
《1 引言》
1 引言
移动卫星通信是卫星通信的发展方向,它不但是未来军事斗争中的主要通信手段,也是日益发展的民用卫星通信所追求的目标。国外关于移动卫星天线系统的鲁棒性研究正在深入展开,而我国在这方面研究的还处于初期阶段。关于移动卫星天线数学模型方面,采用的都是直流电动机线性定常模型。模型中没有考虑系统参数不确定性变化和外界环境的干扰力矩[1 ~ 4] 。现有移动卫星天线跟踪系统大都采用经典的 PID 控制方法,控制器设计中往往回避了系统中参数不确定性变化和外界环境带来的干扰力矩的影响因素,因而对系统参数不确定性变化、互相耦合和由于车船运行中的振动、摇摆,路面不平等带来的干扰力矩没有好的抑制作用[3 , 4] 。移动卫星天线跟踪系统担负时效性要求较高的任务,它需要在载体不停的摇摆以及转向中实时的保证天线对准卫星。载体在运动过程中的不确定性变化使得系统具有时变非线性和不确定性、容易受到外界干扰因素影响,如何提高天线系统鲁棒性是移动卫星天线控制工程中的一个重要研究课题。
在移动卫星天线系统模型的基础上,设计一种基于  鲁棒控制设计的移动卫星天线控制系统。所提出的控制算法在移动卫星天线试验平台上进行了试验,验证了这种方法的有效性,表现了较好的控制性能。
鲁棒控制设计的移动卫星天线控制系统。所提出的控制算法在移动卫星天线试验平台上进行了试验,验证了这种方法的有效性,表现了较好的控制性能。
《2 移动天线系统模型》
2 移动天线系统模型
移动卫星天线具有水平方位角  和垂直俯仰角ε两个自由度,每个自由度分别由一套直流电动机伺服系统加以驱动。每套机构组成见图 1 。
和垂直俯仰角ε两个自由度,每个自由度分别由一套直流电动机伺服系统加以驱动。每套机构组成见图 1 。
《图 1》
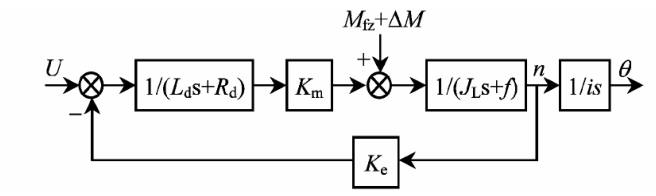
图 1 卫星天线模型
Fig.1 The system model for satellite antennas
图 1 中, U 为加在直流电动机电枢上的电压, Rd 为电枢绕组电阻, Ld 为电枢绕组电感, Km 为电动机力矩系数, Ke 为直流电动机反电动势常数。 JL 为电机变速机构和负载折合到电动机轴上的转动惯量,  为电机变速机构和负载折合到电动机轴上的粘性摩擦系数, n 为转速,
为电机变速机构和负载折合到电动机轴上的粘性摩擦系数, n 为转速, 为角位移,代表天线旋转方位角
为角位移,代表天线旋转方位角  和高低俯仰角
和高低俯仰角  。 Mfz 是由于饱和、摩擦、齿隙、非线性弹性形变、路面不平、车辆运行振动、负载不确定性等等因素产生的并等效到电机输出轴上的负载干扰力矩。Δ M 是考虑天线旋转方位角 和高低俯仰角 之间互相耦合关联的干扰力矩。 JL ,, Mfz ,Δ M 是非线性不确定变化干扰量,对移动卫星天线跟踪控制系统的稳态、动态性能产生较大的影响。由图 1 可得其微分方程为
。 Mfz 是由于饱和、摩擦、齿隙、非线性弹性形变、路面不平、车辆运行振动、负载不确定性等等因素产生的并等效到电机输出轴上的负载干扰力矩。Δ M 是考虑天线旋转方位角 和高低俯仰角 之间互相耦合关联的干扰力矩。 JL ,, Mfz ,Δ M 是非线性不确定变化干扰量,对移动卫星天线跟踪控制系统的稳态、动态性能产生较大的影响。由图 1 可得其微分方程为

