
2018, Volume 4, Issue 2
Engineering >> 2018, Volume 4, Issue 2 doi: 10.1016/j.eng.2017.09.002
A Realization Method for Transforming a Topology Optimization Design into Additive Manufacturing Structures
State Key Laboratory of Structural Analysis for Industrial Equipment, Dalian University of Technology, Dalian, Liaoning 116024, China
Next Previous
Abstract
Topology optimization is a powerful design approach that is used to determine the optimal topology in order to obtain the desired functional performance. It has been widely used to improve structural performance in engineering fields such as in the aerospace and automobile industries. However, some gaps still exist between topology optimization and engineering application, which significantly hinder the application of topology optimization. One of these gaps is how to interpret topology results, especially those obtained using the density framework, into parametric computer-aided design (CAD) models that are ready for subsequent shape optimization and manufacturing. In this paper, a new method for interpreting topology optimization results into stereolithography (STL) models and parametric CAD models is proposed. First, we extract the skeleton of the topology optimization result in order to ensure shape preservation and use a filtering method to ensure characteristics preservation. After this process, the distribution of the nodes in the boundary of the topology optimization result is denser, which will benefit the subsequent curve fitting. Using the curvature and the derivative of curvature of the uniform B-spline curve, an adaptive B-spline fitting method is proposed in order to obtain a parametric CAD model with the fewest control points meeting the requirement of the fitting error. A case study is presented to provide a detailed description of the proposed method, and two more examples are shown to demonstrate the validity and versatility of the proposed method.
Keywords
Topology optimization ; Additive manufacturing ; Characteristics preservation ; Adaptive fitting ; Shape optimization
Figures
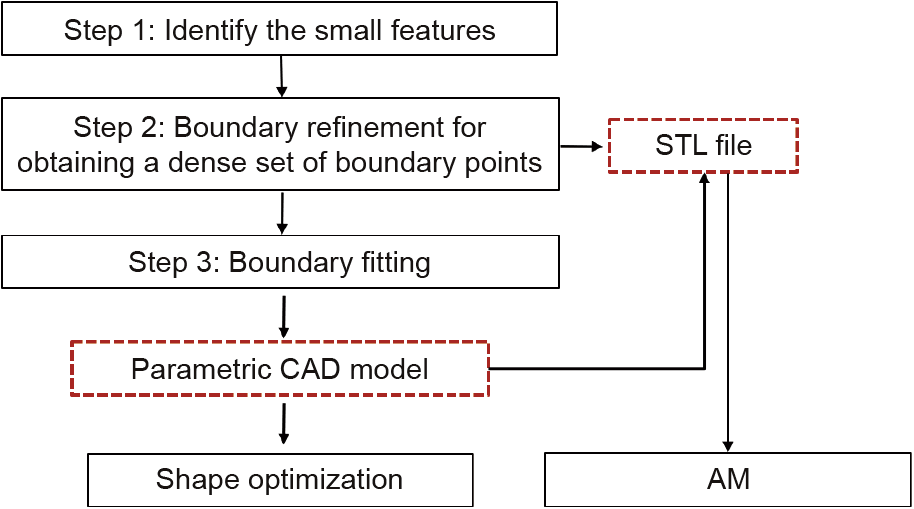
Fig. 1
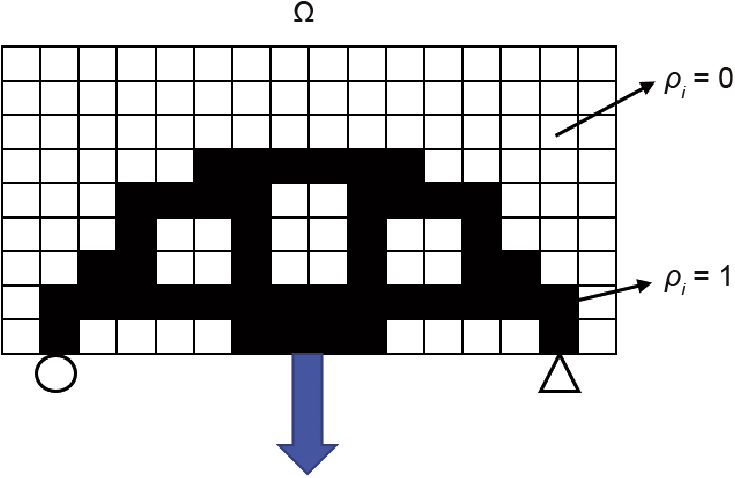
Fig. 2

Fig. 3
Fig. 4
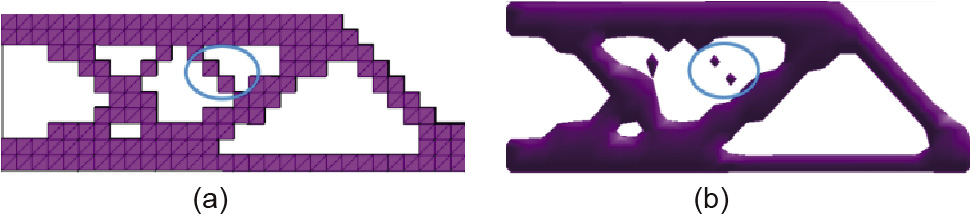
Fig. 5

Fig. 6
Fig. 7
Fig. 8
Fig. 9
Fig. 10
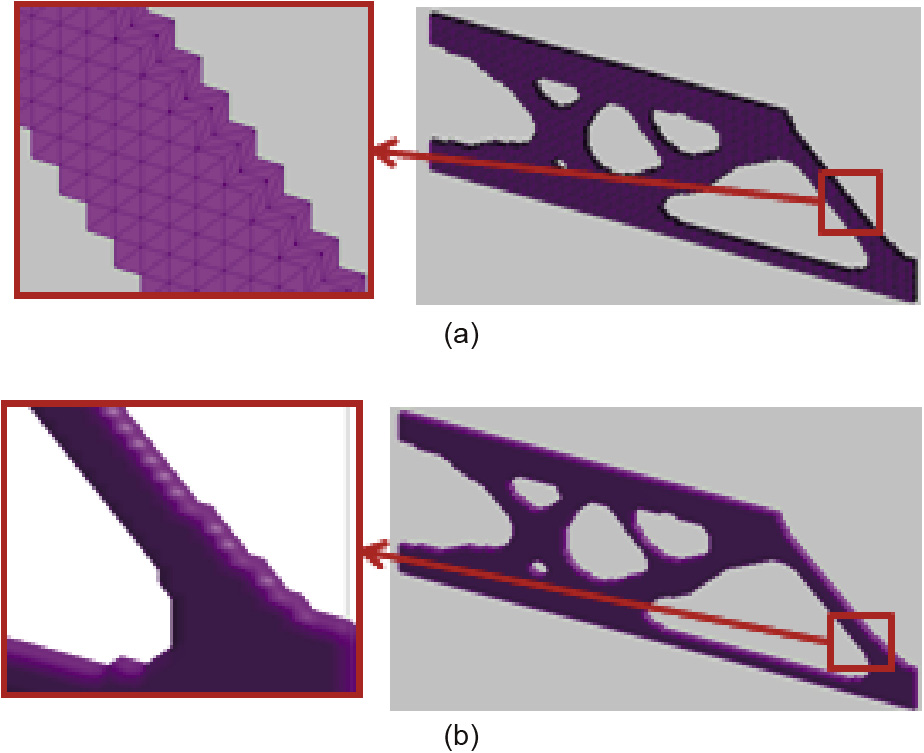
