

《1 前言》
1 前言
2011 年 8 月 16 日发射的海洋二号(HY-2)卫星对全球海洋动力环境的长期、连续、高精度的动态监测,提供高精度的海面风场、海面高度和海面温度等数据产品。HY-2卫星轨道为太阳同步近圆形轨道,轨道高度为963 km和965 km,轨道倾斜角为 99.34°。与其他高度计卫星类似,轨道径向误差是高度计观测主要误差源,事实上轨道误差是构成高度计误差预算的主要组成部分。HY-2卫星事后精密轨道径向精度预算指标为10 cm。
双频全球定位系统(GPS)数据应用于低轨卫星轨道确定将近30年了,目前这项技术在国际上已经得到相当可观的发展,已成为 TOPEX/Poseidon (T/ P)、ENVISAT、Jason-1和Jason-2等卫星主要厘米级定轨手段之一[1~4] 。HY-2卫星搭载的双频GPS接收机为国内自主研制,双频 GPS 精密定轨作为 HY-2 卫星的主要定轨方案之一,本文分析了双频GPS接收机基本性能,并给出了初步双频 GPS 定轨精度结果。
《2 星载GPS精密定轨原理及策略》
2 星载GPS精密定轨原理及策略
《2.1 星载GPS精密定轨原理》
2.1 星载GPS精密定轨原理
基于GPS的HY-2卫星精密轨道确定采用非差简化动力学方法。精密定轨方法一般包括动力学(dynamic solutions)、简化动力学(reduced dynamic solutions)以及运动学(kinematic solutions)定轨策略,其中简化动力学定轨策略实际上就是纯动力法定轨和运动学定轨两种极限情况的一种中间策略,该方法充分利用卫星的几何和动力学信息,在定轨过程中使用卡尔曼滤波器,通过将没有建模或模型不准确的加速度当作平稳的随机过程(一般为一阶 