式中  均是非线性不确定变化量,有些量值很大,影响不能忽略。上式可写成状态方程形式:
均是非线性不确定变化量,有些量值很大,影响不能忽略。上式可写成状态方程形式:
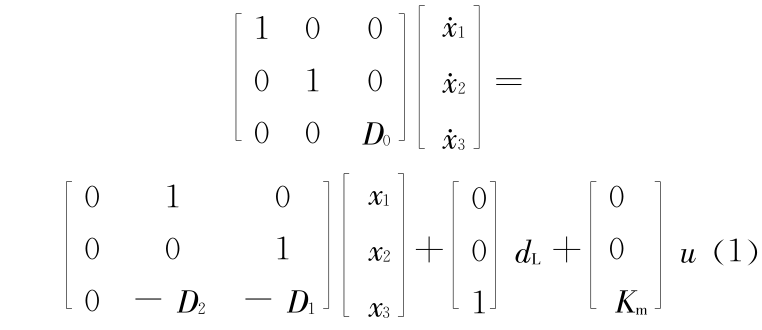
式中 X = [ x1 x2 x3 ] T , x1(t)=(t), x2(t)= (t), x3(t)=
(t), x3(t)= , D0= JL Rd , D1 = JL Rd +
, D0= JL Rd , D1 = JL Rd +  ,D2 = + JKm Ke , dL = Ld (
,D2 = + JKm Ke , dL = Ld ( )+ Rd(Mfz +Δ M), u 为控制器输出, dL 为负载、耦合及路面等干扰, D0 ,D1 ,D2 为被控对象本身的非线性不确定性变化量,分别在以下范围:
)+ Rd(Mfz +Δ M), u 为控制器输出, dL 为负载、耦合及路面等干扰, D0 ,D1 ,D2 为被控对象本身的非线性不确定性变化量,分别在以下范围:

《3 移动天线跟踪系统》
3 移动天线跟踪系统
移动卫星天线跟踪系统由 GPS 接收部分和跟踪控制部分组成,见图 2 。
《图 2》
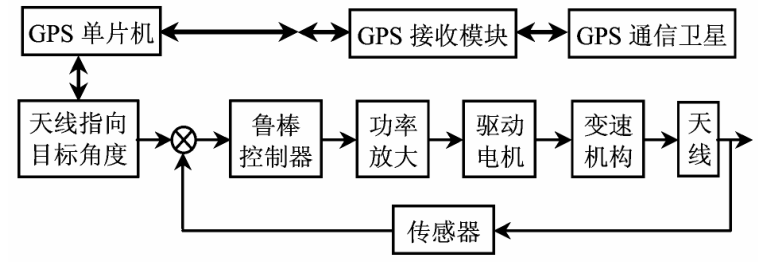
图 2 卫星天线控制系统
Fig.2 The control system for Satellite antennas
接收部分的接收模块接收 GPS 发来的车船此刻的位置、速度和加速度状态量,通过异步串口通信传给 GPS 单片机。 GPS 单片机进行数据筛选、滤波、整理和计算后,将结果通过异步串口通信传给跟踪控制计算机。跟踪控制计算机用此值计算出车船上的卫星天线对准卫星的期望水平方位角 和垂直方向上的期望俯仰高低角
和垂直方向上的期望俯仰高低角  。同时将期望值与用传感器测量的车船行驶水平方位角
。同时将期望值与用传感器测量的车船行驶水平方位角  和垂直俯仰角
和垂直俯仰角  两个自由度上的实际角度、角速度、角加速度量进行比较得到误差,计算机对此误差用鲁棒控制算法处理,得到控制信号 u(t)后功率放大控制伺服系统驱动电动机,转动天线使得天线中心轴始终对准卫星,确保车船在行驶过程中完好接收卫星信号。
两个自由度上的实际角度、角速度、角加速度量进行比较得到误差,计算机对此误差用鲁棒控制算法处理,得到控制信号 u(t)后功率放大控制伺服系统驱动电动机,转动天线使得天线中心轴始终对准卫星,确保车船在行驶过程中完好接收卫星信号。
《4 鲁棒控制器》
4  鲁棒控制器
鲁棒控制器
下面以移动卫星天线方位角控制为例,设计 鲁棒控制器。从式(1)可以看出,这是一个含有非线性不确定性变量的时变数学模型,其中 D0,D1, D2 均是不确定性变化且不易测量。为了避免扩大参数摄动范围,减少保守性,采用最大秩分解法进行处理,将摄动参数分离。将式(1)用含 3 个摄动参数 δ1 ,δ2 ,δ3 的描述符系统表示:

其中 X  状态向量,
状态向量,  为控制输入量, y
为控制输入量, y  为量测输出向量,
为量测输出向量,  为评价输出向量,
为评价输出向量,  为干扰向量。 d = [ dL
为干扰向量。 d = [ dL 
 ] T , e = [
] T , e = [  ] T , y = [ x1 + ξ1 x2 + ξ2 ] T ,其中,
] T , y = [ x1 + ξ1 x2 + ξ2 ] T ,其中, 和
和 分别为角度和角速度的期望值,ξ1 和 ξ2 分别为 x1 和 x2 的观测噪声。考虑 ξ 的目的在于通过给 ξ 加上适当的加权函数,表示模型降阶时忽略高阶共振模对系统的影响并加以鲁棒补偿,进而得到:
分别为角度和角速度的期望值,ξ1 和 ξ2 分别为 x1 和 x2 的观测噪声。考虑 ξ 的目的在于通过给 ξ 加上适当的加权函数,表示模型降阶时忽略高阶共振模对系统的影响并加以鲁棒补偿,进而得到:

在式(2)中记

其中 D0 S ,D1 S , D2 S 分别为不确定性变化量 D0 , D1 , D2 的标称值。在控制器设计时使用以下摄动幅度:Δ1 = D0 S ×(0.86 %),Δ2 =D1 S ×(0.43 %),Δ3 = D1 S ×(0.75 %),则:
E0= diag {1 1 D0 S}, E1 = diag {0 0 Δ1}, E2 = 0 , E3 = 0 , B =[0 ,0 , Km ]没有摄动,

作如下分解:

因左侧矩阵的秩为 qi ,分解时保证  , Ri ,
, Ri ,  ,
,  ,即将非满秩矩阵分解为列满秩和行满秩矩阵的乘积,
,即将非满秩矩阵分解为列满秩和行满秩矩阵的乘积,

定义给定传递函数 K(s)和Θ(s),则关于 K(s)和Θ(s)的线性分式变换式为

其中 
系统式(2)可用具有独立参数特征的模型

描述。其中:

对于系统式(1)Δ= diag {δ1 δ2 δ3 },系数矩阵 GP 可通过式(6)求得。在

中,取关于频率 ω 的上确界,给出  的上界是关于控制器和定标矩阵 D(s)2 个参数的最小值。
的上界是关于控制器和定标矩阵 D(s)2 个参数的最小值。
进行μ综合设计时使用 D - K 迭代法,逐次用 D 和 K 进行最小化。用 Matlab 鲁棒控制工具箱中的 dkit 程序递推 2 次达到 ‖( DF1 (GP,K)· D -1 )‖ ∞ = 0.96 ,第三次时,性能没有显著改善,所以采用第二次递推时的控制器。然后用 Matlab 中的 balreal 和 modred 函数进行降阶处理,得到一个三阶控制器:

取抑制参数摄动加权函数 W(s)、负载干扰加权函数 Wd(s)和输入加权函数 Wu(s)为
计算时采用表 1 所示的移动卫星天线实验台基本参数。K(s)控制器的 Bode 图见图 3 。
《表 1》
表 1 天线实验台基本参数
Table 1 Experimental devices