Fig. 11
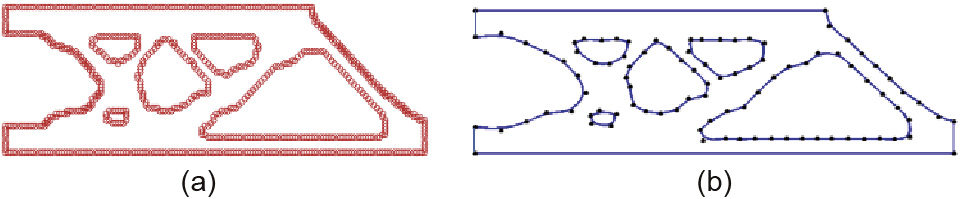
Fig. 12

Fig. 13
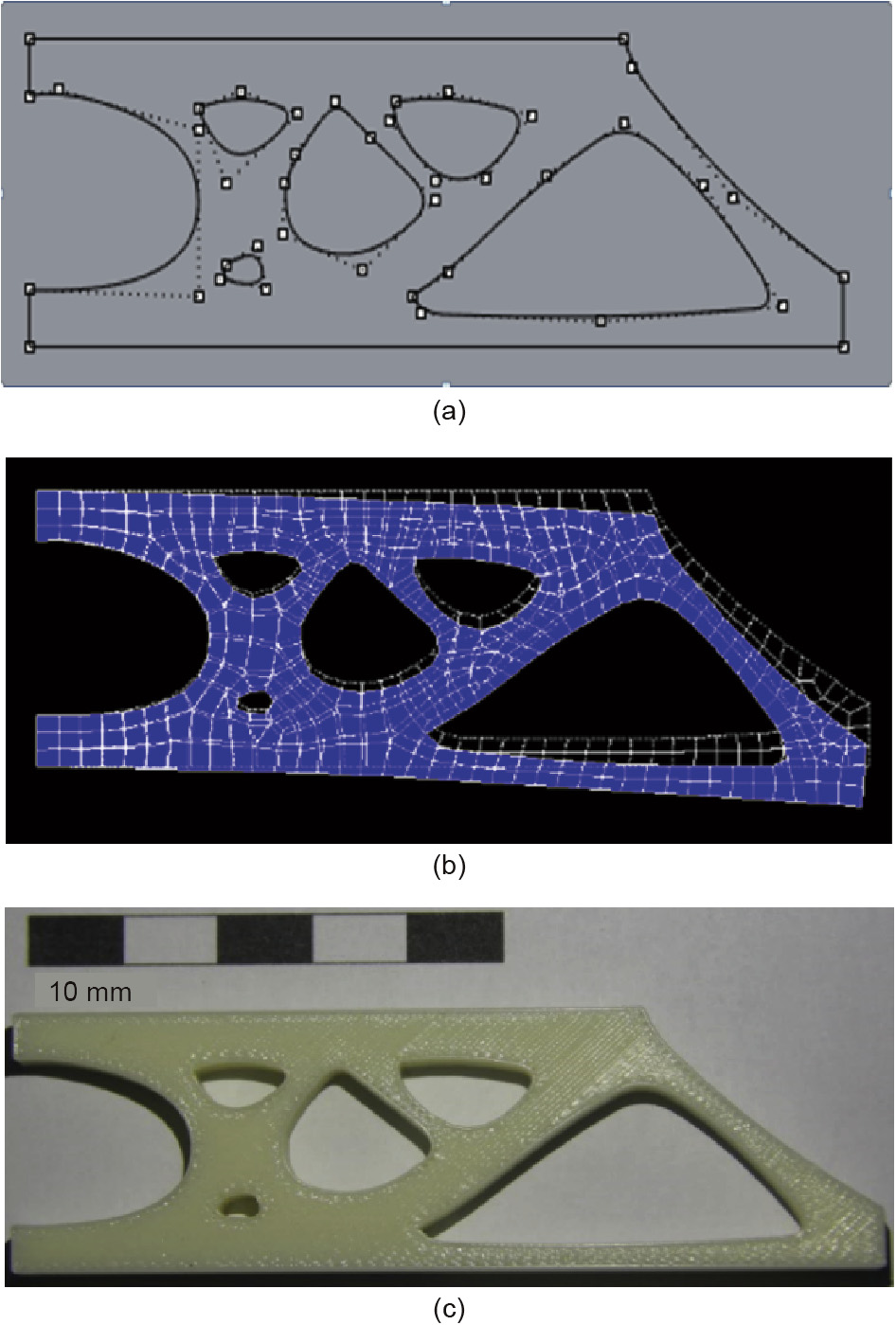
Fig. 14
Fig. 15
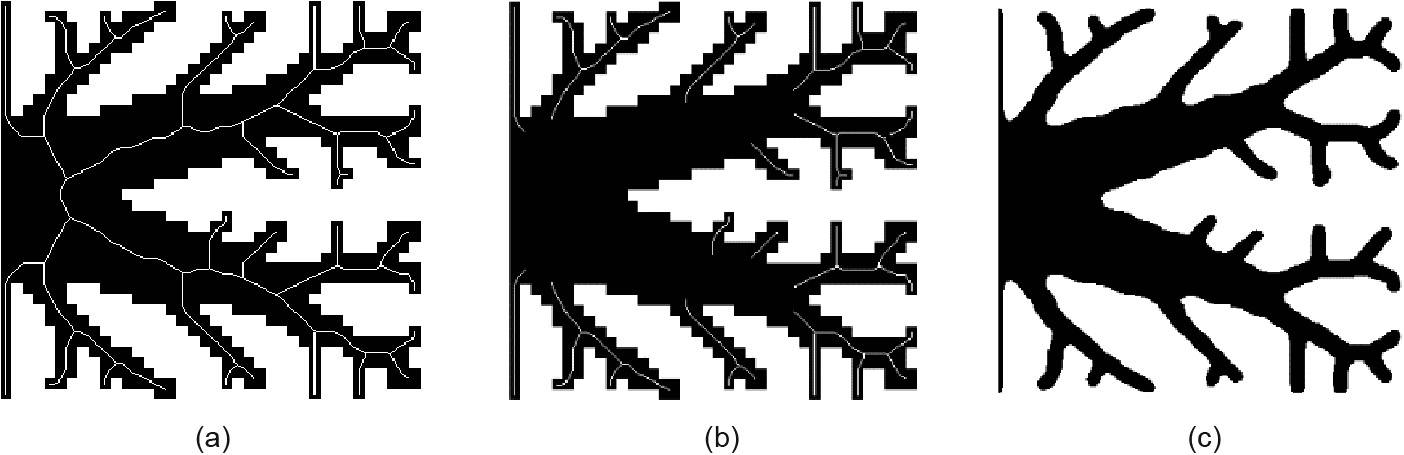
Fig. 16
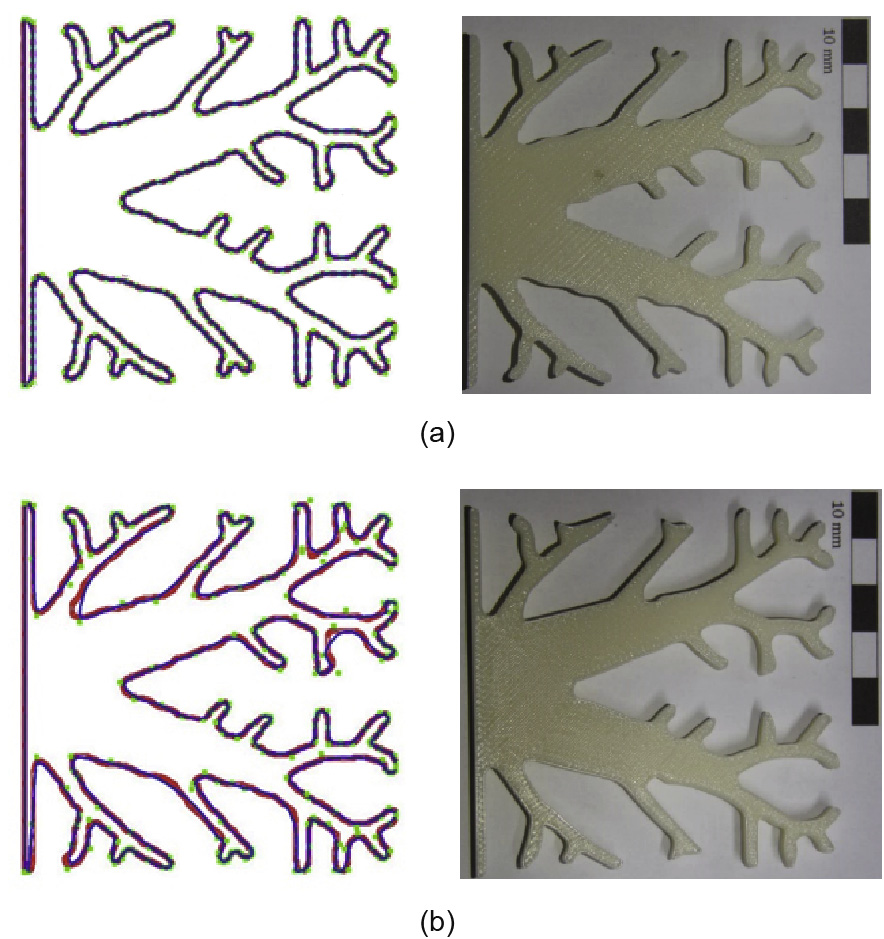
Fig. 17
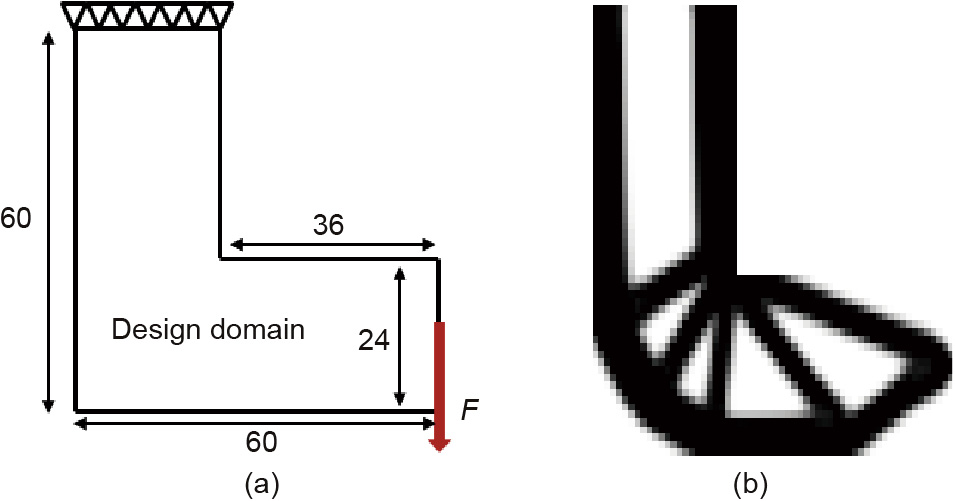
Fig. 18
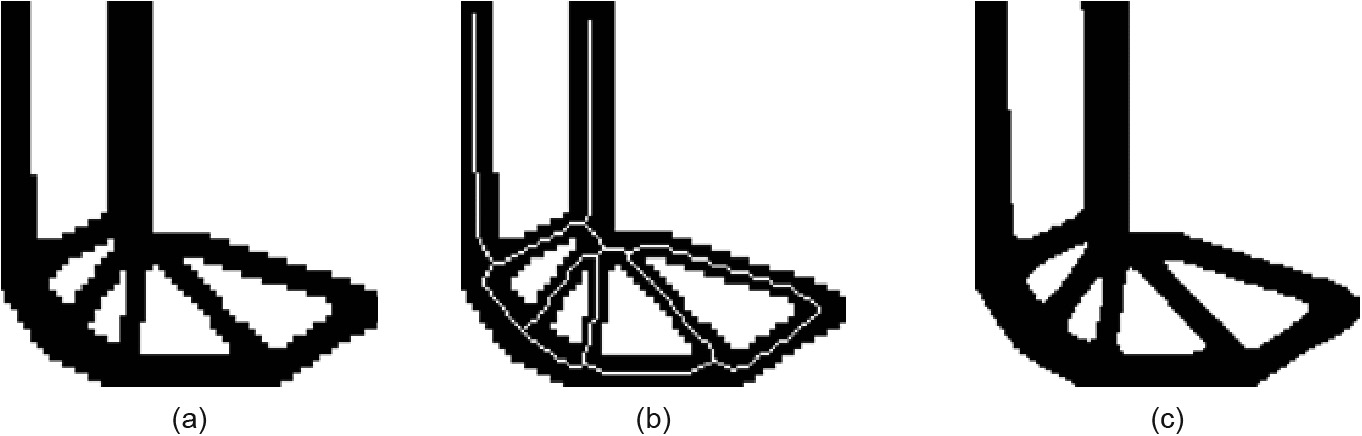
Fig. 19
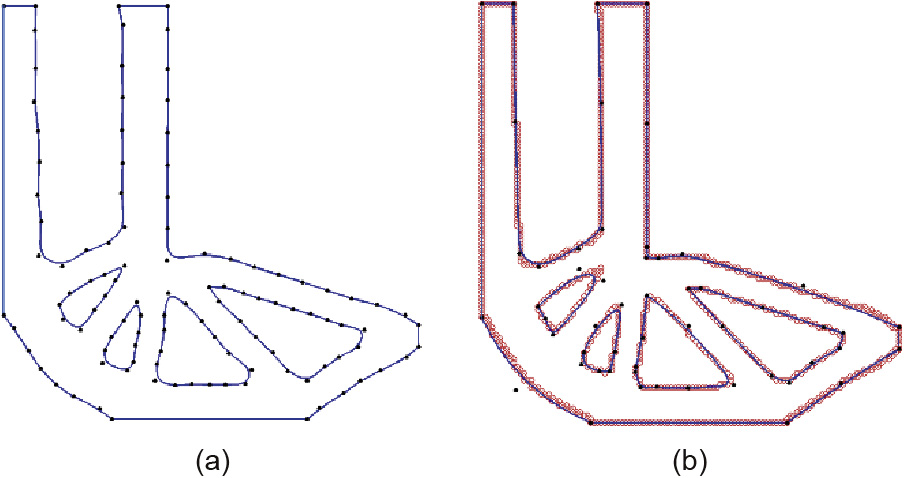
Fig. 20
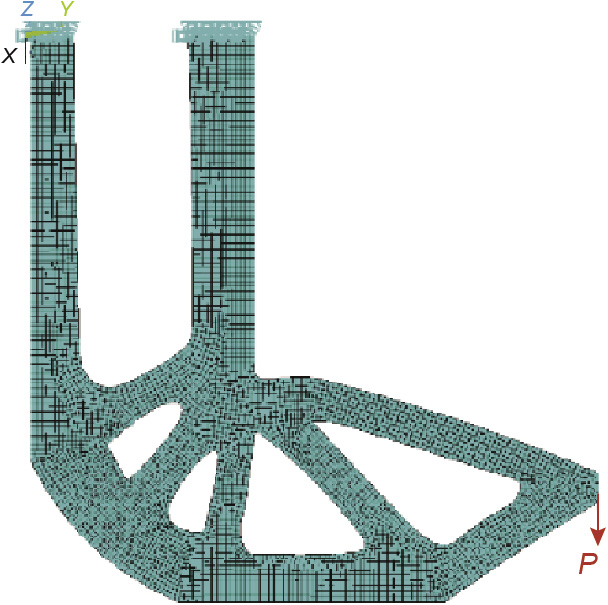
Fig. 21
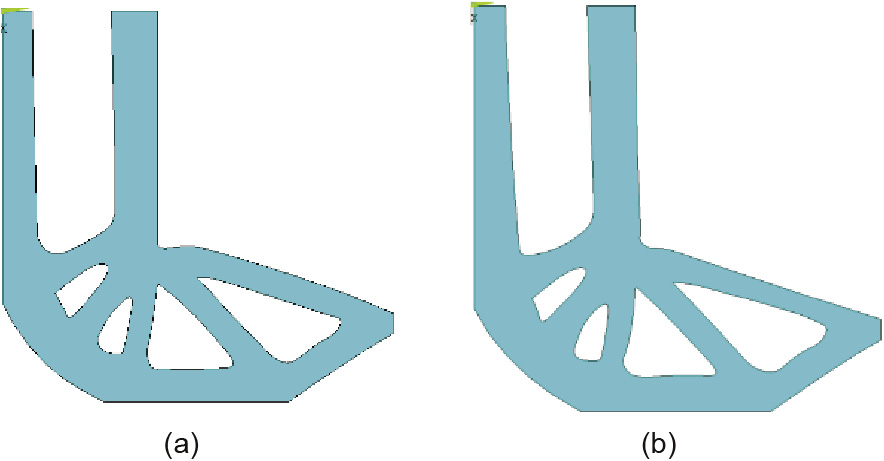
Fig. 22

Fig. 23
References
[ 1 ] Zhu J, Zhang W, Beckers P. Integrated layout design of multi-component system. Int J Numer Methods Eng 2009;78(6):631–51. link1
[ 2 ] Liu S, Hu R, Li Q, Zhou P, Dong Z, Kang R. Topology optimization-based lightweight primary mirror design of a large-aperture space telescope. Appl Opt 2014;53(35):8318–25. link1
[ 3 ] Zhou M, Rozvany GIN. The COC algorithm, Part II: topological, geometrical and generalized shape optimization. Comput Methods Appl Mech Eng 1991; 89(1–3):309–36. link1
[ 4 ] Bendsøe MP, Sigmund O. Material interpolation schemes in topology optimization. Arch Appl Mech 1999;69(9–10):635–54. link1
