
《1. 引言》
1. 引言
大气边界层中的风流总是湍急的,任何关于风振问题的研究都必须正视这个问题,要么完全匹配湍流特性,要么在结论中承认不完全模拟的不确定性。在这个领域并没有太多研究关注湍流对气动弹力的影响。Scanlan和Lin [1]是使用桁架式桥梁节段模型的先驱,并且得出结论即颤振导数(FD)在均匀流和湍流中的差异不大。然而,Huston [2]以金门大桥的断面为模型进行了一个实验,得到了与Scanlan和Lin [1]及Haan和Kareem [3]完全不同的结论。在关于湍流对FD影响的研究中,自由振动技术得到了广泛应用,该技术使用节段模型,通过系统识别技术来提取FD。许多研究人员已经开发了各种系统识别技术:包括扩展Kalman滤波算法[4]、改性Ibrahim时域(MITD)[5]、统一最小二乘法[6]以及迭代最小二乘法[7]。在这些系统中,抖动力及其响应被视为外部噪声,在高风速下增加了难度。Bartoli和Righi [8]使用了组合系统识别方法(CSIM),该方法是基于Sarkar的MITD来同时提取二自由度(2DOF)矩形节段模型中的所有FD。他们得出结论,尽管特征湍流造成了局部噪声增加了难度,但是湍流中FD的识别还是成功的。他们成功的主要原因在于CSIM是一种确定性系统识别技术,湍流的影响被视为系统的有噪输入信号,这也导致了识别过程的其他问题。Nikita等[9]使用更精确的随机识别技术(协方差块汉克尔矩阵,CBHM)从来自全尺度监测的环境振动数据中提取得到了FD [10];该研究还说明了系统识别技术从现场测量数据中提取有价值结果的适用性。Kirkegaard和Ander sen [11]比较了三种状态空间系统:随机子空间系统识别[或者简单随机系统识别(SSI)]、矩阵块汉克尔(MBH)随机实现估计以及预测误差法(PEM)。结论是:SSI能够较好地估计模型参数和振型;相比于其他两种技术,MBH对于阻尼比和振型的估计结果很差;SSI比PEM快了大概10倍。
除了上述问题,自由振动技术还存在一个缺点。由于竖弯模态的气动阻尼过高,竖向自由振动数据迅速减少,因此在高风速范围内不能准确提取FD。基于这些考虑,应用了SSI技术从桁架式主梁断面的阵风响应中提取FD。本文采用湍流中的节段模型风洞试验来研究湍流对于桁架式桥梁断面FD的影响,应用只有输出的SSI技术从阵风响应中提取FD。为了与所提出的方法进行比较,还采用了自由振动方法进行测试。
《2. 实验设置和湍流产生》
2. 实验设置和湍流产生
风洞试验在横滨国立大学的闭口回流风洞中进行。试验段宽1.8 m、高1.8 m,研究对象是桁架式桥梁的断面部分(图1)。它是由木头按1∶80的比例制造的,代表大跨度悬索桥的横截面。节段模型的宽度和高度分别为363 mm和162.5 mm。单位长度的质量为8.095 kg·m–1, 单位长度的质量惯矩为0.2281 kg·m2 ·m–1。一阶竖弯频率 和阻尼比分别是1.869 Hz和0.00509,一阶扭转频率和阻尼比分别是3.296 Hz和0.004186。节段模型与一个刚性框架连接,并通过一根刚度为k的线性弹簧来支撑在每个拐角处。通过调节弹簧的安装位置,使得弹性中心和横截面的重心重合。测试在均匀流和湍流两种情况下进行。本研究中使用的湍流是用双翼木栅格生成的,并通过改变格栅与模型的距离来控制湍流特性。
《图1》

图1. 桁架式桥梁节段模型。
《2.1. 相对湍流强度》
2.1. 相对湍流强度
为了匹配模型的湍流功率谱和全尺度湍流的功率谱,Katsuchi和Yamada [12]引入了相对湍流强度(Ir)的概念,表示如下:

式中,Iu为顺风向湍流强度,由Iu=σu/U定义,其中,σu为湍流风速的标准差,U为平均风速;D为节段模型的高度;Lux为纵向湍流分量的积分尺度。在这项研究中,积分尺度由下式定义:

式中,npeak为约化功率谱达到最大时的频率。
表1描述了三种湍流参数的结果,Iu、Lux和Ir对应不 同的栅格-模型距离。Ir与Iu成比例增加,对于Lux则相反。
《表1》
表1 湍流参数

《2.2. 功率谱密度》
2.2. 功率谱密度
湍流强度和积分尺度无法完全描述湍流特性。Nakamura和Ozono[13]指出小尺度湍流对于流场和空气动力学参数的影响大于大尺度湍流。因此本研究还量化了湍流的功率谱密度(PSD)。图2(a)展示了顺风向湍流的无量纲PSD函数,以及von Karman和Eurocode1规范谱。与von Karman谱相比较,测试数据在高频区吻合良好,在低频区略高。湍流能量在大漩涡处(低频区)产生。对于大多数结构,这些低频波动没有明显的响应。图2(b)是在不同Ir下得到的三个谱,PSD函数的值随Ir的增大而增大。
《图2》

图2.纵向湍流分量的PSD函数。(a)与建议等式的比较;(b)不同Ir下的PSD。
《3. 模型动态响应》
3. 模型动态响应
测试在均匀流和湍流下进行,目的是量化湍流对于节段模型动态响应的影响。图3说明了在均匀流和多 种湍流下2DOF的振动幅度(竖弯和扭转模式)与约化风速(Vr=U/fB,其中,f为频率;B为节段模型宽度)之间的关系。在均匀流中,当Vr为0 ~ 9时,竖弯振动非常有限,但随后就会显著增加,然而,在这项测试中并没有发生竖弯发散振动[图3(a)]。另外,扭转位移非常小,直到Vr达到5.7时,才突然增加并发生振动 [图3(b)]。
《图3》
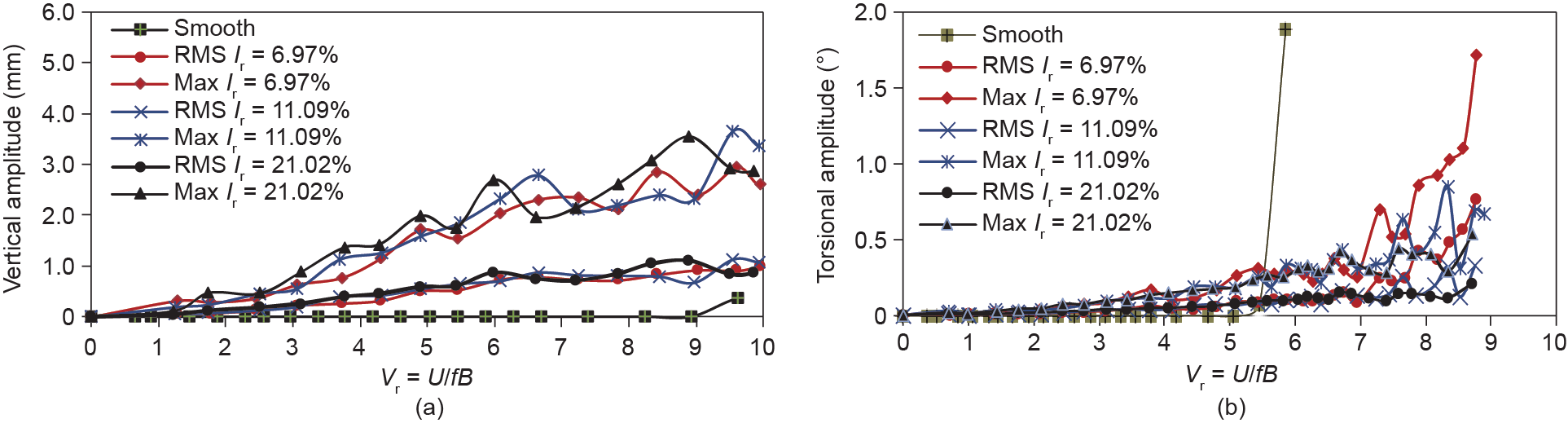
图3. 不同Ir下的模型响应。(a)竖弯振幅;(b)扭转振幅。注意RMS表示均方根,Max表示振幅最大值,Smooth表示均匀流条件。
当模型处于湍流环境时,即使在相对风速较小的情况下,也会出现竖弯和扭转运动。竖弯响应随Vr成比例增大,当Ir增大时,振动幅度略有增大。在湍流条件下,竖弯发散振动并没有发生。当Ir= 6.97%和Ir= 11.09%时,扭转位移随着Vr逐渐增加,并且分别在Vr=7.2和Vr=7.7时发生颤振。颤振速度比均匀流(Vr= 5.7)更快。并且,当Ir=21.02%时,颤振发生在Vr=8.6时(临界风速定义 在振幅为0.5°处)。
一般来说,节段模型上的湍流会引起比均匀流更大的振动,并且振动随风速成比例地增大;然而,湍流中 的振动并不像均匀流那样突然增大。湍流下的运动称为抖振响应;它会引发包括疲劳等一系列问题从而影响桥梁的使用状态。
《4.FD识别》
4.FD识别
在本研究中,湍流条件下桥梁断面的FD由SSI模型识别。本研究应用的理论主要是基于Peeters和Roeck的研究工作[14]。
《4.1.随机状态空间模型》
4.1.随机状态空间模型
考虑到湍流中的2DOF桥梁节段模型,作用于断面的脉动风可以通过自激力和抖振力的线性叠加获得,如下所示:

式中,m和I分别为质量和单位长度的极惯性矩;h和α分别为竖弯位移和扭转位移;(·)为时间微分;ωh=2πfh以及ωα=2πfα分别为竖弯和扭转模型的自然循环频率;ζh和ζα分别为竖弯和扭转模型的阻尼比;Lb和Mb分别为竖弯和扭转模型的抖振力;Lse和Mse分别为自激升力和俯仰力矩,由下式给出:
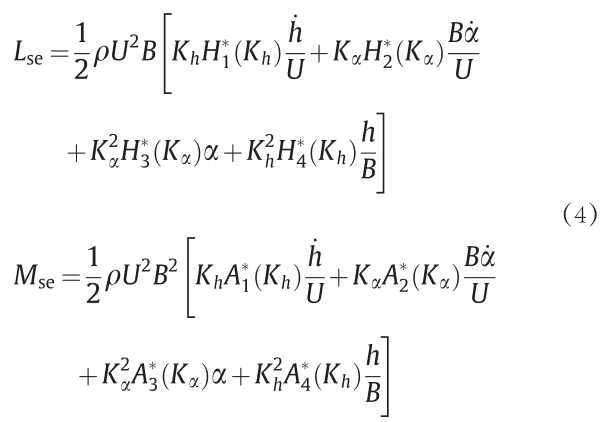
式中,ρ为空气密度;U为平均风速;B为桥梁断面宽度;Kk=ωkB/U为相对频率(其中,k=h,α);Hi*和Ai*表示FD(其中,i=1,2,3,4)。
将式(4)代入式(3),并且将气动阻尼和刚度移到左边,式(3)可以改写成下式:

式中,q(t)=[h(t)α(t)]T为产生的抖振响应;f(t)=[LbMb]T为抖振力;f(t)分解成矩阵B2和输入矢量u(t);M为质量矩阵;Ce为整体阻尼矩阵,包括结构阻尼和气动阻尼;Ke为整体刚度矩阵,包括结构刚度和气动刚度。
二阶微分方程式(5)可以转化为一阶状态方程,如式(6)所示:

其中

式中,Ac为大小为4×4的指定状态方程;x(t)为状态向量;Bc为输入矩阵;Iu为单位矩阵。
状态方程和观测方程的结合完整地描述了结构系统的输入和输出行为,所以将其命名为状态空间系统。

式中,y(t)为输出向量;Cc为输出矩阵;Dc为连续时间内的直接传输矩阵。
式(7)是一个连续时间内的确定状态-空间模型。“连续时间”意味着该表达式可以在任何时刻进行计算,“确定”意味着输入量和输出量可以精确测量。这并不实用,因为这些测试大多数都是在离散时间取样的,不可能测量所有的DOF,并且测试总是会造成干扰效应。针对所有的这些原因,连续确定系统转化为一种更合适的形式——离散随机状态-空间模型,如下所示:

式中, 为离散时间状态向量,包括离散取样位移qk和速度
为离散时间状态向量,包括离散取样位移qk和速度 ;wk为由扰动和模型误差造成的过程噪声;vk为由传感器误差造成的测量噪声;A和C分别为离散状态矩阵和输出矩阵;假定wk和vk是零平均值,它们的协方差矩阵如下所示:
;wk为由扰动和模型误差造成的过程噪声;vk为由传感器误差造成的测量噪声;A和C分别为离散状态矩阵和输出矩阵;假定wk和vk是零平均值,它们的协方差矩阵如下所示:

式中,指数p和q为时间常数;E为期望算子;δpq为克罗内克符号。相关系数E[wpwqT]和E[vpvqT]在不同时刻下等于零。Q=E[wkwkT],R=E[vkvkT],S=E[wkvkT]。进一步假定随机模型xk,wk和vk互相独立且均值为零。可以证明输出协方差R=E[yk+1ykT]对于任意时滞iΔt可以看作确定性线性时不变系统A,C,G的脉冲响应,其中G=E[xk+1ykT]是下一个状态输出协方差矩阵,如等式(10)所示。

式(10)被称为Lyapunov方程,表明输出协方差可以看作是脉冲响应。因此,随机系统的理论应用可以回溯到一个特征系统实现算法(ERA)[15]。
《4.2.数据驱动随机系统识别》
4.2.数据驱动随机系统识别
从l个传感器获得的输出测量数据(在本研究中,l=2,即竖弯和扭转)如下:

输出数据以2i个行和j个列组合在块汉克尔矩阵(H)中。汉克尔矩阵可以分为两部分:上部分是过去的产出,下部分是未来的产出,如下所示:

与CBHM或ERA方法类似,数据驱动的随机系统识别(SSI_data)直接实现实验数据的输出,而无需将输出数据转换为相关性、协方差或谱图[16]。SSI_data的主要步骤是将未来输出(Yf)的行空间投影到过去输出的行(Yp)中。正交投影Pi定义如下:

正交投影通过块汉克尔矩阵的QR分解实现,见式(12),定义如下:

式中,Q∈ℝj×j为一个正交矩阵QTQ=QQT=Ij,R∈ℝ2li×j为一个下三角矩阵。因为2li˂j,所以可能丢掉R中的零,以及Q中对应的零。
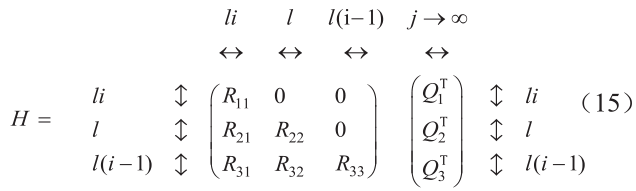
用式(15)取代式(13)中的输出汉克尔矩阵的QR分解,得到投影的简单表达式:

SSI的关键是将正交投影Pi分解成可观测矩阵Oi和Kalman滤波器状态序列 的乘积。
的乘积。

可观测矩阵Oi和Kalman滤波器序列 可以通过将单值分解应用到投影矩阵中获得:
可以通过将单值分解应用到投影矩阵中获得:

对比式(17)和式(18)可以得到:

式中,(·)†为伪逆矩阵。
如果汉克尔矩阵的过去输出和未来输出发生偏移,则能够实现时移投影:

其中

删除Oi的最后l行就可以得到Oi-1。偏移的状态序列可以通过式(20)计算,如下:

通过式(19)和式(22),可以只使用输出数据就得到Kalman状态序列 和
和 。状态和可控性矩阵可以从超定线性方程组中恢复出来,通过扩展式(8)得到:
。状态和可控性矩阵可以从超定线性方程组中恢复出来,通过扩展式(8)得到:
式中,Yiǀi为只有一个块行的汉克尔矩阵。由于汉克尔状态序列和输出是已知的,且残差[ρwTρvT]T与 不相关,因此可以用最小二乘法解方程组中的A和C:
不相关,因此可以用最小二乘法解方程组中的A和C:

《4.3.FD的识别》
4.3.FD的识别
通过解决状态矩阵的特征值问题可以获得系统模型参数:

式中,Ψ为复特征向量;Λ为复特征值和对角矩阵;Φ为振型矩阵。已知复模态参数后,式(5)中的整体阻尼矩阵Ce和整体刚度矩阵Ke就可由下式得到:

令 其中,C0和K0分别为静止空气条件下的系统结构阻尼矩阵和刚度矩阵。
其中,C0和K0分别为静止空气条件下的系统结构阻尼矩阵和刚度矩阵。
因此,2DOF系统的FD可以由下式得到:


《5.FD和对比》
5.FD和对比
抖振和衰减响应以100Hz的采样频率获得。图4显示了平均风速为6.7m·s–1时模型的时程响应。
《图4》

图4.桥梁节段模型响应(h代表竖弯,α代表扭转)。(a)抖振响应(U=6.7m·s–1);(b)自由衰减响应(U=6.7m·s–1)。
《5.1.通过抖振响应提取FD》
5.1.通过抖振响应提取FD
在高风速下,竖弯模态的气动阻尼过高,竖向自由振动响应过短,因此FD的提取精度不高。此外,使用自由衰减机理来描述实际风场激励下的真实桥梁行为是不实用的。另外,从抖振响应中提取FD更能反映了湍流风场中的全尺寸桥梁行为。即使在低风速下,桥面节段模型也会在湍流激发下振动。
这种方法比自由振动技术更简单,因为不会有操作员通过激励节段模型而造成干扰。图5和图6显示了在湍流(Ir=11.09%)条件下,由SSI_data方法从1DOF和2DOF系统的自由衰减响应和抖振响应中提取得到的桥梁断面的FD。一般来说,大多数FD与1DOF和2DOF系统的自由衰减响应和抖振响应都很吻合。从抖振响应中提取的竖弯相关阻尼FD(H1*)略高于其从自由衰减响应中得到的值。从抖振响应中提取的耦合项(H2*和H3*)比从自由衰减响应中提取的值更加离散,特别是在高相对风速下。在这两种情况下,FD的A3*值趋势类似。在这项研究中,断面外形是一个只发生扭转颤振的桁架式桥梁断面;因此,A2*是最重要的导数。从抖振响应中提取的A2*在低相对风速下离散,但是在高相对风速下,抖振响应的离散情况比在自由衰减响应中降低更多。抖振响应和自由衰减响应的结果趋势非常吻合。
《图5》

图5.通过1DOF和2DOF自由衰减响应测试和抖振响应测试得到的桥梁节段模型竖弯模态FD值(Hi*)(Ir=11.09%)。(a)H1*;(b)H2*;(c)H3*;(d)H4*。
《图6》

图6.通过1DOF和2DOF自由衰减响应测试和抖振响应测试得到的桥梁节段模型扭转模式FD值(Ai*)(Ir=11.09%)。(a)A1*;(b)A2*;(c)A3*;(d)A4*。黑线和红线分别表示2DOF自由衰减响应和抖振响应的拟合曲线。
《5.2.湍流对FD的影响》
5.2.湍流对FD的影响
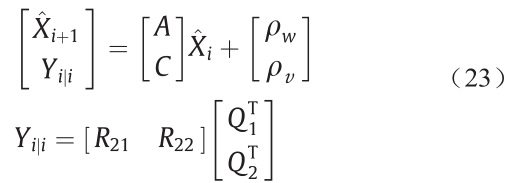
图7和图8说明了均匀流和不同Ir值湍流下的竖弯模态和扭转模式的FD值。可以发现在均匀流条件下,FDH1*值比湍流条件下减小得更快。这是因为均匀流条件下竖弯模态的阻尼比高于湍流条件。湍流对竖弯频率和扭转频率H4*和A3*的影响非常小,而且从抖振响应中提取的这些值在湍流中比在平滑流中略低。非对角项H2*,H3*,A1*和A4*在零附近波动,意味着在这项实验中没有出现耦合振动。在这些导数中,扭转阻尼项A2*在扭转颤振稳定性中起着重要作用,因为其正/负值对应于扭转颤振的气动不稳定性/稳定性。如图8所示,在均匀流条件下,当相对风速Vr=5.2时,A2*为正,与负的总扭转阻尼一致。气动扭转阻尼项A2*尤其说明了湍流流动对FD的显著影响:在Ir=6.97%和Ir=11.09%的情况下,Vr正值为6.5~7.8,而在Ir=21.02%的情况下,在Vr=8之前不发生颤动。另外,不同湍流强度对FD的影响相当有限。湍流对FD的影响取决于该断面。Sarkar等[5]发现湍流对流线型断面的影响较小,而对桁架式桥梁断面的测试则显示出明显影响,通过扭转阻尼项A2*可以清楚地显示该影响。
《图7》

