
2023, Volume 20, Issue 1
Engineering >> 2023, Volume 20, Issue 1 doi: 10.1016/j.eng.2022.05.015
Watt Linkage–Based Legged Deployable Landing Mechanism for Reusable Launch Vehicle: Principle, Prototype Design, and Experimental Validation
a State Key Laboratory of Robotics and Systems, Harbin Institute of Technology, Harbin 150080, China
b Beijing Institute of Aerospace Systems Engineering, Beijing 100076, China
Next Previous
Abstract
The reusable launch vehicle (RLV) presents a new avenue for reducing cost of space transportation. The landing mechanism, which provides landing support and impact absorption, is a vital component of the RLV at final stage of recovery. This study proposes a novel legged deployable landing mechanism (LDLM) for RLV. The Watt-II six-bar mechanism is adopted to obtain the preferred configuration via the application of the linkage variation approach. To endow the proposed LDLM with advantages of large landing support region, lightweight, and reasonable linkage internal forces, a multi-objective optimization paradigm is developed. Furthermore, the optimal scale parameters for guiding the LDLM prototype design is obtained numerically using the non-dominated sorting genetic algorithm-II (NSGA-II) evolutionary algorithm. A fully-functional scaled RLV prototype is developed by integrating the gravity-governed deploying scheme to facilitate unfolding action to avoid full-range actuation, a dual-backup locking mechanism to enhance reliability of structure stiffening as fully deployed, and a shock absorber (SA) with multistage honeycomb to offer reliable shock absorbing performance. The experimental results demonstrate that the proposed LDLM is capable of providing rapid and smooth deployment (duration