[ 5 ] Allaire G, Jouve F, Toader AM. A level-set method for shape optimization. C R Math 2002;334(12):1125–30. link1
[ 6 ] Wang MY, Wang X, Guo D. A level set method for structural topology optimization. Comput Methods Appl Mech Eng 2003;192(1–2):227–46. link1
[ 7 ] Xie YM, Steven GP. A simple evolutionary procedure for structural optimization. Comput Struct 1993;49(5):885–96. link1
[ 8 ] Sigmund O, Maute K. Topology optimization approaches. Struct Multidiscip Optim 2013;48(6):1031–55. link1
[ 9 ] Gibson I, Rosen DW, Stucker B. Additive manufacturing technologies: rapid prototyping to direct digital manufacturing. Boston: Springer; 2010.
[10] Murr LE, Gaytan SM, Ramirez DA, Martinez E, Hernandez J, Amato KN, et al. Metal fabrication by additive manufacturing using laser and electron beam melting technologies. J Mater Sci Technol 2012;28(1):1–14. link1
[11] Turner BN, Strong R, Gold SA. A review of melt extrusion additive manufacturing processes: I. Process design and modeling. Rapid Prototyp J 2014;20:192–204. link1
[12] Hopkinson N, Hague RJM, Dickens PM, editors. Rapid manufacturing: an industrial revolution for the digital age. Chichester: John Wiley & Sons, Ltd.; 2006. link1
