
2015, Volume 1, Issue 1
Engineering >> 2015, Volume 1, Issue 1 doi: 10.15302/J-ENG-2015011
A Novel Tele-Operated Flexible Robot Targeted for Minimally Invasive Robotic Surgery
1 Department of Biomedical Engineering, National University of Singapore, Singapore 119077, Singapore
2 Faculty of Design, Production Engineering, and Automotive Engineering, University of Stuttgart, 70569 Stuttgart, Germany
3 Institute of Digestive Disease, the Chinese University of Hong Kong, Hong Kong, China
4 Chow Yuk Ho Technology Centre for Innovative Medicine, the Chinese University of Hong Kong, Hong Kong, China
Next Previous
Abstract
In this paper, a novel flexible robot system with a constrained tendon-driven serpentine manipulator (CTSM) is presented. The CTSM gives the robot a larger workspace, more dexterous manipulation, and controllable stiffness compared with the da Vinci surgical robot and traditional flexible robots. The robot is tele-operated using the Novint Falcon haptic device. Two control modes are implemented, direct mapping and incremental mode. In each mode, the robot can be manipulated using either the highest stiffness scheme or the minimal movement scheme. The advantages of the CTSM are shown by simulation and experimental results.
Figures
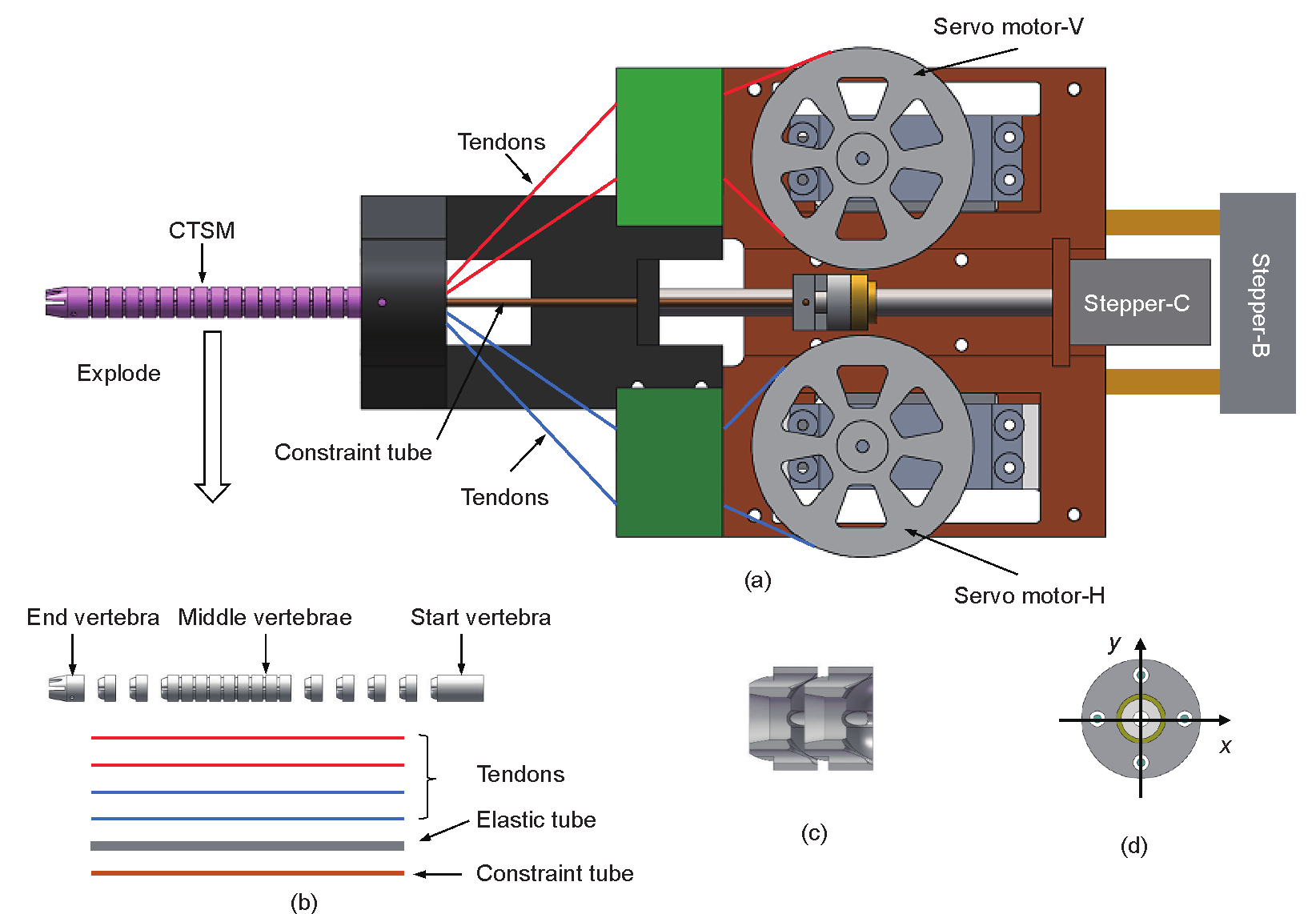
Fig. 1
Fig. 2
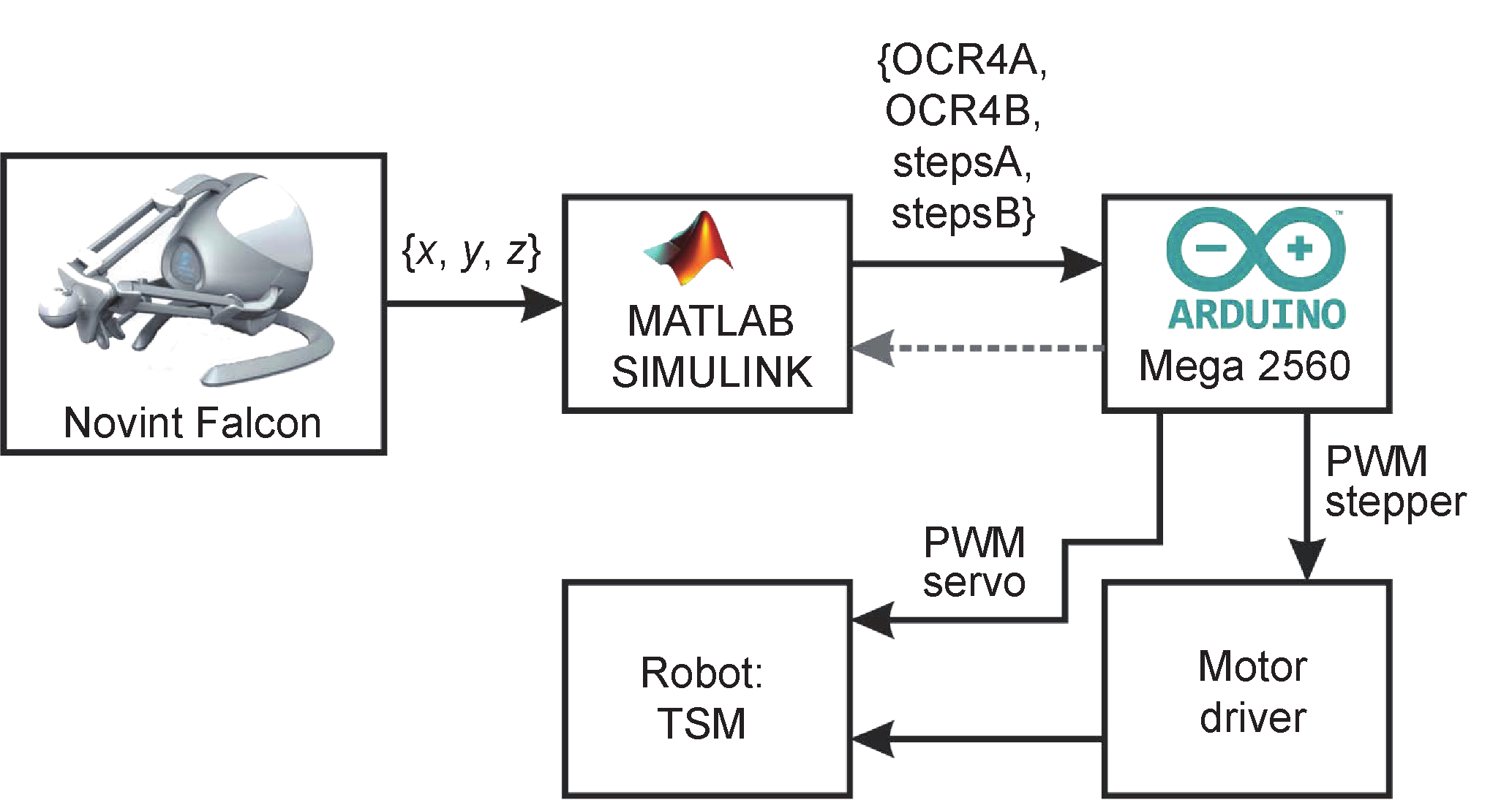
Fig. 3
Fig. 4

Fig. 5

Fig. 6
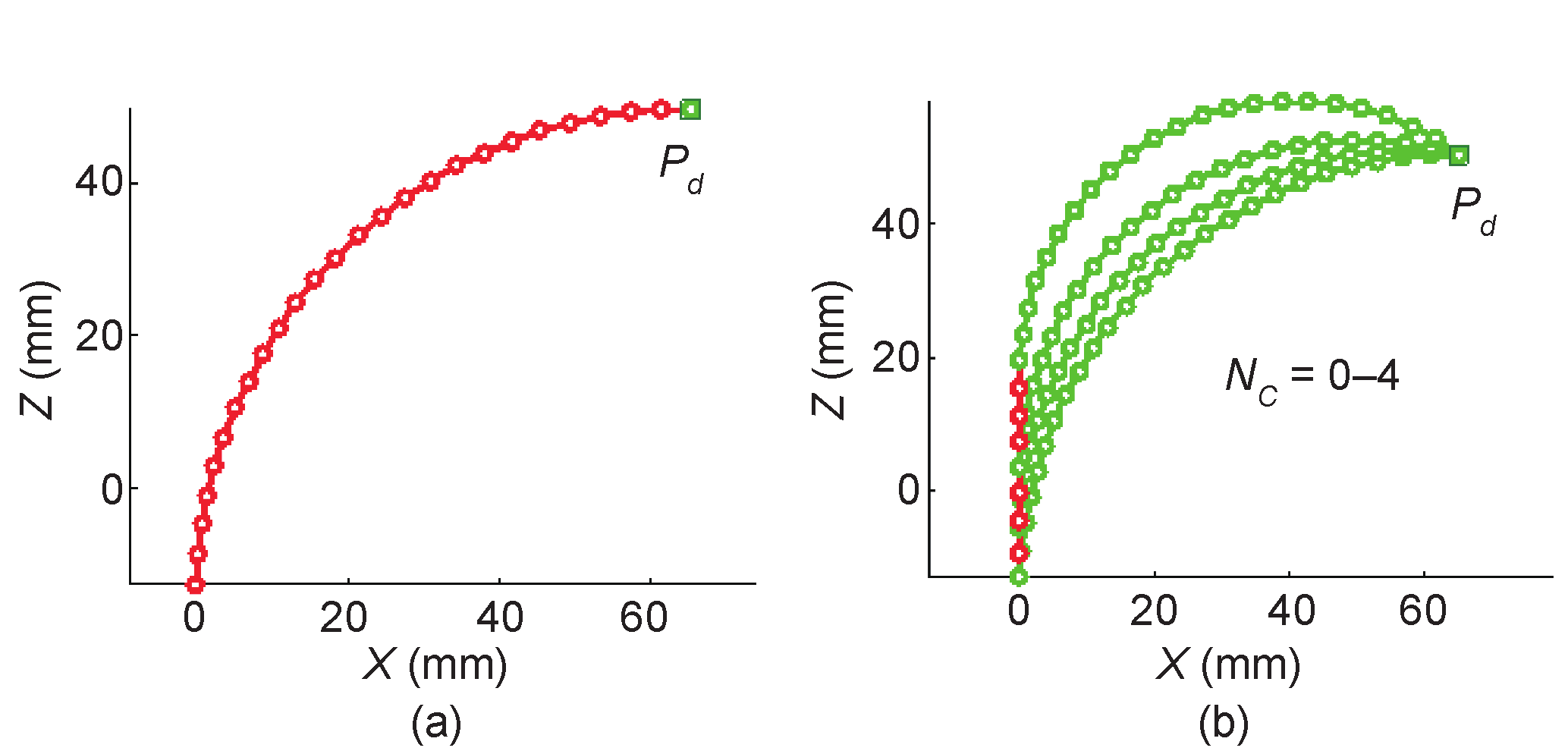
Fig. 7
Fig. 8
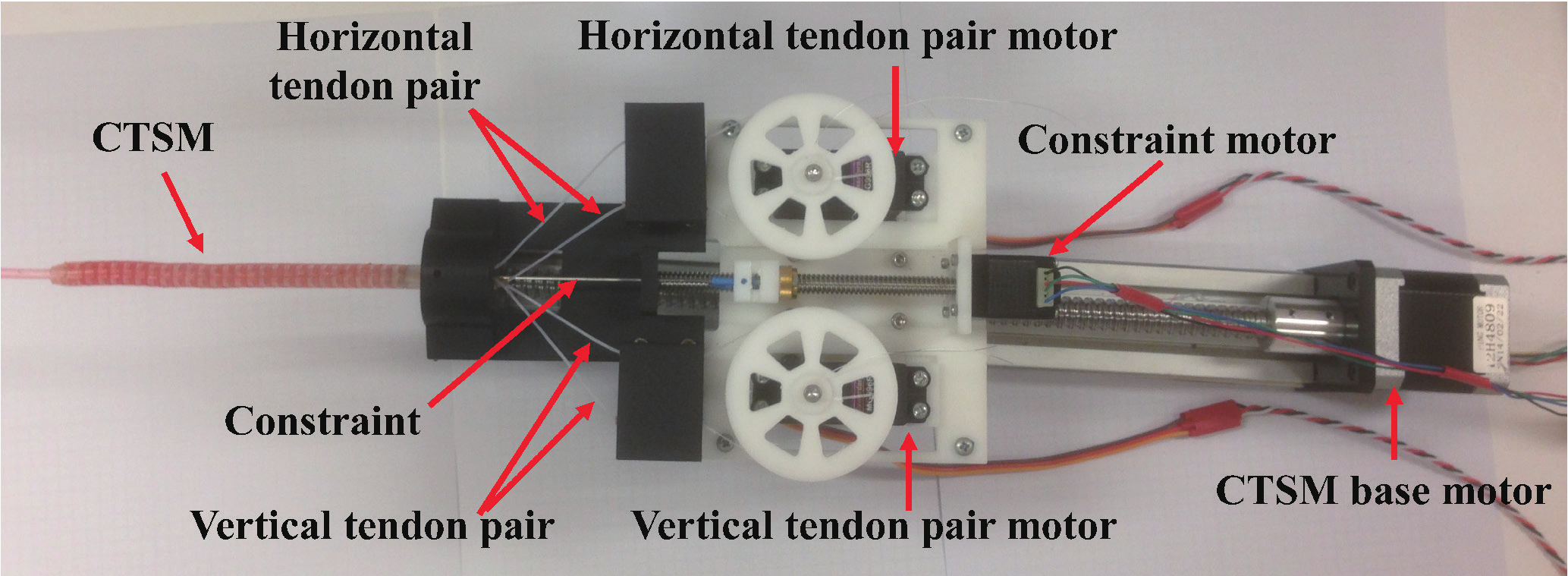
Fig. 9
Fig. 10

Fig. 11
