2019, Volume 21, Issue 6
Strategic Study of CAE >> 2019, Volume 21, Issue 6 doi: 10.15302/J-SSCAE-2019.06.014
Underwater Attack–Defense Confrontation System and Its Future Development
China Ship Development and Design Center, Wuhan 430064, China
Next Previous
Abstract
As an important development direction of naval warfare, the underwater attack–defense confrontation system integrates underwater warning, scout, detection, attack, defense and a series of other operations. Currently, although underwater offensive and defensive weapons have developed rapidly, research on the capacity building, combat styles, and development priorities of the confrontation system still lacks. This paper first summarizes the status quo of underwater confrontation system construction in some military powers, and analyzes the functional composition and typical combat styles of the future underwater attack–defense confrontation system. Furthermore, it systematically studies the development directions of the future confrontation system, and proposes corresponding suggestions for the development of the underwater attack–defense system and equipment, including improving integrated perception and navigation, developing unified command and control, and promoting military-civilian integration.
Keywords
underwater attack and defense ; confrontation system ; coordinated combat ; unmanned system
Figures

Fig. 1
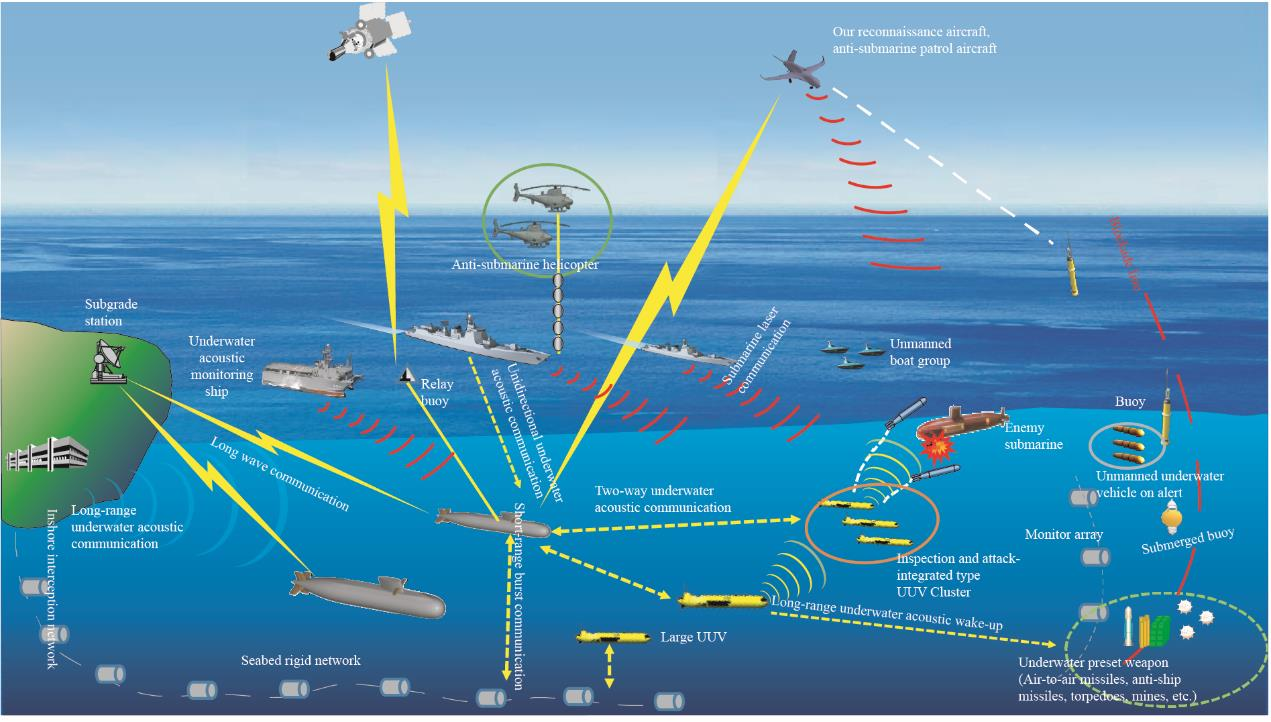
Fig. 2

Fig. 3

Fig. 4
References
[ 1 ] Si G Y, Miao Y, Li G F. Underwater tridimensional attack-defense system technology [J]. Command Control & Simulation, 2018,40(1): 1–8. Chinese. link1
[ 2 ] Ma L, Zhang M Z. Research progress on war complex system of systems modeling [J]. Journal of System Simulation, 2015, 27(2):217–225, 245. Chinese. link1
[ 3 ] Vaccaroand R J, Harrison B F. Optimal matrix-filter design [J]. IEEE Transactions on Signal Processing, 1996, 44(3): 705– 709. link1
[ 4 ] Cox H. Multi-rate adaptive beamforming (MRABF) [C]. Cambridge: Proceedings of the 2000 IEEE Sensor Array and Multichannel Signal Processing Workshop, 2000. link1
[ 5 ] Sun C. Signal processing for underwater multi-sensor array [M]. Xi’an: Northwestern Polytechnical University Press, 2007. Chinese.
[ 6 ] Capon J. High-resolution frequency-wave number spectrum analysis [J]. Proceedings of the IEEE, 1969, 57(8): 1408–1418. link1
[ 7 ] Yang Z D, Li R, Cai W J, et al. Development and key technologies of preset undersea weapon: A review [J]. Journal of Unmanned Undersea Systems, 2018, 26(6): 521–526. Chinese. link1
[ 8 ] Cao H W, Xue C G, Huang J G, et al. Design and realization of integrated simulation environment for underwater counterwork [J]. Journal of System Simulation, 2006, 18(z2): 285–288. Chinese. link1
[ 9 ] Cao H W, Huang J G, Hu F. Modeling of underwater counterwork system based on object Petri net [J]. Journal of System Simulation,2007, 19(12): 2642–2646, 2653. Chinese. link1
[10] Qi Z Y, Chu F Z. Design and implementation of effectiveness evaluation system for underwater acoustic warfare [J]. Ship Electronic Engineering, 2017, 37(10): 100–103. Chinese. link1
[11] Ma G Q. Acoustic antagonizing training under the complicated underwater acoustic environment and developing of assistant effect evaluating system [C]. Chengdu: Proceedings of the 2004Acoustic Warfare Technology, 2004. Chinese. link1
[12] Li M H. The research of ship’s underwater combat deduction and assessment based on the Monte Carlo method [D]. Wuhan: China Ship Development and Design Center (Master’s thesis), 2014. Chinese. link1
[13] Xiong P J, Liu Z, Zhang H, et al. The development of undersea attack-defense warfare system [J]. Ship Science and Technology,2016, 38(10): 145–149. Chinese. link1
[14] Pan G, Song B W, Huang Q G, et al. Development and key techniques of unmanned undersea system [J]. Journal of Unmanned Undersea Systems, 2017, 25(1): 44–51. Chinese. link1
[15] Yin W W, Guo S L. Survey on non-satellite underwater navigation and positioning technology [J]. Ship Electronic Engineering, 2017,37(3): 8–11. Chinese. link1











 京公网安备 11010502051620号
京公网安备 11010502051620号




