《1 前言》
1 前言
无源定位技术最早应用于潜艇的无源声纳对目标的探测、定位和跟踪。随着测量技术、信号截获和处理技术的发展,无源定位技术的研究和应用越来越广泛,越来越深入。无源声纳、无源雷达、红外监视系统的应用涉及到航海、航空、航天、通信和电子战等领域,如现代潜艇和战舰、机载预警雷达、反辐射导弹、天基红外监视系统、智能机器人等都配备了相应的无源定位系统。
由于无源测量不包含目标的距离信息,对于单站无源定位系统,仅利用单次无源测量不能实现对目标的定位,需要从多次含噪声的无源测量中估计出目标的位置、速度等状态,这就是单站无源定位的目标运动分析(TMA ,target motion analysis)问题。目标运动分析是单站无源定位与跟踪的一个重要问题,它包括可观性分析、目标状态估计算法和观测器运动轨迹优化 3 个方面的内容。可观测性分析是单观测器无源定位首先要研究的问题,只有当目标状态是完全可观测的,定位和跟踪问题才能有可靠的、唯一的解。
单站无源定位的可观性问题是非线性系统的可观测性问题,具体的讨论和分析要以深奥的李代数为数学工具[1] 。为了避免使用复杂的数学方法,对于无源定位的可观测性分析,工程界提出了很多不同的方法,从 20 世纪 70 年代到现在已经发表了大量的文章,主要集中在单站只测角无源定位问题可观测性分析上。处理问题的理论方法不相同,得出结论的表述方式也不尽相同。笔者将可观分析方法进行归纳,分为 3 类:几何方法、代数方程方法和线性系统方法,并以这 3 类方法进行单站测角无源定位的可观性分析,还将讨论含频率测量的无源定位问题的可观测性和定量的可观测性,并评述相关文献分析方法和分析结果之间的联系。
《2 单站只测角无源定位的可观测性》
2 单站只测角无源定位的可观测性
单站只测角无源定位(BOT,bearing only tracking)问题是最基本的无源定位问题。对于固定目标,只要观测器不沿视线(LOS)方向运动,目标总是可观测的,这本质上就是多点测向交叉定位。对于匀速运动目标的二维和三维 BOT 可观测性研究开始于 20 世纪 70 年代[2~4] ,并推广到了多项式运动模型机动目标及一阶时间相关模型机动目标[5,6] ,采用的分析方法也逐步多样化[5~15] ,将这些可观性分析方法归纳为几何方法、代数方程方法和线性系统方法 3 类。
《2.1 BOT 可观测性的几何分析法》
2.1 BOT 可观测性的几何分析法
为了给可观测性一个直观的解释,首先采用初等几何的方法来分析对匀速运动目标的二维 BOT 可观测性问题。
命题 1 从直线 A 上等间距的 3 点引出 3 条直线 L1 ,L2 ,L3 ,则过直线 L1 上的任意一点,都存在一条直线 B,它与 L2 和 L3 的交点等间距(见图 1)。
《图1》

