
2022年 第12卷 第5期
《工程(英文)》 >> 2022年 第12卷 第5期 doi: 10.1016/j.eng.2022.02.008
无人智群及其社会融合
a School of Aerospace Engineering, Beijing Institute of Technology, Beijing 100081, China
b School of Economics and Management, Beijing Institute of Technology, Beijing 100081, China
c School of Information and Electronics, Beijing Institute of Technology, Beijing 100081, China
下一篇 上一篇
摘要
协作式无人系统以其灵活高效和内在抗毁的优势,已成为应对众多重大挑战的关键手段。尤其是借助人工智能(AI)的具象实现,无人系统达到了越来越高的集群自主水平。然而,目前的网联协作式无人系统主要是为狭窄的特定领域任务而设计并只适用于这些任务。面对我们生活中具有挑战性的任务,无人系
统仍不能以匹配人类智能水平的方式来充分满足人类的需求。我们在本文中提出了一个以人为本的网联无人系统的愿景——无人智群(unmanned intelligent cluster, UnIC)。在这个愿景中,分布式无人系统和人通过知识共享和社会意识连接起来,以实现协作认知。本文详细介绍了UnIC 的概念、智能的来源、智
群的分层结构,并综述了实现这一愿景的使能技术。除了技术方面,本文也从一般意义上关注了无人系统的社会接受问题。
图片

图1
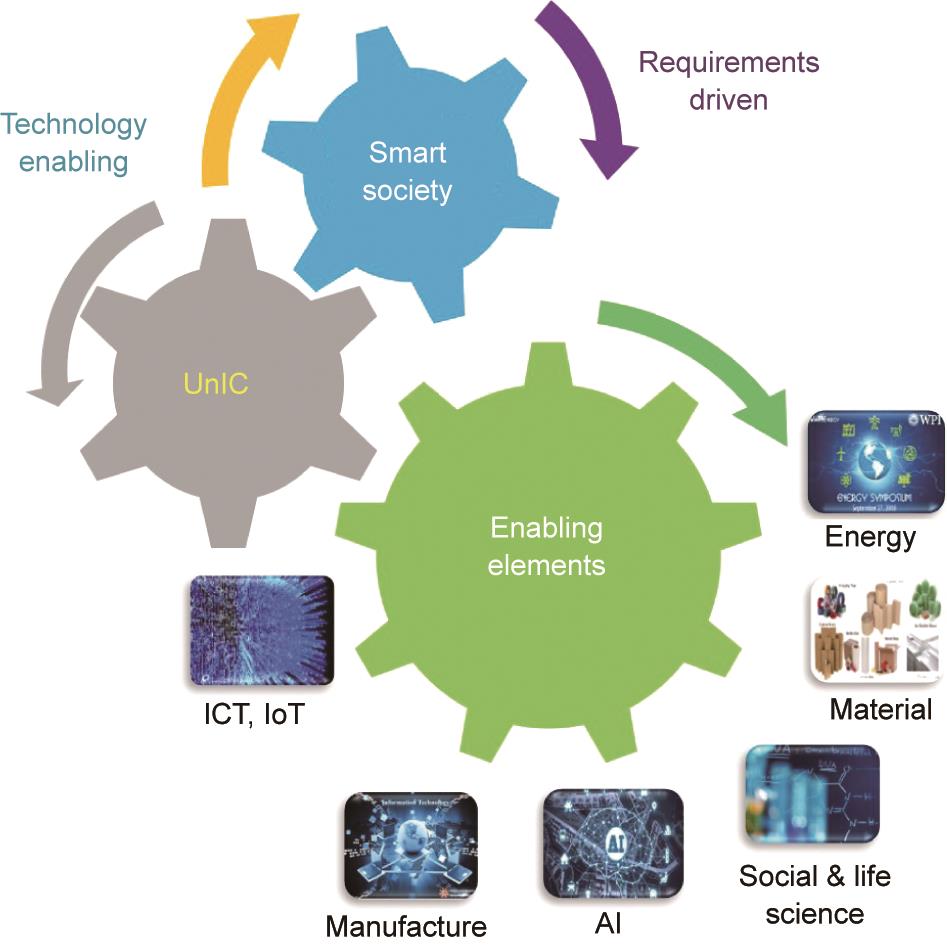
图2
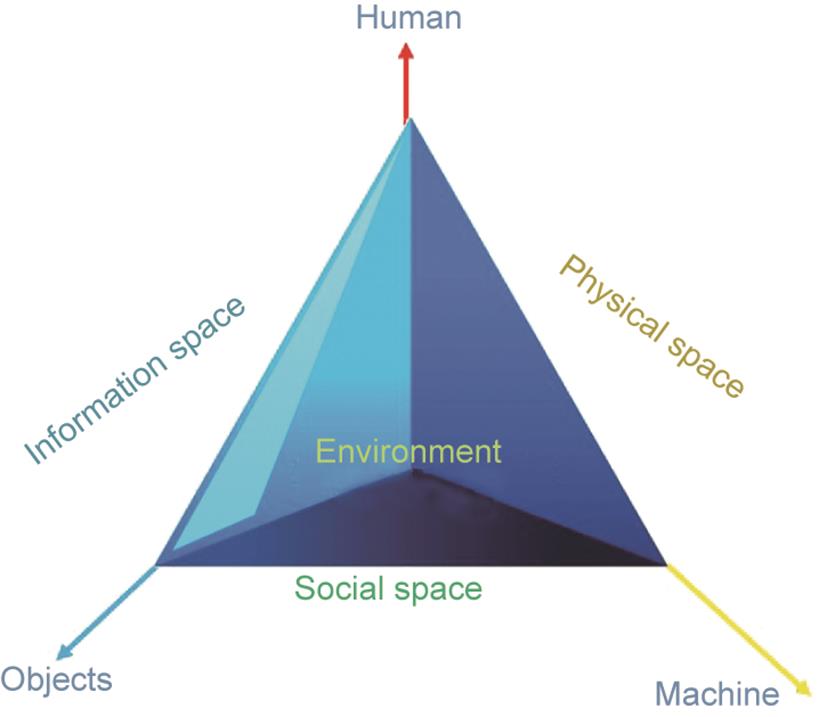
图3

图4
参考文献
[ 1 ] The global grand challenge summit report: global grand challenges [Internet].Stevenage: The Institution of Engineering and Technology; c2021 [cited 2021 Feb 17]. Available from: https://www.raeng.org.uk/publications/other/ggcsreport. 链接1
[ 2 ] Mote CD, Dowling DA, Zhou J. The power of an idea: the international impacts of the grand challenges for engineering. Engineering 2016;2(1):4‒7. 链接1
[ 3 ] Vinuesa R, Azizpour H, Leite I, Balaam M, Dignum V, Domisch S, et al. The role of artificial intelligence in achieving the sustainable development goals. Nat Commun 2020;11(1):233. 链接1
[ 4 ] Fan J, Fang L, Wu J, Guo Y, Dai Q. From brain science to artificial intelligence. Engineering 2020;6(3):248‒52. 链接1
[ 5 ] Rodríguez S, de Paz Y, Bajo J, Corchado JM. Social-based planning model for multiagent systems. Expert Syst Appl 2011;38(10):13005‒23. 链接1
[ 6 ] Liew CF, Yairi T. Companion unmanned aerial vehicles: a survey. 2020. arXiv:2001.04637. 链接1
[ 7 ] Kim HY, Kim B, Kim J. The naughty drone: a qualitative research on drone as companion device. In: Proceedings of the 10th International Conference on Ubiquitous Information Management and Communication; 2016 Jan 4‒6; Danang, VietNam. New York: ACM; 2016. p. 1‒6. 链接1
[ 8 ] Digital economy report. Value creation and capture: implications for developing countries [Internet]. Geneva: United Nations; c2021 [cited 2021 Feb 17]. Available from: https://unctad.org/webflyer/digital-economy-report-2019. 链接1
[ 9 ] Birk A, Antonelli G, Caiti A, Casalino G, Indiveri G, Pascoal A, et al. The CO3AUVs (cooperative cognitive control for autonomous underwater vehicles) project: overview and current progresses. In: Proceedings of OCEANS 2011 IEEE; 2011 Jun 6‒9; Santander, Spain. New York: IEEE; 2011.p. 1‒10. 链接1
[10] Chibani A, Amirat Y, Mohammed S, Matson E, Hagita N, Barreto M. Ubiquitous robotics: recent challenges and future trends. Robot Auton Syst 2013;61(11):1162‒72. 链接1
[11] Yang GZ, Quek TB, Stramigioli S, Ding H, Sun D, Yuh J. Forging global cooperation and collaboration. Sci Robot 2020;5(38):eaba5894. 链接1
[12] Ramos C, Augusto JC, Shapiro D. Ambient intelligence—the next step for artificial intelligence. IEEE Intell Syst 2008;23(2):15‒8. 链接1
[13] Chung SJ, Paranjape AA, Dames P, Shen S, Kumar V. A survey on aerial swarm robotics. IEEE Trans Robot 2018;34(4):837‒55. 链接1
[14] Kolling A, Walker P, Chakraborty N, Sycara K, Lewis M. Human interaction with robot swarms: a survey. IEEE Trans Human-Mach Syst 2016;46(1):9‒26. 链接1
[15] Zhou J, Zhou Y, Wang B, Zang J. Human‒cyber‒physical systems (HCPSs) in the context of new-generation intelligent manufacturing. Engineering 2019;5(4):624‒36. 链接1
[16] Jennings NR, Moreau L, Nicholson D, Ramchurn S, Roberts S, Rodden T, et al. Human-agent collectives. Commun ACM 2014;57(12):80‒8. 链接1
[17] DeLaurentis D. Role of humans in complexity of a system-of-systems. In:Proceedings of the 1st International Conference on Digital Human Modeling; 2007 Jul 22‒27; Beijing, China. Berlin: Springer-Verlag; 2007. p. 363‒71. 链接1
