《1 测量是获取信息的重要手段》
1 测量是获取信息的重要手段
当今的时代是信息时代。在工业和科技领域主要通过测量获取信息。门德列耶夫说过:“没有测量就没有科学。”要对世界有精确的认识必须有测量。牛顿曾预言万有引力使月球环绕地球转动。但由于当时测量技术的限制未得证实。测量技术的进步证明了他的预言, 万有引力学说真正成为科学。
生产发展的主要指标是产品质量和生产效率。没有测量就无从控制产品的质量。高速运转对机器精度提出很高的要求, 测量起着重要的作用。现代的自动化是柔性自动化, 越是柔性的系统越需要测量。测量信息是控制和智能化的依据。物质流和能量流在信息流指挥和控制下运动。
高科技离不开测量。火箭姿态角的微小偏差会使它的飞行轨迹发生巨大偏离, 需通过测量对它的轨迹不断校正。纳米技术以纳米测量技术为支撑。
作为信息时代的标志, 是高速度大容量计算机的发展, 其关键是大规模集成电路制作技术。高精度的重复定位和曝光的支柱是精密测量
《2 测量与信息技术的融合是测量技术发展的方向》
2 测量与信息技术的融合是测量技术发展的方向
测量技术发展的一个重要特点是它与信息技术的融合。这种融合的必然性可归纳为如下5个方面。
1) 提高测量精度的需要测量总是伴随着噪声, 需要通过优化测量布局与信号处理来分离。
2) 自动、在线和动态测量的需要在线测量条件差, 各种因素影响大, 要在运动情况下捕捉快速变化的信息, 需要测量与信息技术的融合。
3) 复杂参数测量的需要如曲面测量, 从编程到数据处理都要求测量与信息技术的融合。刀具磨损需通过切削力或功率消耗增大和声发射频率变化等徵兆来综合判断。在故障诊断中也有大量类似情况。
4) 复杂环境下测量的需要如野外、高温下、高速运转下测量, 宇宙空间、地下测量等。如地下管道泄漏及预报, 由于在地下, 管道又长, 需在几个泵站测量管道压力波流量热力传输等的变化, 通过信息融合判定泄漏。
5) 智能测量的需要要求能根据内部和外部条件实现自适应、优化。
测量与信息技术的融合贯穿在测量信息从拾取到决策、执行的全过程。
在信息的拾取中, 为提高测量信噪比, 常通过调制赋予测量信号某一特征, 提高它的抗干扰能力。为了全面准确地反映被测量的情况。需要采取正确的采样策略。然后通过重构恢复被测量的全貌。当对象的状态不能靠单一的传感器测量确定时, 就需要将若干信号以一定方式融合。在复杂参数测量和过程的监控中, 数据量往往很大, 可将平坦区数据压缩, 需要时再恢复。为了滤除采样和载波频率信号、噪声, 分离不同频率信号等, 还需要滤波。
为了对信号进行各种处理, 提取其特征, 作出决策, 常对信号进行各种变换, 进行时间序列分析和各种谱分析;对数据进行拟合, 通过理论分析与实验方法建模;利用模式识别的方法按测量结果确定被测对象的类属;神经网络通过“训练”使网络具有与系统接近的特性:它们在实验建模、过程控制、预报和故障诊断中得到广泛应用。
测量与信息技术的融合在测量的优化和智能测量中有重要作用。根据误差的某一特征, 或改变其组合关系, 可以将误差分离。利用平均、差分、反馈、标定、预报、冗余及各种信号处理技术实现误差补偿, 降低成本, 达到单纯依靠制造精度难以实现的高精度。虚拟测量通过仿真模拟测量过程, 发现问题、估算精度、实现优化。根据对系统外部和内部状态的测量结果, 利用知识库、专家系统等作出决策, 实现系统的智能化。
