《1 引言》
1 引言
过渡区概念的提出最早是在 20 世纪 30 年代,随后的应用主要集中于天体物理以及材料学等领域[1~4]。直至 1979 年,由 J. S. Weszka,A. Resenfeld 等人首次将过渡区理论引入图像分割中[5]。 20 世纪 90 年代后,章毓晋等对该理论做了较为全面的叙述[6,7],指出过渡区是指图像中介于目标和背景之间的区域,它是一个特殊的区域,既有边界的特点,将不同的区域(前景和背景)分开;又有区域的特点,其自身有宽度并且面积不为零。基于过渡区提取的图像分割是近年来才兴起的一种分割方法[7],该方法的基本思想是首先按照某种准则提取图像过渡区像素,然后使用过渡区像素的灰度均值或直方图峰值位置对应的灰度值作为分割阈值。所以,过渡区提取的好坏会直接影响到分割阈值的准确性以及最终分割结果的优劣[8~15]。
笔者对图像过渡区提取的传统方法以及近年来出现的一些新方法进行分析,并简要讨论其适用情况和提取效果以及这些算法的差异,归纳为两大类:基于梯度的方法和基于非梯度的方法。
《2 梯度法提取》
2 梯度法提取
梯度法是基于灰度幅度的运算,与像素灰度值的大小密切相关,利用灰度上下界限得到一定的像素构成过渡区。大致分为 5 种:有效平均梯度法(EAG);高梯度象元法;度信息法;小波变换法;数学形态学方法。
《2.1 有效平均梯度法(EAG)》
2.1 有效平均梯度法(EAG)
文献[7]中提出过渡区可借助于对图像有效平均梯度的计算和对图像灰度的剪切操作来确定。设有一幅图像 I ,用 表示像素
表示像素 的灰度,其中
的灰度,其中 属于表示像素空间坐标的整数集合 S ,用
属于表示像素空间坐标的整数集合 S ,用 表示图像的梯度。有效平均梯度 EAG 的定义为
表示图像的梯度。有效平均梯度 EAG 的定义为

其中  为梯度总和,
为梯度总和, 是梯度不为零的像素总数。
是梯度不为零的像素总数。
按如下方式定义灰度剪切变换函数[16,17]:
高端剪切函数

低端剪切函数

其中 L 为在 0 ~255 之间变化的灰度值。
使用上述函数对图像进行剪切变换,对剪切变换后的图像计算其有效平均梯度,就可以得到 2 种剪切下的 EAG(L)– L 曲线,即 EAGlow(L)– L 与 EAGhigh(L)– L ,如图 1 所示。
《图 1》

图 1 EAG(L)– L 曲线图
Fig.1 Graph of EAG(L)– L
典型的 EAG(L)– L 曲线为单峰曲线且各有一个极值。由 EAGlow(L)– L 曲线得到的极值点对应的灰度值记为 Llow ,由 EAGhigh(L)– L 曲线得到的极值点对应的灰度值记为 Lhigh,即

过渡区即是图像中灰度值介于 Llow 与 Lhigh 之间的像素构成的二维集合:

过渡区示意图如图 2 所示,其中 T 为分割阈值[18 ~21]。
《图 2 》
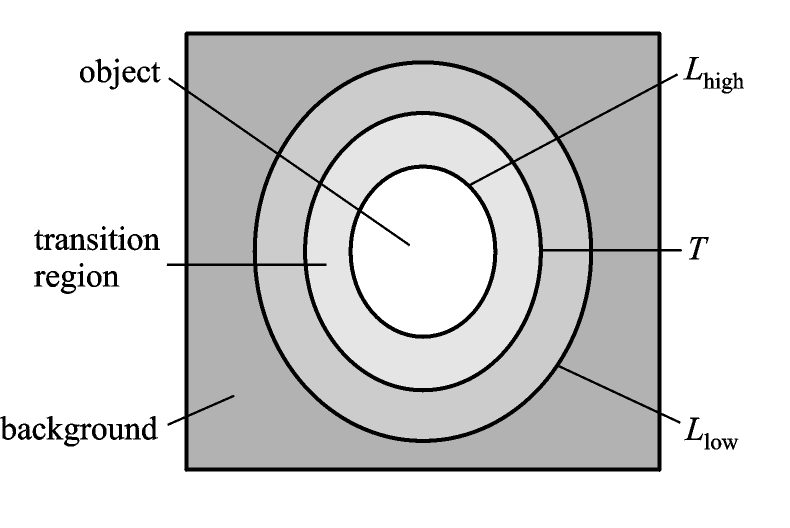
图 2 过渡区示意图
Fig.2 Sketch map of transition region
有效平均梯度法得到的 EAG(L)– L 曲线波动较大,而且会出现 Llow > Lhigh 的情况,因此过渡区的确定并不稳定。为了消除图像中随机噪声对 EAG(L)– L 曲线的影响,可以考虑使用高斯函数对剪切图像的梯度数据进行加权[14,22 ~26],即是加权的有效平均梯度法(W -EAG):