Gauss-Markov 过程模型),以此来解释观测的卫星轨道与预计的卫星轨道之间的偏离;一般来讲,简化动力学定轨方法寻求的是将局部的几何观测值改正到动态确定的、收敛的轨道解上去,从而最大限度地利用可观测性。由于 GPS 系统的特点是可以全天候获得高精度的卫星星历,采用简化动力学方法可以充分利用观测数据。GPS 数据非差处理只需要 HY-2 卫星本身的 GPS 接收数据,采用非差状态估计和非差模糊度固定进行参数估计。非差状态估计是计算非差观测数据的观测量减去计算量(OMC)及对待估参数的偏导数,然后组成法方程,对失效参数进行预测消除,对最终组成的法方程进行解算,并恢复残差和随机参数估计值。非差模糊度固定是在以非差方式进行定轨与定位数据处理中,对非差模糊度形成的双差模糊度进行整数固定,固定的双差整周模糊度作为虚拟观测值,引入观测方程与法方程,提高定轨与定位精度。非差模糊度固定是提高定轨与定位精度的关键技术之一。
《2.2 HY-2卫星双频GPS定轨流程》
2.2 HY-2卫星双频GPS定轨流程
GPS精密定轨软件流程如图1所示。
《图1》
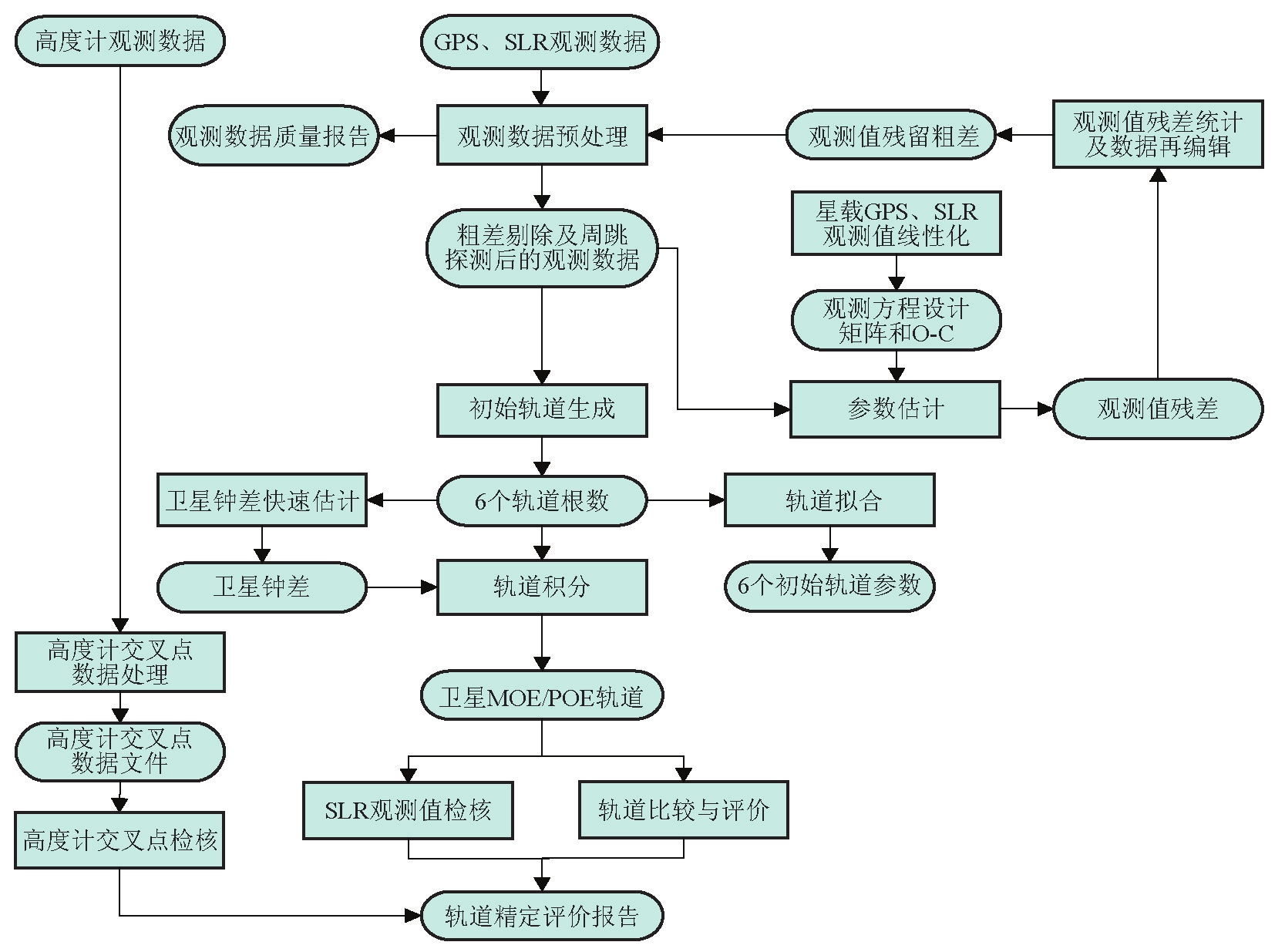
图1 GPS精密定轨软件流程图
Fig. 1 The diagram of the precise orbit determination for GPS solution