[18] Kiumarsi B, Basar T. Human-in-the-loop control of distributed multi-agentsystems: a relative input‒output approach. In: Proceedings of 2018 IEEE Conference on Decision and Control (CDC); 2018 Dec 17‒19; Miami, FL, USA. New York: IEEE; 2018. p. 3343‒8. 链接1
[19] Emmanouilidis C, Pistofidis P, Bertoncelj L, Katsouros V, Fournaris A, Koulamas C, et al. Enabling the human in the loop: Linked data and knowledge in industrial cyber‒physical systems. Annu Rev Contr 2019;47:249‒65. 链接1
[20] Aksanli B, Rosing TS. Human behavior aware energy management in residential cyber‒physical systems. IEEE Trans Emerg Top Comput 2020;8(1):45‒57. 链接1
[21] Conti M, Passarella A, Das SK. The internet of people (IoP): a new wave in pervasive mobile computing. Pervasive Mobile Comput 2017;41:1‒27. 链接1
[22] Zeng J, Yang LT, Lin M, Ning H, Ma J. A survey: cyber‒physical‒social systems and their system-level design methodology. Future Gener Comput Syst 2020;105:1028‒42. 链接1
[23] Wang FY, Zhang JJ, Wang X. Parallel intelligence: toward lifelong and eternal developmental AI and learning in cyber‒physical‒social spaces. Front Comput Sci 2018;12(3):401‒5. 链接1
[24] Wang FY, Yuan Y, Zhang J, Qin R, Smith MH. Blockchainized internet of minds:a new opportunity for cyber‒physical‒social systems. IEEE Trans Comput SocSyst 2018;5(4):897‒906. 链接1
[25] Hammons R, Myers J. Architects of our future: redefining smart cities to be people-centric and socially responsible. IEEE Internet Things M 2019;2(2):10‒4. 链接1
[26] Ursino D, Virgili L. Humanizing IoT: defining the profile and the reliability of a thing in a multi-IoT scenario. In: Toward Social Internet of Things (SIoT):enabling technologies, architectures and applications. Springer; 2020. p. 51‒76. 链接1
[27] Roopa MS, Pattar S, Buyya R, Venugopal KR, Iyengar SS, Patnaik LM. Social Internet of Things (SIoT): foundations, thrust areas, systematic review and future directions. Comput Commun 2019;139:32‒57. 链接1
[28] Mahieu C, Ongenae F, de Backere F, Bonte P, de Turck F, Simoens P. Semanticsbased platform for context-aware and personalized robot interaction in the internet of robotic things. J Syst Softw 2019;149:138‒57. 链接1
[29] Vermesan O, Bröring A, Tragos E, Serrano M, Bacciu D, Chessa S, et al. Internet of robotic thing—converging sensing/actuating, hyperconnectivity, artificial intelligence and IoT platforms. In: Cognitive hyperconnected digital transformation—Internet of Things intelligence evolution. River Publishers; 2017. p. 97‒155. 链接1
[30] Pfeifer R, Lungarella M, Iida F. Self-organization, embodiment, and biologically inspired robotics. Science 2007;318(5853):1088‒93. 链接1
[31] Brambilla M, Ferrante E, Birattari M, Dorigo M. Swarm robotics: a review from the swarm engineering perspective. Swarm Intell 2013;7(1):1‒41. 链接1
[32] Li S, Batra R, Brown D, Chang HD, Ranganathan N, Hoberman C, et al. Particle robotics based on statistical mechanics of loosely coupled components. Nature 2019;567(7748):361‒5. 链接1
[33] Slavkov I, Carrillo-Zapata D, Carranza N, Diego X, Jansson F, Kaandorp J, et al. Morphogenesis in robot swarms. Sci Robot 2018;3(25):aau9178. 链接1
[34] Rubenstein M, Cornejo A, Nagpal R. Programmable self-assembly in a thousand-robot swarm. Science 2014;345(6198):795‒9. 链接1
[35] Berdahl A, Torney CJ, Ioannou CC, Faria JJ, Couzin ID. Emergent sensing of complex environments by mobile animal groups. Science 2013;339(6119):574‒6. 链接1
[36] Sasaki T, Biro D. Cumulative culture can emerge from collective intelligence in animal groups. Nat Commun 2017;8(1):15049. 链接1
[37] Conradt L. When it pays to share decisions. Nature 2011;471(7336):40‒1. 链接1
[38] Couzin ID, Krause J, Franks NR, Levin SA. Effective leadership and decisionmaking in animal groups on the move. Nature 2005;433(7025):513‒6. 链接1
[39] Zafeiris A, Vicsek T. Group performance is maximized by hierarchical competence distribution. Nat Commun 2013;4(1):2484. 链接1
[40] Anderson TL, Donath M. Animal behavior as a paradigm for developing robot autonomy. Robot Auton Syst 1990;6(1‒2):145‒68.