其中 为加权后的梯度, u 和 σ2 分别为高斯函数的均值和方差。对梯度进行加权后,再对求有效平均梯度以及 EAG(L)– L 曲线。
为加权后的梯度, u 和 σ2 分别为高斯函数的均值和方差。对梯度进行加权后,再对求有效平均梯度以及 EAG(L)– L 曲线。
该方法得到的 EAG(L)– L 曲线比采用 EAG 法得到的曲线要平滑,提高了过渡区灰度上下限值的准确性,但是由于使用了梯度算子,因而仍会受到噪声的影响,并且也有可能出现 Llow > Lhigh 的情况。另外,高斯函数的均值和方差需经优化过程得到,从而增加了算法的复杂度。尽管如此,加权的有效平均梯度法仍是过渡区提取算法中效果较好的一种。
《2.2 高梯度像元法》
2.2 高梯度像元法
采用 EAG 以及 W -EAG 方法提取过渡区时都需要预先计算出决定过渡区的 2 个灰度值 Llow 与 Lhigh,这是一种间接的提取方法。高梯度像元法不需要预先计算 2 个灰度界限值[27,28],而是直接提取高梯度像素作为过渡区。使用梯度算子对图像进行梯度运算可以得到变换后的梯度图像,将梯度图像中的高梯度像元提取出来可以得到具有一定属性的像素。高梯度像元法的过渡区提取归纳如下:
对上述图像 I 进行梯度运算,给定适当的梯度门限 Tg ,则梯度值大于该门限的像素构成的区域即为图像的过渡区

高梯度像元法对非噪声图像的分割效果比较好,但是对含噪声图像效果就较差[29]。由于梯度算子对噪声很敏感[30,31],因而使得过渡区的提取效果极不理想。
《2.3 度信息法》
2.3 度信息法
基于图论的图像分割方法近年来引起了人们越来越多的兴趣。它运用图论知识来解决图像分割中的问题,常见的方法有 Normalized Cut 方法、最小生成树(MST)法以及基于主集(dominate set)的方法等[32]。它们的一个共同特点就是将图像中的像素看作特征点,然后应用聚类或者分组的方法对这些点进行划分。以 Normalized Cut 方法为例,它是在 1997 年由 J. B. Shi 与 J. Malik 提出用于解决图像分割与聚类中的问题。令 G =(V,E)为一个无向图,V 为图的节点集,E 为边集,图的节点总数为 N =|V |,节点 vi 的度 di 为与该节点相连的边的数目。若图 G 为带权图,边  的权为
的权为  ,则节点 vi 的度为与该节点相连的边的权值之和[33,34],即
,则节点 vi 的度为与该节点相连的边的权值之和[33,34],即

式中 为与节点vi 相连的边数。若 = 1,则有 di = k 。
为与节点vi 相连的边数。若 = 1,则有 di = k 。
在基于图论的图像分割方法中,像素之间的相似度函数一般定义为

其中 为两像素之间的欧几里德距离。对于灰度图像,可以是像素之间的灰度差或坐标差。为了计算简单,采用如下定义的相似度函数:
为两像素之间的欧几里德距离。对于灰度图像,可以是像素之间的灰度差或坐标差。为了计算简单,采用如下定义的相似度函数:

其中  为尺度参数,
为尺度参数, 为像素间灰度值的欧几里德距离。
为像素间灰度值的欧几里德距离。
将一幅图像映射为一个带权的无向图 G =(V,E),像素集被看作节点集 V ,边缘集被看作边集 E ,则像素的度可由式(9)计算,并具有如下特点: a. 目标内部与背景内部像素的度值较大,一般来讲,由于目标内部与背景内部像素的同质性较好,灰度较均匀,因此像素之间的相似度较大,计算出的权值就大,作为权值和的度值就较大;b. 过渡区像素的度值较小,过渡区像素位于目标与背景之间,灰度变化频繁,像素之间的相似度小,度值自然就小。
基于度分布的上述特性,可以使用度作为测度参数提取过渡区。将度值小于某一阈值的像素提取出来,并由这些像素构成过渡区,再使用这些像素的灰度直方图峰值作为阈值分割图像。在具体运算中,直接使用某一度值作为过渡区提取阈值可能会导致提取的像素个数不稳定,可以将度值按升序排列,并设定过渡区像素占整幅图像素的百分比为 p 。将 p 以内的像素提取出来,即可得到稳定数目的像素构成过渡区。
《2.4 小波变换法》
2.4 小波变换法
复杂场景下的目标分割对自动目标识别有着极为重要的意义[34,35]。为了设计符合纹理背景图像的过渡区提取,首先对纹理背景下过渡区的像素灰度分布特性进行分析,一般具有如下特征:a. 目标与背景之间的像素灰度变化频繁且幅度较大;b. 目标与背景之间的像素具有一定的纹理特性。上述 2 点均要求所设计的过渡区参数能充分体现出过渡区的高频特性,为此构造小波能量比参数用于图像过渡区提取[36]。
对图像进行离散小波变换后,可得到 4 个变换图像,分别反映了原图像的低频成分,用 A 表示,以及原图像在水平、垂直和 45° 三个方向的高频成分,用 H 1 ,H 2 ,H 3 表示。为了计算每个分量所包含的能量,定义如下的能量函数:


其中 m ×n 为像素个数。
定义小波能量比参数

由上述小波能量比参数的定义可以看出,该参数反映的是原图像中高频成分与低频成分的一种比值关系。纹理背景尽管灰度变化频繁,但其变化幅度较小,高频分量不会太大,目标内部像素由于同质性好小波能量比参数值也较小,而过渡区像素灰度不仅变化频繁,而且变化幅度较大,包含了丰富的高频分量,小波能量比参数的值必然就大,由此即可以将纹理背景下的过渡区提取出来。
使用小波变换法提取纹理背景图像的过渡区,克服了以往过渡区直接提取方法的不足,取得了较好的分割效果[37]。缺点是该方法不适用于高频成分突出的纹理背景。自然场景形成的纹理背景一般灰度变化频繁但幅度变化不大,因而不会出现提取大量纹理背景作为过渡区的情况,也就不会出现过渡区的太大偏移。另外,小波能量比的计算时间较长,如何提高算法的运算速度值得进一步研究[38,39]。
《2.5 数学形态学方法》
2.5 数学形态学方法
形态学的基础是作用于物体形状的非线性算子的代数,它在很多方面都要优于基于卷积的线性代数系统在数字图像处理方面,与其他标准算法相比,形态学方法具有较好的处理效果。这也是形态学愈来愈受到关注的原因。数学形态学提供了基于形状的处理方法,适用于机器视觉的识别处理,并由于其并行快速易于硬件实现而颇受关注[40~44]。过渡区的确定过程虽然无需预先设定任何参数,完全是一个自适应搜索过程,但对含有噪声的图像,噪声会使有效平均梯度曲线产生严重失真,从而导致过渡区的确定出现错误甚至无法确定。因而文献[45]提出可以借助形态学理论方法将过渡区看作一类斜坡边缘,利用中心像素邻域灰度信息,采用边缘宽度细化算法,然后利用灰度加权梯度算子对细化后的图像提取过渡区。这样就能较好地抑制图像噪声,使过渡区的提取效果更好[45,46]。
首先计算出每个像素的梯度大小和方向,然后将梯度方向从 – π 到 π 分为 8 个区域并给定像素的 3 个灰度指数和 3 个梯度指数,如图 3 所示。这里给出区域 z1 的指数定义作为示例,其他区域只需旋转一定角度即可。
《图 3》

