
由于并联机构具有结构简单、精确度高以及可实现多方向运动等特点,逐步在多维减振领域得到广泛应用。文献[1]将 6 自由度 Stewart 平台应用到大型射电望远镜的减振系统中,采用电机驱动、主动控制,可实现 6 自由度减振,效果明显,但其结构复杂、成本高及耗能大,其实用性受到限制。马履中、尹小琴等已先后将三自由度、四自由度和六自由度并联机构应用到多维减振中[2~4] ,采用弹性阻尼系统作为减振执行器,结构简单、实用性强,取得了满意的效果,但其减振手段是被动的、不可控的。笔者在此基础上寻求一种既能控制减振、结构又简单、且实用性较强的多维减振机构和方法。
磁流变阻尼器(MR damper)是最新发展起来的半主动控制装置,通过改变其内部线圈中的电流来获得磁场强度的变化,从而使磁流变液体的粘度发生变化,并得到所需要的阻尼力。其特点是体积小、出力大、反应快和可靠性高;当控制电路部分失效时仍可作为被动式阻尼器工作,具有 fail - safe 的特点。因此,MR 阻尼器在汽车悬架、桥梁、建筑等减振控制中得到了广泛的应用[5~7] 。
笔者尝试选用 MR 阻尼器作为多自由度减振的执行器,以三平移并联机构作为减振平台主体机构,对其减振效果进行分析研究。
《1 MR 阻尼器的力学模型》
1 MR 阻尼器的力学模型
磁流变液的流变特性能随着外加磁场强度的变化而改变,因而能实现磁流变液表观粘度无级可调。 MR 阻尼器就是利用磁流变液的这一特点而设计的。图 1 为自行研制的 MR 阻尼器照片。磁流变液的本构关系可用 Bingham 模型来描述,即

《图1》
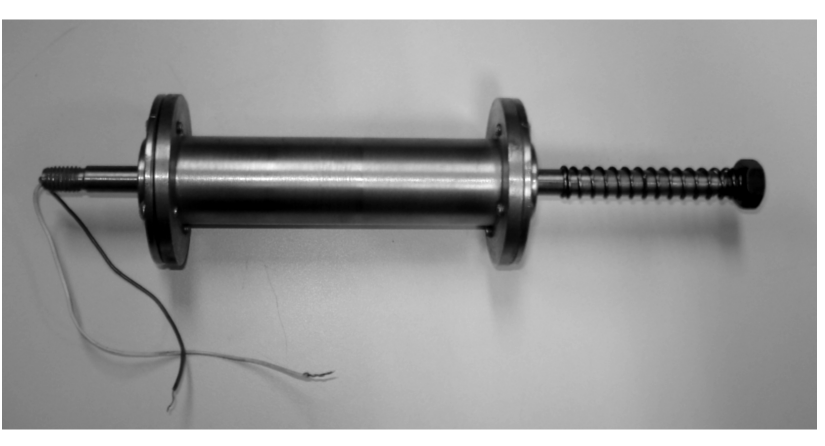
图1 MR 阻尼器
Fig.1 MR damper
式中 为剪应力;y 为磁流变液的剪切屈服应力;
为剪应力;y 为磁流变液的剪切屈服应力; 为剪切应变速率;η 为磁流变液的动力粘度;sgn 为符号函数。
为剪切应变速率;η 为磁流变液的动力粘度;sgn 为符号函数。
基于混合工作模式的 MR 阻尼器,其阻尼力由以压力工作模式的阻尼力和剪切工作模式的阻尼力叠加构成,可表示为


