
In a narrow passageway beneath the city of Louisville, KY, USA, a meter-tall robot with a yellow, rectangular body and four limbs that resemble a dog’s legs carefully descended a rocky slope. But as the robot attempted to turn, it lost its footing and tumbled down the slope, landing on its side. A modified commercial model known as ‘‘Spot,” the machine almost immediately began extending and rotating its legs, pushing against the floor of the passageway. In about 40 s, it stood upright again and resumed exploring the passage.
Operated by an international team of researchers, the robot was one of the more than 150 machines that attempted to negotiate an underground obstacle course during the September 2021 final competition of the US Defense Advanced Projects Research Agency (DARPA) Subterranean (SubT) Challenge [1]. With competitions spread over more than two years, the contest tested the ability of robots to move, navigate, map, search, and perceive in several tricky underground and industrial settings [2,3]. The goal was to stimulate development of robots for search and rescue and for combat (DARPA is part of the US Department of Defense [3]). ‘‘It is an important push into an area that robotics has shied away from,” said Andrew Petruska, assistant professor of mechanical engineering at the Colorado School of Mines in Golden, CO, USA, who did not compete in the challenge.
Robots capable of operating autonomously underground or in hazardous environments could potentially take over a variety of risky jobs now performed by humans [4]. ‘‘There are places where we have people because we do not have a machine that is capable of going there instead,” said Petruska. In mines, they could enter areas contaminated with toxic gases or prone to cave-ins. After natural disasters, robots could investigate unstable structures and pinpoint survivors. ‘‘Having an autonomous system that could go in and explore these situations would be huge,” Petruska said.
Research into such robots lagged for many years, said Geert De Cubber, senior researcher in robots and autonomous systems at the Royal Military Academy in Brussels, Belgium, who also did not participate in the challenge. ‘‘We got a wake-up call with Fukushima,” he said, referring to the 2011 tsunami and partial nuclear power plant meltdown in Japan. Japanese officials wanted to use a robot to inspect the damaged reactors, he said, but they did not have the right machine and eventually borrowed one from the United States. It was a shock, he said, that Japan, ‘‘the technologically most advanced nation in robotics, had nothing to send in there.”
Researchers have made substantial progress since then, partly because of improvements in artificial intelligence (AI), said De Cubber. And some search-and-rescue teams are using robots today. After a Florida condominium collapsed in 2021, for example, first responders deployed drones and police bomb squad robots to hunt for survivors and gauge the structure’s condition [5]. But nobody has built a fully autonomous machine that can navigate an environment as complex as the ruins of a building [6].
That gap provided the motivation for the SubT Challenge. DARPA is famous for sparking far-reaching innovations. A prime example is its 2004 Grand Challenge to create an autonomous off-road vehicle, credited with jumpstarting the development of self-driving cars [7]. ‘‘DARPA does not spend money on technologies that are going to be ready tomorrow,” said Petruska. ‘‘They look at ones that could be ready in 15 years—and try to make it seven.”
‘‘Robots do well the less uncertainty there is the environment,” said Sebastian Scherer, associate research professor at Carnegie Mellon University in Pittsburgh, PA, USA, and head of the fourthplace team, Explorer, in the SubT Challenge. However, underground environments offer plenty of uncertainty. Tunnels, caverns, and passageways can be confusing mazes. As they explore, robots continually need to assess their surroundings, which includes detecting and recognizing objects and, potentially, people nearby. For instance, if a robot comes upon a fluorescent vest, it could indicate an injured worker needing evacuation—or it could be a spare hanging in a closet. Making the task even more difficult, GPS signals do not penetrate underground, and communication with other robots and human operators may be impossible.
Entrants in the Challenge completed four rounds of competition to show what their machines could do. In the first two rounds, held in August 2019 and February 2020, the robots ventured into an abandoned mine in Pennsylvania, USA, and an unfinished nuclear power plant in Washington state, USA [8,9]. Because of the coronavirus disease 2019 pandemic, in the November 2020 third round, participants competed virtually by creating software that steered simulated robots through a computerized course [10].