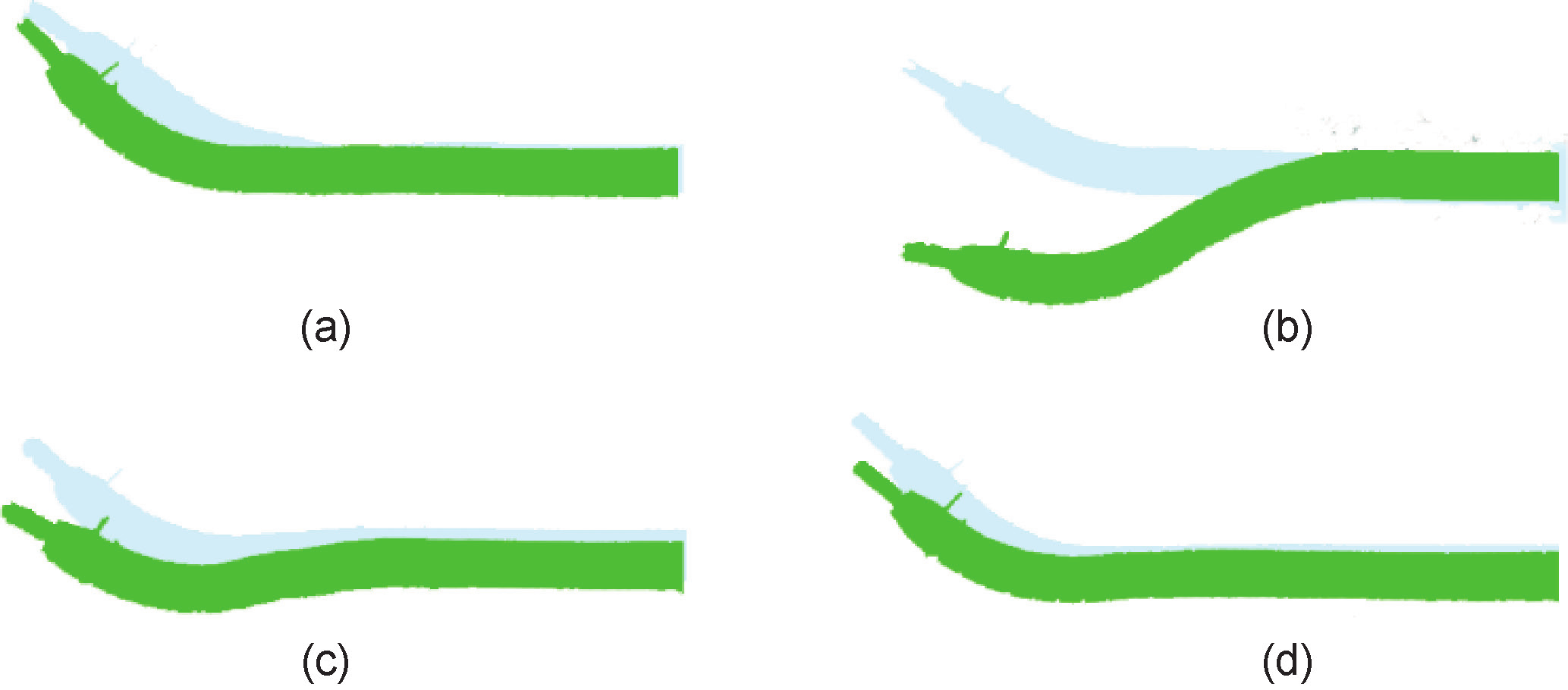
Fig. 12
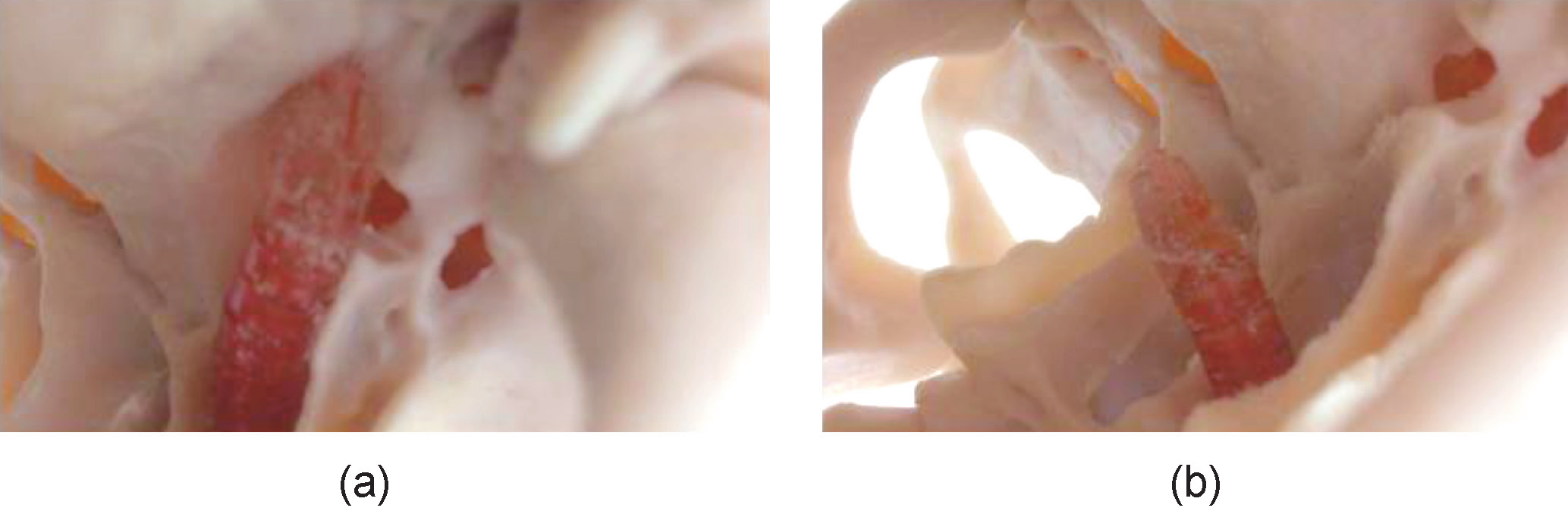
Fig. 13
References
[ 1 ] H. Ren, Computer-assisted transoral surgery with flexible robotics and navigation technologies: A review of recent progress and research challenges. Crit. Rev. Biomed. Eng., 2013, 41(4¯5): 365–391 link1
[ 2 ]
Medgadget LLC. Intuitive’s new da Vinci Sp single port minimally invasive robotic system (VIDEO). 2014-
[ 3 ] Z. Li, R. Du. Design and analysis of a bio-inspired wire-driven multi-section flexible robot. Int. J. Adv. Robot. Syst., 2013, 10: 1–9
[ 4 ] Z. Li, R. Du, M. C. Lei, S. M. Yuan. Design and analysis of a biomimetic wire-driven robot arm. In: Proceedings of the ASME 2011 International Mechanical Engineering Congress and Exposition, 2011: 191–198