L 为活塞的长度;η 为未施加磁场时磁流变液的粘度;Ap 为活塞有效作用面积;D 为活塞直径;h 为磁极与阻尼器内缸的间隙;V(t)为活塞与缸体间的相对速度。
本系统所需的阻尼力相对较小,自行设计研制了一种小型 MR 阻尼器。通过试验,得到其阻尼力与线圈电流之间的关系如图 2 所示:电流在 0 ~ 1.8 A之间变化时阻尼力增幅较大,阻尼效果明显;电流大于 1.8 A 时,磁流变液磁路达到饱和,阻尼力增加趋缓。
《图2》
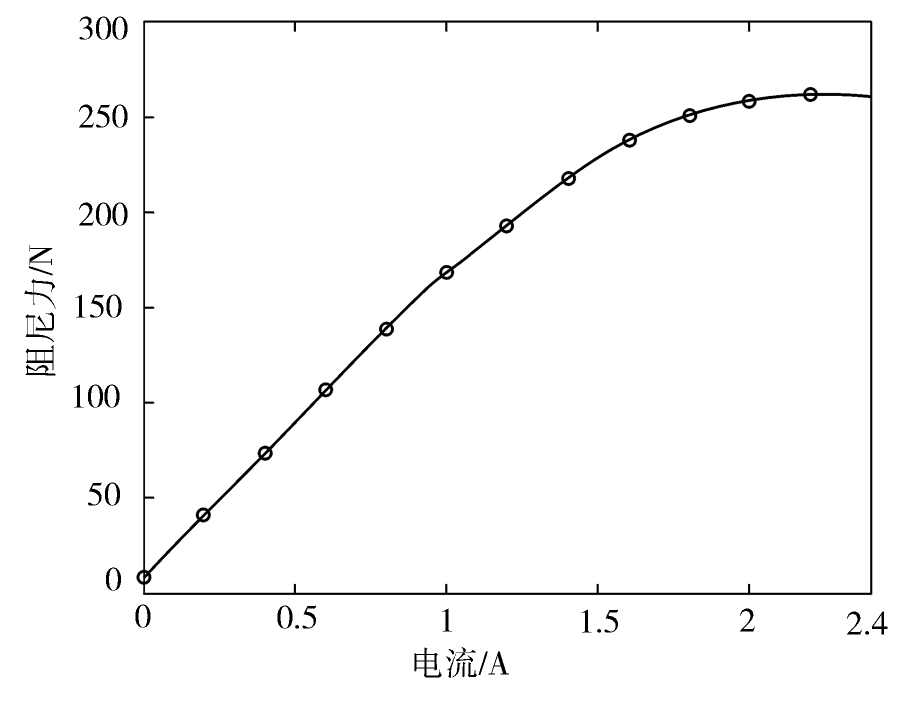
图2 阻尼力与电流之间的关系
Fig.2 Relation between damp force and current
《2 减振平台机构设计及运动学分析》
2 减振平台机构设计及运动学分析
《2.1 3-PUU 并联机构减振平台描述》
2.1 3-PUU 并联机构减振平台描述
以典型的三维减振为例,采用 3-PUU 并联机构作为减振装置的主体机构,以 MR 阻尼器作为减振手段,其结构简图如图 3 所示。该装置由动平台、静平台及三条支链组成,O, P 分别是静、动平台的圆心。每条支链的可伸缩杆 Ai Ci 的一端与静平台垂直固连于 Ai,Ai 均匀分布于静平台圆周;另一端以转动副 Ci 与平行四边形杆组相连,该平行四边形杆组的上端又以转动副 Bi 与动平台相连, Bi 亦均匀分布于动平台圆周,并且 OAi //PBi 。平行四边形四杆通过转动副两两相连,可实现平面内转动。移动副 Ki 由刚度和阻尼合适的弹簧 ki 与 MR 阻尼器构成的弹性浮动支撑。
《图3》

图3 机构简图
Fig.3 Diagram of mechanism
单纯的 3-PUU 并联机构可通过驱动三个可伸缩杆(MR 阻尼器)实现动平台运动,任意两条支链能够约束其绕 x,y 及 z 轴的旋转,因此动平台只能做空间平动[7] 。对于任意平行四边形杆,点 Bi 相对于 Ci 的运动方式实质上等同于在 Bi 和 Ci 处用一根虚拟杆相连,并在杆两端用虎克铰约束所实现的运动。
《2.2 位置逆解》
2.2 位置逆解
为了便于机构的位置分析,建立坐标系如图 3 所示。在静平台上建立定坐标系 O - XYZ, O 为静平台圆心,其中 Y 轴由圆心 O 指向 A1 ,Z 轴垂直于静平台竖直向上;在动平台上建立连体坐标系 P-xyz, P 为动平台圆心,y 轴由动平台圆心 P 指向点 B1 ,z 轴与 Z 轴同向。
假设 αi 是定坐标系中 OAi 与 X 轴的夹角,qi 为 Ai Ci 的长度,连杆 Ci Bi 的长度为 l,而  ,bi 分别为 OAi , PBi 的矢量,动静平台的半径分别为 rP ,rO,则动平台圆心 P 在定坐标系 O-XYZ 中的位置矢量可表示为
,bi 分别为 OAi , PBi 的矢量,动静平台的半径分别为 rP ,rO,则动平台圆心 P 在定坐标系 O-XYZ 中的位置矢量可表示为

