
2019, Volume 5, Issue 3
Engineering >> 2019, Volume 5, Issue 3 doi: 10.1016/j.eng.2018.11.033
A Micro Peristaltic Pump Using an Optically Controllable Bioactuator
a Department of Mechanical Engineering, Osaka University, Osaka 565-0871, Japan
b Department of Applied Biological Sciences, Tokyo University of Agriculture and Technology, Tokyo 183-8509, Japan
Next Previous
Abstract
Peristalsis is widely seen in nature, as this pumping action is important in digestive systems for conveying sustenance to every corner of the body. In this paper, we propose a muscle-powered tubular micro pump that provides peristaltic transport. We utilized Drosophila melanogaster larvae that express channelrhodopsin-2 (ChR2) on the cell membrane of skeletal muscles to obtain light-responsive muscle tissues. The larvae were forced to contract with blue light stimulation. While changing the speed of the propagating light stimulation, we observed displacement on the surface of the contractile muscle tissues. We obtained peristaltic pumps from the larvae by dissecting them into tubular structures. The average inner diameter of the tubular structures was about 400 μm and the average outer diameter was about 750 μm. Contractions of this tubular structure could be controlled with the same blue light stimulation. To make the inner flow visible, we placed microbeads into the peristaltic pump, and thus determined that the pump could transport microbeads at a speed of 120 μm·s−1.
Keywords
Tubular structure ; Bioactuator ; Peristaltic pump ; Optogenetics ; Biomaterial ; Muscle actuator ; Tissue engineered ; Soft robot
Figures