In the final round, nine teams competed on a virtual circuit, and eight sent actual robots into an abandoned limestone mine that featured mock-ups of urban, tunnel, and cavern environments (Fig. 1). DARPA personnel crafted the layout to be as demanding as possible and to replicate many real-world situations [11]. Among the difficulties the robots had to contend with were staircases, drop-offs, railway tracks, passages with blank white walls, fog, pitch black caverns, steep slopes, and panels that swung down to simulate a cave-in or ceiling collapse. Scherer said he was surprised by how narrow some of the tunnels were and the presence of ‘‘a lot more colors and textures in the environment that could fool object detection systems.” As they traversed the course, robots from each team searched for around 40 targets, including cell phones, backpacks, and flashlights, as well as mannequins that represented injured people [1]. Competitors had an hour to investigate as much of the course as possible. The more targets a team’s robots found and reported to the DARPA command post during that time, the higher their score.
《Fig. 1》

Fig. 1. One of the teams in the DARPA SubT Challenge prepares its robots for the final competition, held in Louisville, KY, USA, in September 2021. The entrance to the test course is seen in the background. Credit: DARPA (public domain).
To develop vehicles for search and rescue or combat, designers must compromise, said De Cubber. A robot with large wheels can power over obstacles, for example, but is more likely to get stuck in a narrow tunnel. A smaller robot can slip through tight spaces but may not be able to scale barriers. Drones can cover more territory than ground-based robots, but they have less processing power. Scherer and his colleagues on Team Explorer overcame these limitations by using several types of robots, like all the teams competing in the finals (Fig. 2) [12]. Team Explorer’s ground robots, about 1 m tall, resemble dune buggies. To provide maximal traction, ‘‘we made the wheels as large as possible,” said Scherer. The team also employed two sizes of drones and a walking robot. Along with rolling, flying, and walking (Fig. 3) robots, some teams also included tank-like vehicles with treads.
《Fig. 2》
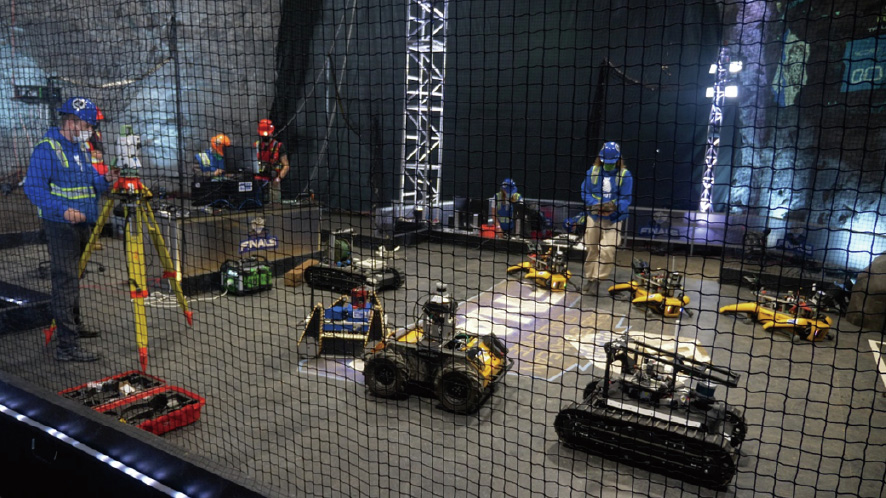
Fig. 2. An assortment of robots took on the final course in the SubT Challenge. This team’s machines include three types of tracked robots, a wheeled model, and three of the Spot walking robots. Credit: DARPA (public domain).
