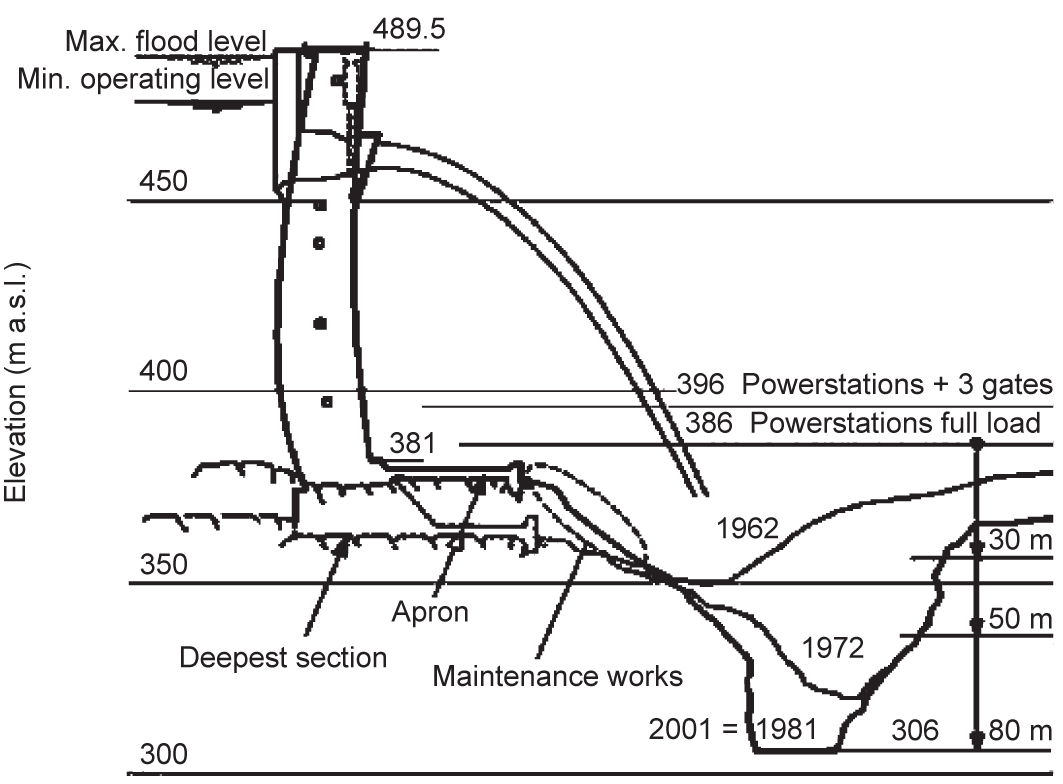
Fig. 7
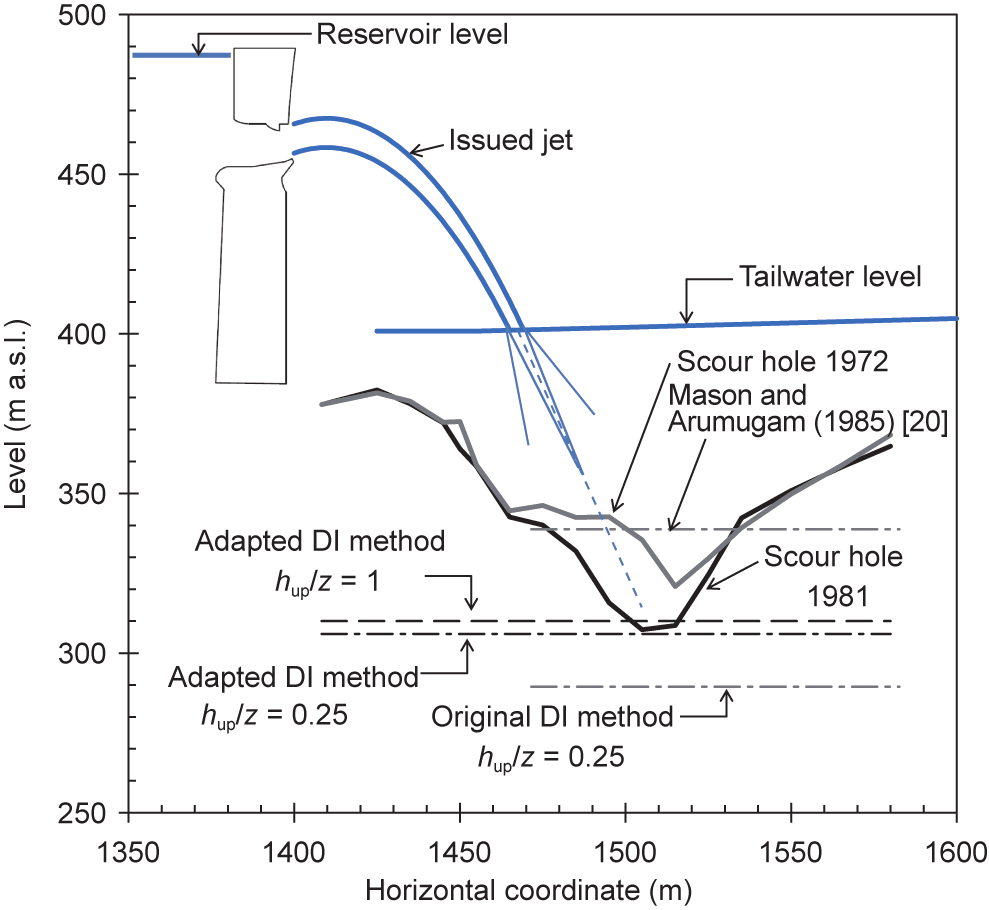
Fig. 8
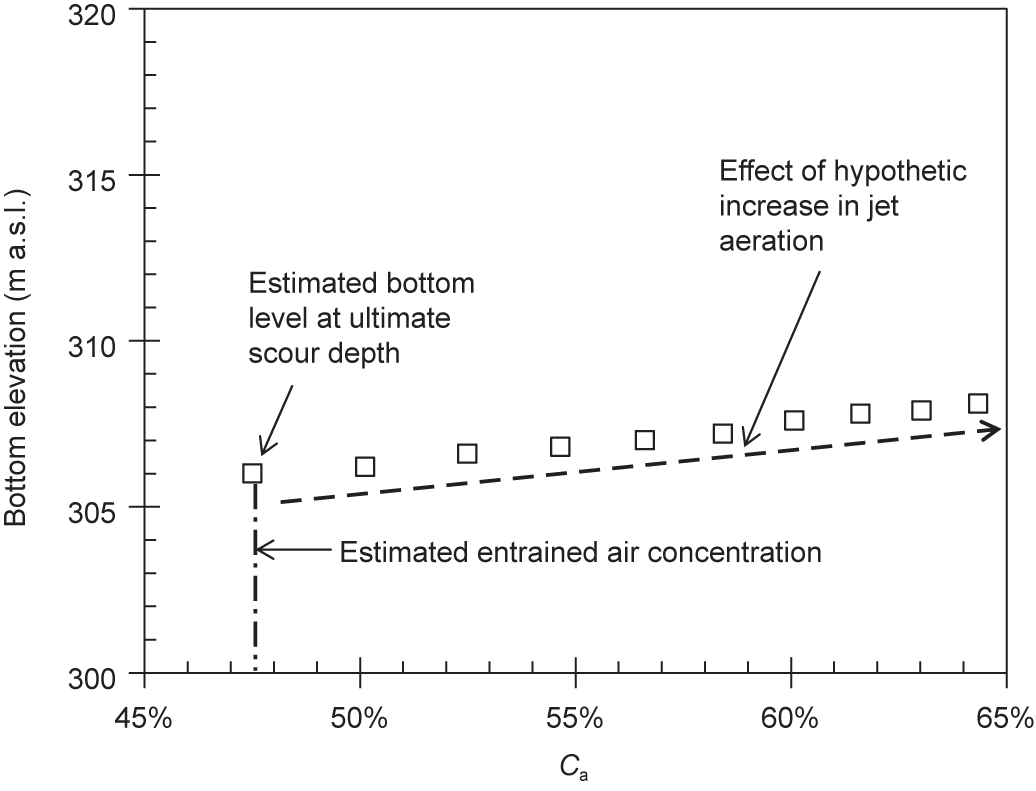
Fig. 9
References
[ 1 ] Bollaert E, Schleiss A. Scour of rock due to the impact of plunging high velocity jets Part I: a state-of-the-art review. J Hydraul Res 2003;41(5):451–64 link1
[ 2 ] Bollaert E. Transient water pressures in joints and formation of rock scour due to high-velocity jet impact [EPFL PhD thesis n°2548 and LCH communication n°13]. Lausanne: Ecole polytechnique fédérale de Lausanne; 2002.