GPS观测数据进行数据预处理,并进行评价直到获取粗差剔除及周跳探测后的观测数据,调用轨道积分器获取卫星位置以及动力学偏导数,同时调用误差模型改正模块,线性化模块获取几何偏导数和预测残差,最后输入非差参数估计模块并调用非差模糊度固定模块进行参数估计;然后调用数据编辑模块,将估计模块生成的验后残差输入数据再编辑模块,获取粗差和周跳探测信息;然后进行初始轨道生成,得到轨道根数,进行卫星轨道拟合,获取 6个初始轨道参数;轨道根数进行轨道积分,获取卫星轨道。
《2.3 星载双频GPS定轨策略》
2.3 星载双频GPS定轨策略
HY-2卫星精密定轨解算的两类轨道:中等精度轨道星历(medium accuracy orbit ephemeris,MOE)和精密轨道星历(precise orbit ephemeris,POE)。 MOE 弧长 30 h,相邻弧段重叠 2 h,时效延迟 26 h; POE弧长7天,相邻弧段重叠4 h,时效延迟30天。
表1给出了在MOE和POE轨道确定中所采用力模型、数据和待估参数,其中MOE和POE轨道除数据处理时间段有所不同外,其他差异主要在所采用的GPS轨道和钟差产品不同,MOE定轨采用本软件解算的超快速GPS轨道和钟差,而POE则采用欧洲定轨中心(CODE)提供的精密轨道和钟差。
《表 1》
表 1 HY-2卫星GPS/SLR精密定轨策略
Table 1 GPS solution for POD of HY-2 satellite
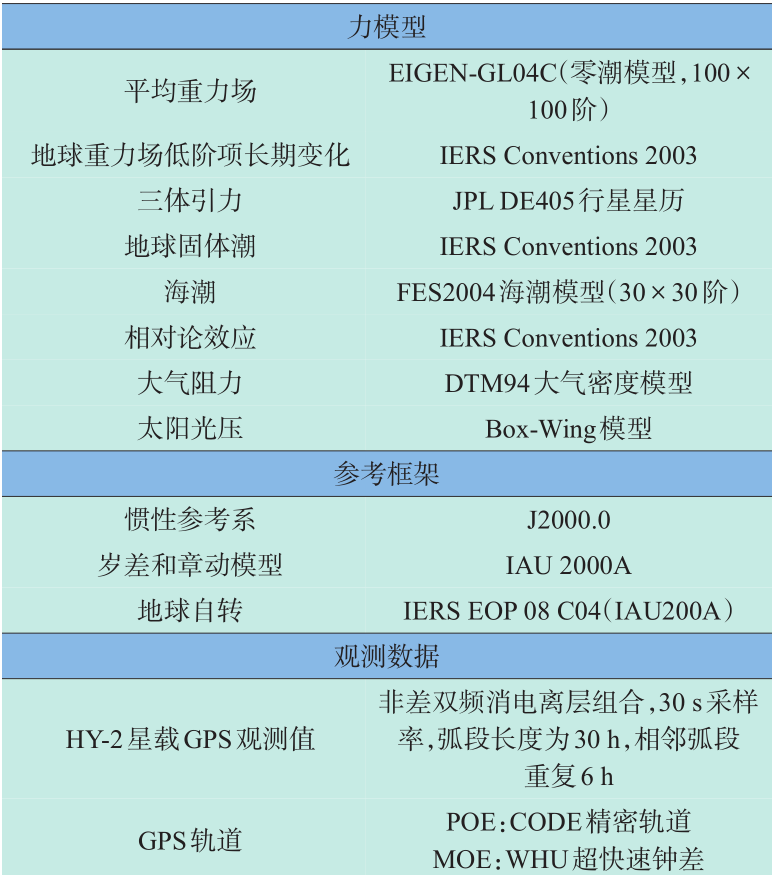

图 2~图 4 给出了 2012 年 3 月 HY-2 卫星双频 GPS数据统计分析结果。图2展示了所有观测数据双频完整性统计结果双频完整性为95.2 %,表明双频完整性很好;图3中红色、绿色代表的P1码、P2码多 路径 误差 均方 差(RMS)分别 在 0.765 m 和 0.354 m左右,多路径效应比较明显;由于形成多路径效应原因比较复杂,尚不能确定具体原因,可以通过努力消除此影响。