式中 = rO  ;e = [ 0,0,1 ] T ;wi 为支链 Ci Bi 的单位矢量。由于该机构只做纯平动,故动静平台的姿态始终保持平行,ROP = E3 ×3 ,点 bi 在动坐标系 P-xyz 中的位置矢量可表示为
;e = [ 0,0,1 ] T ;wi 为支链 Ci Bi 的单位矢量。由于该机构只做纯平动,故动静平台的姿态始终保持平行,ROP = E3 ×3 ,点 bi 在动坐标系 P-xyz 中的位置矢量可表示为

将式(1)化为

将式(4)两边平方,得

由式(3)可解得各移动副的移动量为

式中 xP ,yP ,zP 分别表示 P 点在静平台定坐标系中的坐标。由图 3 可知,由于转动杆的约束,有 qi < zP ,故式(6)中取较小值。
《3 半主动控制策略》
3 半主动控制策略
《3.1 减振机构的数学模型》
3.1 减振机构的数学模型
由于 3-PUU 并联机构三条支链相互耦合的作用,使得动平台动力学方程十分复杂,不利于控制的适时性要求。考虑到科氏力/向心力是速度的平方项,在动平台速度较低的情况下影响很小,故可忽略。对于在平衡位置近旁的微幅振动而言,由于位移量很小,在系统的弹性势能远远大于重力势能的前提下,可忽略重力势能的影响。这样,根据并联机构的位姿关系,可得减振平台的动力学模型为

式中 M 为质量矩阵;C 为阻尼矩阵;K 为弹簧刚度矩阵;q, ,
, 分别为三条支路上磁流变阻尼器的位移、速度和加速度;J(q)为并联机构雅可比矩阵;w 为施加于动平台的扰动;u 为 MR 阻尼器施加的阻尼力。
分别为三条支路上磁流变阻尼器的位移、速度和加速度;J(q)为并联机构雅可比矩阵;w 为施加于动平台的扰动;u 为 MR 阻尼器施加的阻尼力。
按照并联机构的位置逆解,由式(6)可知,动平台的振动情况由三支路移动副的振动决定,必然随着支路振动的衰减而衰减。这样,实际上控制动平台的三维振动可转化为对三支路移动副的控制。在动平台运动过程中,其动态关系十分复杂,不利于控制算法的实现,为此,采用了稳态方法求解,即只考虑并联机构处于平衡位置附近的某个姿态下对三支路移动副进行控制。
引入状态向量 z =  ,式(7)可写成状态方程形式
,式(7)可写成状态方程形式

其中 y 为系统的输出向量,这里取并联机构三个移动副的绝对加速度;Γw = M -1 w;

O 和 I 分别是零矩阵和单位矩阵。
《3.2 LQR 控制算法》
3.2 LQR 控制算法
采用线性二次型最优控制算法(LQR)确定半主动控制中所需的最优控制力。根据式(6),首先由动平台的运动估计参数  ;然后采用 LQR 确定最优控制力,即对性能指标函数 J(t)求解最小值:
;然后采用 LQR 确定最优控制力,即对性能指标函数 J(t)求解最小值:

式中 Q 和 R 分别为对状态向量和输入变量的加权矩阵;tf 为控制作用的终止时间。
由线性二次型最优控制理论可知[8] ,若想使 J 最小化,控制信号应为

其中 P(t)为对称矩阵,可由 Riccati 微分方程求得; G 为状态反馈增益矩阵,可由 Matlab 软件控制工具箱中的 lqry 函数求得。整个控制算法可由图 4 描述。
《图4》