[41] Sahin E. Swarm robotics: from sources of inspiration to domains of application. In: Proceedings of the 2004 International Conference on Swarm Robotics; 2004 Jul 17; Santa Monica, CA, USA. Berlin: Springer-Verlag; 2004.p. 10‒20. 链接1
[42] Hassabis D, Kumaran D, Summerfield C, Botvinick M. Neuroscience-inspired artificial intelligence. Neuron 2017;95(2):245‒58. 链接1
[43] Tenenbaum JB, Kemp C, Griffiths TL, Goodman ND. How to grow a mind: statistics, structure, and abstraction. Science 2011;331(6022):1279‒85. 链接1
[44] Savage N. The search for secrets of the human brain. Nature 2019;574(7778):S49‒51. 链接1
[45] Fan J, Suo J, Wu J, Xie H, Shen Y, Chen F, et al. Video-rate imaging of biological dynamics at centimetre scale and micrometre resolution. Nat Photonics2019;13(11):809‒16. 链接1
[46] Knight JC, Nowotny T. Larger GPU-accelerated brain simulations with procedural connectivity. Nat Comput Sci 2021;1:136‒42. 链接1
[47] Lake BM, Ullman TD, Tenenbaum JB, Gershman SJ. Building machines that learn and think like people. Behav Brain Sci 2017;40:e253. 链接1
[48] Mishra A, Son J. Cognitive robotics: a platform for innovation. IEEE Potentials 2019;38(3):39‒42. 链接1
[49] Banino A, Barry C, Uria B, Blundell C, Lillicrap T, Mirowski P, et al. Vectorbased navigation using grid-like representations in artificial agents. Nature 2018;557(7705):429‒33. 链接1
[50] Thill S, Caligiore D, Borghi AM, Ziemke T, Baldassarre G. Theories and computational models of affordance and mirror systems: an integrative review. Neurosci Biobehav Rev 2013;37(3):491‒521. 链接1
[51] Ralph MAL, Jefferies E, Patterson K, Rogers TT. The neural and computational bases of semantic cognition. Nat Rev Neurosci 2017;18(1):42‒55. 链接1
[52] Merel J, Botvinick M, Wayne G. Hierarchical motor control in mammals and machines. Nat Commun 2019;10(1):5489. 链接1
[53] Báez-Mendoza R, Mastrobattista EP, Wang AJ, Williams ZM. Social agent identity cells in the prefrontal cortex of interacting groups of primates. Science 2021;374(6566):eabb4149. 链接1
[54] Saxe A, Nelli S, Summerfield C. If deep learning is the answer, what is the question? Nat Rev Neurosci 2021;22(1):55‒67. 链接1
[55] Ghahramani Z. Probabilistic machine learning and artificial intelligence. Nature 2015;521(7553):452‒9. 链接1
[56] Kriegeskorte N. Deep neural networks: a new framework for modeling biological vision and brain information processing. Annu Rev Vis Sci 2015;1(1):417‒46. 链接1
[57] Volodymyr M, Koray K, David S, Andrei AR, Joel V, Marc GB. Human-level control through deep reinforcement learning. Nature 2015;518(7540):529‒33. 链接1
[58] Schmidt M, Lipson H. Distilling free-form natural laws from experimental data. Science 2009;324(5923):81‒5. 链接1
[59] Udrescu SM, Tegmark M. AI Feynman: a physics-inspired method for symbolic regression. Sci Adv 2020;6(16):eaay2631. 链接1
[60] Davies A, Veličković P, Buesing L, Blackwell S, Zheng D, Tomašev N, et al. Advancing mathematics by guiding human intuition with AI. Nature 2021;600(7887):70‒4. 链接1
[61] Peterson JC, Bourgin DD, Agrawal M, Reichman D, Griffiths TL. Using largescale experiments and machine learning to discover theories of human decision-making. Science 2021;372(6547):1209‒14. 链接1
[62] Wu S, Kondo Y, Kakimoto M, Yang B, Yamada H, Kuwajima I, et al. Machinelearning-assisted discovery of polymers with high thermal conductivity using a molecular design algorithm. NPJ Comput Mater 2019;5:66. 链接1
[63] Isayev O. Text mining facilitates materials discovery. Nature 2019;571(7763):42‒3. 链接1
[64] Zhu Y, Gao T, Fan L, Huang S, Edmonds M, Liu H, et al. Dark, beyond deep: a paradigm shift to cognitive AI with humanlike common sense. Engineering 2020;6(3):310‒45. 链接1
[65] Asada M, Hosoda K, Kuniyoshi Y, Ishiguro H, Inui T, Yoshikawa Y, et al. Cognitive developmental robotics: a survey. IEEE Trans Auton Ment Dev 2009;1(1):12‒34. 链接1
[66] Min H, Yi C, Luo R, Zhu J, Bi S. Affordance research in developmental robotics:a survey. IEEE Trans Cogn Dev Syst 2016;8(4):237‒55. 链接1
[67] Prince CG, Gogate LJ. Epigenetic robotics: behavioral treatments and potential new models for developmental pediatrics. Pediatr Res 2007;61(4):383‒5. 链接1
[68] Shanechi MM. Brain-machine interfaces from motor to mood. Nat Neurosci 2019;22(10):1554‒64. 链接1
[69] Wuchty S, Jones BF, Uzzi B. The increasing dominance of teams in production of knowledge. Science 2007;316(5827):1036‒9. 链接1
[70] Navajas J, Niella T, Garbulsky G, Bahrami B, Sigman M. Aggregated knowledge from a small number of debates outperforms the wisdom of large crowds. Nat Hum Behav 2018;2(2):126‒32. 链接1
[71] Parkinson C, Kleinbaum AM, Wheatley T. Similar neural responses predict friendship. Nat Commun 2018;9(1):332. 链接1
[72] Christakis NA, Fowler JH. Social network sensors for early detection of contagious outbreaks. PLoS ONE 2010;5(9):e12948. 链接1
[73] Hufnagel L, Brockmann D, Geisel T. Forecast and control of epidemics in a globalized world. Proc Natl Acad Sci USA 2004;101(42):15124‒9. 链接1
[74] Mumford MD, Higgs CA, editors. Leader thinking skills: capacities for contemporary leadership. New York: Taylor & Francis; 2020. 链接1
[75] Marlowe HA. Social intelligence: evidence for multidimensionality and construct independence. J Educ Psychol 1986;78(1):52‒8. 链接1
[76] Freeman J, Baggio JA, Coyle TR. Social and general intelligence improves collective action in a common pool resource system. Proc Natl Acad Sci USA 2020;117(14):7712‒8. 链接1
[77] Mao W, Gratch J. Social judgment in multiagent interactions. In: Proceedings of the Third International Joint Conference on Autonomous Agents and Multiagent Systems; 2004 Jul 23; New York, NY, USA. New York: IEEE; 2004.p. 210‒7. 链接1
[78] Pinyol I, Sabater-Mir J. Computational trust and reputation models for open multi-agent systems: a review. Artif Intell Rev 2013;40(1):1‒25. 链接1
[79] Wu Q, Ding G, Xu Y, Feng S, Du Z, Wang J, et al. Cognitive internet of things: a new paradigm beyond connection. IEEE Internet Things J 2014;1(2):129‒43. 链接1
[80] Ding G, Wu Q, Zhang L, Lin Y, Tsiftsis TA, Yao YD. An amateur drone surveillance system based on the cognitive Internet of Things. IEEE Commun Mag 2018;56(1):29‒35. 链接1
[81] Calderon MA, Delgadillo SE, Garcia-Macias JA. A more human-centric Internet of Things with temporal and spatial context. Procedia Comput Sci 2016;83:553‒9. 链接1
[82] Rios-Martinez J, Spalanzani A, Laugier C. From proxemics theory to sociallyaware navigation: a survey. Int J Soc Robot 2015;7(2):137‒53. 链接1
[83] Parent C, Spaccapietra S, Renso C, Andrienko G, Andrienko N, Bogorny V, et al. Semantic trajectories modeling and analysis. ACM Comput Surv 2013;45(4):1‒32. 链接1
[84] Vasudevan S, Gächter S, Nguyen V, Siegwart R. Cognitive maps for mobile robots—an object based approach. Robot Auton Syst 2007;55(5):359‒71. 链接1
[85] Dignum F, Hofstede GJ, Prada R. From autistic to social agents. In: Proceedings of 13th International Conference on Autonomous Agents and Multiagent Systems (AAMAS); 2014 May 5‒9; Paris, France. IFAAMAS; 2014. p. 1161‒4.