[13] Han P. Additive design and manufacturing of jet engine parts. Engineering 2017;3(5):648–52. link1
[14] Lu B, Li D, Tian X. Development trends in additive manufacturing and 3D printing. Engineering 2015;1(1):85–9. link1
[15] An J, Teoh JEM, Suntornnond R, Chua CK. Design and 3D printing of scaffolds and tissues. Engineering 2015;1(2):261–8. link1
[16] Lee AY, An J, Chua CK. Two-way 4D printing: a review on the reversibility of 3D-printed shape memory. Engineering 2017;3(5):663–74. link1
[17] Liu S, Li Q, Chen W, Tong L, Cheng G. An identification method for enclosed voids restriction in manufacturability design for additive manufacturing structures. Front Mech Eng 2015;10(2):126–37. link1
[18] Li Q, Chen W, Liu S, Tong L. Structural topology optimization considering connectivity constraint. Struct Multidiscip Optim 2016;54(4):971–84. link1
[19] Wang K, Ho CC, Zhang C, Wang B. A review on the 3D printing of functional structures for medical phantoms and regenerated tissue and organ applications. Engineering 2017;3(5):653–62. link1
[20] Cleveland RB, Cleveland WS, McRae JE, Terpenning I. STL: a seasonal-trend decomposition procedure based on loess. J Off Stat 1990;6(1):3–33. link1