图1 命题示意图
Fig.1 Graph for the proposition
证明:在图 1 直线 L1 上任取一点 P,过点 P 作直线 B1 ,将 B1 绕点 P 逆时针旋转至 B2 。设该直线与直线 L2 ,L3 交点为 P1 和 P2 ,两点间的距离表示为  。显然在旋转过程中比值
。显然在旋转过程中比值  由小到大连续变化,因而必然在某一位置取值为 1,即必然存在过 P 点的直线 B,使得
由小到大连续变化,因而必然在某一位置取值为 1,即必然存在过 P 点的直线 B,使得  = 。命题得证。
= 。命题得证。
设观测器作匀速直线运动,等间隔测量目标到达角(DOA),如图 2 所示,则由命题1可知,过 DOA 观测线的每一点,都有一条直线与 DOA 观测线交点为等间距。即过 DOA 观测线的每一点,都存在一条目标轨迹直线,满足匀速直线运动条件。因而有如下结论:
《图2》
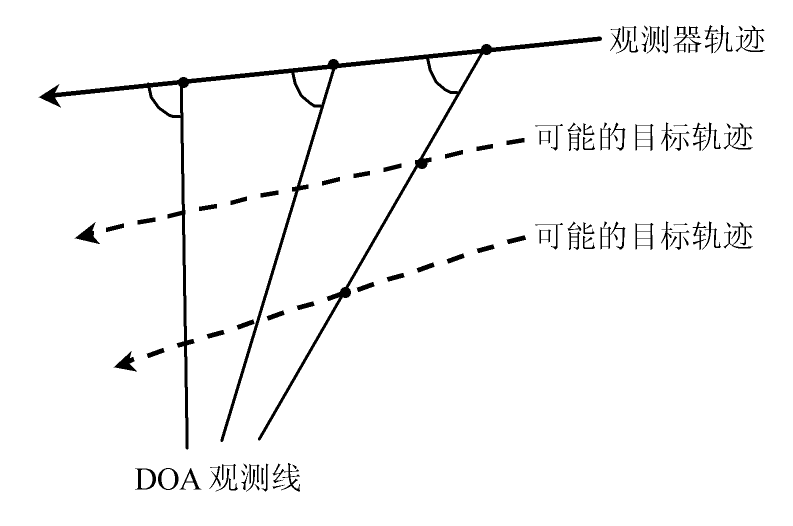
图2 匀速观测器对匀速目标测量 DOA 示意图
Fig.2 Constant velocity observer measures DOAs of constant velocity target
结论 1A 匀速观测对匀速目标是不可观测的。
当机动观测器的等间隔 DOA 测量(见图 3),它与图 3 中匀速观测器产生 DOA 测量相同,由结论 1A 知,此时对匀速目标也是不可观测的。因而有如下结论:
《图3》

图3 机动观测器对匀速目标不可观测的情形
Fig.3 Ambiguity in case of a constant velocity observer and a maneuver observer
结论 1B 观测器机动是对匀速目标可观测的必要条件,而不是充分条件。
结论 1A 和结论 1B 是 BOT 可观测性分析的最基本结论,几乎被所有可观性分析方面的文献或复述、或采用不同方法证明和推广。
由结论可知,对于匀速直线运动的目标,BOT 可观测必要条件是观测器机动。最常用的观测器机动方式是折线运动(multi-leg),文献[7]采用初等几何的方法,推导了观测器折线运动时对匀速目标距离的估计公式。
设折线观测器与匀速目标几何关系如图 4 所示(文献[7]中的图 3),折线观测器轨迹由 2 条直线段 S4S5 和 S5S6 构成,目标轨迹为直线 T4T5T6 ,观测器在 3 个点 S4,S5,S6(对应的目标点为 T4,T5,T6)分别测量 DOA 为 β4,β5,β6,则由正弦定理得:

《图4》
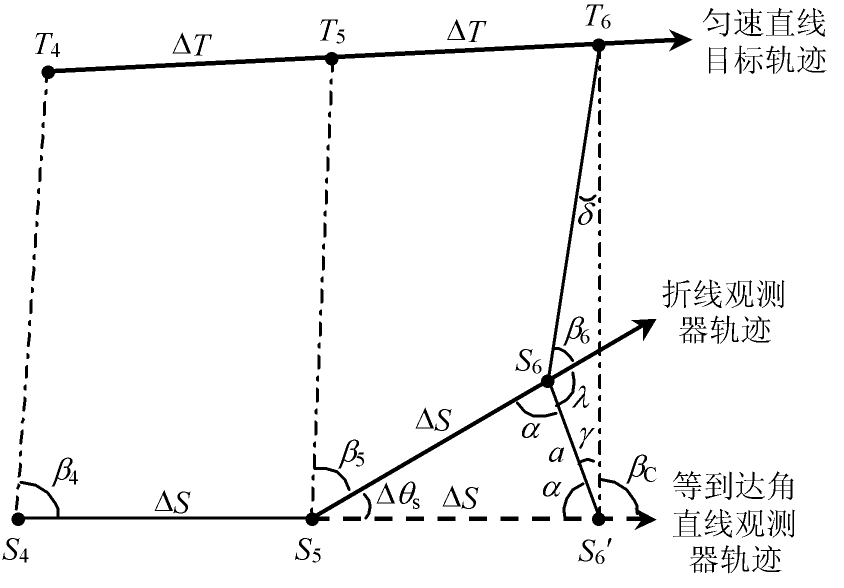
图4 折线观测器与匀速目标几何关系
Fig.4 Geometry between turning observer and constant velocity target
式中  是点 S6 与 S′6 之间的距离,S′6 是假设观测器仍然沿直线前进,在下一测量时刻的位置,由于观测器的运动是已知的,故 是已知量。
是点 S6 与 S′6 之间的距离,S′6 是假设观测器仍然沿直线前进,在下一测量时刻的位置,由于观测器的运动是已知的,故 是已知量。
式(1)中  ,
, 由下列公式计算,
由下列公式计算,