[86] Sun L, Zhan W, Tomizuka M, Dragan AD. Courteous autonomous cars. In:Proceedings of 2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS); 2018 Oct 1‒5; Madrid, Spain. New York: IEEE; 2018. p.663‒70. 链接1
[87] Sun L, Zhan W, Chan CY, Tomizuka M. Behavior planning of autonomous cars with social perception. In: Proceedings of 2019 IEEEIntelligent Vehicles Symposium IV); 2019 Jun 9‒12; Paris, France. New York: IEEE; 2019. p. 207‒13. 链接1
[88] Kaminka GA. Curing robot autism: a challenge. In: Proceedings of the 2013 International Conference on Autonomous Agents and Multi-agent Systems; 2013 May 6‒10; St Paul, MN, USA. AAMS; 2013. p. 801‒4.
[89] Schwarting W, Pierson A, Alonso-Mora J, Karaman S, Rus D. Social behavior for autonomous vehicles. Proc Natl Acad Sci USA 2019;116(50):24972‒8. 链接1
[90] Sun L, Zhan W, Hu Y, Tomizuka M. Interpretable modelling of driving behaviors in interactive driving scenarios based on cumulative prospect theory. In: Proceedings of 2019 IEEE Intelligent Transportation Systems Conference (ITSC); 2019 Oct 27‒30; Auckland, New Zealand. New York: IEEE;2019. p. 4329‒35. 链接1
[91] Sanjab A, Saad W, Basar T. A game of drones: cyber‒physical security of timecritical UAV applications with cumulative prospect theory perceptions and valuations. IEEE Trans Commun 2020;68(11):6990‒7006. 链接1
[92] Sabater J, Sierra C. Reputation and social network analysis in multi-agent systems. In: Proceedings of the First International Joint Conference on Autonomous Agents and Multiagent Systems; 2002 Jul 15‒19; Bologna, Italy. New York: ACM; 2002. p. 457‒82. 链接1
[93] Gordon G. Social behaviour as an emergent property of embodied curiosity: a robotics perspective. Philos Trans R Soc Lond B Biol Sci 2019;374(1771):20180029. 链接1
[94] Santos FC, Santos MD, Pacheco JM. Social diversity promotes the emergence of cooperation in public goods games. Nature 2008;454(7201):213‒6. 链接1
[95] Ferreira JF, Dias J. Attentional mechanisms for socially interactive robots—a survey. IEEE Trans Auton Ment Dev 2014;6(2):110‒25. 链接1
[96] Shu T, Ryoo MS, Zhu SC. Learning social affordance for human‒robot interaction. 2016. arXiv:1604.03692. 链接1
[97] Yang GZ. Robot learning—beyond imitation. Sci Robot 2019;4(26):eaaw3520. 链接1
[98] Senft E, Lemaignan S, Baxter PE, Bartlett M, Belpaeme T. Teaching robots social autonomy from in situ human guidance. Sci Robot 2019;4(35):eaat1186. 链接1
[99] Clabaugh C, Mataric´ M. Robots for the people, by the people: personalizing human‒machine interaction. Sci Robot 2018;3(21):eaat7451. 链接1
[100] Valenzuela-Valdes JF, Lopez MA, Padilla P, Padilla JL, Minguillon J. Human neuro‒activity for securing body area networks: application of brain‒computer interfaces to people-centric Internet of Things. IEEE Commun Mag 2017;55(2):62‒7. 链接1
[101] Dominijanni G, Shokur S, Salvietti G, Buehler S, Palmerini E, Rossi S, et al. The neural resource allocation problem when enhancing human bodies with extra robotic limbs. Nat Mach Intell 2021;3(10):850‒60. 链接1
[102] Wang T, Wang M, Yang L, Li Z, Loh XJ, Chen X. Cyber‒physiochemical interfaces. Adv Mater 2020;32(8):e1905522. 链接1
[103] Vanderelst D, Winfield A. An architecture for ethical robots. 2016. arXiv:1609.02931.
[104] Sitti M. Microscale and nanoscale robotics systems [grand challenges of robotics]. IEEE Robot Autom Mag 2007;14(1):53‒60. 链接1
[105] Estrada MA, Mintchev S, Christensen DL, Cutkosky MR, Floreano D. Forceful manipulation with micro air vehicles. Sci Robot 2018;3(23):eaau6903. 链接1
[106] Seo J, Paik J, Yim M. Modular reconfigurable robotics. Annu Rev Control Robot Auton Syst 2019;2(1):63‒88. 链接1
[107] Li J, de Ávila BE, Gao W, Zhang L, Wang J. Micro/nanorobots for biomedicine:delivery, surgery, sensing, and detoxification. Sci Robot 2017;2(4):2. 链接1
[108] Peplow M. The tiniest Lego: a tale of nanoscale motors, rotors, switches and pumps. Nature 2015;525:18‒21. 链接1
[109] Zhang L, Marcos V, Leigh DA. Molecular machines with bio-inspired mechanisms. Proc Natl Acad Sci USA 2018;115(38):9397‒404. 链接1
[110] Floreano D, Wood RJ. Science, technology and the future of small autonomous drones. Nature 2015;521(7553):460‒6. 链接1
[111] Ma KY, Chirarattananon P, Fuller SB, Wood RJ. Controlled flight of a biologically inspired, insect-scale robot. Science 2013;340(6132):603‒7. 链接1
[112] Jafferis NT, Helbling EF, Karpelson M, Wood RJ. Untethered flight of an insectsized flapping-wing microscale aerial vehicle. Nature 2019;570(7762):491‒5. 链接1
[113] Rus D, Tolley MT. Design, fabrication and control of soft robots. Nature 2015;521(7553):467‒75. 链接1
[114] Laschi C, Mazzolai B, Cianchetti M. Soft robotics: technologies and systems pushing the boundaries of robot abilities. Sci Robot 2016;1(1):eaah3690. 链接1
[115] Howard D, Eiben AE, Kennedy DF, Mouret JB, Valencia P, Winkler D. Evolving embodied intelligence from materials to machines. Nat Mach Intell 2019;1(1):12‒9. 链接1
[116] Kaspar C, Ravoo BJ, van der Wiel WG, Wegner SV, Pernice WHP. The rise of intelligent matter. Nature 2021;594(7863):345‒55. 链接1
[117] de Marco C, Pané S, Nelson BJ. 4D printing and robotics. Sci Robot 2018;3(18):eaau0449. 链接1
[118] Sakar MS. Immune evasion by designer microrobots. Sci Robot 2020;5(43):eabc7620. 链接1
[119] Barnhart DJ, Vladimirova T, Sweeting MN. Very-small-satellite design for distributed space missions. J Spacecr Rockets 2007;44(6):1294‒306. 链接1
[120] Norton JC, Slawinski PR, Lay HS, Martin JW, Cox BF, Cummins G, et al. Intelligent magnetic manipulation for gastrointestinal ultrasound. Sci Robot 2019;4(31):aav7725. 链接1
[121] Donald BR, Levey CG, McGray CD, Paprotny I, Rus D. An untethered, electrostatic, globally controllable MEMS micro-robot. J Microelectromech Syst 2006;15(1):1‒15. 链接1
[122] Li G, Chen X, Zhou F, Liang Y, Xiao Y, Cao X, et al. Self-powered soft robot in the Mariana Trench. Nature 2021;591(7848):66‒71. 链接1
[123] Bandyopadhyay S, Foust R, Subramanian GP, Chung SJ, Hadaegh FY. Review of formation flying and constellation missions using nanosatellites. J Spacecr Rockets 2016;53(3):567‒78. 链接1
[124] Chen Y, Doshi N, Goldberg B, Wang H, Wood RJ. Controllable water surface to underwater transition through electrowetting in a hybrid terrestrial‒aquatic microrobot. Nat Commun 2018;9(1):2495. 链接1
[125] Chen AI, Balter ML, Maguire TJ, Yarmush ML. Deep learning robotic guidance for autonomous vascular access. Nat Mach Intell 2020;2(2): 104‒15. 链接1
[126] Fukuda T, Dario P, Yang GZ. Humanoid robotics—history, current state of the art, and challenges. Sci Robot 2017;2(13):eaar4043. 链接1
[127] Piazza C, Grioli G, Catalano MG, Bicchi A. Annual review of control, robotics, and autonomous systems. Annu Rev 2019;2(1):1‒32. 链接1
[128] The rise of ocean robots. Nat Geosci 2020;13(6):393. 链接1
[129] Gupta SG, Ghonge M, Jawandhiya PM. Review of unmanned aircraft system (UAS). Int J Adv Res Comput Eng Technol 2013;2(4):1646‒58.