图4统计的是L1、L2和P1、 P2的完整性,统计结果表明HY-2星载GPS数据中 L2比L1频率数据丢失较多,这主要是由于GPS系统设计时L2频率信号弱于L1频率等原因所致,此项指标反映了接收机的捕获能力。图5给出的是定轨中使用的观测数个数,此数据由不同的定轨软件和定轨策略所决定,是定轨分析的一个辅助工具。从图5中发现只有一天的统计个数低于2 000个,其他都在2 000以上,说明定轨中所使用的观测值个数属于正常范畴。
《图2》
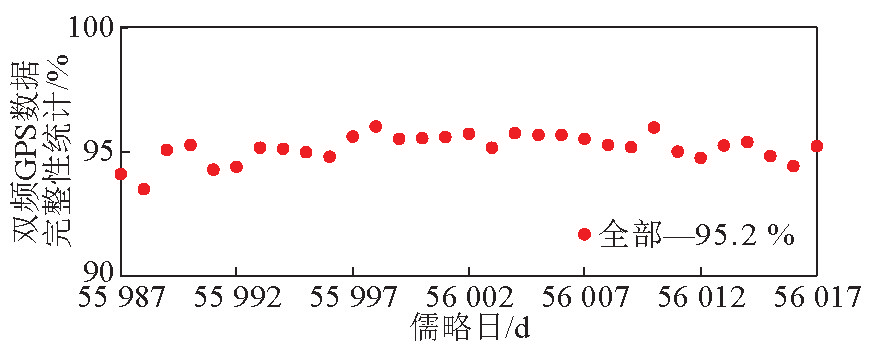
图2 所有观测数据双频完整性统计
Fig. 2 The statistics of all double-frequency GPS data
《图3》
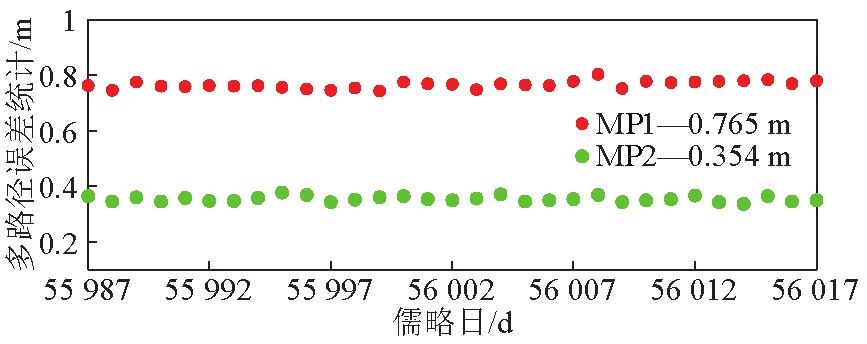
图3 所有的P1、P2码观测值多路径误差统计
Fig. 3 The measurement statistics of all P1 and P2 code
《图4》

图4 所有观测数据类型完整性统计图
Fig. 4 The statistics of all types for GPS data
《图5》
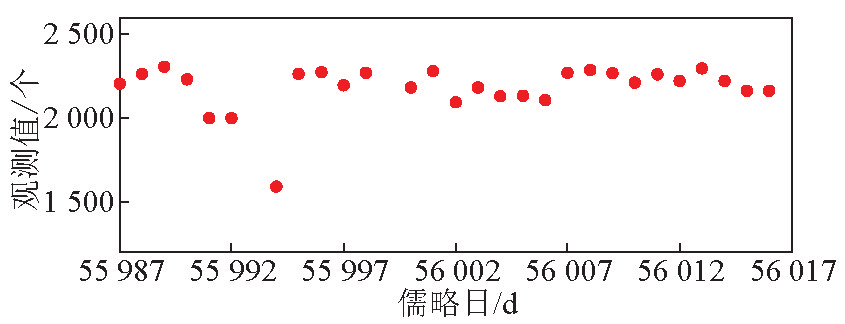
图5 所有观测值个数统计图
Fig. 5 The statistics of all number of GPS observations
《3 精密定轨结果及分析》
3 精密定轨结果及分析