less than 1.5 s) with mild posture disturbance to the cabin (yaw and pitch fluctuations less than 6°). In addition, it provides satisfactory impact attenuation (acceleration peak less than 10g) in the 0.2 m freefall test, which makes the proposed LDLM a potential alternative for developing future RLV archetype.
SupplementaryMaterials
Figures
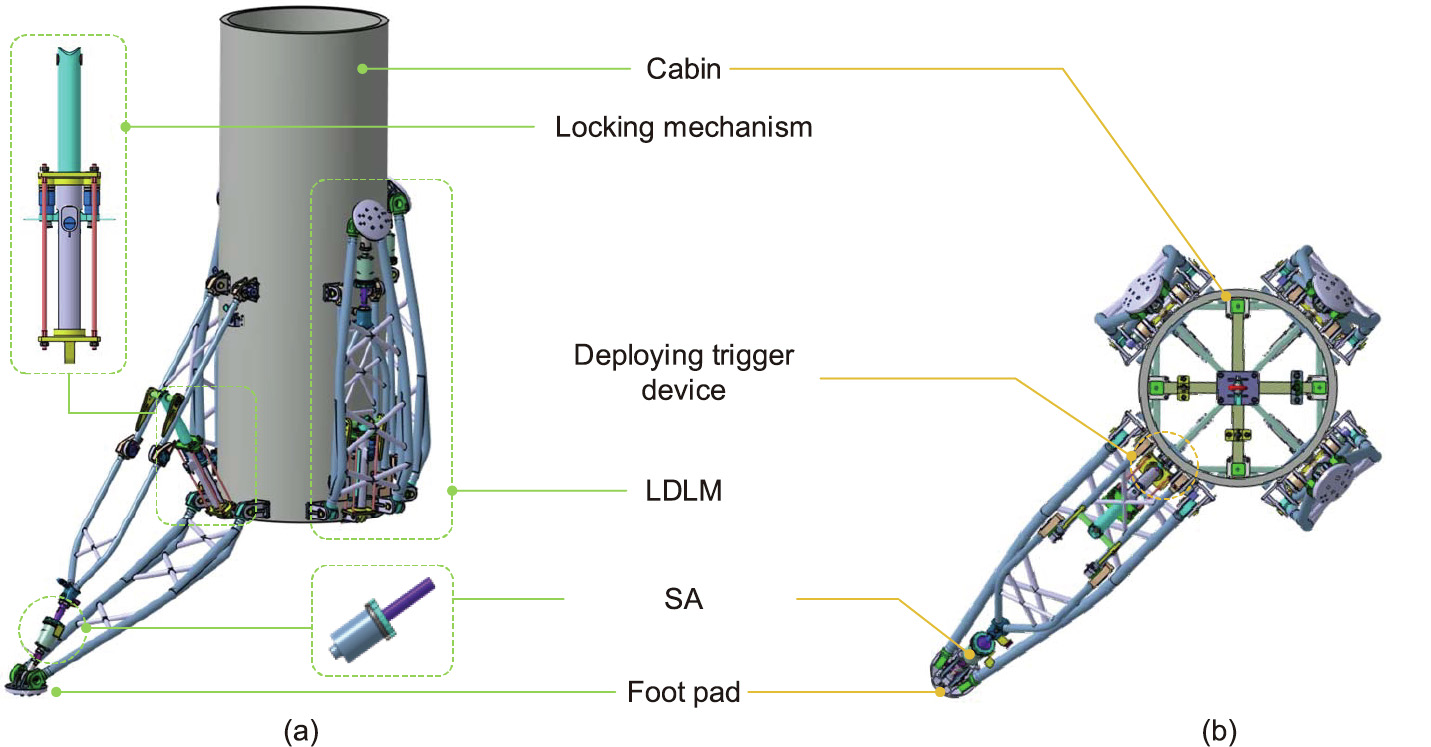
Fig. 1
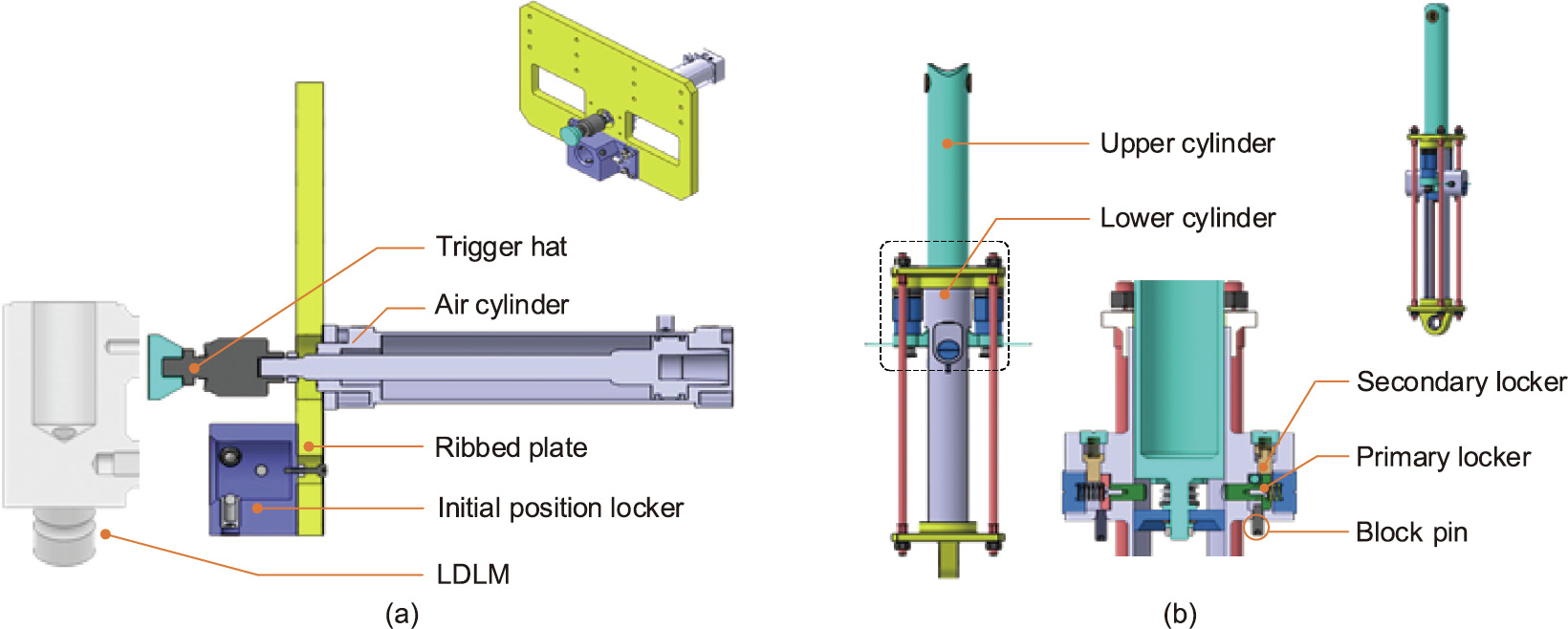
Fig. 2
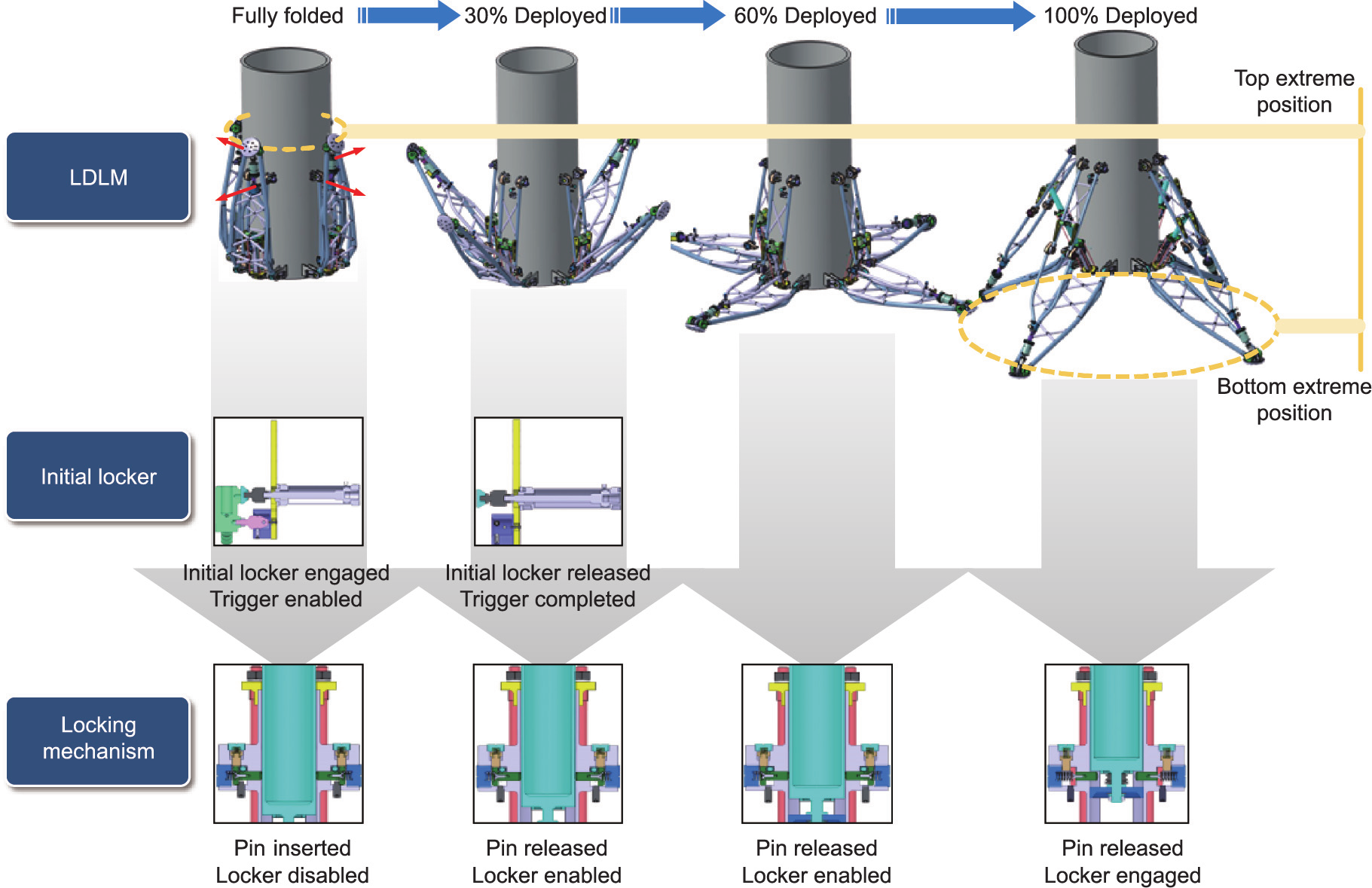
Fig. 3
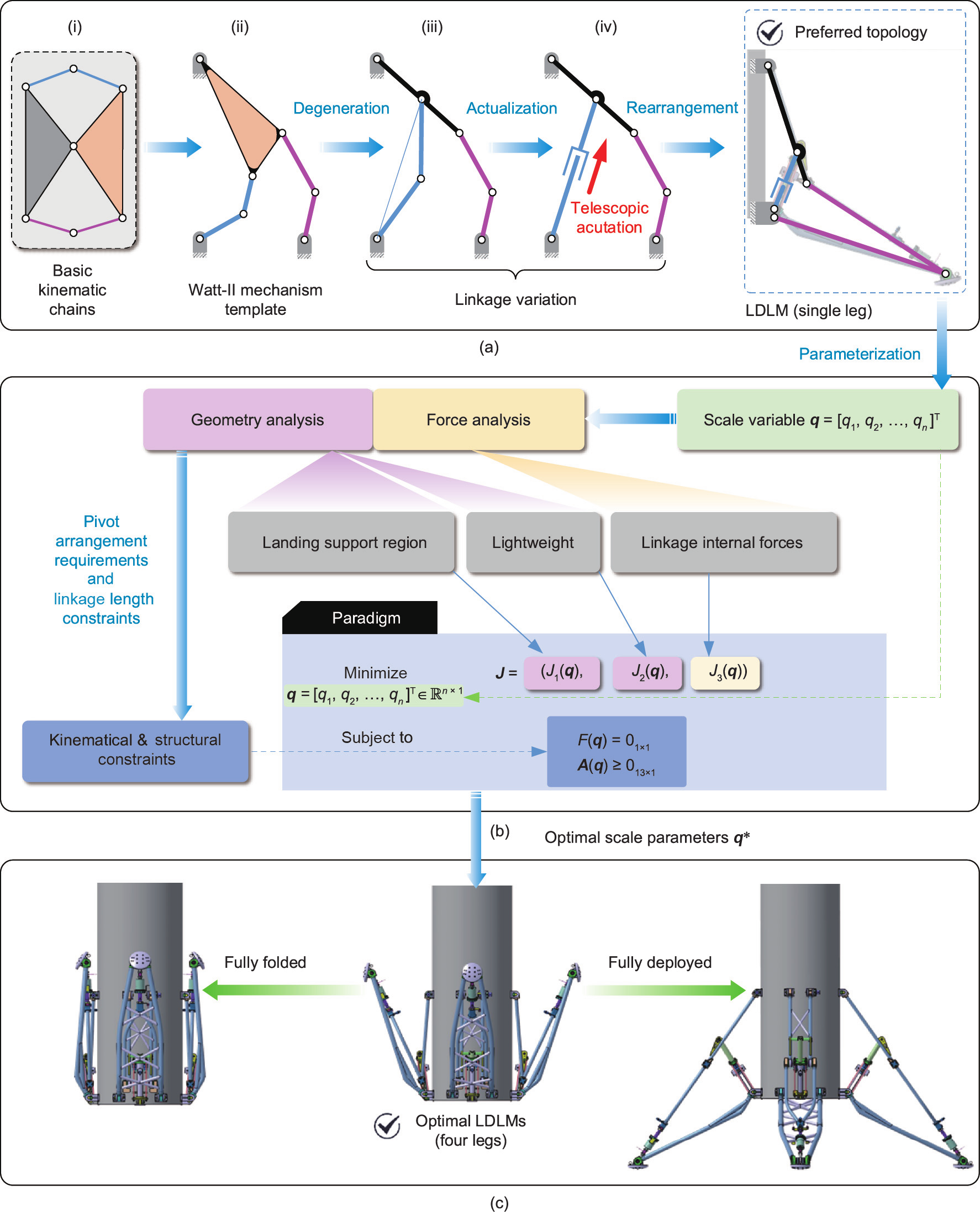
Fig. 4
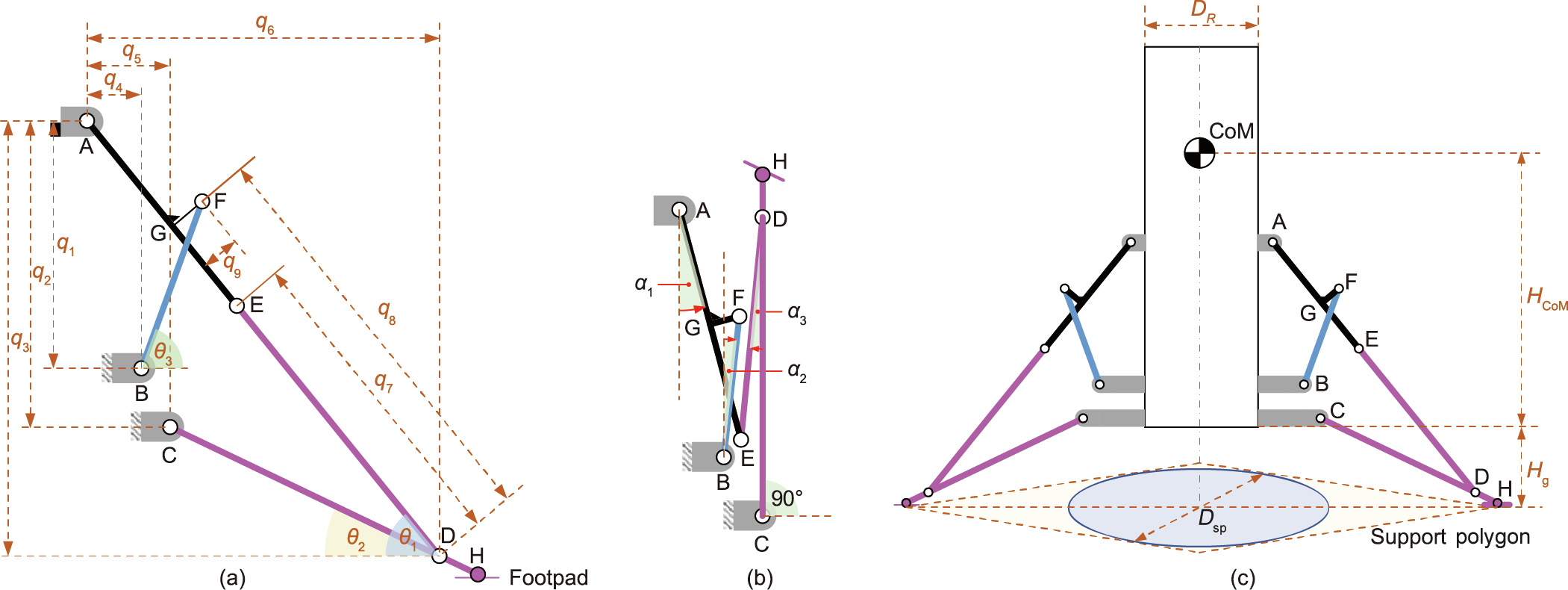
Fig. 5
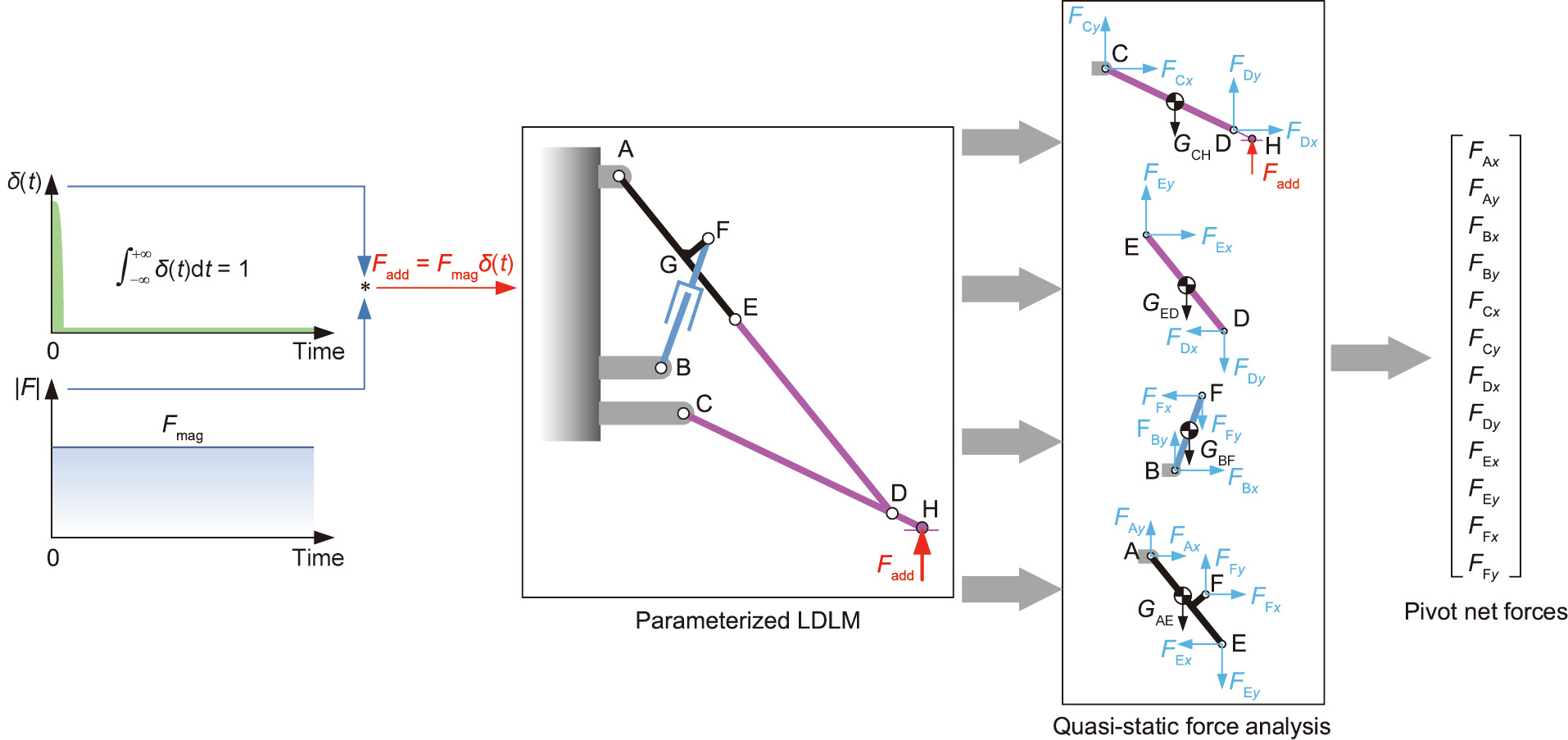
Fig. 6
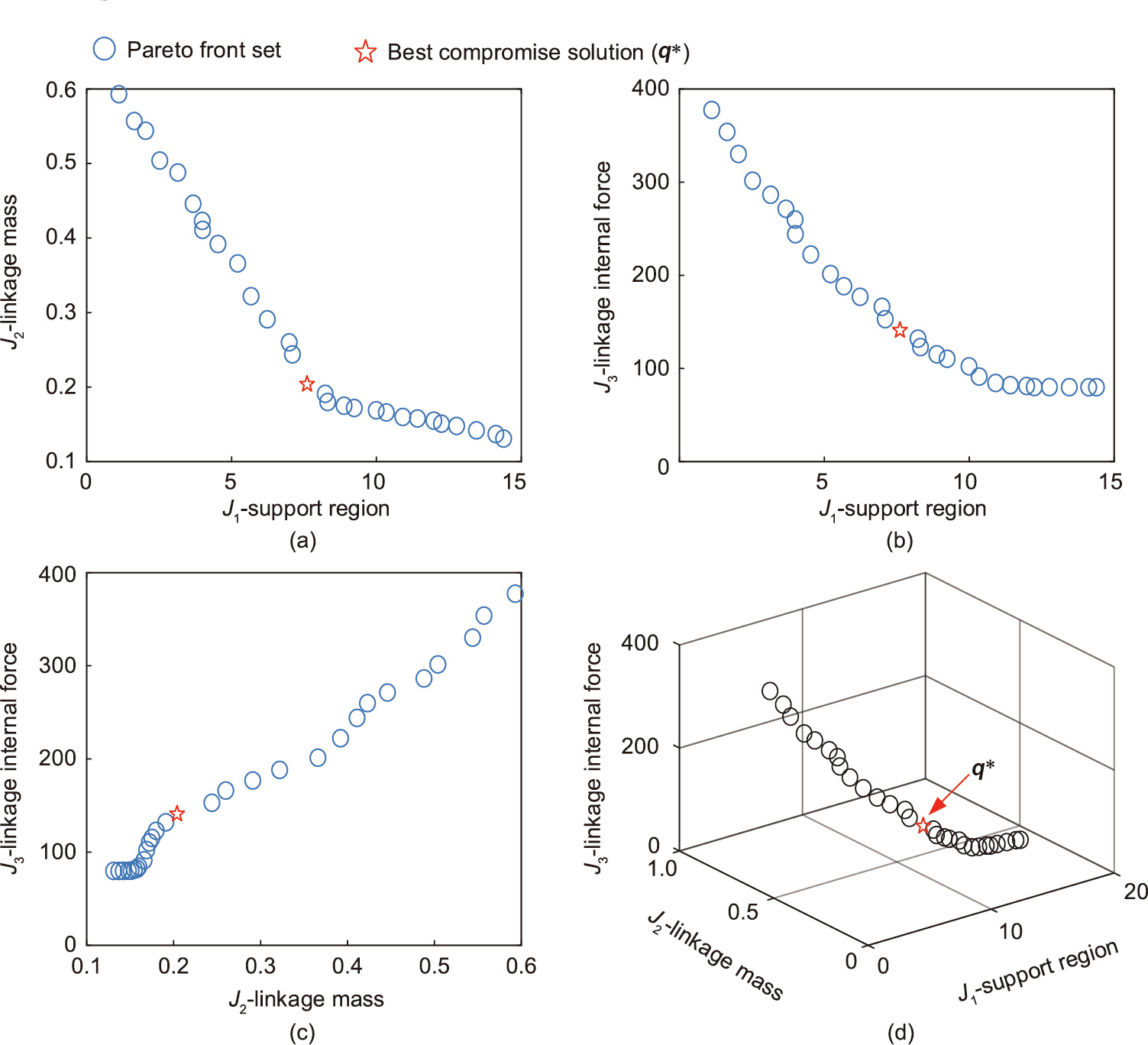
Fig. 7
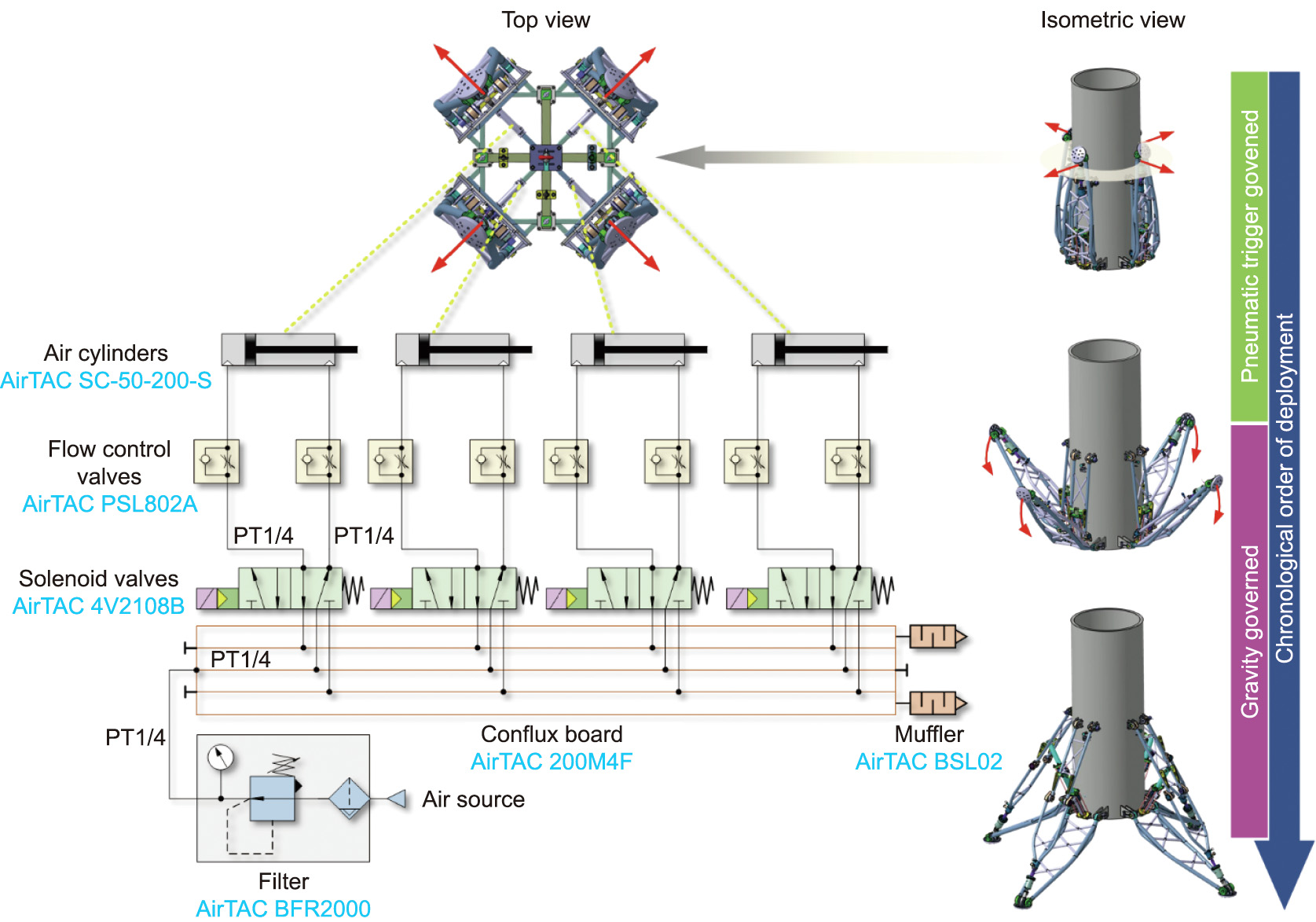
Fig. 8
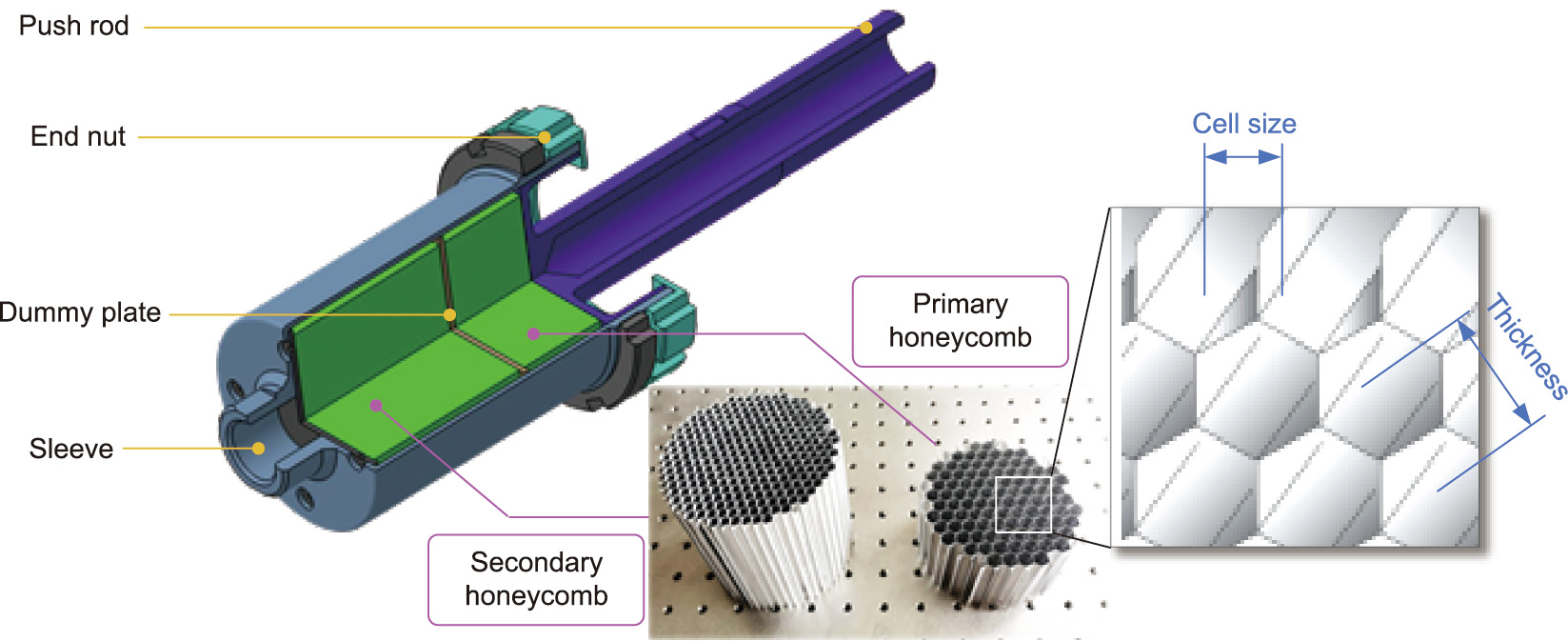
Fig. 9
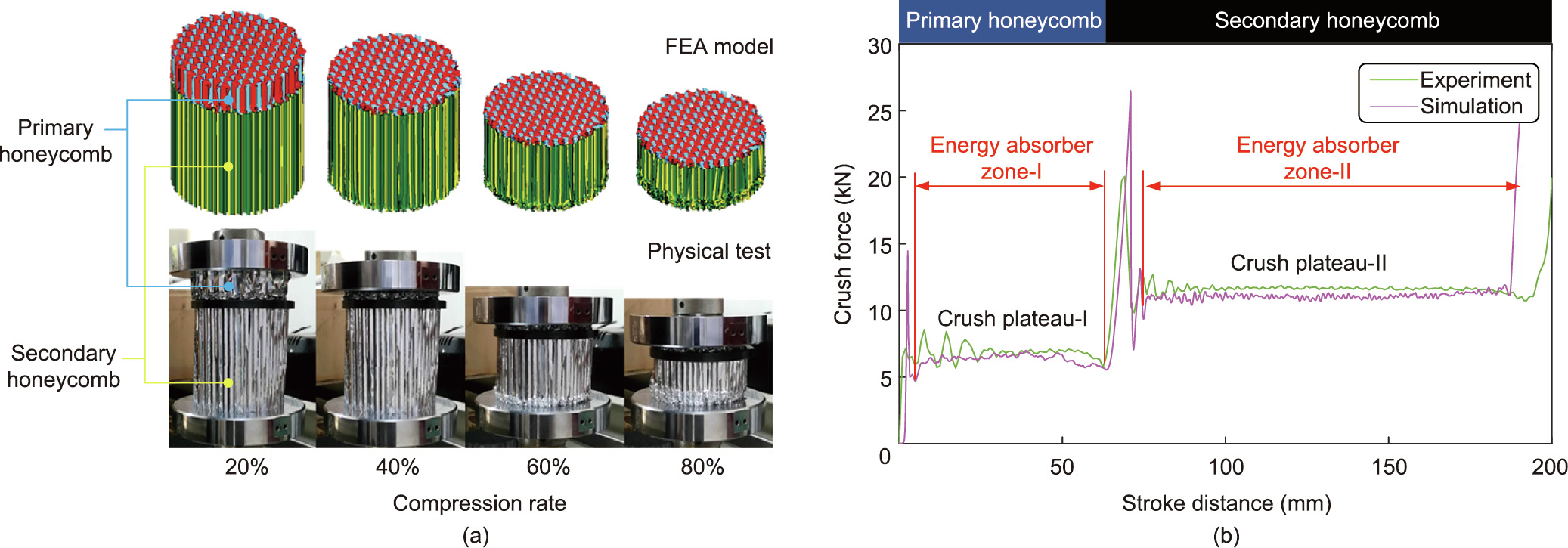
Fig. 10
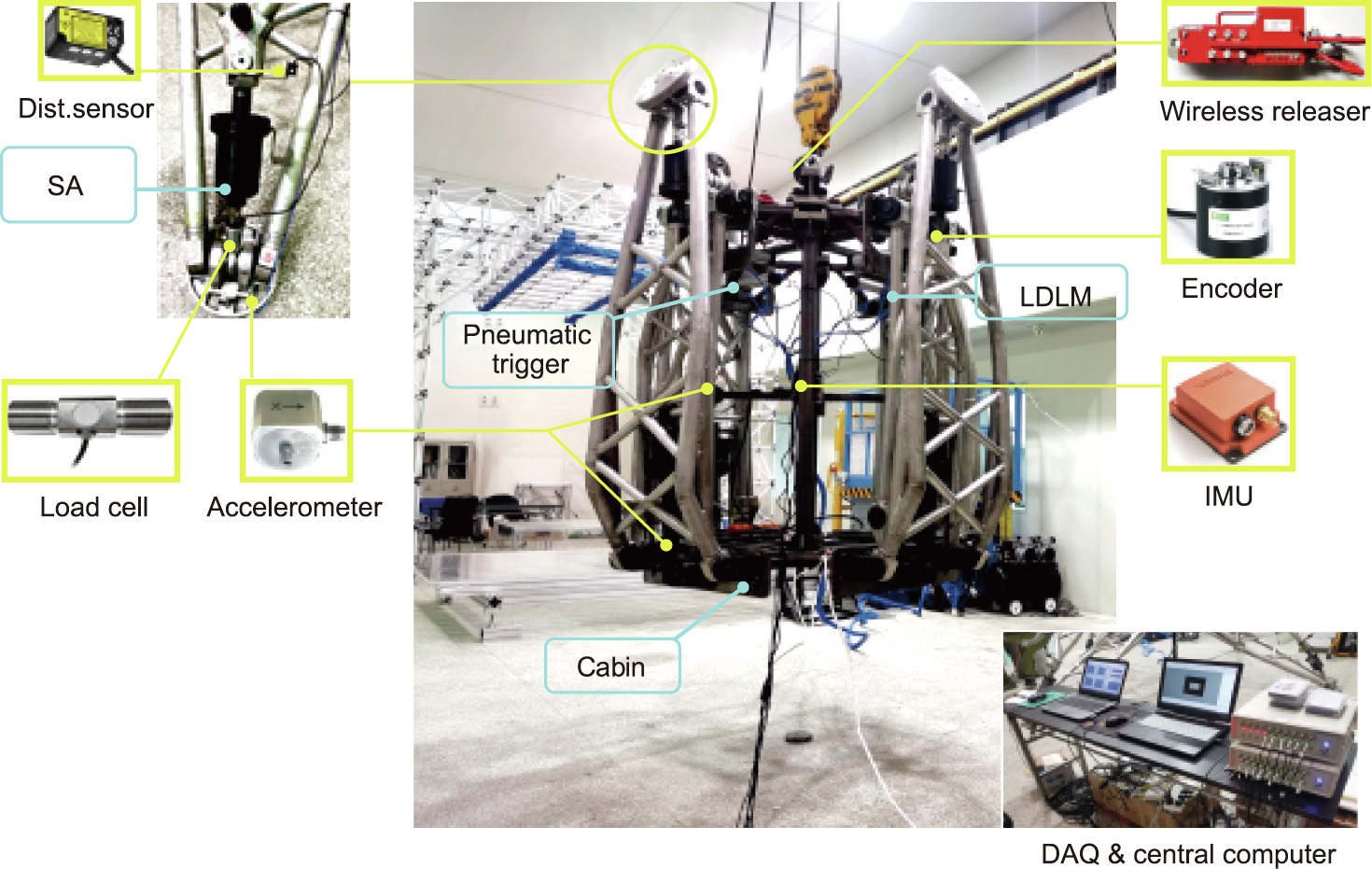
Fig. 11