图4 LQR 控制框图
Fig.4 Frame diagram of LQR controlling
《3.3 半主动控制算法》
3.3 半主动控制算法
MR 阻尼器是通过变阻尼的方式产生所需的阻尼力,其控制方向是单向的,即只能提供与阻尼器运动速度相反方向的阻尼力。由 MR 阻尼器的力学模型可知,其产生的阻尼力是有限的,线圈中磁场为零时,阻尼力为 fmin,当线圈中磁场达到饱和时,阻尼力为 fmax,从而可以确定 MR 阻尼器半主动阻尼力的控制原则为
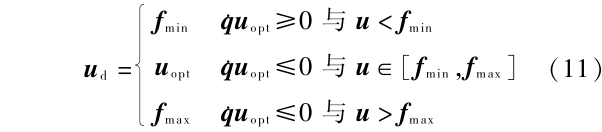
式中 uopt 为最优控制力。
《4 算例分析》
4 算例分析
为验证使用 MR 阻尼器对并联机构减振平台的减振效果,用 Simulink 仿真软件对构建的 3-PUU 并联机构减振平台进行仿真分析。建立的减振平台相关参数如表 1 所示。
《表1》
表1 3-PUU 减振平台结构参数
Table1 Parameters of 3-PUU damping platform

由图 2 可以看出,MR 阻尼器在电流为零时,阻尼力最小为 8 N;电流为 2.2 A 时,阻尼力最大为 260 N 左右。考虑到机构的摩擦力和移动副干扰力矩的影响,以及磁流变工作原理,可取 fmin = 10 N,fmax = 250 N,电流范围为 0 ~ 1.8 A 。取振动平台在平衡位置附近的某一位置结构参数作为控制模型的输入状态参数(取平衡位置)。在动平台上外加瞬时冲击:x 方向为 13 N,y 方向为 15 N,z 方向为 13 N,并使静平台保持自由运动,观测三条支路上 MR 阻尼器在有控和无控状态下加速度输出情况。
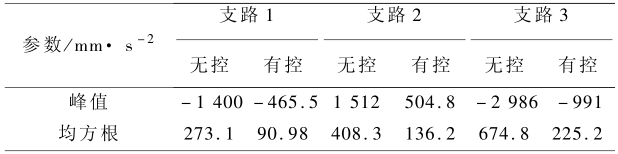
图 5 至图 7 为并联机构三支路上 MR 阻尼器在无控制和半主动控制状态下的加速度响应曲线。通过对表 2 中相关参数的比较分析可以看出,采用了 LQR 半主动控制算法有效地抑制了三支路的振动加速度,振动减小的幅度都超过 60 %,达到了预期的控制效果。