其中 Δθs 是观测器航向改变量,是已知量。文献[7]使用等到达角直线观测器轨迹,即假设有 βC = β4 = β5 + Δθs,将此条件代入式(1)和式(2)得到目标距离为

式(3)说明当观测器作折线运动,只需要 3 个到达角测量就可以确定匀速直线运动目标的距离,即对匀速直线运动目标是可观测的,但文献[7]得到式(3)要求图4中 S4S5S′6 构成等到达角观测器轨迹。
命题 2 匀速直线运动的观测器等时间间隔测量匀速直线目标的到达角 βk(k = 1,2,3,4,…)(见图 5),则可以通过 β1,β2,β3 计算出 βk(k = 4,…)。
《图5》

图5 匀速观测器对匀速目标测量 DOA 示意图
Fig.5 Constant velocity observer measures DOAs of constant velocity target
证明将图 5 重绘如图 6 所示,将一个测量间隔内目标的运行距离记为 d,观测器的运行距离记为 S,观测器轨迹与目标轨迹交角记为 θ,则有方程组:

《图6》
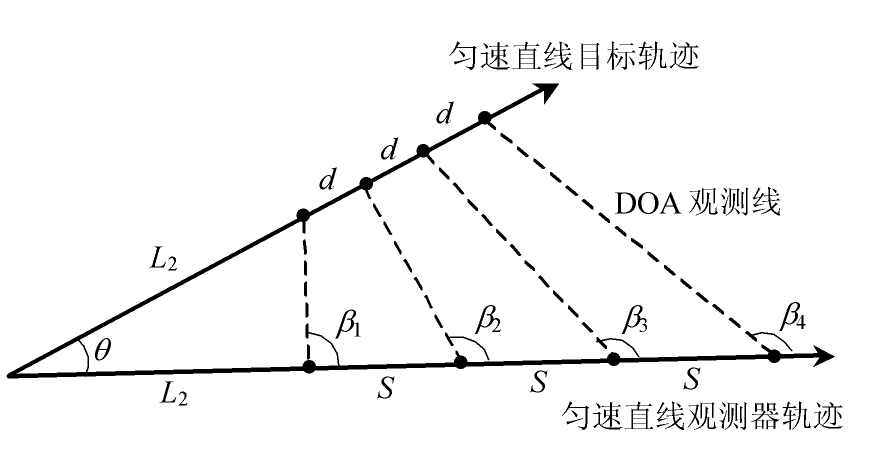
图6 匀速观测器对匀速目标测量 DOA 示意图
Fig.6 Constant velocity observer measures DOAs of constant velocity target
式(4)中共有 4 个方程和 5 个未知数(L1,L2,d,θ,β4),但解方程得到 β4 的表达式只与 β1,β2,β3 有关(具体过程略),从而证明了命题 2 。对于观测器轨迹与目标轨迹平行的情况,用同样方法可以证明命题 2 。
命题 2 说明,对于匀速目标和匀速观测器,只有 3 个到达角测量是独立的。即使图 4 中 S4S5S′6 不构成等到达角观测器轨迹,即等式 βC = β4 不成立,亦即 βC 未知,由命题 2 可知在观测器直线段积累 3 个到达角测量就可以计算出 βC 。因而有如下结论:
结论 2 当观测器作折线运动,只需要 1 次转折和 4 个到达角测量就可以确定匀速直线运动目标的距离。
文献[8]本质上也是采用初等几何的方法分析折线观测器运动形式对匀速目标的可观测性,并给出了距离和速度的计算公式。文献[7, 8]都采用数值仿真的方法验证了相关结论。
《2.2 BOT 可观测性的代数方程分析法》
2.2 BOT 可观测性的代数方程分析法
对于 BOT 可观测性分析,几何方法虽然直观,但应用范围限于直线和折线运动观测器对匀速运动目标的跟踪问题。
文献[5]以代数方程解的唯一性作为可观测准则进行了 BOT 可观测性分析,并将目标运动形式推广到时间的 N 阶多项式运动模型,所采用的方法形式上非常简便。文献[9]重述了这一方法并推广到包含频率测量的可观性分析。
设观测器与目标的几何关系如图 7 所示,在同一直角坐标系中,观测器的位置矢量记为 rob,目标的位置矢量记为 rT,记 r  rT - rob [ rx ry rz ]T,它们都是时间 t 的函数。观测器测量目标的 2 个到达角β,ε 。由图 7 可得到达角公式如下,
rT - rob [ rx ry rz ]T,它们都是时间 t 的函数。观测器测量目标的 2 个到达角β,ε 。由图 7 可得到达角公式如下,