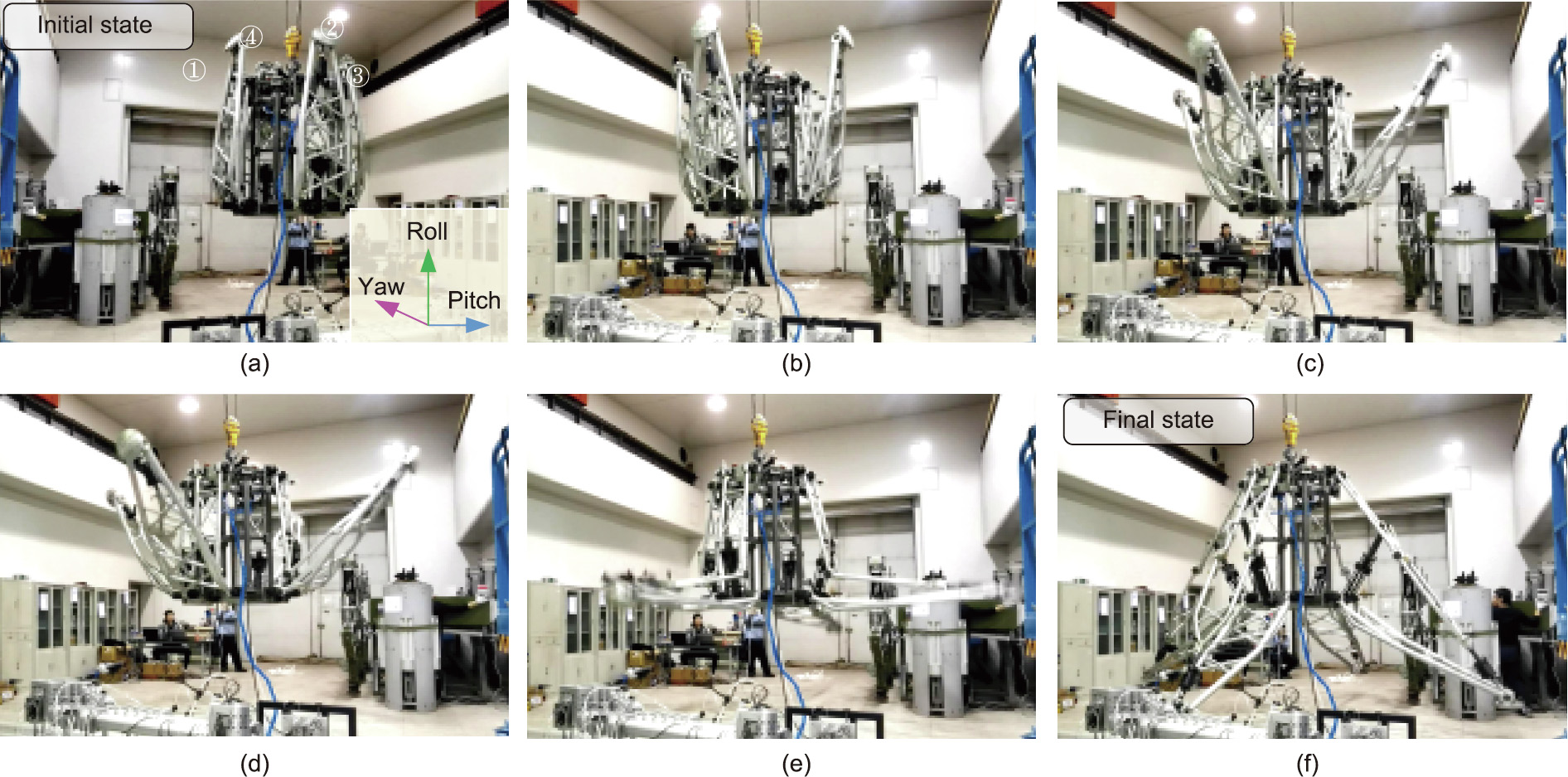
Fig. 12

Fig. 13
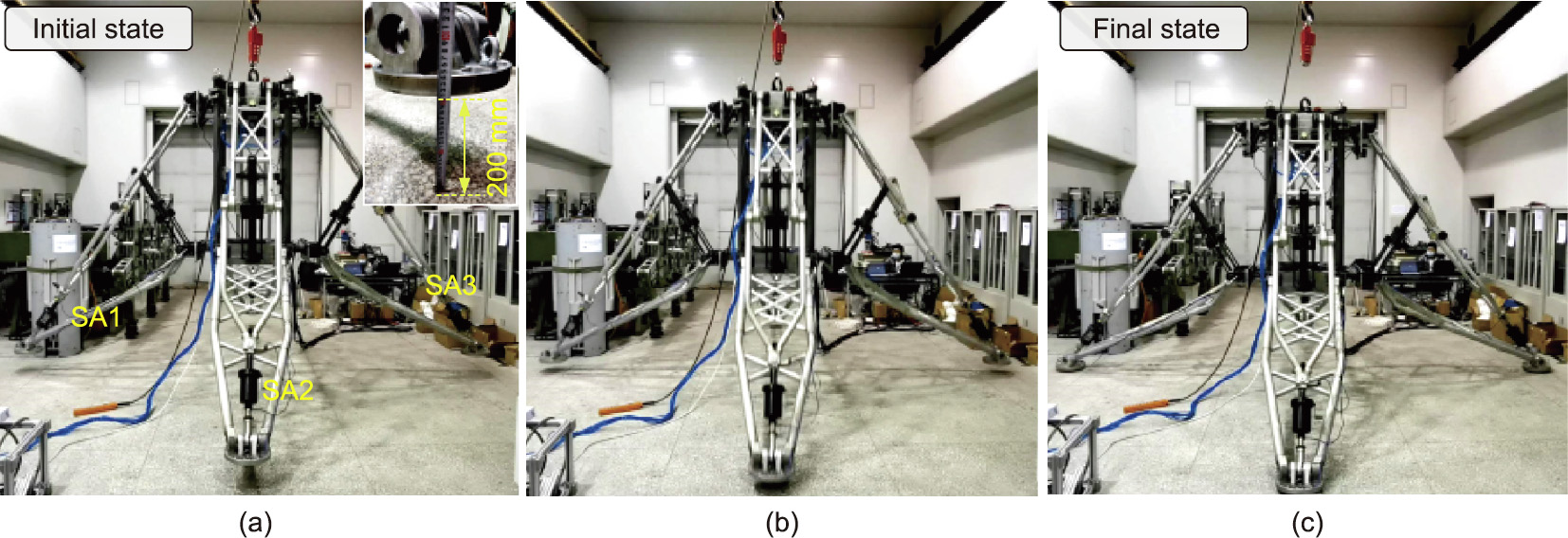
Fig. 14
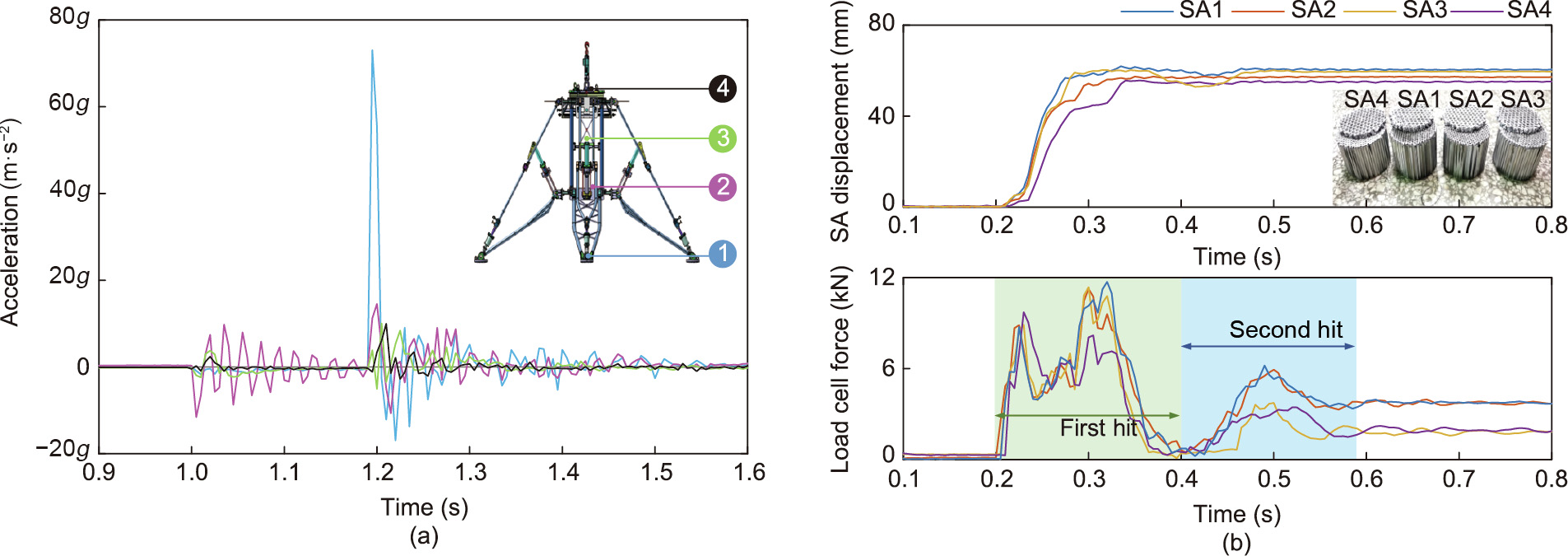
Fig. 15
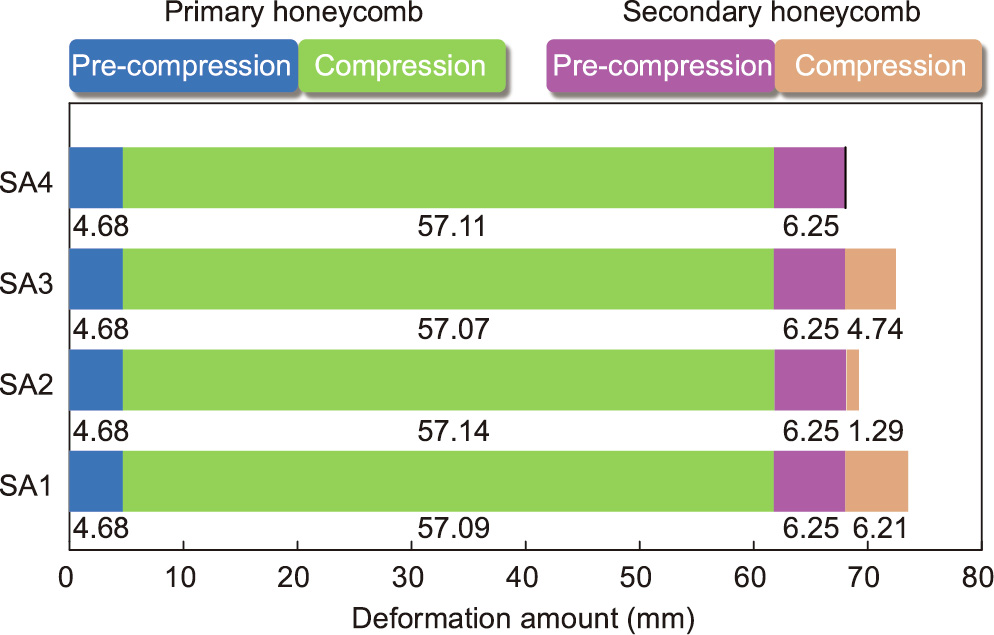
Fig. 16
References
[ 1 ] Freeman DC, Talay TA, Austin RE. Reusable launch vehicle technology program. Acta Astronaut 1997;41(11):777–90. link1
[ 2 ] Jones HW. The recent large reduction in space launch cost. In: Proceedings of the 48th International Conference on Environmental Systems (ICES); 2018 Jul 8–12; Albuquerque, NM, USA. ICES; 2018. p. 81.
[ 3 ] Jones HW. Much lower launch costs make resupply cheaper than recycling for space life support. In: Proceedings of the 47th International Conference on Environmental Systems (ICES). 2017 Jul 16–20; Charleston, SC, USA. ICES; 2017. p. 87.
[ 4 ] Wilson EK. Space tourism moves closer to lift off. Engineering 2019;5(5): 819–21. link1