《图5》
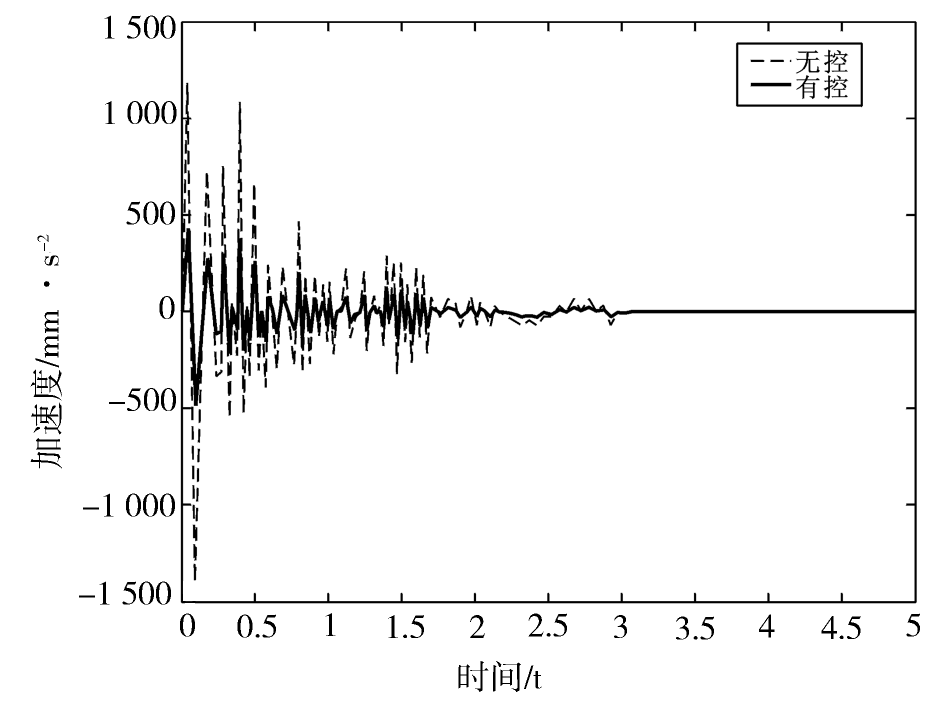
图5 有控和无控下支路 1 的加速度响应
Fig.5 Acceleration response of spur track 1st under on-control and off-control
《图6》
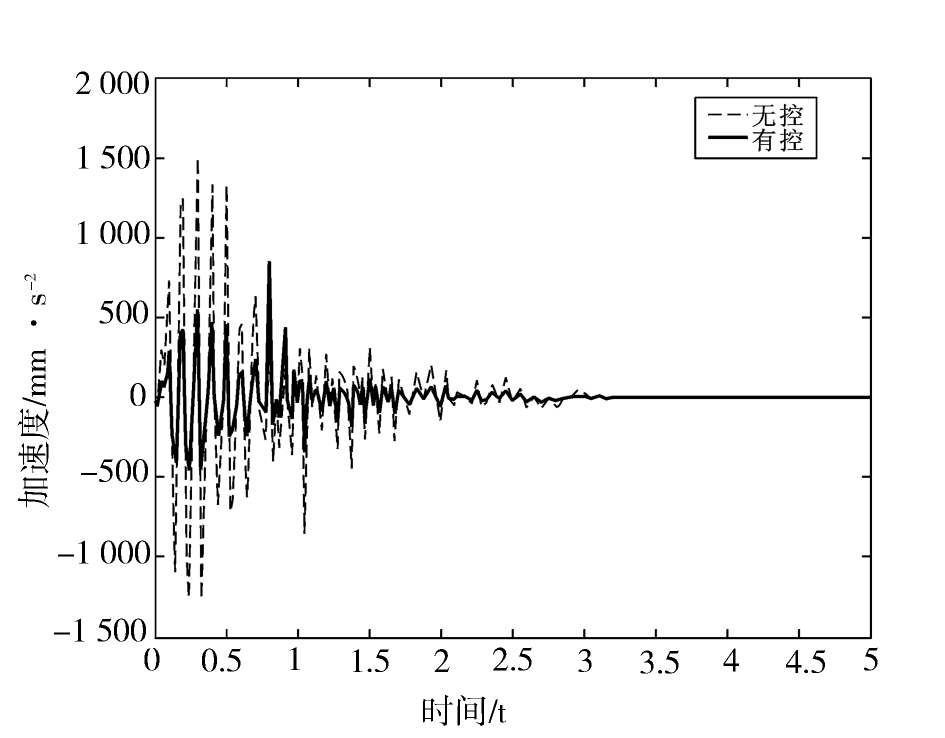
图6 有控和无控下支路 2 的加速度响应
Fig.6 Acceleration response of spur track 2nd under on-control and off-control
《图7》

图7 有控和无控下支路 3 的加速度响应
Fig.7 Acceleration response of spur track 3rd under on-control and off-control
《表2》
表2 三支路加速度响应相关参数
Table2 Parameters relating with acceleration response of three spur tracks
《5 结论》
5 结论
1) 采用 3-PUU 并联机构作为三向减振主体机型,解决了交通运输中仪器仪表的振动问题。
2) 自行设计了小型 MR 阻尼器,并将其应用于并联机构多维减振,解决了减振控制中耗能高的弊端。
3) 3-PUU 并联机构是耦合性较强的机型,动态关系比较复杂,不利于控制。采用稳态方法,可对机构运动过程中某一姿态进行控制。
4) 建立并联机构的位置逆解方程和动力学状态方程模型,采用线性二次最优控制算法(LQR)进行控制,并在 Matlab 软件中仿真,控制效果明显。











 京公网安备 11010502051620号
京公网安备 11010502051620号