《图7》

图7 观测器与目标几何关系图
Fig.7 Geometry between observer and target in 3D
到达角 β,ε 决定了观测站至目标的视线方向(LOS)。
目标不可观测等价为:至少有 2 个不同的目标运动轨迹 rT ,r′T 在相同的观测器视线方向上(有相同的到达角测量),即存在标量函数 α(t)> 0,使

成立。将时间的 N 阶多项式运动模型用集合表示为

其中 A =( )∈R3 ×(N + 1),t =(1(t - t0)…(t - t0)N)T 。设目标的运动方程为时间的 N 阶多项式,即有 r′T(t)∈PN ,rT(t)∈PN 。将 rob(t)= rT(t)- r(t)代入式(6)可得
)∈R3 ×(N + 1),t =(1(t - t0)…(t - t0)N)T 。设目标的运动方程为时间的 N 阶多项式,即有 r′T(t)∈PN ,rT(t)∈PN 。将 rob(t)= rT(t)- r(t)代入式(6)可得
 ( 7 )
( 7 )
其中  (t)=(α(t)- 1)-1 ,Bt = [ rT(t)- r′T(t)] 。因为 r′T(t)∈PN ,rT(t)∈PN,所以有[ rT(t)- r′T(t)]∈PN,即 B∈R3 ×(N + 1)。
(t)=(α(t)- 1)-1 ,Bt = [ rT(t)- r′T(t)] 。因为 r′T(t)∈PN ,rT(t)∈PN,所以有[ rT(t)- r′T(t)]∈PN,即 B∈R3 ×(N + 1)。
式(7)就是 BOT 问题不可观测的充分必要条件,总结为:
结论 3A 当目标的运动方程为时间的 N 阶多项式,则 BOT 问题可观测的充分必要条件是 r(t)≠ (t)Bt,其中(t)是任意的标量函数, B∈R3 ×(N + 1)。
结论 3A 用公式表示还是不太直观。若 rob(t)∈PN ,则有 r(t)∈PN ,此时式(7)必然成立,即目标不可观测,因此有如下结论:
结论 3B 当目标的运动方程为时间的 N 阶多项式,则 BOT 问题可观测的必要条件是观测器作更高阶次的机动。
结论 3B 是易于理解的,显然它是结论 1A 和结论 1B 的推广。需要强调的是,观测器作比目标运动更高阶次机动只是 BOT 问题可观测的必要条件,而不是充分条件。因为在某些条件下,即使当 rob(t) PN ,式(7)也是有可能成立的,如图 3 所示的情形就是一个例子。
PN ,式(7)也是有可能成立的,如图 3 所示的情形就是一个例子。
《2.3 BOT 可观测性的线性系统分析法》
2.3 BOT 可观测性的线性系统分析法
采用几何方法和代数方法分析 BOT 可观测性,方法简便,并且得到了关于 BOT 可观测性的最经典的结论。然而采用最广泛的可观测性分析方法还是线性系统分析法,这是因为该方法使用的模型同滤波算法相同,为该领域的研究者所熟知,而且该方法适用于更广泛的单站无源定位问题,能推导出更精致的结论。
2.3.1 线性系统可观测性理论
1) 线性连续时间系统的可观测性定理将系统的状态变量(包括位置、速度等分量)取 x(t) xT(t)- xob(t),即是目标状态变量与观测器状态变量的差。系统的状态随时间的变化规律称为状态模型或状态方程,一般用线性微分方程来表示:

式中输入量 u(t)对应观测器的机动。式(8)不仅适用于描述匀速目标,还适用于描述 N 阶多项式模型运动目标和具有更复杂运动形式的目标[16] 。
系统的测量量与状态变量的关系式称为测量方程。在无源定位系统中,采用线性的状态式(8),则测量方程一定是非线性的。为了使用线性系统可观测性分析理论,需要将非线性测量方程转化为伪线性测量方程。 BOT 问题的测量方程如式(5),转化为伪线性测量方程为

写成一般形式为

该方程是线性时变方程。
式(8)和式(11)是线性时变连续时间系统的状态方程和测量方程的一般形式。解式(8)得[17]

其中  (t,t0)/
(t,t0)/ = A(t)
= A(t) (t,t0),(t,t0)= I,当 A 是常值矩阵时 (t,t0)= exp A (t,t0);y(t)=
(t,t0),(t,t0)= I,当 A 是常值矩阵时 (t,t0)= exp A (t,t0);y(t)=  (t,
(t, )B()μ()d 。
)B()μ()d 。
结合式(11)和式(12)得

定义由式(8)和式(11)描述的系统在时间 [ t0,tf ] 上可观测性就是式(13)在时间 [ t0,tf ] 上关于 x(t0)的解的唯一性。
将式(13)两端左乘 T (t,t0)CT(t),然后积分,得到
方程(14)关于 x(t0)的解唯一的充分必要条件是矩阵  T(t,t0)CT(t)C(t)(t,t0)dt 可逆[14,17] ,由此得到如下定理:
T(t,t0)CT(t)C(t)(t,t0)dt 可逆[14,17] ,由此得到如下定理:
可观测性定理 1A 线性系统式(8)和式(11)在时间[ t0,tf ]上可观测的充分必要条件是 Gram 矩阵 T(t,t0)CT(t)C(t)(t,t0)dt 可逆。 Gram 矩阵可逆等价于矩阵 C(t)(t,t0)的列向量线性无关[17,18] ,因而有如下等价定理[10~14] :
可观测性定理 1B 线性系统式(8)和式(11)在时间[ t0,tf ]上可观测的充分必要条件是:对于任意的非零矢量  ,存在 t ∈ [ t0,tf ],满足 C(t)(t,t0) ≠ 0 。
,存在 t ∈ [ t0,tf ],满足 C(t)(t,t0) ≠ 0 。
说明由定理 1A 和定理 1B 可知,系统的可观测性完全由 C(t)(t,t0)确定,似乎可以推测出系统的可观测性与输入量 u(t)无关,u(t)是观测器的机动输入。事实上 u(t)的作用将改变 C(t),因而系统的可观测性与 u(t)无关的推测是错误的。
设矩阵 C(t)(t,t0)有 n 列(n =(维数)×(N + 1)),则其 n 个列向量线性无关的充分条件是:存在 t ∈ [ t0,tf ] ,其 Wronski 矩阵的秩为 n[17,18],记为定理:
可观测性定理 2A 线性系统式(8)和式(11)在时间[ t0,tf ]上可观测的充分条件:存在t ∈ [ t0,tf ],其 Wronski 矩阵(M(t) (t)… M(N - 1)(t))T 的秩为 n,其中 M(t)= C(t)(t,t0)。
(t)… M(N - 1)(t))T 的秩为 n,其中 M(t)= C(t)(t,t0)。 (t)表示 M(t)对 t 的 k 阶导数。
(t)表示 M(t)对 t 的 k 阶导数。
文献[17]给出了如下的等价的定理:
可观测性定理 2B 设 A(t)和 C(t)存在直至 n - 2 阶和 n - 1 阶连续导数,则线性系统式(8)和式(11)在时间[ t0,tf ]上可观测的充分条件:存在[ t0,tf ],使得矩阵( N0(t)N1(t)…Nn - 1(t))T 的秩为 n,其中 N0(t)= C(t),Nk + 1(t)=Nk(t)A( t)+  (t),k = 0, 1,…,n - 2 。
(t),k = 0, 1,…,n - 2 。
2) 线性离散时间系统的可观测性定理 当系统的测量量是离散的,测量方程是离散的。系统的连续状态方程和离散的伪线性测量方程为