[ 5 ] Davis LA. First stage recovery. Engineering 2016;2(2):152–3. link1
[ 6 ] Palmer C. Astronauts hitch first ride aboard private rocket to space station. Engineering 2020;6(11):1207–9. link1
[ 7 ] Davis LA. Falcon heavy. Engineering 2018;4(3):300. link1
[ 8 ] Leslie M. The world’s most powerful rocket. Engineering 2019;5(5):822–3. link1
[ 9 ] Weiss SP. Apollo experience report: lunar module structural subsystem. Report. Washington, DC: National Aeronautics and Space Administration; 1973 Mar. Report No.: NASA TN D-7084.
[10] Klevatt PL. Design engineering and rapid prototyping for the DC-X single stage rocket technology vehicle. In: Proceedings of the 36th AIAA/ASME/ASCE/AHS/ ASC Structures, Structural Dynamics and Materials Conference; 1995 Apr 10– 13; New Orleans, LA, USA. AIAA; 1995. p. 95.
[11] Dumbacher D, Klevatt PL. DC-XA—first step to a reusable launch vehicle. In: Proceedings of AIAA Space Programs and Technologies Conference and Exhibit; 1994 Sep 27–29; Huntsville, AL, USA. AIAA; 1994. p. 94.
[12] Falcon user’s guide [Manual]. Hawthorne: Space Exploration Technologies Corp. (SpaceX); 2020.
[13] Zhang M, Xu D, Yue S, Tao H. Design and dynamic analysis of landing gear system in vertical takeoff and vertical landing reusable launch vehicle. Proc Inst Mech Eng Part G 2019;233(10):3700–13. link1
[14] Yue S, Nie H, Zhang M, Huang M, Zhu H, Xu D. Dynamic analysis for vertical soft landing of reusable launch vehicle with landing strut flexibility. Proc Inst Mech Eng Part G 2019;233(4):1377–96. link1
[15] Maeda T, Otsuki M, Hashimoto T, Hara S. Attitude stabilization for lunar and planetary lander with variable damper. J Guid Control Dynam 2016;39(8): 1790–804. link1