[ 5 ] K. Xu, J. Zhao, M. Fu. Development of the SJTU unfoldable robotic system (SURS) for single port laparoscopy. IEEE/ASME Trans. Mechatron., 2014(99): 1–13
[ 6 ] N. Simaan, R. Taylor, P. Flint. A dexterous system for laryngeal surgery. In: Proceedings of IEEE International Conference on Robotics and Automation, vol. 1. IEEE, 2004: 351–357
[ 7 ] J. Burgner, A telerobotic system for transnasal surgery. IEEE/ASME Trans. Mechatron., 2013, 19(3): 996–1006
[ 8 ] P. E. Dupont, J. Lock, B. Itkowitz, E. Butler. Design and control of concentric-tube robots. IEEE Trans. Robot., 2010, 26(2): 209–225 link1
[ 9 ] G. Lum, S. Mustafa, H. Lim, W. Lim, G. Yang, S. Yeo. Design and motion control of a cable-driven dexterous robotic arm. In: Proceedings of IEEE Conference on Sustainable Utilization and Development in Engineering and Technology (STUDENT). IEEE, 2010: 106–111
[10] A. Degani, H. Choset, A. Wolf, M. A. Zenati. Highly articulated robotic probe for minimally invasive surgery. In: Proceedings of IEEE International Conference on Robotics and Automation. IEEE, 2006: 4167–4172
[11] Z. Li, R. Du. Expanding workspace of underactuated flexible manipulator by actively deploying constrains. In: Proceedings of IEEE International Conference on Robotics and Automation. IEEE, 2014: 2901–2906
[12] Z. Li, H. Yu, H. Ren. A novel underactuated wire-driven flexible robotic arm with controllable bending section length (abstract). In: ICRA 2014 Workshop on Advances in Flexible Robots for Surgical Interventions, 2014: 11
[13] Z. Li, R. Du, H. Yu, H. Ren. Statics modeling of an underactuated wire-driven flexible robotic arm. In: Proceedings of IEEE RAS & EMBS International Conference on Biomedical Robotics and Biomechatronics. IEEE, 2014: 326–331
[14]
Novint Falcon haptic device. [2014-
[15] J. Feiling, Z. Li, H. Ren, H. Yu. The constrained tendon-driven serpentine manipulator and its optimal control using novint falcon. In: The 28th Canadian Conference on Electrical and Computer Engineering, 2015 (in press)
[16] K. Klein, J. Neira. Nelder-Mead simplex optimization routine for large-scale problems: A distributed memory implementation. Comput. Econ., 2014, 43(4): 447–461 link1











 京公网安备 11010502051620号
京公网安备 11010502051620号