图 3 – π 到 π 的 8 个邻域
Fig.3 8 adjacent zones form – π to π
在区域 z1 中,对于 3 ×3 邻域,中心像素的 3 个灰度指数和 3 个梯度指数分别表示为 IL,IM,IH 和 GL,GM,GH 。
根据梯度指数的取值,一个典型的斜坡边缘上的像素可分为图4所示的几种情况,对每种情况分别调整像素灰度值以完成细化。
《图 4 》

图 4 典型的斜坡边缘
Fig.4 Typical gradient edge
Case 1 GH < GM  GL,表明像素
GL,表明像素 位于斜坡边缘的上半部分,调整其灰度值 P 至
位于斜坡边缘的上半部分,调整其灰度值 P 至  :
:


Case 2 GM > GH且GM > GL,表明像素接近或位于斜坡中央部分,此时不改变像素的灰度值。这样,边缘中间线的原始位置将不会因为细化处理而发生偏移。
Case 3 GL < GM GH ,表明像素位于斜坡边缘的下半部分,调整其灰度值  至 :
至 :


其中  是一个方向补偿因子。
是一个方向补偿因子。 是灰度调整因子。式(15)的作用是减小像素的灰度值,减少的程度视 的大小而定。
是灰度调整因子。式(15)的作用是减小像素的灰度值,减少的程度视 的大小而定。
Else 不改变灰度值。
完成斜坡边缘细化处理后,再根据式(7)可确定参数 u 和 σ2 ,由此计算经细化后含噪声图像的灰度加权梯度图,进而计算灰度加权有效平均梯度曲线,提取过渡区。实验表明该细化算法比文献[46]有很大改善,利用灰度加权梯度算子提取过渡区准确性比文献[7]有较大提高。对灰度层次丰富的图像由于考虑了 方向的像素信息,因此结果相对于文献[46]也更加精确。同时,灰度加权梯度算子抗噪声性能强,过渡区提取结果较好。
方向的像素信息,因此结果相对于文献[46]也更加精确。同时,灰度加权梯度算子抗噪声性能强,过渡区提取结果较好。
《3 非梯度法提取》
3 非梯度法提取
基于非梯度法的过渡区提取主要是对图像的灰度级别进行统计,它与像素灰度的层次密切相关[47~50]。大致分为 3 种:回归分析法;基于熵的方法;复杂度法。
《3.1 回归分析法》
3.1 回归分析法
回归分析法是典型的过渡区提取非梯度算法。该方法为了消除随机噪声对 EAG(L)– L 曲线的影响,首先对原图像灰度进行一元线性拟合[51~53],在此基础上再利用高端剪切和低端剪切实现过渡区灰度和空间分布范围的确定。
设当前像素点的坐标为(m,n),其邻域为 R = ,R 是可变的邻域长度。以当前像素点为中心,沿图像中的任意方向 i 在当前像素点的邻域 R 内采样 2R +1 个像素点,各像素点的灰度值为
,R 是可变的邻域长度。以当前像素点为中心,沿图像中的任意方向 i 在当前像素点的邻域 R 内采样 2R +1 个像素点,各像素点的灰度值为 对这 2R +1 个数据利用一元线性回归处理来获取拟合直线。假设图像中有高斯噪声,则上述灰度满足
对这 2R +1 个数据利用一元线性回归处理来获取拟合直线。假设图像中有高斯噪声,则上述灰度满足 ,其中
,其中  为拟合直线的斜率,b 为拟合直线的截距,E 为符合正态分布 N(0,σ2)的随机变量,
为拟合直线的斜率,b 为拟合直线的截距,E 为符合正态分布 N(0,σ2)的随机变量, 。此时,由一元线性回归有关分析,,σ2 的估计值为:
。此时,由一元线性回归有关分析,,σ2 的估计值为:
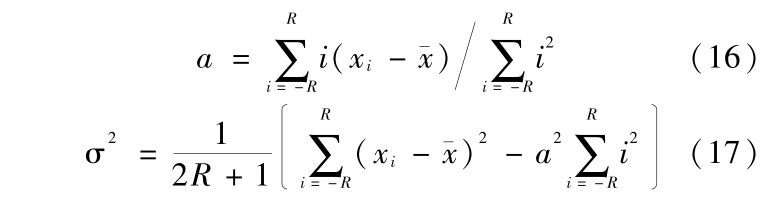
其中 。斜率 反映了该方向上邻域内的灰度突变情况。 越大,突变越剧烈,过渡区的跨度越小;反之,过渡区的跨度越大,即斜率 同时也可以反映过渡区的跨度。考虑到 具有这些特点,而且又有较好的抗噪能力,因此,选其作为过渡区的可能性度量参数是合适的[54,55]。
。斜率 反映了该方向上邻域内的灰度突变情况。 越大,突变越剧烈,过渡区的跨度越小;反之,过渡区的跨度越大,即斜率 同时也可以反映过渡区的跨度。考虑到 具有这些特点,而且又有较好的抗噪能力,因此,选其作为过渡区的可能性度量参数是合适的[54,55]。
另一个参数 σ2 则反映了邻域中各采样数据距离拟合直线的分散程度。 σ2 越大,采样数据越分散;σ2 越小,则越集中。显然, σ2 最小时,直线的拟合程度最高。根据这一原则,找出该方向上拟合程度最高的采样跨度 L 。此外,由于过渡区内像素点具有邻域方向性,即随着采样数据方向的改变 a 值将会发生较大的变化。而在非过渡区内,随着数据采样方向的改变, 值仅会出现小幅度的随机波动。也就是说,在图像过渡区内拟合直线的斜率具有明显的各向异性,而通常情况下在非过渡区内则不具有这种特性。
该方法得到的 EAG(L)– L 曲线比较平滑,但是仍会出现 Llow > Lhigh 的极端情况,并且由于引入了回归分析,增加了算法的计算量。
《3.2 基于熵的方法》
3.2 基于熵的方法
若图像中同时存在高斯噪声和椒盐噪声[56],采用基于熵的方法提取过渡区,可以较好地利用过渡区与目标区(或背景区)性质上的差异,减小噪声对算法的影响[57~59]。
给定论域 U,U 到[ 0,1 ]闭区间的任一映射为 uA ,下标 A 为映射确定的 U 的一个模糊子集,uA 称为 A 的隶属函数,uA(U)叫做 U 对 A 的隶属度。按照模糊子集理论,凡具有 L 个灰度级,大小为 M ×N 的图像均可作为模糊点集矩阵看待,则图像 表示为
表示为


其中  表示矩阵中第(M, N)个模糊单点集的隶属度为
表示矩阵中第(M, N)个模糊单点集的隶属度为 ,或者是图像第(M, N)个像素具有某种特征的程度为
,或者是图像第(M, N)个像素具有某种特征的程度为  。隶属度可按标准的 S 函数计算,S 函数如下表示:
。隶属度可按标准的 S 函数计算,S 函数如下表示:

m 和 n 表示像素在空间上的坐标, ,
, ;
; 与 c 分别代表 S 函数中模糊窗宽的下界和上界,且随所取模糊窗的不同而发生变化, b =
与 c 分别代表 S 函数中模糊窗宽的下界和上界,且随所取模糊窗的不同而发生变化, b =  熵在概率论中度量剩余信息量,在模糊子集论中可以用来度量一个模糊集合所含有的模糊性的大小,模糊集 A 的模糊熵定义为
熵在概率论中度量剩余信息量,在模糊子集论中可以用来度量一个模糊集合所含有的模糊性的大小,模糊集 A 的模糊熵定义为


其中 Sn( )为 Shannon 函数[60],
)为 Shannon 函数[60], 
 将模糊熵的概念推广到二维图像平面,得到有关图像的模糊熵
将模糊熵的概念推广到二维图像平面,得到有关图像的模糊熵