下面结合作者的一些研究工作对误差补偿与冗余技术作些介绍。
《3 三坐标测量机误差补偿》
3 三坐标测量机误差补偿
三坐标测量机将空间元素的测量一律转化为坐标测量, 再利用软件实现元素的重构, 具有很大通用性。由于制造误差, 存在3个平移和3个转动误差, 还有3轴间的正交误差及温度和力变形引起的误差。误差补偿利用精度更高的仪器或基准测出测量机各点误差, 存于软件内, 在运行中修正。几乎无需要成本, 就可大幅度提高测量精度。三坐标测量机误差补偿的关键技术包括模型建立, 误差测定和补偿软件[1,2]。
若直接测量在不同温度与力变形下的空间各点误差, 工作量非常大。常通过建立模型, 确定测量机误差与各原始误差之间的关系, 在测得各原始误差后进行误差补偿。针对不同类型测量机, 作者提出了准刚体模型与非刚体模型。
图1所示移动桥式三坐标测量机中薄弱环节是横梁8, 滑座5沿其运动时产生的力变形与横梁不变形但有同样大小的直线度误差影响相同。这时仍可按刚体处理, 称之为准刚体模型。在误差测量中测得的也是二者的综合影响。
在工作台1、移动桥3、滑座5与主轴7上分别建立直角坐标系OXYZ、O1X1Y1Z1、O2X2Y2Z2、O3X3Y3Z3。测端P在工作坐标系OXYZ的位置
\( \boldsymbol{O P}=\boldsymbol{X}+\boldsymbol{R}^{-1}(x)\left\{\boldsymbol{Y}+\boldsymbol{R}^{-1}(y)\left[\boldsymbol{Z}+\boldsymbol{R}^{-1}(z) \boldsymbol{P}\right]\right\} , \) (1)
其中P是测端在主轴坐标系中的位置矢量, 它由测头9的结构确定。R (x) 、R (y) 、R (z) 分别为移动桥3、滑座5与主轴7沿X、Y、Z向运动时由于角运动误差产生的旋转矩阵
\(\boldsymbol{R}(x)=\left|\begin{array}{ccc} 1 & \varepsilon_{z}(x) & -\varepsilon_{y}(x) \\ -\varepsilon_{z}(x) & 1 & \varepsilon_{x}(x) \\ \varepsilon_{y}(x) & -\varepsilon_{x}(x) & 1 \end{array}\right|\) (2)
其中εx (x) 、εy (x) 、εz (x) 分别为移动桥3沿X向运动时绕X、Y、Z轴转动的角运动误差。将 (2) 中自变量x改为y或z, 就可以得到R (y) 或R (z) , R-1为R的逆矩阵。X、Y、Z分别为移动桥、滑座与主轴的实际位移。
\(\begin{array}{c} \boldsymbol{X}=\left[\begin{array}{c} x+\oint(x) \\ \oint(x) \\ \oint(x) \end{array}\right], \boldsymbol{Y}=\left[\begin{array}{c} \oint(y)-y \alpha_{x y} \\ y+\oint(y) \\ \oint(y) \end{array}\right], \\ \boldsymbol{Z}=\left[\begin{array}{c} \oint(z)-z \alpha_{x z} \\ \oint(z)-z \alpha_{y z} \\ z+\oint(z) \end{array}\right] \end{array}\) (3)