Fig. 1
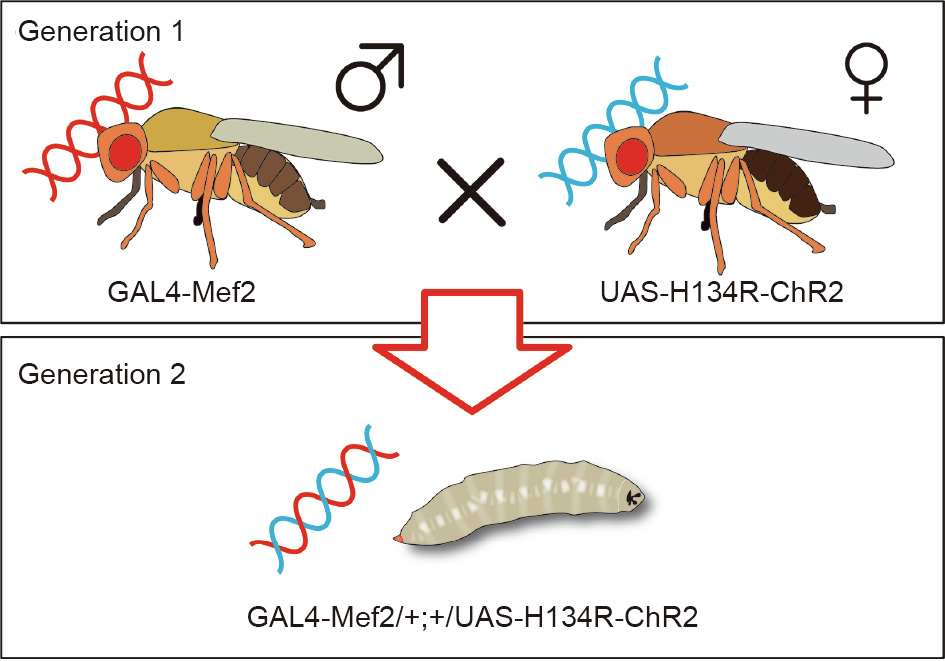
Fig. 2

Fig. 3
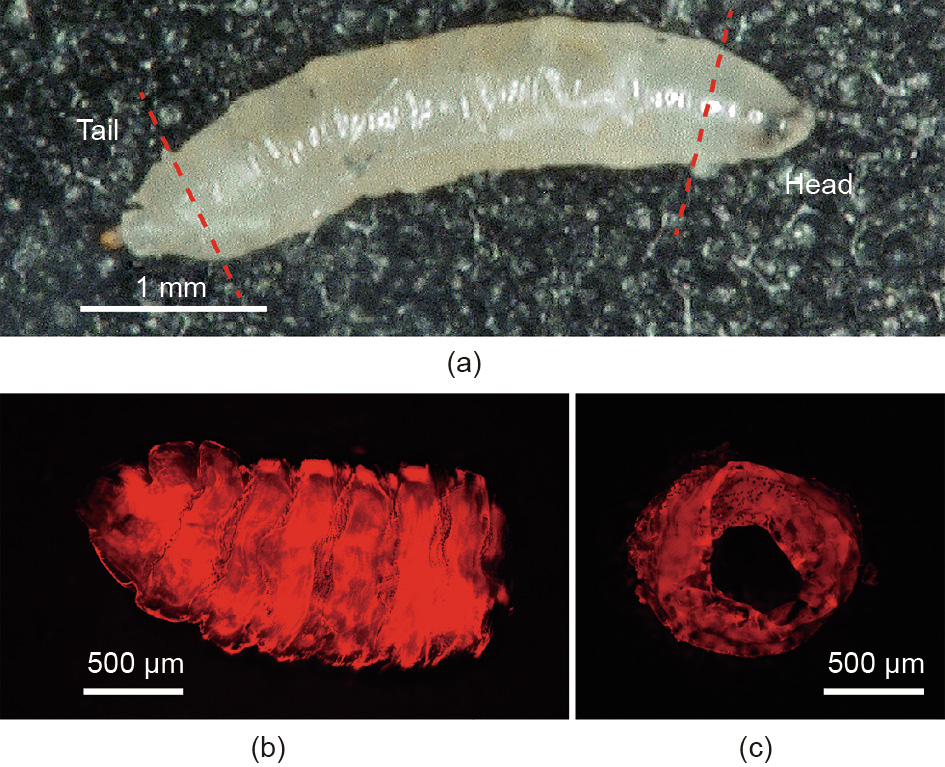
Fig. 4

Fig. 5

Fig. 6

Fig. 7
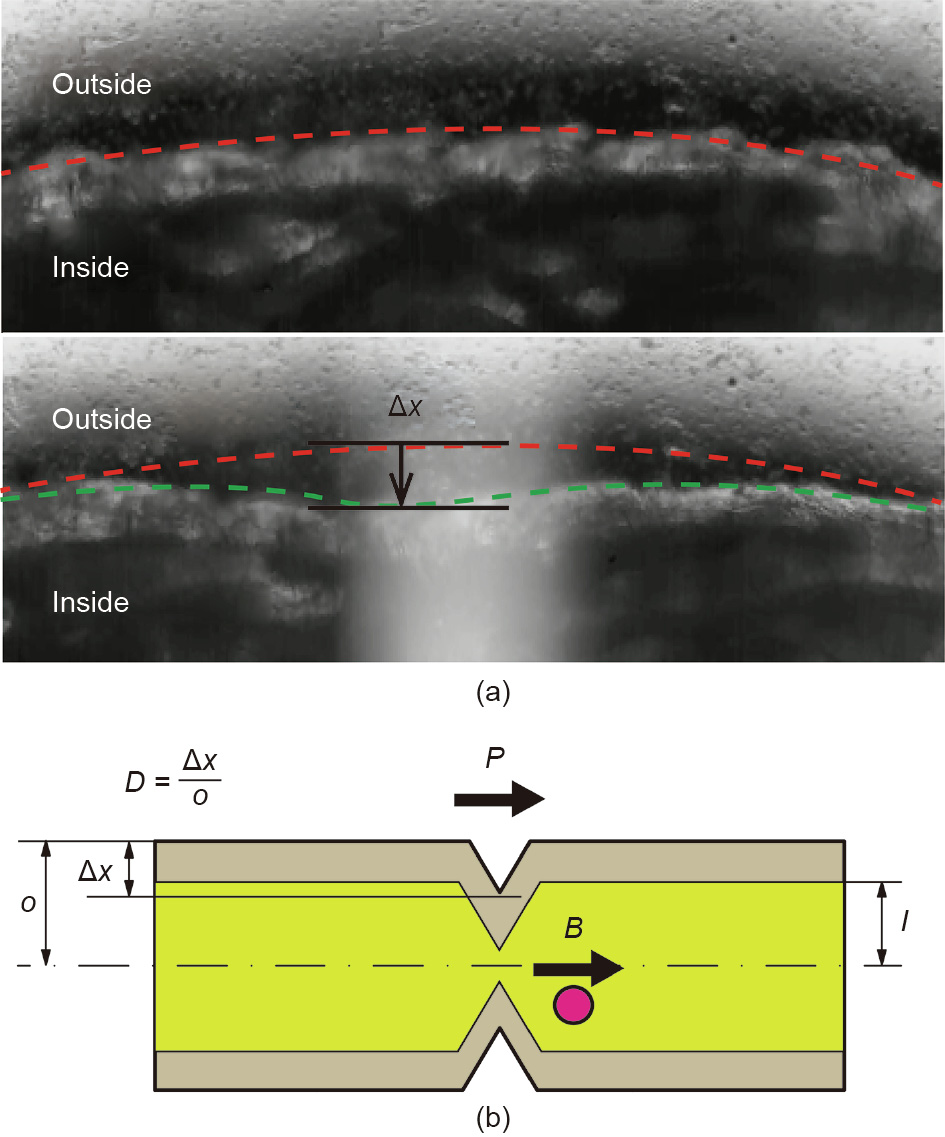
Fig. 8

Fig. 9
Fig. 10

Fig. 11
References
[ 1 ] Tanaka Y, Morishima K, Shimizu T, Kikuchi A, Yamato M, Okano T, et al. An actuated pump on-chip powered by cultured cardiomyocytes. Lab Chip 2006;6 (3):362–8. link1
[ 2 ] Akiyama Y, Sakuma T, Funakoshi K, Hoshino T, Iwabuchi K, Morishima K. Atmospheric-operable bioactuator powered by insect muscle packaged with medium. Lab Chip 2013;13(24):4870–80. link1
[ 3 ] Nawroth JC, Lee H, Feinberg AW, Ripplinger CM, McCain ML, Grosberg A, et al. A tissue-engineered jellyfish with biomimetic propulsion. Nat Biotechnol 2012;30(8):792–7. link1
[ 4 ] Chan V, Park K, Collens MB, Kong H, Saif TA, Bashir R. Development of miniaturized walking biological machines. Sci Rep 2012;2:857. link1
[ 5 ] Chan V, Jeong JH, Bajaj P, Collens M, Saif T, Kong H, et al. Multi-material biofabrication of hydrogel cantilevers and actuators with stereolithography. Lab Chip 2012;12(1):88–98. link1
[ 6 ] Kim J, Park J, Yang S, Baek J, Kim B, Lee SH, et al. Establishment of a fabrication method for a long-term actuated hybrid cell robot. Lab Chip 2007;7 (11):1504–8. link1
[ 7 ] Xi J, Schmidt JJ, Montemagno CD. Self-assembled microdevices driven by muscle. Nat Mater 2005;4(2):180–4. link1
[ 8 ] Fujita H, Shimizu K, Nagamori E. Novel method for measuring active tension generation by C2C12 myotube using UV-crosslinked collagen film. Biotechnol Bioeng 2010;106(3):482–9. link1
[ 9 ] Morimoto Y, Kato-Negishi M, Onoe H, Takeuchi S. Three-dimensional neuronmuscle constructs with neuromuscular junctions. Biomaterials 2013;34 (37):9413–9. link1
[10] Caldwell DG. Natural and artificial muscle elements as robot actuators. Mechatronics 1993;3(3):269–83. link1
[11] Hunter IW, Lafontaine S. A comparison of muscle with artificial actuators. In: Proceedings of Technical Digest IEEE Solid-State Sensor and Actuator Workshop; 1992 Jun 22–25; Hilton Head Island, SC, USA. Piscataway: IEEE; 1992. p. 178–85. link1