[130] Gao Y, Chien S. Review on space robotics: toward top-level science through space exploration. Sci Robot 2017;2(7):2. 链接1
[131] Hawkes E, An B, Benbernou NM, Tanaka H, Kim S, Demaine ED, et al. Programmable matter by folding. Proc Natl Acad Sci USA 2010;107(28):12441‒5. 链接1
[132] Felton S, Tolley M, Demaine E, Rus D, Wood R. A method for building selffolding machines. Science 2014;345(6197):644‒6. 链接1
[133] Hu W, Lum GZ, Mastrangeli M, Sitti M. Small-scale soft-bodied robot with multimodal locomotion. Nature 2018;554(7690):81‒5. 链接1
[134] Cianchetti M, Laschi C, Menciassi A, Dario P. Biomedical applications of soft robotics. Nat Rev Mater 2018;3(6):143‒53. 链接1
[135] Yu X, Zhang Y. Sense and avoid technologies with applications to unmanned aircraft systems: review and prospects. Prog Aerosp Sci 2015;74:152‒66. 链接1
[136] Campbell S, Naeem W, Irwin GW. A review on improving the autonomy of unmanned surface vehicles through intelligent collision avoidance manoeuvres. Annu Rev Contr 2012;36(2):267‒83. 链接1
[137] Engelhardtsen Ø. 3D AUV collision avoidance [dissertation]. Trondheim:Norwegian University of Science and Technology; 2007.
[138] Guanetti J, Kim Y, Borrelli F. Control of connected and automated vehicles: state of the art and future challenges. Annu Rev Contr 2018;45:18‒40. 链接1
[139] Funke J, Brown M, Erlien SM, Gerdes JC. Collision avoidance and stabilization for autonomous vehicles in emergency scenarios. IEEE Trans Control Syst Technol 2017;25(4):1204‒16. 链接1
[140] Bonnal C, McKnight D, Phipps C, Dupont C, Missonnier S, Lequette L, et al. Just in time collision avoidance—a review. Acta Astronaut 2020;170:637‒51. 链接1
[141] Dahl J, de Campos GR, Olsson C, Fredriksson J. Collision avoidance: a literature review on threat-assessment techniques. IEEE Trans Intell Veh 2019;4(1):101‒13. 链接1
[142] Haddadin S, de Luca A, Albu-Schäffer A. Robot collisions: a survey on detection, isolation, and identification. IEEE Trans Robot 2017;33(6):1292‒312. 链接1
[143] Hoy M, Matveev AS, Savkin AV. Algorithms for collision-free navigation of mobile robots in complex cluttered environments: a survey. Robotica 2015;33(3):463‒97. 链接1
[144] Chen Y, Moore KL, Song Z. Diffusion boundary determination and zone control via mobile actuator‒sensor networks (MAS-net): challenges and opportunities. In: Proceedings of Intelligent Computing: Theory and Applications II; 2004 Apr 12‒16; Orlando, FL, USA. SPIE; 2004. p. 102. 链接1
[145] Dong X, Hua Y, Zhou Y, Ren Z, Zhong Y. Theory and experiment on formationcontainment control of multiple multirotor unmanned aerial vehicle systems. IEEE Trans Autom Sci Eng 2019;16(1):229‒40. 链接1
[146] Dong X, Yu B, Shi Z, Zhong Y. Time-varying formation control for unmanned aerial vehicles: theories and applications. IEEE Trans Control Syst Technol 2015;23(1):340‒8. 链接1
[147] Siegwart R, Nourbakhsh IR, Scaramuzza D. Introduction to autonomous mobile robots. Cambridge: MIT Press; 2011.
[148] Sun R. Cognitive social simulation incorporating cognitive architectures. IEEE Intell Syst 2007;22(5):33‒9. 链接1
[149] Vernon D. Artificial cognitive systems: a primer. Cambridge: The MIT Press;2014.
[150] Suárez-Ruiz F, Zhou X, Pham QC. Can robots assemble an IKEA chair? Sci Robot 2018;3(17):eaat6385. 链接1
[151] Yang GZ, Bellingham J, Dupont PE, Fischer P, Floridi L, Full R, et al. The grand challenges of Science Robotics. Sci Robot 2018;3(14):eaar7650. 链接1
[152] Goldberg K. Robots and the return to collaborative intelligence. Nat Mach Intell 2019;1(1):2‒4. 链接1
[153] Miriyev A, Kovacˇ M. Skills for physical artificial intelligence. Nat Mach Intell 2020;2(11):658‒60. 链接1
[154] Hanford SD, Janrathitikarn O, Long LN. Control of mobile robots using the soar cognitive architecture. J Aerosp Comput Inf Commun 2009;6(2):69‒91. 链接1
[155] Fettweis GP. The tactile internet: applications and challenges. IEEE Veh Technol Mag 2014;9(1):64‒70. 链接1
[156] Wang H, Zhao H, Zhang J, Ma D, Li J, Wei J. Survey on unmanned aerial vehicle networks: a cyber physical system perspective. IEEE Comm Surv and Tutor 2020;22(2):1027‒70. 链接1
[157] Ning Z, Huang J, Wang X. Vehicular fog computing: enabling real-time traffic management for smart cities. IEEE Wirel Commun 2019;26(1):87‒93. 链接1
[158] Bekmezci I, Sahingoz OK, Temel S_. Flying ad-hoc networks (FANETs): a survey. Ad Hoc Netw 2013;11(3):1254‒70. 链接1
[159] Mozaffari M, Saad W, Bennis M, Nam YH, Debbah M. A tutorial on UAVs for wireless networks: applications, challenges, and open problems. IEEE Comm Surv and Tutor 2019;21(3):2334‒60. 链接1
[160] Maurelli F, Saigol Z, Insaurralde CC, Petillot YR, Lane DM. Marine world representation and acoustic communication: challenges for multi-robot collaboration. In: Proceedings of 2012 IEEE/OES Autonomous Underwater Vehicles (AUV); 2012 Sep 24‒27; Southampton, UK. New York: 2012. p. 1‒6. 链接1
[161] Rovatsos M. Computational interaction frames [dissertation]. Munich:Technical University Munich; 2004. German.