这里采用卫星激光测距(SLR)检核和独立轨道比较两种方法来检验双频 GPS 确定的 2012 年 3 月 MOE 产品的精度。MOE 产品弧长 30 h,相邻轨道重叠2 h。
《3.1 SLR检核轨道精度》
3.1 SLR检核轨道精度
SLR检验轨道过程中,SLR残差作为轨道精度评价指标,SLR残差为SLR直接测得的站星距与星载 GPS/DORIS 定轨结果计算得到的站星距之差。考虑HY-2激光数据量,这里采用仰角大于60°的激光数据进行检验。
GPS和法国太空总署(CNES)DORIS定轨产品检核结果如图6和图7所示,同时表2也给出两种产品检核结果。
《图6》
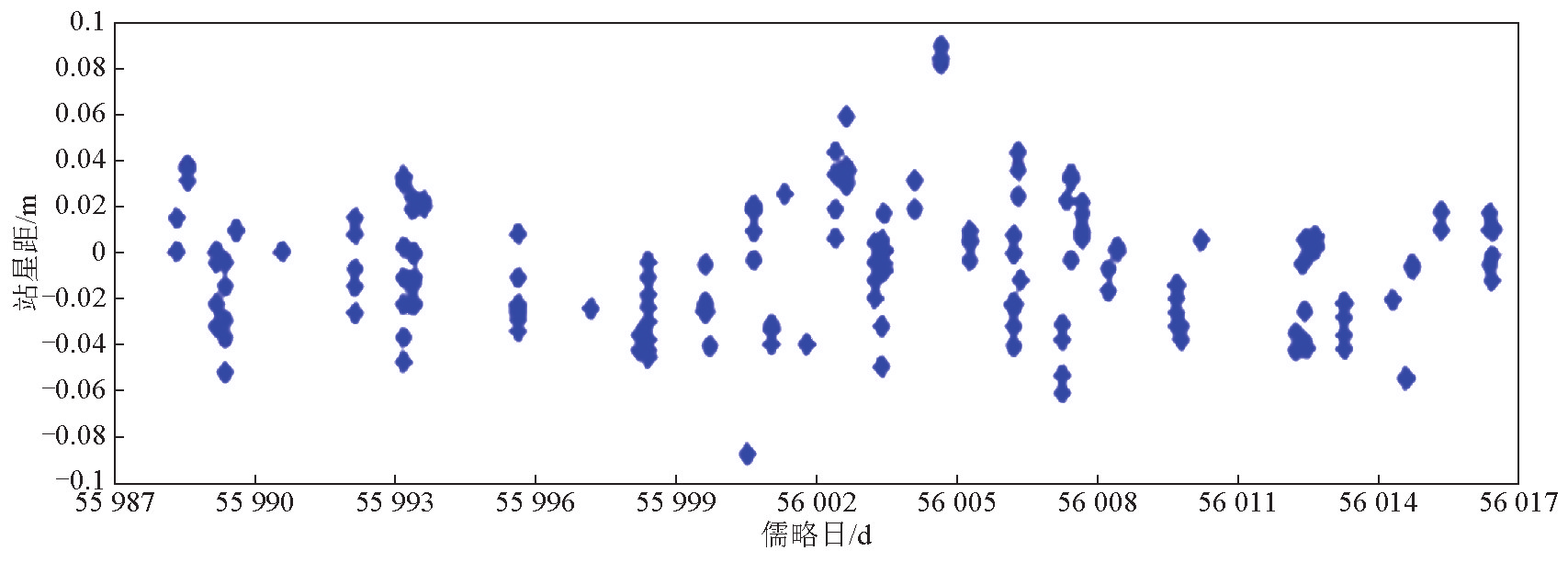
图6 GPS定轨产品SLR检核结果(2012年3月MOE)
Fig. 6 The results of SLR validation for MOE of GPS solution (March,2012)
《图7》
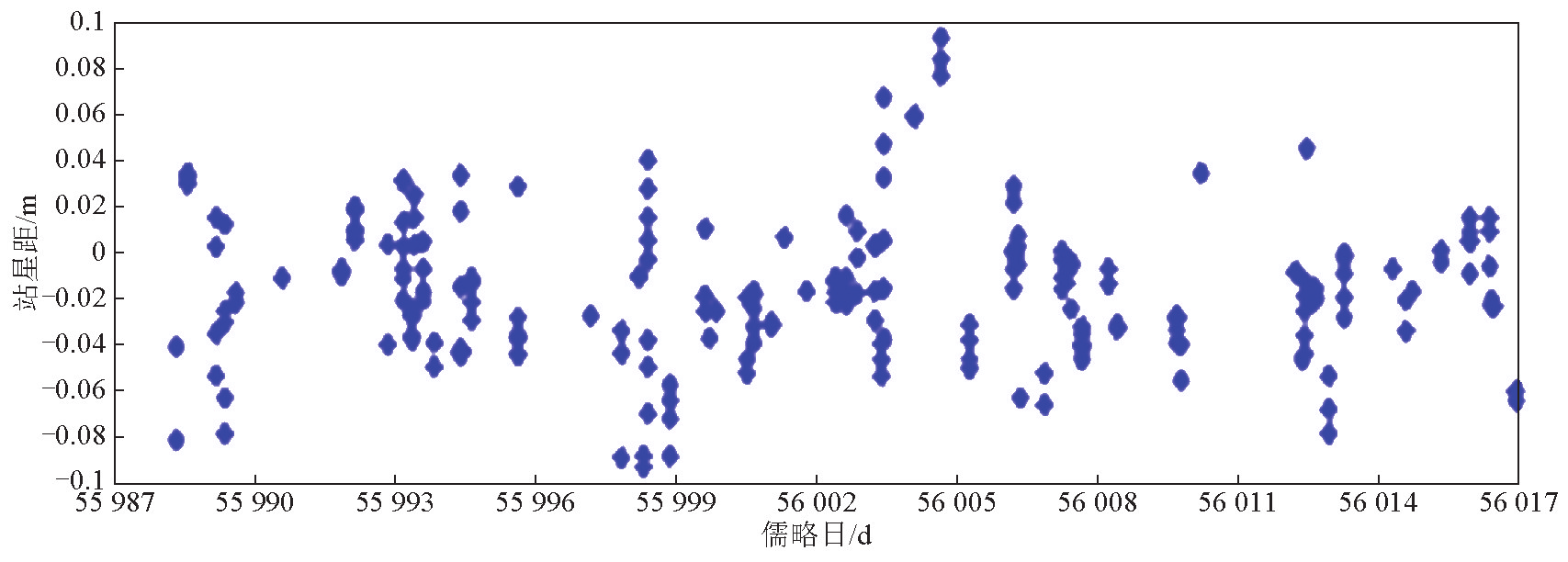
图7 法国CNES产品SLR检核结果(2012年3月MOE)
Fig. 7 The results of SLR validation for MOE of CNES (March,2012)
《表 2 》
表 2 MOE径向精度SLR检核结果
Table 2 The results of SLR validation for the radial accuracy of MOE