图7.均匀流和湍流下由抖振响应造成的桥梁节段模型竖弯模态FD(Hi*)。(a)H1*;(b)H2*;(c)H3*;(d)H4*。实线是均匀流情况下的拟合多项式。
《图8》
图8.均匀流和湍流下由抖振响应造成的桥梁节段模型扭转模式FD(Ai*)。(a)A1*;(b)A2*;(c)A3*;(d)A4*。实线是均匀流情况下的拟合多项式。
在湍流中有两个因素可能会影响FD:展向湍流相干性和气动导纳。在图7和图8中,湍流效应可以通过一些FD项表现出来。在平滑和湍流的对角线项(H1*,H4*,A2*,A3*)可以看到明显不同的趋势。另外,在图5和图6中,对同一湍流应用不同的识别程序(抖振/自由衰减),差别又不是特别明显。或许可以从这些观察中得出结论,尽管均匀流和湍流中不同的展向湍流相干性会对FD的识别有严重影响,但是由会造成抖振响应的气动导纳不会严重影响FD的识别。
《5.3.颤振临界风速》
5.3.颤振临界风速
为了验证抖振响应下的FD识别结果,从2DOF系统中通过下面的运动方程得到了颤振临界风速(Vcr):

式中,
对于稳定性校核,只考虑了自激力,自激力中的Lh,Lα,Mh和Mα部分由下式定义

式中,LhR,LhI,LαR,LαI,MhR,MhI,MαR和MαI为自激力FD,可以与使用Scanlan形式的相比较,如:
本研究给出的桁架式桥梁节段模型FD是由图7和图8中得到的近似多项式。假定正弦运动q=q0exp(iωt),因为大跨度桥梁的结构阻尼可能非常小,所以式(28)中的阻尼矩阵可以去掉。空气动力学影响的运动方程可以写为:

求解作为本征值问题的式(31)可以得到系统的稳定条件。图9说明了扭转模式下气动阻尼的变化。颤振临界风速是扭转气动对数衰减与等效扭转结构对数衰减(δ=–0.0263)的交点。由FD得到的颤振临界风速与使用风洞动态试验得到的结果(图3)相吻合。当Ir=21.02%时,由FD得到的颤振临界风速(Vcr=8.2)略小于动力学测试得到的结果(Vcr=8.6)。
《图9》
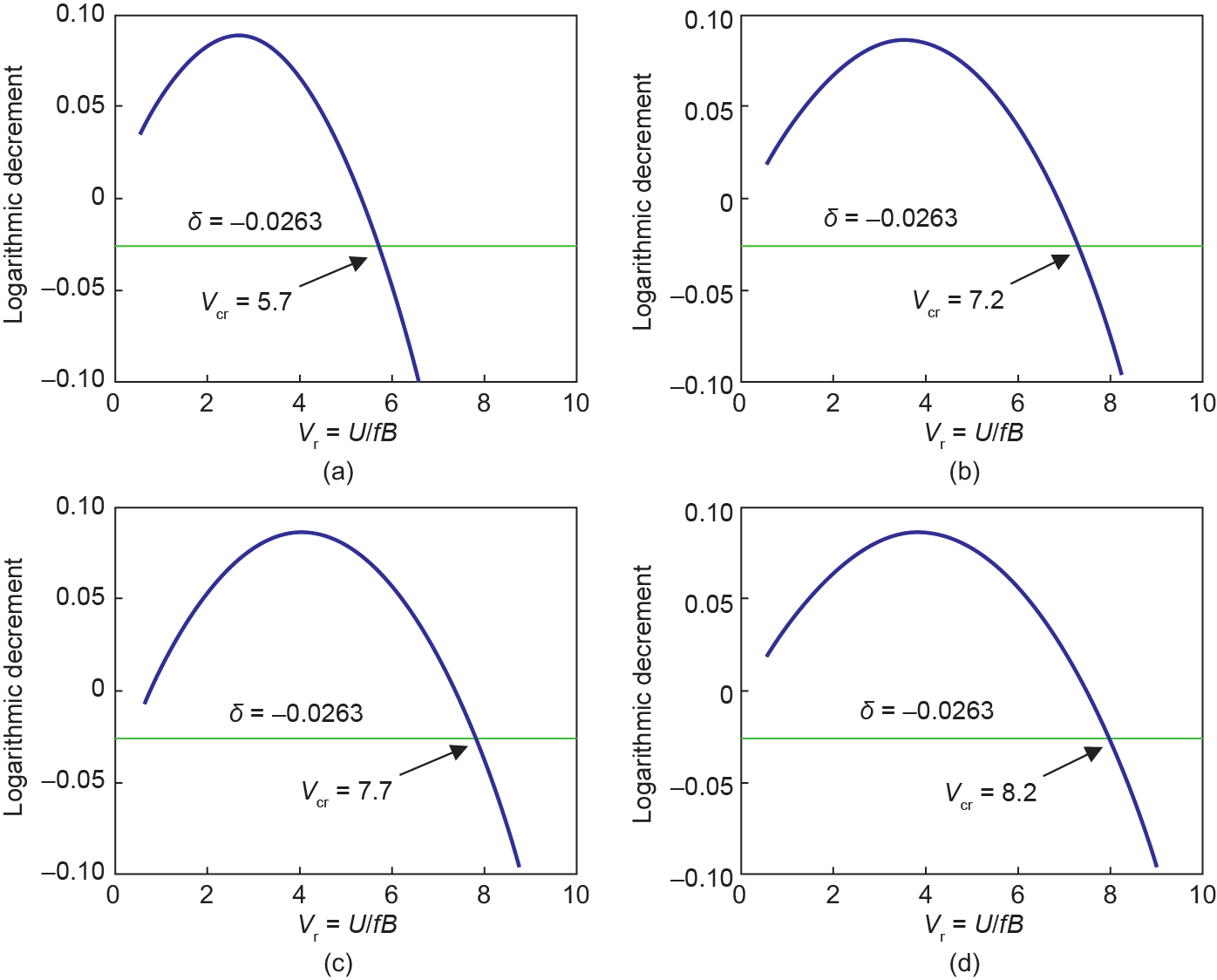
图9.总体对数衰减和颤振临界风速的变化。(a)均匀流;(b)Ir=6.97%;(c)Ir=11.09%;(d)Ir=21.02%。
《6.结论》
6.结论
本研究使用风洞试验和SSI方法研究了湍流对于桁架式桥梁断面FD的影响,得出以下结论:
(1)FD可以通过阵风响应成功获得。这种方法的优点包括能够很容易地获得阵风响应,并且这种方法比传统方法的耗时更少;特别是它的耗时长度使得即使在高风速情况下,也容易满足FD的提取要求——这种情况比传统方法更能反映出全尺寸桥梁的行为。
(2)SSI_data甚至可以从阵风响应中显示出良好的结果,因为这种方法具有将抖振力和响应视为输入而不是噪声的优点。
(3)湍流会严重影响桁架式桥梁的动力学响应和FD。在均匀流条件下,当Vr=8.6时,A2*为正;在湍流条件下,A2*衰减直到Vr=6.6~7.8,分别对应Ir=6.97%和Ir=11.09%的情况;当Ir=21.02%时,A2*的正值没有出现。
《Compliance with ethics guidelines》
Compliance with ethics guidelines
Hoang Trong Lam, Hiroshi Katsuchi, and Hitoshi Yamada declare that they have no conflict of interest or financial conflicts to disclose.











 京公网安备 11010502051620号
京公网安备 11010502051620号