[162] Mohr DC, Shilton K, Hotopf M. Digital phenotyping, behavioral sensing, or personal sensing: names and transparency in the digital age. NPJ Digit Med 2020;3(1):45. 链接1
[163] Shmueli E, Singh VK, Lepri B, SensingPentland A., understanding, and shaping social behavior. IEEE Trans Comput Soc Syst 2014;1(1):22‒34. 链接1
[164] Roggen D, Tröster G, Lukowicz P, Ferscha A, Millán JR, Chavarriaga R. Opportunistic human activity and context recognition. Computer 2013;46:36‒45. 链接1
[165] Dang S, Amin O, Shihada B, Alouini MS. What should 6G be? Nat Electron 2020;3(1):20‒9. 链接1
[166] Rabaey JM. The human intranet—where swarms and humans meet. In:Proceedings of 2015 Design, Automation & Test in Europe Conference & Exhibition (DATE); 2015 Mar 9‒13; Grenoble, France. New York: IEEE; 2015. p. 637‒40. 链接1
[167] Xu K, Hui P, Li VOK, Crowcroft J, Latora V, Lio P. Impact of altruism on opportunistic communications. In: Proceedings of 2009 First International Conference on Ubiquitous and Future Networks; 2009 Jun 7‒9; Hong Kong, China. New York: IEEE; 2009. p. 153‒8. 链接1
[168] Whitbeck J, Lopez Y, Leguay J, Conan V, de Amorim MD. Push-and-track:saving infrastructure bandwidth through opportunistic forwarding. Pervasive Mobile Comput 2012;8(5):682‒97. 链接1
[169] Zheng X, Chen W, Wang P, Shen D, Chen S, Wang X, et al. Big data for social transportation. IEEE Trans Intell Transp Syst 2015;17(3):620‒30. 链接1
[170] Lu Y, Asghar MR. Semantic communications between distributed cyber‒physical systems towards collaborative automation for smart manufacturing. J Manuf Syst 2020;55:348‒59. 链接1
[171] Piyathilaka L, Kodagoda S. Affordance-map: a map for context-aware path planning. In: Proceedings of Australasian Conference on Robotics and Automation (ACRA); 2014 Dec 2‒4; Melbourne, Australia; 2014. 链接1
[172] Varadarajan KM, Vincze M. Afrob: the affordance network ontology for robots. In: Proceedings of 2012 IEEE/RSJ International Conference on Intelligent Robots and Systems; 2012 Oct 7‒12; Vilamoura-Algarve, Portugal. New York: IEEE; 2012. p. 1343‒50. 链接1
[173] Phan N, Dou D, Wang H, Kil D, Piniewski B. Ontology-based deep learning for human behavior prediction with explanations in health social networks. Inf Sci 2017;384:298‒313. 链接1
[174] Alsafi Y, Vyatkin V. Ontology-based reconfiguration agent for intelligent mechatronic systems in flexible manufacturing. Robot Comput-Integr Manuf 2010;26(4):381‒91. 链接1
[175] Paull L, Severac G, Raffo GV, Angel JM, Boley H, Durst PJ, et al. Towards an ontology for autonomous robots. In: Proceedings of 2012 IEEE/RSJ International Conference on Intelligent Robots and Systems; 2012 Oct 7‒12; Vilamoura-Algarve, Portugal. New York: IEEE; 2012. p. 1359‒64. 链接1
[176] Tchuiev V, Indelman V. Distributed consistent multi-robot semantic localization and mapping. IEEE Robot Autom Lett 2020;5(3):4649‒56. 链接1
[177] Schou C, Madsen O. A plug and produce framework for industrial collaborative robots. Int J Adv Robot Syst 2017;14(4):1‒10. 链接1
[178] Sanz PJ, Ridao P, Oliver G, Melchiorri C, Casalino G, Silvestre C, et al. TRIDENT:a framework for autonomous underwater intervention missions with dexterous manipulation capabilities. IFAC Proc 2010;43(16):187‒92. 链接1
[179] Vernon D, Metta G, Sandini G. A survey of artificial cognitive systems:implications for the autonomous development of mental capabilities in computational agents. IEEE Trans Evol Computat 2007;11(2):151‒80. 链接1
[180] Hsu J. Machines on mission possible. Nat Mach Intell 2019;1(3):124‒7. 链接1
[181] Service RF. Minds of their own. Science 2014;346(6206):182‒3. 链接1
[182] Whaiduzzaman M, Sookhak M, Gani A, Buyya R. A survey on vehicular cloud computing. J Netw Comput Appl 2014;40:325‒44. 链接1
[183] Kehoe B, Patil S, Abbeel P, Goldberg K. A survey of research on cloud robotics and automation. IEEE Trans Autom Sci Eng 2015;12(2):398‒409. 链接1
[184] Garcia Lopez P, Montresor A, Epema D, Datta A, Higashino T, Iamnitchi A, et al. Edge-centric computing: vision and challenges. ACM SIGCOMM Computer Commun Rev 2015;45(5):37‒42. 链接1
[185] Shaik MS, Struhár V, Bakhshi Z, Dao VL, Desai N, Papadopoulos AV, et al. Enabling fog-based industrial robotics systems. In: Proceedings of 2020 25th IEEE International Conference on Emerging Technologies and Factory Automation (ETFA); 2020 Sep 8‒11; Vienna, Austria. New York: IEEE; 2020. p. 61‒8. 链接1
[186] Tanwani AK, Mor N, Kubiatowicz J, Gonzalez JE, Goldberg K. A fog robotics approach to deep robot learning: application to object recognition and grasp planning in surface decluttering. In: Proceedings of 2019 International Conference on Robotics and Automation (ICRA); 2019 May 20‒24; Montreal, QC, Canada. New York: IEEE; 2019. p. 4559‒66. 链接1
[187] Botta A, Gallo L, Ventre G. Cloud, fog, and dew robotics: architectures for next generation applications. In: Proceedings of 2019 7th IEEE International Conference on Mobile Cloud Computing, Services, and Engineering(MobileCloud); 2019 Apr 4‒9; Newark, CA, USA. New York: IEEE; 2019. p.16‒23. 链接1
[188] Hou X, Li Y, Chen M, Wu D, Jin D, Chen S. Vehicular fog computing: a viewpoint of vehicles as the infrastructures. IEEE Trans Vehicular Technol 2016;65(6):3860‒73. 链接1
[189] Zhou F, Chai Y. Near-sensor and in-sensor computing. Nat Electron 2020;3(11):664‒71. 链接1
[190] Sebastian A, Gallo ML, Khaddam-Aljameh R, Eleftheriou E. Memory devices and applications for in-memory computing. Nat Nanotechnol 2020;15(7):529‒44. 链接1
[191] Yang Y. Multi-tier computing networks for intelligent IoT. Nat Electron 2019;2(1):4‒5. 链接1
[192] Reader SM, Laland KN. Social intelligence, innovation, and enhanced brain size in primates. Proc Natl Acad Sci USA 2002;99(7):4436‒41. 链接1
[193] Tenorth M, Klank U, Pangercic D, Beetz M. Web-enabled robots. IEEE Robot Autom Mag 2011;18(2):58‒68. 链接1
[194] Wei R, Zhang Q, Xu Z. Peers’ experience learning for developmental robots. Int J Soc Robot 2020;12(1):35‒45. 链接1
[195] Gorman BL, Resseguie DR, Tomkins-Tinch C. Sensorpedia: information sharing across incompatible sensor systems. In: Proceedings of 2009 International Symposium on Collaborative Technologies and Systems; 2009 May 18‒22; Baltimore, MD, USA. New York: IEEE; 2009. p. 448‒54. 链接1
[196] Saxena A, Jain A, Sener O, Jami A, Misra DK, Koppula HS. Robobrain: largescale knowledge engine for robots. 2014. arXiv:1412.0691.