[16] Maeda T, Otsuki M, Hashimoto T. Protection against overturning of a lunarplanetary lander using a controlled landing gear. Proc Inst Mech Eng Part G 2019;233(2):438–56. link1
[17] Agarwal S, Bandyopadhyay S. Design of six-bar function generators using dualorder structural error and analytical mobility criteria. Mech Mach Theory 2017;116:326–51. link1
[18] Plecnik MM, McCarthy JM. Computational design of Stephenson II six-bar function generators for 11 accuracy points. J Mech Rob 2016;8(1):11017. link1
[19] Ma S, Tomiyama T, Wada H. Omnidirectional static walking of a quadruped robot. IEEE Trans Rob 2005;21(2):152–61. link1
[20] Golubev FY, Melkumova EV. Static-stability conditions for a walking apparatus in horizontal cylinder and on two planes. J Comput Syst Sci Int 1999;38(2):278–84. link1
[21] Bretl T, Lall S. Testing static equilibrium for legged robots. IEEE Trans Rob 2008;24(4):794–807. link1
[22] Golabi S, Fesharaki JJ, Yazdipoor M. Gear train optimization based on minimum volume/weight design. Mech Mach Theory 2014;73:197–217. link1
[23] ISO/TS 15066: Robots and robotic devices—collaborative robots. International standard. Berlin: Beuth-Verlag; 2016.
[24] Deb K, Pratap A, Agarwal S, Meyarivan T. A fast and elitist multiobjective genetic algorithm: NSGA-II. IEEE Trans Evol Comput 2002;6(2):182–97. link1
[25] Zhang Q, Li H. MOEA/D: a multiobjective evolutionary algorithm based on decomposition. IEEE Trans Evol Comput 2007;11(6):712–31. link1
[26] Behzadian M, Otaghsara SK, Yazdani M, Ignatius J. A state-of the-art survey of TOPSIS applications. Expert Syst Appl 2012;39(17):13051–69. link1
[27] Lin J. Divergence measures based on the Shannon entropy. IEEE Trans Inform Theory 1991;37(1):145–51. link1











 京公网安备 11010502051620号
京公网安备 11010502051620号