[12] Akiyama Y, Odaira K, Sakiyama K, Hoshino T, Iwabuchi K, Morishima K. Rapidly-moving insect muscle-powered microrobot and its chemical acceleration. Biomed Microdev 2012;14(6):979–86. link1
[13] Akiyama Y, Iwabuchi K, Furukawa Y, Morishima K. Electrical stimulation of cultured lepidopteran dorsal vessel tissue: an experiment for development of bioactuators. In Vitro Cell Dev Biol-Animal 2010;46:411–5. link1
[14] Sakar MS, Neal D, Boudou T, Borochin MA, Li Y, Weiss R, et al. Formation and optogenetic control of engineered 3D skeletal muscle bioactuators. Lab Chip 2012;12(23):4976–85. link1
[15] Beh SP, Hirooka M, Hoshino T, Hoshino K, Akiyama Y, Tsujimura H, et al. Visual servo of muscle-powered optogenetic bioactuator. In: Proceedings of 2013 Transducers & Eurosensors XXVII: the 17th International Conference on Solid-State Sensors, Actuators and Microsystems; 2013 Jun 16–20; Barcelona, Spain. Piscataway: IEEE; 2013. p. 1444–7. link1
[16] Yamatsuta E, Beh SP, Morishima K. Living peristaltic micro conveyor tube of optogenetically controllable bioactuator. In: Proceedings of the 18th International Conference on Solid-State Sensors, Actuators and Microsystems; 2015 Jun 21–25; Anchorage, AK, USA. Piscataway: IEEE; 2015. p. 827–30. link1
[17] Park SJ, Gazzola M, Park KS, Park S, Di Santo V, Blevins EL, et al. Phototactic guidance of a tissue-engineered soft-robotic ray. Science 2016;353 (6295):158–62. link1
[18] Boyden ES, Zhang F, Bamberg E, Nagel G, Deisseroth K. Millisecond-timescale, genetically targeted optical control of neural activity. Nat Neurosci 2005;8 (9):1263–8. link1
[19] Zhang F, Aravanis AM, Adamantidis A, de Lecea L, Deisseroth K. Circuitbreakers: optical technologies for probing neural signals and systems. Nat Rev Neurosci 2007;8(8):577–81. Erratum in: Nat Rev Neurosci 2007;8(9):732. link1
[20] Shimizu M, Yawata S, Miyamoto K, Miyasaka K, Asano T, Yoshinobu T, et al. Toward biorobotic systems with muscle cell actuators. In: Proceedings of the 5th International Symposium on Adaptive Motion of Animals and Machines; 2011 Oct 11–14; Hyogo, Japan; 2011. p. 87–8.