可观测性定理 3 线性系统式(15)在时间[ t0,tM ]上积累(M + 1)个测量,其可观测的充分必要条件是 Gram 矩阵降  T (ti,t0 ) CT(ti)C(ti)(ti,t0)可逆。
T (ti,t0 ) CT(ti)C(ti)(ti,t0)可逆。
当 A(t)为常值矩阵时,将式(15)写成离散形式:

可观测性定理 4 系统式(16)可观测的充分必要条件是(C0 C1 F … CM FM)T 的列向量线性无关。
2.3.2 BOT 可观测性分析
1) N 阶时间多项式目标的 BOT 可观测性对于 3 维空间中 N 阶时间多项式运动的目标,将状态变量记为

其中用 rT(t)表示变量 rT(t)对时间的 N 阶导数。则有
 ( 17 )
( 17 )
使用式(10)作为伪线性的测量方程,因而有
 ( 18 )
( 18 )
将式(17)、式(18)代入定理 1B,得到可观测的充分必要条件为是 rT(t)≠ α(t)Bt [12],其中 α(t)是任意的标量函数,B∈R 3 ×(N + 1)。这与文献[7]采用代数方法得到的结论 3A 完全相同!文献[5, 12]在无源定位的可观测分析方面最具代表性,因而几乎被其后的所有相关文献引用。
同样是应用定理 1B,文献[10, 11]分别得到了 2 维和 3 维匀速目标的可观测条件,是文献[12]所分析问题的特例。
文献[3]应用定理 2A 分析 2 维匀速目标(n = 4)的 BOT 可观测性,文献[4]应用定理 2B 分析 3 维匀速目标(n = 6)的 BOT 可观测性,得到了可观测条件为
 ( 19 )
( 19 )
其中 v ( t ) =  ( t ),a ( t ) = aT ( t ) - aob ( t ) =
( t ),a ( t ) = aT ( t ) - aob ( t ) =  ( t ) 。
( t ) 。
对于匀速目标有 aT ( t ) = 0,因而有 r ( t ) = r ( t0 ) + ( t - t0 ) v ( t ) -  ( t -
( t -  ) aob ( ) d ,代入式(19)有
) aob ( ) d ,代入式(19)有

显然,式(20)是 r(t)≠  (t)Bt 的一个特例,对比式(7)可知,它只是可观测的必要条件。文献[5]还给出了一个实例来说明式(20)只是必要条件,文献[12]指出了文献[3, 4]结论出错的原因。
(t)Bt 的一个特例,对比式(7)可知,它只是可观测的必要条件。文献[5]还给出了一个实例来说明式(20)只是必要条件,文献[12]指出了文献[3, 4]结论出错的原因。
文献[13]推导了定理 1B,然后应用它分析了3维匀速目标的 BOT 可观测性,因而也是文献[12]所分析问题的一个特例。文献[13]给出了可观测条件:
 (21)
(21)
文献[14]应用定理 1B 推导了 3 维 N 阶多项式模型目标的 BOT 可观测条件为

 (22)
(22)
式中 α(t)满足 α(t0)= 1 的任意标量函数。
文献[6]应用定理 1B 推导了 3 维匀加速目标的 BOT 可观测条件完全同式(7),并指出

只是式(7)的一种特殊情况。
总之,文献[3, 4, 6, 10~14]应用线性时变系统的可观性定理,对 2 维、3 维匀速(N = 2)、匀加速(N = 3)、N 阶(N > 3)多项式目标的 BOT 可观测分析的结论就是结论 3A 。
文献[14]应用定理 1B 还得到:若将目标和观测器的运动限定在 2 个平行的平面上,结论 3B 中的必要条件成为充分必要条件。
结论 3C 设目标匀速运动,且目标和观测器在 2 个平行的平面上运动,则 BOT 可观测的充分必要条件是观测器机动。
文献[15]应用定理 3 分析了 2 维匀速目标的 BOT 可观测性,得到的结论为:
a. 当到达角测量的正切值是常数时,对目标不可观测;
b. 当观测器无机动,对目标不可观测;
c. 当只有 3 个独立的到达角测量时,对目标不可观测。显然,这与早期文献得到的结论 1 和结论 2 相同。
2) 一阶时间相关模型机动目标 BOT 可观测性 一阶时间相关模型的目标加速度和观测器加速度为