其中δu (v) 为运动部件v向运动时在u向的误差, αuv为u、v运动间的垂直度误差;u、v可为x、y或z。
在图2所示水平臂三坐标测量机中力变形引起的测端P的位移同时是水平臂2的Y向位置和滑套1的z向位置的函数。可在准刚体模型基础上, 引入由于力变形而引起的附加位移δy (y, z) 和δz (y, z) 。这种模型属于非刚体模型。
进行温度误差补偿需建立温度误差模型。在只有伸缩变形时, 温度误差
\(\Delta l=l\left(\alpha_{\mathrm{p}} \Delta t_{\mathrm{P}}-\alpha_{\mathrm{s}} \Delta t_{\mathrm{s}}\right)\) (4)
式中l为被测尺寸 (mm) ;αP、αs分别为被测件与标尺的线膨胀系数 (1/℃) ;ΔtP、Δts分别为被测件与标尺相对于20℃的温度偏差 (℃) 。
图1中三根标尺 (2、4、6) 不仅Δts不同, 由于结构不同, 三根轴的线膨胀系数αs也可能不同, 需按实测得到的线膨胀系数计算。在具有复杂热变形的情况下, 可将由热变形引起的角运动误差与垂直度误差如同几何运动误差一样, 按数学模型计算它们对坐标测量精度的影响。
利用数学模型还可在测得一组综合误差后求得原始误差。作者提出了通过测量某22条线的线位移误差确定21项几何误差的方法[3]。只测线位移误差大大简化了测量设备, 用激光干涉仪测量位移可达很高精度。如用激光干涉仪测量坐标面上两条对角线的长度差, 确定两轴间的垂直度误差可达0.1″的精度。作者还提出了通过测量在单位温度变化下δu (u) 曲线平均斜率的变化, 来实测标尺线膨胀系数αs。以上方法已为国际上广泛采用, 并纳入一些国家标准。
为正确进行误差补偿, 需在用户现场测量机器误差。为此作者研制了图3所示一维球列[4]。它像步距规, 但为三维量具, 可同时用于检测测量机的定位误差与两个方向上的直线度运动误差。一维球列制作简单, 球心位置的直线度误差的影响可以用180°转位法来消除。美国国家标准与技术研究院已在推广一维球列。
有了数学模型并测得所需误差后, 编写误差补偿软件就不是一件难事。但为了改造已有的三坐标测量机, 鉴于测量机的数据处理软件多已固化, 作者开发了一种在上位机中按所需修正的误差值进行坐标系平移以实现误差补偿的方法[5]。
采用误差补偿技术可使三坐标测量机测量误差减小80%左右, 效果显著。
《4 冗余技术在圆度和轴系测量中的应用》
4 冗余技术在圆度和轴系测量中的应用
测量工件的圆度常以圆度仪轴系为基准。检测圆度仪的精度用标准球作基准。标准球又怎么检测呢?为解决这一问题发展了180°转位法、多步法等误差分离技术。它们要求圆度仪有很好的重复性, 并且不能用于在线测量。
圆度和轴系测量中共有3个误差, 轴系有X和方向两个运动误差工件有圆度误差利用个测头得3组方程, 可同时求得3个误差。问题是这3个测头无论如何布局都会使某些谐波受到抑制。为解决这一问题, 作者提出了四点法[6,7] (图4) , 4个测头1、2、3、4同时测量工件5的圆度, 得到方程组 (4个方程)