《图 3》
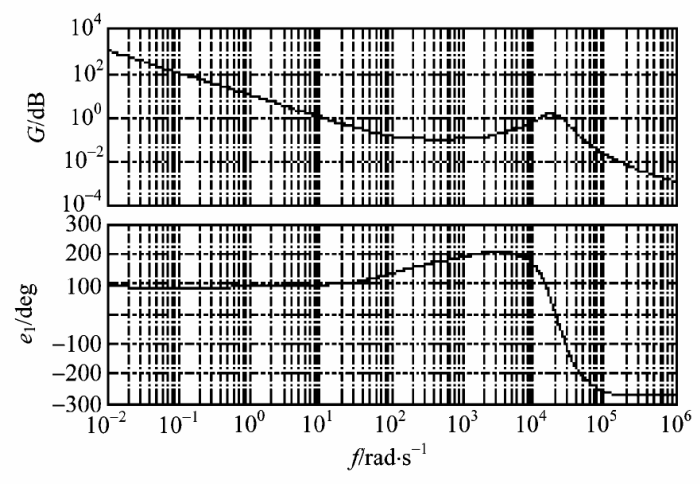
图 3 鲁棒控制器 Bode 图
Fig.3 Bode figure for the robust controller
《5 实验结果》
5 实验结果
移动卫星天线试验平台上,有方位角和俯仰高低角二套控制系统,分别对水平方位角,俯仰高低角实施跟踪控制。每套驱动执行机构由功率放大级、直流电动机和角度、角速度、角加速度传感器等组成。其中控制系统需要对长时间行驶积累的传感器累积误差定时修正。
将实验移动卫星天线安装在一个可移动平台上(见图 4)。移动平台既可原地转动 360°,还可以行走。通过移动平台行走在不同路面情况下转动方位角和高低俯仰角,以此检验移动卫星天线控制系统的自动跟踪控制效果,并与 PID 情况进行比较。实验台的基本参数见表 1 。鲁棒控制器的控制输入量计算见式(8)、式(9)。
《图 4》
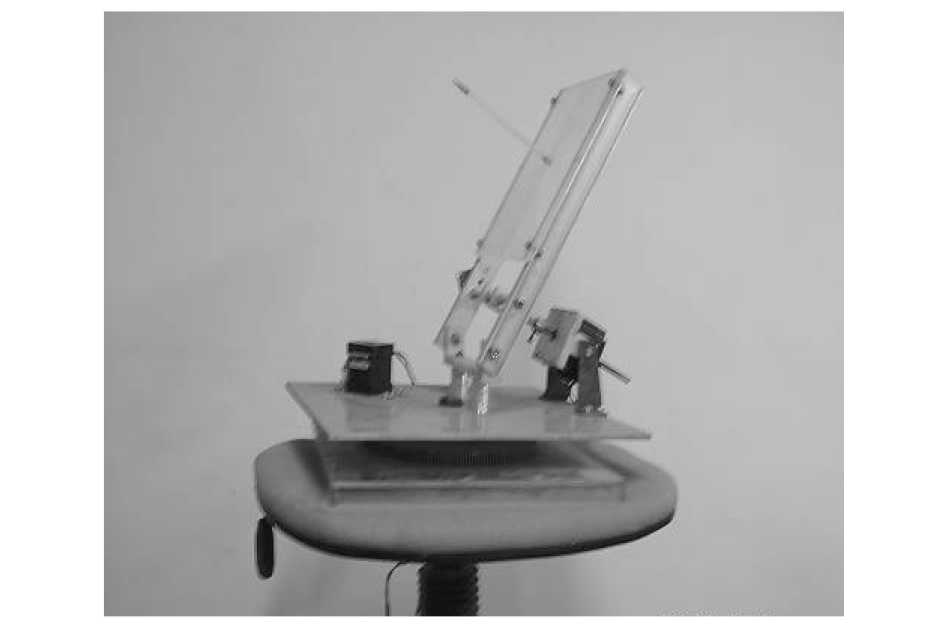
图 4 实验移动卫星天线
Fig.4 Experimental devices
实验时移动平台先在平坦路面上行驶,而后开始以水平匀速角速度 n = π/4 rad/s 转动可移动平台的水平方位角。这时移动卫星天线自动纠正偏差。角位移误差 e1(t)变化较快衰减为 0 ,性能满足要求。垂直俯仰高低角角位移跟踪误差 e1(t)同样变化,性能满足要求。用 PID 控制器控制移动卫星天线,其水平方位角位移跟踪误差变化性能也满足要求。
但当突然使移动平台行走在一边高一边低凹凸不平的道路时,与在平坦路上做同样实验进行比较。这时道路状况改变了,路面起伏不平,控制器所有控制器参数都不做任何改动。采用鲁棒控制的水平方位角位移跟踪误差变化实测曲线见图 5a 曲线,可以看出这时的角位移跟踪误差 e1(t)衰减较快,变化相对较小,满足性能指标的要求。而用 PID 算法控制的移动卫星天线系统水平角位移跟踪误差 e1(t)变化的实测曲线见图 5b 。
《图 5》
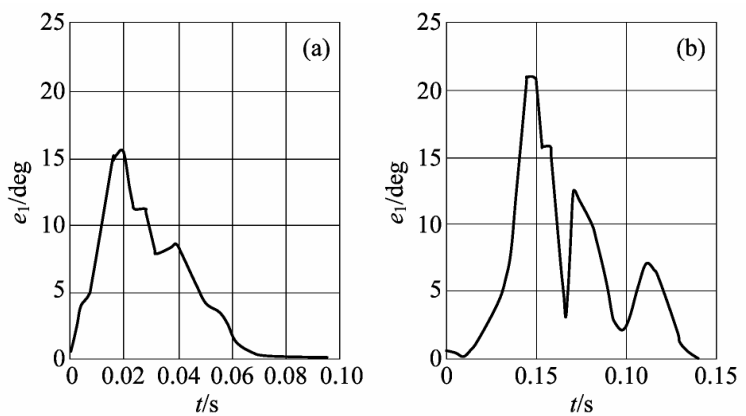
图 5 方位误差变化实测曲线
Fig.5 Experimental results of the errors
从图 1b 中可以看出 PID 的实测曲线摆动较大,衰减较慢。由此可见,基于 鲁棒控制设计的移动卫星天线控制系统,提高了天线系统对各种路面的适应能力。
鲁棒控制设计的移动卫星天线控制系统,提高了天线系统对各种路面的适应能力。
《6 结论》
6 结论
基于 鲁棒控制设计的移动卫星天线控制系统对天线系统和电机具体参数的不确定性非线性变化、互相耦合和外界各种路面、振动摇摆的干扰力矩的敏感性较低,具有较好的鲁棒性。它改善了系统响应特性,提高了系统对外界各种环境路面、海洋状况的适应能力。试验结果验证了这种方法的有效性。











 京公网安备 11010502051620号
京公网安备 11010502051620号