其中  ,
, ,uob 是已知常量,uT 是未知常量。
,uob 是已知常量,uT 是未知常量。
应用定理 1B,文献[6]得到了一阶时间相关模型机动目标的 BOT 可观测性结论:
结论 4 一阶时间相关模型机动目标的目标加速度和观测器加速度如式(24),则
a. uob = 0,即观测器不机动时,目标不可观测;
b. aT(t ) = aob(t),即观测器与目标的加速度相同,目标不可观测;
c. ≠ ,uob ≠ 0,即观测器机动且与目标的机动常数不同,目标可观测。
显然,结论 4a 结论 4b 是对结论 1 至结论 3 部分论断的重复。
3) 折线运动观测器对折线运动目标的 BOT 可观测性将时变线性系统近似等效为分段时不变离散线性系统,应用定理 4,文献[19]得到了折线运动观测器对折线运动目标的 BOT 可观测性结论:
结论 5 折线运动观测器对折线运动目标测量到达角,则
a. 只需要一次观测器转折,对匀速目标可观测;
b. 目标的转折时刻已知,观测器与目标的转折时刻不同,在观测器的每一直线段的到达角不恒等,则只需一次观测器转折对目标可观测;
c. 目标的转折时刻未知,观测器与目标的转折时刻不同,观测器转折和目标转折交替进行,目标可观测。
显然,结论 5a 与结论 2 相同。
《3 测频单站无源定位的可观测性》
3 测频单站无源定位的可观测性
在测量到达角的基础上增加频率测量可以改善单站无源定位的可观测性,提高定位精度。
《3.1 只测频单站无源定位的可观测性》
3.1 只测频单站无源定位的可观测性
设辐射源的信号频率 f0 是一个未知常量,由于多普勒效应,观测器接收的信号频率为

若目标不可观测,即至少有两条目标轨迹满足以上测量公式,

式中 r(t),r′(t)分别是两条目标轨迹对应的距离,f0,f′0 是两条目标轨迹下信号频率的计算值,c 是光速。文献[9]利用第 2.2 节介绍的代数方法得到了目标不可观测的充分必要条件为

式中 k = f0/f′0,a = r′(t0)- k· r(t0),D(t)是任意正交变换矩阵。
对于 N 阶多项式运动目标,根据式(27),文献[9]得到结论:
结论 6 对于 N 阶多项式模型运动目标,测频单站无源定位的可观测性为
a. 观测器采用多项式运动形式,当多项式阶次不高于 N + 1 时,目标一定是不可观测的;
b. 观测器采用多项式运动形式,当多项式阶次大于 N + 1 时,对目标的可观测的条件是矢量  (t)(m
(t)(m  N)不全部同方向。
N)不全部同方向。
《3.2 测频测角单站无源定位的可观测性》
3.2 测频测角单站无源定位的可观测性
设测量量为{β( t),ε(t),f(t)},此时目标不可观测的充分必要条件是式(6)和式(27)同时成立,文献[9]据此得到了目标不可观测的充分必要条件为