式中θ为轴系转角, r (θ) 为工件的圆度误差, x (θ) 、y (θ) 分别为轴系的X和Y向的运动误差, i=1~4, φ1=0, Ri为在初始位置 (θ=0) 的测头示值。在这一位置, r (θ) =x (θ) =y (θ) =0, 构作一个新函数
选取a2、a3、a4的值使
可以在式 (6) 中将x (θ) 、y (θ) 消除。在测得Si (θ) 后, 可算出r (θ) 。在三点法中, 只有a2、a3两个系数。在测量布局确定后, a2、a3也就确定, 不可避免地会使某些谐波受到抑制。在四点法中, 有三个系数a2、a3、a4可供选择, 只需满足两个方程, 一个系数可任意选择, 可对各次谐波分别优化。
《5 冗余技术在大尺寸测量中的应用》
5 冗余技术在大尺寸测量中的应用
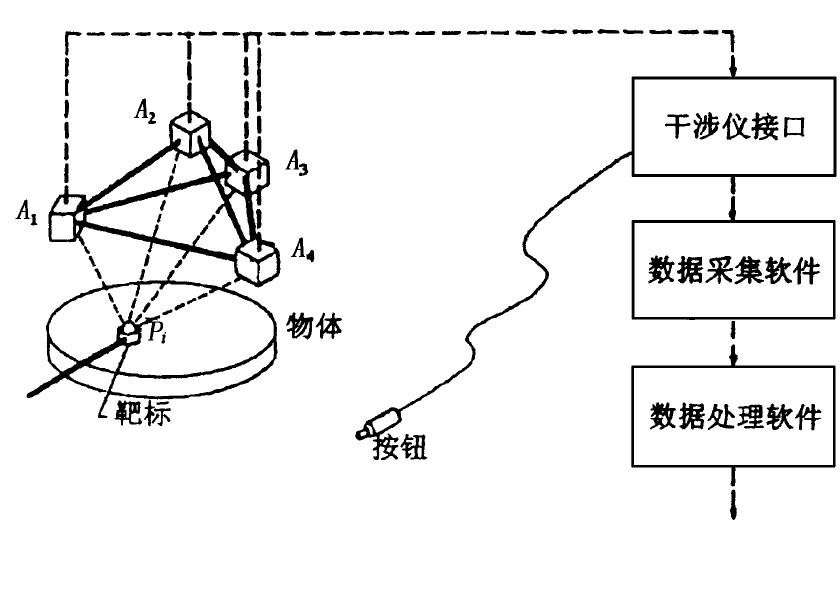
测量大型工程对象需在它的周围构作坐标测量系统传统的方法是采用经纬仪它基于角度测量, 这时需用长标尺定标。长标尺的制造、使用、标定都不方便, 且容易变形。作者研制了一套激光跟踪柔性坐标测量系统。靶标Pi沿被测物体运动时 (图5) , 4个激光跟踪干涉仪A1、A2、A3、A4跟踪它的运动, 并测量Pi点的距离。若用3个干涉仪, 必须知道它们的相对位置。较好的办法是采用冗余技术, 用4个干涉仪。每测一个点Pi可以得到一个方程组 (4个方程)
\(\begin{array}{c} \left(x_{i}-x_{A j}\right)^{2}+\left(y_{i}-y_{A j}\right)^{2}+\left(z_{i}-z_{A j}\right)^{2}= \\ \left(s_{i j}+l_{j}\right)^{2}, \end{array}\) (9)
这里xi、yi、zi为点Pi的坐标;xAj、yAj、zAj (j=1~4) 为干涉仪Aj的基点坐标;sij为干涉仪Aj测量点Pi时的读数, lj为干涉仪Aj读数为零时的初始距离。测量n个点后有4n个方程 (9) , 被测点有3n个未知坐标。坐标系可任意选择, 总未知数为3n+10, 只要4n≥3n+10, 就可实现系统的自标定。
利用冗余技术, 还可实现下列功能:
1) 误差补偿激光跟踪系统要求跟踪中基点位置不变。但实际上各跟踪干涉仪转镜上的光点很难通过它的回转中心, 且光点偏离回转中心的量bj (j=1~4) 难以精确确定, 可将bj带来的光程变化写入方程 (9) 。利用冗余技术, 只要使测点数n≥14, 即可将bj求出, 实现误差补偿。
2) 丢失信息自恢复激光干涉测量系统一旦发生挡光, 就会把前面的测量信息全部丢失。在自标定后, 只要有3台干涉仪正常工作, 仍可确定动点Pi的坐标。在被挡光的干涉仪恢复通光后, 由于动点与基点坐标均已知, 可以按算出的方位恢复跟踪, 按算出的距离将干涉仪置数。
3) 系统的重组4台干涉仪很难同时探测到被测对象的各个侧面。完成标定后, 只要有3台干涉仪就可以保持原有坐标系。可逐步将干涉仪一一转移到新的位置, 再测4个点就可确定转移后的一个新基点位置保持坐标系统一











 京公网安备 11010502051620号
京公网安备 11010502051620号