《Fig. 3》
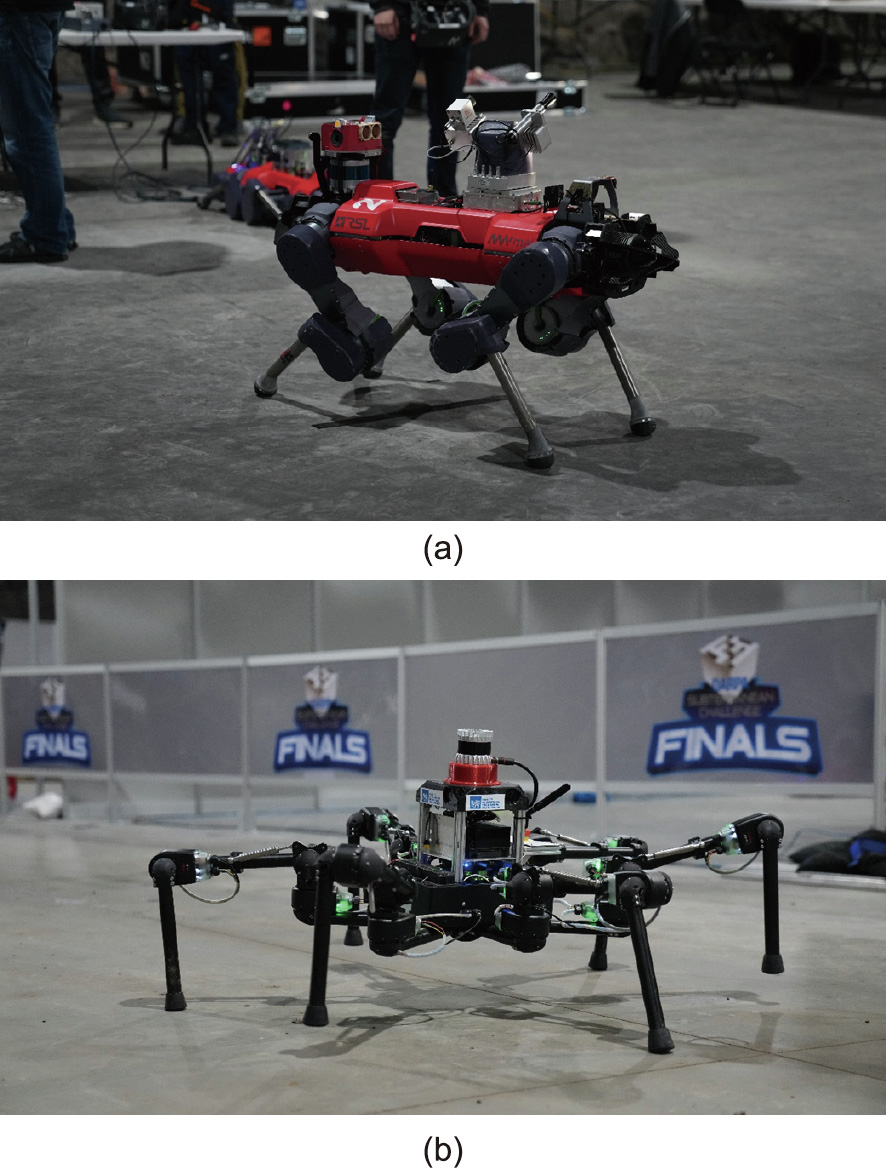
Fig. 3. (a) The robot class that showed the most improvement, experts said, was the walking robots, such as this spider-like model. (b) The four-legged ANYmal robot shown here helped Team Cerberus win the competition. Credit: DARPA (public domain).
In addition to dealing with varied terrain, the SubT teams had to devise solutions for other challenges of operating underground. Without GPS to guide them, the robots in the final competition made their own maps of their surroundings, typically using light detection and ranging (LIDAR) [13]. Robots from Scherer’s team and several other groups placed communication hubs around the course. Machines from each team could then exchange information and contact their operator, the one person allowed to direct the robots [14]. But once the robots penetrated far enough into the tunnels, they lost contact with their operators and had to proceed autonomously, Scherer said.
One quality the course tested was resilience. Some entrants, like the Spot robot that tumbled down the slope, recovered from setbacks. However, the obstacles in the final challenge stymied some of the robots [1]. They fell on railroad tracks, slipped off cliffs, retreated from fog, crashed into airborne debris, or just stopped moving, unable to decide on their next action. One baffled machine rammed into a partition again and again.
As a group, the robots of Scherer’s team made it through 93% of the course, the best mark among the competitors [1]. Three other teams, Cerberus, CSIRO Data16, and Marble, did not progress as far but reported more targets, so they placed ahead of Team Explorer in the final standings [1].
Despite these feats, the robots are not ready for search and rescue operations, De Cubber said. They are expensive, and researchers need to solve several problems, such as improving the robots’ ability to tackle rough terrain. The machines will also need to be simpler to control so that search-and-rescue crews can operate them, he added. Crews will additionally have to undergo extensive training to incorporate the robots into their procedures. De Cubber predicted that we will not see any of the SubT robots used in the field ‘‘in the next five years.” Still, the competition illustrated how far these robots have come, said Petruska. ‘‘We are getting to the point where we can make systems autonomous in a meaningful way, able to make decisions without external control.”











 京公网安备 11010502051620号
京公网安备 11010502051620号