[21] Liewald MH. Initial graphics exchange specification: successes and evolution. Comput Graph 1985;9(1):47–50. link1
[22] Kumar AV, Gossard DC. Synthesis of optimal shape and topology of structures. J Mech Des 1996;118(1):68–74. link1
[23] Hsu YL, Hsu MS, Chen CT. Interpreting results from topology optimization using density contours. Comput Struct 2001;79(10):1049–58. link1
[24] Hsu MH, Hsu YL. Interpreting three-dimensional structural topology optimization results. Comput Struct 2005;83(4–5):327–37. link1
[25] Li C, Kim IY, Jeswiet J. Conceptual and detailed design of an automotive engine cradle by using topology, shape, and size optimization. Struct Multidiscip Optim 2015;51(2):547–64. link1
[26] Larsen S, Jensen CG. Converting topology optimization results into parametric CAD models. Comput Aided Des Appl 2009;6(3):407–18. link1
[27] Lin CY, Chao LS. Automated image interpretation for integrated topology and shape optimization. Struct Multidiscip Optim 2000;20(2):125–37. link1
[28] Zegard T, Paulino GH. Bridging topology optimization and additive manufacturing. Struct Multidiscip Optim 2016;53(1):175–92. link1
[29] Yildiz AR, Öztürk N, Kaya N, Öztürk F. Integrated optimal topology design and shape optimization using neural networks. Struct Multidiscip Optim 2003;25 (4):251–60. link1
[30] Marsan AL, Dutta D. Construction of a surface model and layered manufacturing data from 3D homogenization output. J Mech Des 1996;118 (3):412–8. link1
[31] Tang PS, Chang KH. Integration of topology and shape optimization for design of structural components. Struct Multidiscip Optim 2001;22(1):65–82. link1
[32] Papalambros PY, Chirehdast M. An integrated environment for structural configuration design. J Eng Des 1990;1(1):73–96. link1
[33] Chang KH, Tang PS. Integration of design and manufacturing for structural shape optimization. Adv Eng Softw 2001;32(7):555–67. link1
[34] Koguchi A, Kikuchi N. A surface reconstruction algorithm for topology optimization. Eng Comput 2006;22(1):1–10. link1
[35] Chacón JM, Bellido JC, Donoso A. Integration of topology optimized designs into CAD/CAM via an IGES translator. Struct Multidiscip Optim 2014;50 (6):1115–25. link1