[ 3 ] Bollaert E, Schleiss A. Physically based model for evaluation of rock scour due to high-velocity jet impact. J Hydraul Eng 2005;131(3):153–65 link1
[ 4 ] Manso PA. The influence of pool geometry and induced flow patterns in rock scour by high-velocity plunging jets [EPFL PhD thesis n°3430 and LCH communication n°25]. Lausanne: Ecole polytechnique fédérale de Lausanne; 2006.
[ 5 ] Manso PA, Bollaert E, Schleiss A. Influence of plunge pool geometry on high-velocity jet impact pressures and pressure propagation inside fissured rock media. J Hydraul Eng 2009;135(10):783–92 link1
[ 6 ] Duarte R. Influence of air entrainment on rock scour development and block stability in plunge pools [EPFL PhD thesis n°6195 and LCH communication n°59]. Lausanne: Ecole polytechnique fédérale de Lausanne; 2014.
[ 7 ] Duarte R, Schleiss A, Pinheiro A. Influence of jet aeration on pressures around a block embedded in a plunge pool bottom. Environ Fluid Mech 2015;15(3):673–93 link1
[ 8 ] Duarte R, Schleiss A, Pinheiro A. Effect of pool confinement on pressures around a block impacted by plunging aerated jets. Can J Civil Eng 2016;43(3):201–10 link1
[ 9 ] Duarte R, Pinheiro A, Schleiss A. Dynamic response of an embedded block impacted by aerated high-velocity jets. J Hydraul Res 2016;54(4):399–409 link1
[10] Ervine DA, Falvey HT, Withers W. Pressure fluctuations on plunge pool floors. J Hydraul Res 1997;35(2):257–79 link1
[11] Beltaos S, Rajaratnam N. Impingement of axisymmetric developing jets. J Hydraul Res 1977;15(4):311–26 link1
[12] Manso PA, Fiorotto V, Bollaert E, Schleiss A. Discussion of “Effect of jet air content on plunge pool scour” by Stefano Canepa and Willi H. Hager. J Hydraul Eng 2004;130(11):1128–30 link1
[13] Ervine DA, Falvey HT. Behaviour of turbulent water jets in the atmosphere and in plunge pools. Proc Inst Civil Eng 1987;83(1):295–314 link1
[14] Noret C, Girard JC, Munodawafa MC, Mazvidza DZ. Kariba dam on Zambezi River: stabilizing the natural plunge pool. La Houille Blanche 2013;(1):34–41. French link1
[15] Tapfuma V, Mazvidza D, Goguel B, Molyneux JD. Kariba Dam safety monitoring and resulting maintenance works. In: Proceedings of the 18th ICOLD Congress; 1994 Nov 7–11; Durban, South Africa. Paris: International Commission on Large Dams; 1994. p. 1445–64.
[16] Bollaert E, Duarte R, Pfister M, Schleiss A, Mazvidza D. Physical and numerical model study investigating plunge pool scour at Kariba Dam. In: Proceedings of the 24th Congress of CIGB–CICOLD; 2012 Jun 2–8; Kyoto, Japan. Paris: International Commission on Large Dams; 2012. p. 241–8.
[17] Bollaert E, Munodawafa MC, Mazvidza DZ. Kariba Dam plunge pool scour: quasi-3D numerical predictions. La Houille Blanche 2013;(1):42–9 link1
[18] Asadollahi P, Tonon F, Federspiel MPEA, Schleiss A. Prediction of rock block stability and scour depth in plunge pools. J Hydraul Res 2011;49(6):750–6 link1
[19] Federspiel MPEA. Response of an embedded block impacted by high-velocity jets [EPFL PhD thesis n°5160 and LCH communication n°47]. Lausanne: Ecole polytechnique fédérale de Lausanne; 2011.
[20] Mason PJ, Arumugam K. Free jet scour below dams and flip buckets. J Hydraul Eng 1985;111(2):220–35 link1
[21] Bellin A, Fiorotto V. Direct dynamic force measurement on slabs in spillway stilling basins. J Hydraul Eng 1995;121(10):686–C93 link1
[22] Fiorotto V, Rinaldo A. Turbulent pressure fluctuations under hydraulic jumps. J Hydraul Res 1992;30(4):499–520 link1











 京公网安备 11010502051620号
京公网安备 11010502051620号