从SLR检核结果看,CNES DORIS定轨和国内 GPS 定轨的 MOE 精度分别为 3.43 cm 和 2.94 cm。法国 DORIS 定轨产品 MOE 径向精度优于 3.5 cm,国内GPS定轨产品优于3 cm。从结果可以看出,法国SLR检核结果均值比较大,直接影响了检核结果。
《3.2 独立轨道比较》
3.2 独立轨道比较
独立轨道是指不同机构采用不同软件计算得到的两段独立轨道比较,同时也可指采用不同类型观测数据定轨得到的两段轨道之间的比较。这里将GPS定轨产品分别与国内DORIS定轨、GPS/DORIS定轨以及法国提供的DORIS定轨产品相比较。表3给出了MOE径向精度独立机构比较结果。
《表 3》
表 3 MOE径向精度独立机构比较结果
Table 3 The comparison results for different solutions for the radial accuracy of MOE

从比较结果看出,GPS 定轨产品与法国 DORIS、DORIS和GPS/DORIS定轨产品比较径向精度分别为1.97 cm、2.65 cm和2.02 cm。独立轨道比较结果显示GPS定轨MOE径向精度优于3 cm。
《4 结语》
4 结语
通过2012年3月GPS数据统计分析得到HY-2 卫星双频数据完整性很好,可达到95.2 %;L1频率数据丢失很少,由于L2频率信号弱一些,丢失稍多一些,但仍达到95.2 %,反映了其良好的捕获能力; GPS 数据 P1 和 P2 码多路径效应比较明显,原因有待于进一步分析。
双频 GPS 定轨产品通过 SLR 检核和独立轨道比较两种方法验证,GPS 精密定轨产品精度优于 3 cm,与国际水平相当。











 京公网安备 11010502051620号
京公网安备 11010502051620号