[197] Pérez-D0Arpino C, Shah JA. C-LEARN: learning geometric constraints from demonstrations for multi-step manipulation in shared autonomy. In:Proceedings of 2017 IEEE International Conference on Robotics and Automation (ICRA); 2017 May 29‒Jun 3; Singapore. New York: IEEE; 2017.p. 4058‒65. 链接1
[198] Mason W, Watts DJ. Collaborative learning in networks. Proc Natl Acad Sci USA 2012;109(3):764‒9. 链接1
[199] Levine S, Pastor P, Krizhevsky A, Ibarz J, Quillen D. Learning hand‒eye coordination for robotic grasping with deep learning and large-scale data collection. Int J Robot Res 2018;37(4‒5):421‒36.
[200] Zhang D, Guo B, Li B, Yu Z. Extracting social and community intelligence from digital footprints: an emerging research area. In: Yu Z, editor. Ubiquitous intelligence and computing. Heidelberg: Springer; 2010. p. 4‒18. 链接1
[201] Cao K, Chen Y. Fractional order crowd dynamics. Boston: De Gruyter; 2018. 链接1
[202] Song C, Qu Z, Blumm N, Barabási AL. Limits of predictability in human mobility. Science 2010;327(5968):1018‒21. 链接1
[203] Yan XY, Wang WX, Gao ZY, Lai YC. Universal model of individual and population mobility on diverse spatial scales. Nat Commun 2017;8(1):1639. 链接1
[204] Friedkin NE, Bullo F. How truth wins in opinion dynamics along issue sequences. Proc Natl Acad Sci USA 2017;114(43):11380‒5. 链接1
[205] Proskurnikov AV, Tempo R. A tutorial on modeling and analysis of dynamic social networks. Part I. Ann Revs Control 2017;43:65‒79. 链接1
[206] Proskurnikov AV, Tempo R. A tutorial on modeling and analysis of dynamic social networks. Part II. Ann Rev Control 2018;45:166‒90. 链接1
[207] Murphy RR, Dreger KL, Newsome S, Rodocker J, Slaughter B, Smith R, et al. Marine heterogeneous multirobot systems at the great Eastern Japan Tsunami recovery. J Field Robot 2012;29(5):819‒31. 链接1
[208] Saffiotti A, Broxvall M. PEIS ecologies: ambient intelligence meets autonomous robotics. In: Proceedings of the 2005 Joint Conference on Smart Objects and Ambient Intelligence: Innovative Context-Aware Services: Usages and Technologies; 2005 Oct 12‒14; Grenoble, France. New York: ACM; 2005. p. 277‒81. 链接1
[209] Sanfeliu A, Andrade-Cetto J. Ubiquitous networking robotics in urban settings. In: Proceedings of Network Robot System: Toward Intelligent Robotic Systems Integrated with Environments; 2006 Oct 10; Beijing, China 2006.
[210] Wang XV, Wang L, Mohammed A, Givehchi M. Ubiquitous manufacturing system based on cloud: a robotics application. Robot Comput-Integr Manuf 2017;45:116‒25. 链接1
[211] Niu H, Hollenbeck D, Zhao T, Wang D, Chen Y. Evapotranspiration estimation with small UAVs in precision agriculture. Sensors (Basel) 2020;20(22):6427. 链接1
[212] Perera C, Zaslavsky A, Christen P, Georgakopoulos D. Sensing as a service model for smart cities supported by Internet of Things. Trans Emerging Tel Tech 2014;25(1):81‒93. 链接1
[213] Alwateer M, Loke SW, Zuchowicz AM. Drone services: issues in drones for location-based services from human-drone interaction to information processing. J Locat Based Serv 2019;13(2):94‒127. 链接1
[214] Rasmussen S, Kingston D, Humphrey L. A brief introduction to unmanned systems autonomy services (UxAS). In: Proceedings of 2018 International Conference on Unmanned Aircraft Systems (ICUAS); 2018 Jun 12‒15; Dallas, TX, USA. New York: IEEE; 2018. p. 257‒68. 链接1
[215] Zhao S, Yu L, Cheng B, Chen J. IoT service clustering for dynamic service matchmaking. Sensors (Basel) 2017;17(8):e1727. 链接1
[216] Lundh R, Karlsson L, Saffiotti A. Autonomous functional configuration of a network robot system. Robot Auton Syst 2008;56(10):819‒30. 链接1
[217] Goodrich MA, Schultz AC. Human‒robot interaction: a survey. Boston: Now Publishers Inc; 2008. 链接1
[218] Belpaeme T, Kennedy J, Ramachandran A, Scassellati B, Tanaka F. Social robots for education: a review. Sci Robot 2018;3(21):eaat5954. 链接1
[219] Lasota PA, Fong T, Shah JA. A survey of methods for safe human‒robot interaction. FNT Robot 2014;5(3):261‒349.
[220] Traeger ML, Sebo SS, Jung M, Scassellati B, Christakis NA. Vulnerable robots positively shape human conversational dynamics in a human‒robot team. Proc Natl Acad Sci USA 2020;117(12):6370‒5. 链接1
[221] de Melo CM, Marsella S, Gratch J. Human cooperation when acting through autonomous machines. Proc Natl Acad Sci USA 2019;116(9):3482‒7. 链接1
[222] Haring KS, Tobias J, Waligora J, Phillips E, Tenhundfeld NL, Lucas G, et al. Conflict mediation in human‒machine teaming: using a virtual agent to support mission planning and debriefing. In: Proceedings of 2019 28th IEEE International Conference on Robot and Human Interactive Communication (RO-MAN); 2019 Oct 14‒18; New Delhi, India. New York: IEEE; 2019. p. 1‒7. 链接1
[223] Eißfeldt H, Vogelpohl V, Stolz M, Papenfuß A, Biella M, Belz J, et al. The acceptance of civil drones in Germany. CEAS Aeronaut J 2020;11(3):665‒76. 链接1
[224] Beer JM, Prakash A, Mitzner TL, Rogers WA. Understanding robot acceptance. Report. Atlanta: Georgia Institute of Technology; 2011. Report No.: HFA-TR-1103.
[225] Turja T, Oksanen A. Robot acceptance at work: a multilevel analysis based on 27 EU countries. Int J Soc Robot 2019;11(4):679‒89. 链接1
[226] De Graaf MMA. Living with robots investigating the user acceptance of social robots in domestic environments [dissertation]. Enschede: University of Twente; 2015. 链接1
[227] Yuen KF, Chua G, Wang X, Ma F, Li KX. Understanding public acceptance of autonomous vehicles using the theory of planned behaviour. Int J Environ Res Public Health 2020;17(12):E4419. 链接1
[228] Nordhoff S, de Winter J, Kyriakidis M, van Arem B, Happee R. Acceptance of driverless vehicles: results from a large cross-national questionnaire study. J Adv Transp 2018;2018:1‒22. 链接1
[229] Shin HS, Callow M, Dadvar S, Lee YJ, Farkas ZA. User acceptance and willingness to pay for connected vehicle technologies: adaptive choice-based conjoint analysis. Transp Res Rec 2015;2531(1):54‒62. 链接1
[230] Lidynia C, Philipsen R, Ziefle M. Droning on about drones—acceptance of and perceived barriers to drones in civil usage contexts. In: Savage-Knepshield P, Chen J, editors. Advances in human factors in robots and unmanned systems. Springer: Cham; 2017. p. 317‒29. 链接1
[231] Marceddu AC, Sini J, Violante M, Montrucchio B. A novel approach to improve the social acceptance of autonomous driving vehicles by recognizing the emotions of passengers. In: Proceedings of Thirteenth International Conference on Machine Vision; 2020 Nov 2‒6; Rome, Italy. SPIE; 2021. p. 11605.