整幅图像的模糊度可以由它的模糊熵衡量,但全局模糊熵没有考虑到像素点在空间上的分布信息,不能衡量图像中局部区域的模糊性。这时需要将全局模糊熵推广到局部模糊熵[61 ~ 63]。
如果仅计算图像中一个  的小邻域
的小邻域  的模糊熵,此时得到的即为该邻域的局部模糊熵
的模糊熵,此时得到的即为该邻域的局部模糊熵


可见局部模糊熵的大小主要由处于邻域内的所有像素决定。
从式(19)和式(20)也可以定性地看出,由于目标(或背景)区域灰度级的分布比较集中,局部模糊熵较大,而过渡区灰度级分布比较分散,局部模糊熵较小。根据这一差异,可将过渡区从图像中提取出来[64]。
《3.3 复杂度法》
3.3 复杂度法
由上述基于熵的求解过程可以看出在计算灰度级 i 出现的概率时,该灰度级有几个像素出现就要做几次加法才能得到此灰度级出现的概率,而它所代表的灰度级实际上只有一个灰度级别。因此可用另外一种更为简单的方式代替局部熵的计算,即仅对邻域窗  内具有的灰度级别数进行统计。这种统计与局部熵反映的同样都是邻域内的灰度层次信息,称为局部复杂度[65]。
内具有的灰度级别数进行统计。这种统计与局部熵反映的同样都是邻域内的灰度层次信息,称为局部复杂度[65]。
令图像大小为 M ×N,具有 256 个灰度级,则图像的直方图可表示为:

其中 为灰度等级,
为灰度等级, 为单位冲击函数。
为单位冲击函数。
为了在统计灰度级别变化时避免将相同灰度的像素重复计数,定义如下标志函数:

由此定义灰度复杂度为[66]

该复杂度实际上是对图像范围内灰度级别变化的一种统计。当用于整幅图像尤其是大尺寸灰度图像时其统计意义并不大,因而更适用于统计图像的局部邻域内信息,即局部复杂度

针对局部复杂度的特点,就可以将该邻域的局部复杂度赋值给像素 k,然后在整幅图像上移动窗口Ωk (一般使用固定尺寸窗口,且  ),由此可得到变换后的复杂度图像。在复杂度图像中,过渡区像素由于同质性差,灰度层次丰富,将具有较高的复杂度值,而目标内部与背景内部像素同质性好,具有较低的复杂度值。由此可以设定合适的复杂度门限
),由此可得到变换后的复杂度图像。在复杂度图像中,过渡区像素由于同质性差,灰度层次丰富,将具有较高的复杂度值,而目标内部与背景内部像素同质性好,具有较低的复杂度值。由此可以设定合适的复杂度门限  ,将大于该门限的像素提取出来,就可以得到原图像的过渡区。该方法运算速度较快,缺陷是可能出现采样不足的情况[65,67]。
,将大于该门限的像素提取出来,就可以得到原图像的过渡区。该方法运算速度较快,缺陷是可能出现采样不足的情况[65,67]。
《4 总结》
4 总结
过渡区是指图像中介于目标和背景之间的特殊区域。借助于过渡区的确定进行图像分割是近年来兴起的一种分割技术。总结了已有的图像过渡区提取方法,归结为两大类:基本梯度的方法和基于非梯度的方法,并对它们的适用情况、提取效果以及存在的缺陷进行了分析。如今,基于过渡区的图像分理论已经在实际中得到一定的应用,例如在工业自动化、产品检验、文件图像处理、遥感和生物医学图像、农业工程等方面,并表现出良好的应用前景。但是,由于每种算法都是针对特定问题提出来的具有目的性,因而常常只能反映算法性能的某一方面,可以认为它们是相互补充的。对于每个算法而言,其性能也由多个因素决定,所以需要借助多个评价准则。如何选择这些准则并有机地结合起来是亟待解决的问题[68]。另外,评价的目的是为了指导、改进和提高算法的性能[69]。因此,如何构造更客观,更有效的过渡区提取算法是一个值得深入研究的课题。











 京公网安备 11010502051620号
京公网安备 11010502051620号