其中 
对于多项式运动目标和观测器,根据式(28),文献[9]得到:
结论 7 对于多项式模型的运动目标和观测器,测频测角单站无源定位的可观测性的充分必要条件是到达角测量不为一恒定值。
对于匀速运动的目标和观测器,文献[14]在 2 维情况下、文献[20]在 3 维情况下,应用可观测性定理 1B 得到了与结论 7 相同的结果,是结论 7 的一个特殊情况。
《4 关于定量的可观测性》
4 关于定量的可观测性
二值可观测性(observability)分析回答了目标状态“是”与“否”可观测的问题,经过多年的努力,可以说这个问题已基本解决。但研究者们同时发现,仅有二值可观测性分析还不够。 J. A. Fawcett[21] , C. Jauffret和 C. J. Musso)[22] 指出,即使完全满足可观测条件,单站无源定位系统的定位性能易受测量精度的影响而变得不稳定。另一方面,系统的定位精度强烈地依赖于观测器的运动轨迹。因此,仅仅有定性的二值可观测性分析是不够的,还需要引入定量的可观测性分析。
定量的可观测性称为可观测程度(degree of observability),J. P. Le Cadre 和 C. Jauffret 称为可估计性(estimability)[19] ,并将其定义为 det(FIM),即 Fisher 信息矩阵的行列式值。线性系统式(8)和式(11)在时间[ t0,tf ]上的 Fisher 信息矩阵为[23]
 (29)
(29)
线性系统式(15)在时间[ t0,tM ] 上积累(M + 1)个测量的 Fisher 信息矩阵为
 ( 30 )
( 30 )
式中 R 为测量误差的协方差矩阵。令 R = 1,则式(29)与定理 1A 中系统可观测性的判别矩阵相同,式(30)与定理 3 中系统可观测性的判别矩阵相同。
由此可见,Fisher 信息矩阵的奇异性反映了系统的可观测性,因而使用该矩阵行列式值或特征值表示定量的可观测性是合理的。
事实上,Fisher 信息矩阵的逆就是状态估计精度的下界[23] ,因而采用反映定位问题固有定位精度的任何量来表示可估计性都可以。文献[24~27]进行了可估计性分析,用来进行观测器轨迹优化。文献[24,25]采用 1/det(FIM)表示可估计性;文献[26]采用 - ln [ det(FIM)]和 gT(FIM)-1 g 表示可估计性,其中 g =  ,r 是目标至观测器距离,x 是状态变量;文献[27]则定义可用距离信息 ARI (available range information)来表示可估计性。
,r 是目标至观测器距离,x 是状态变量;文献[27]则定义可用距离信息 ARI (available range information)来表示可估计性。
单站无源定位系统一般采用如下非线性模型,
 ( 31 )
( 31 )
式中 h(·)是 H 非线性测量函数,v(k)是测量误差,w(k)是状态误差。这个系统的 Fisher 信息矩阵为

式中,Hi =  x(i)hT(x(i)),Rk = cov(v(k))。
x(i)hT(x(i)),Rk = cov(v(k))。
式(32) FIM 矩阵的奇异性也可用来作为非线性系统的可观测性判别准则[28] 。
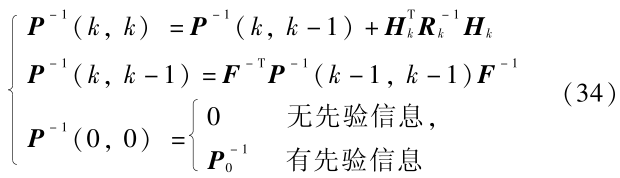
式(29)、式(30)、式(32)都是关于初始状态 x0 的估计量的 Fisher 信息矩阵。工程上通常使用关于 k 时刻当前估计量  (k,k)的 Fisher 信息矩阵,记为 FIM(k,k)。对于系统式(31)可以推出
(k,k)的 Fisher 信息矩阵,记为 FIM(k,k)。对于系统式(31)可以推出

估计量 (k,k)的 CRLB 记为 P(k,k)= FIM(k,k)-1 。在数值仿真中,代入真实的目标状态,这个量可以采用式(34)递推计算。
对于复杂的无源定位问题,理论上分析可观测性往往非常困难,因而可以采用仿真方法计算定量的可观测性。
《5 总结》
5 总结
单站无源定位可观测性问题的本质,是在给定测量集上对目标状态估计的唯一性问题。可观测性分析的结论可以粗略地概括为,状态可观测要求测量信息的变化速率要大于目标状态的变化速率。简单地说,对于只测角无源定位,要求观测器必须比目标作更高阶的机动,对于测频测角无源定位,要求到达角测量不为恒定值。
笔者的主要工作:将无源定位的可观测性分析方法归纳分类为三类———几何方法、代数方法和线性系统分析法;由简单到复杂,顺序地给出了单站无源定位的可观测性分析结论;讨论了定量的可观测性,它十分便于仿真计算。对相关的参考文献进行了较系统的评述。











 京公网安备 11010502051620号
京公网安备 11010502051620号