[232] Bonnefon JF, Shariff A, Rahwan I. The social dilemma of autonomous vehicles. Science 2016;352(6293):1573‒6. 链接1
[233] Gaudiello I, Zibetti E, Lefort S, Chetouani M, Ivaldi S. Trust as indicator of robot functional and social acceptance. An experimental study on user conformation to iCub answers. Comput Human Behav 2016;61:633‒55. 链接1
[234] Glikson E, Woolley AW. Human trust in artificial intelligence: review of empirical research. Acad Management Ann 2020;14(2):627‒60. 链接1
[235] Eyssel F, Kuchenbrandt D. Social categorization of social robots: anthropomorphism as a function of robot group membership. Br J Soc Psychol 2012;51(4):724‒31. 链接1
[236] De Melo C, Carnevale P, Gratch J. Social categorization and cooperation between humans and computers. Proc Annu Meet Congi Sci Soc 2014;36(36):2109‒14.
[237] Walliser JC, de Visser EJ, Wiese E, Shaw TH. Team structure and team building improve human‒machine teaming with autonomous agents. J Cognit Eng Decis Making 2019;13(4):258‒78. 链接1
[238] Poursabzi-Sangdeh F, Goldstein DG, Hofman JM, Vaughan JWW, Wallach H. Manipulating and measuring model interpretability. In: Proceedings of the 2021 CHI Conference on Human Factors in Computing Systems; 2021 May 8‒13; Yokohama, Japan. New York: ACM; 2021. p. 1‒52. 链接1
[239] Li X, Serlin Z, Yang G, Belta C. A formal methods approach to interpretable reinforcement learning for robotic planning. Sci Robot 2019;4(37):eaay6276. 链接1
[240] Narayanan M, Chen E, He J, Kim B, Gershman S, Doshi-Velez F. How do humans understand explanations from machine learning systems? An evaluation of the human-interpretability of explanation. 2018. arXiv:1802.00682.
[241] Hoffman G, Breazeal C. Effects of anticipatory section on human‒robot teamwork efficiency, fluency, and perception of team. In: Proceedings of the ACM/IEEE International Conference on Human‒Robot Interaction; 2007 Mar 10‒12; Arlington, VA, USA. New York: ACM; 2007. p. 1‒8. 链接1
[242] de Visser E, Parasuraman R. Adaptive aiding of human‒robot teaming: effects of imperfect automation on performance, trust, and workload. J Cogn Eng Decis Mak 2011;5(2):209‒31. 链接1
[243] Birnbaum GE, Mizrahi M, Hoffman G, Reis HT, Finkel EJ, Sass O. Machines as a source of consolation: robot responsiveness increases human approach behavior and desire for companionship. In: Proceedings of 2016 11th ACM/IEEE International Conference on Human‒Robot Interaction (HRI); 2016 Mar 7‒10; Christchurch, New Zealand. New York: IEEE; 2016. p. 165‒72. 链接1
[244] Jung MF, Lee JJ, DePalma N, Adalgeirsson SO, Hinds PJ, Breazeal C. Engaging robots: easing complex human‒robot teamwork using backchanneling. In: Proceedings of the 2013 Conference on Computer Supported Cooperative Work; 2013 Feb 23‒27; AntonioSan, TX, USA. New York: ACM; 2013. p. 1555‒66. 链接1
[245] Qian X, Yu J, Dai R. A new discipline of science—the study of open complex giant system and its methodology. J Syst Eng Electron 1993;4(2):2‒12.
[246] Helbing D. Globally networked risks and how to respond. Nature 2013; 497(7447):51‒9. 链接1
[247] Hasselmann K, Ligot A, Ruddick J, Birattari M. Empirical assessment and comparison of neuro-evolutionary methods for the automatic off-line design of robot swarms. Nat Commun 2021;12(1):4345. 链接1
[248] Materializing artificial intelligence. Nat Mach Intell 2020;2(11):653. 链接1
[249] Bongard J, Pfeifer R. How the body shapes the way we think: a new view of intelligence. Cambridge: MIT Press; 2010.
[250] Clark A. Being there: putting brain, body, and world together again. Cambridge: MIT Press; 2001.
[251] Sap M, Rashkin H, Chen D, LeBras R, Choi Y. Socialiqa: commonsense reasoning about social interactions. 2019. arXiv:1904.09728. 链接1
[252] Hutson M. AI glossary: artificial intelligence, in so many words. Science 2017;357(6346):19. 链接1
[253] Craig J. Cybersecurity research—essential to a successful digital future. Engineering 2018;4(1):9‒10. 链接1
[254] Khalid A, Kirisci P, Khan ZH, Ghrairi Z, Thoben KD, Pannek J. Security framework for industrial collaborative robotic cyber‒physical systems. Comput Ind 2018;97:132‒45. 链接1
[255] Zhang L, Merrifield R, Deguet A, Yang GZ. Powering the world’s robots—10 years of ROS. Sci Robot 2017;2(11):eaar1868. 链接1
[256] Bayat B, Bermejo-Alonso J, Carbonera J, Facchinetti T, Fiorini S, Goncalves P, et al. Requirements for building an ontology for autonomous robots. Industrial Robot 2016;43(5):469‒80. 链接1
[257] Haller A, Janowicz K, Cox SJD, Lefrançois M, Taylor K, Le Phuoc D, et al. The modular SSN ontology: a joint W3C and OGC standard specifying the semantics of sensors, observations, sampling, and actuation. Semant Web 2019;10(1):9‒32. 链接1
[258] Serano D. Introduction to JAUS for unmanned systems interoperability—joint architecture for unmanned systems. Report. S&T Organization; 2015. Report No.: STO-EN-SCI-271-02.
[259] Awad E, Dsouza S, Kim R, Schulz J, Henrich J, Shariff A, et al. The moral machine experiment. Nature 2018;563(7729):59‒64. 链接1
[260] Malle BF, Scheutz M, Arnold T, Voiklis J, Cusimano C. Sacrifice one for the good of many? People apply different moral norms to human and robot agents. In: Proceedings of 2015 10th ACM/IEEE International Conference on Human‒Robot Interaction; 2015 Mar 2‒5; Portland, OR, USA. New York: IEEE; 2015. p. 117‒24. 链接1
[261] Rich AS, Gureckis TM. Lessons for artificial intelligence from the study of natural stupidity. Nat Mach Intell 2019;1(4):174‒80. 链接1
[262] Livesey EJ, Goldwater MB, Colagiuri B. Will human-like machines make human-like mistakes? Behav Brain Sci 2017;40:e270. 链接1
[263] Sandoval EB, Brandstetter J, Bartneck C. Can a robot bribe a human? The measurement of the negative side of reciprocity in human robot interaction. In: Proceedings of 2016 11th ACM/IEEE International Conference on Human‒Robot Interaction (HRI); 2016 Mar 7‒10; Christchurch, New Zealand. New York: IEEE; 2016. p. 117‒24. 链接1











 京公网安备 11010502051620号
京公网安备 11010502051620号