[36] Yi G, Kim NH. Identifying boundaries of topology optimization results using basic parametric features. Struct Multidiscip Optim 2017;55(5):1641–54. link1
[37] Bendsøe MP, Kikuchi N. Generating optimal topologies in structural design using a homogenization method. Comput Methods Appl Mech Eng 1988;71 (2):197–224. link1
[38] Bendsøe MP. Optimal shape design as a material distribution problem. Struct Optim 1989;1(4):193–202. link1
[39] Cheng KT, Olhoff N. An investigation concerning optimal design of solid elastic plates. Int J Solids Struct 1981;17(3):305–23. link1
[40] Svanberg K. The method of moving asymptotes—a new method for structural optimization. Int J Numer Methods Eng 1987;24(2):359–73. link1
[41] Sigmund O. A 99 line topology optimization code written in MATLAB. Struct Multidiscip Optim 2001;21(2):120–7. link1
[42] Andreassen E, Clausen A, Schevenels M, Lazarov BS, Sigmund O. Efficient topology optimization in MATLAB using 88 lines of code. Struct Multidiscip Optim 2011;43(1):1–16. link1
[43] Liu K, Tovar A. An efficient 3D topology optimization code written in MATLAB. Struct Multidiscip Optim 2014;50(6):1175–96. link1











 京公网安备 11010502051620号
京公网安备 11010502051620号