[21] Asano T, Ishizuka T, Morishima K, Yawo H. Optogenetic induction of contractile ability in immature C2C12 myotubes. Sci Rep 2015;5:8317. link1
[22] Nakamura T, Iwanaga T. Locomotion strategy for a peristaltic crawling robot in a 2-dimensional space. In: Proceedings of 2008 IEEE International Conference on Robotics and Automation; 2008 May 19–23; Pasadena, CA, USA. Piscataway: IEEE; 2008. p. 238–43. link1
[23] Kishi T, Ikeuchi M, Nakamura T. Development of a peristaltic crawling inspection robot for 1-inch gas pipes with continuous elbows. In: Proceedings of 2013 IEEE/RSJ International Conference on Intelligent Robots and Systems; 2013 Nov 3–7; Tokyo, Japan. Piscataway: IEEE; 2013. p. 3297–302. link1
[24] Saga N, Nakamura T. Development of a peristaltic crawling robot using magnetic fluid on the basis of the locomotion mechanism of the earthworm. Smart Mater Struct 2004;13(3):566–9. link1
[25] Seok S, Onal CD, Wood R, Rus D, Kim S. Peristaltic locomotion with antagonistic actuators in soft robotics. In: Proceedings of 2010 IEEE International Conference on Robotics and Automation; 2010 May 3–7; Anchorage, AK, USA. Piscataway: IEEE; 2004. p. 3282–7. link1
[26] Menciassi A, Gorini S, Pernorio G, Dario P. A SMA actuated artificial earthworm. In: Proceedings of 2004 IEEE International Conference on Robotics and Automation; 2004 Apr 26–May 1; New Orleans, LA, USA. Piscataway: IEEE; 2004. p. 3282–7. link1
[27] Xie J, Shih J, Lin Q, Yang B, Tai YC. Surface micromachined electrostatically actuated micro peristaltic pump. Lab Chip 2004;4(5):495–501. link1
[28] Orfanos Z. Transgenic tools for Drosophila muscle research. J Muscle Res Cell Motil 2008;29(6–8):185–8. link1
[29] Pulver SR, Pashkovski SL, Hornstein NJ, Garrity PA, Griffith LC. Temporal dynamics of neuronal activation by channelrhodopsin-2 and TRPA1 determine behavioral output in Drosophila larvae. J Neurophysiol 2009;101(6):3075–88. link1
[30] Park J, Kim IC, Baek J, Cha M, Kim J, Park S, et al. Micro pumping with cardiomyocyte-polymer hybrid. Lab Chip 2007;7(10):1367–70. link1











 京公网安备 11010502051620号
京公网安备 11010502051620号




