
《1 前言》
1 前言
摄影测量与遥感是一门“从影像重建被摄物体表面”的科学[1],国际摄影测量与遥感协会给它的定义是:从非接触成像和其他传感器系统,通过记录、量测、分析与表达等处理,获取地球及其环境和其他物体可靠信息的工艺、科学与技术[2]。其中,摄影测量侧重于重建物体的几何表面,并进行“量测”,如量测数字高程模型(digital elevation model,DEM),测绘地形图等。通过摄影测量技术能够将几百张乃至上千张航拍的照片高效、无缝的拼接在一起,生成正射影像图,为我们提供整个灾区完整的信息。乃至可以将 DEM 叠加到正射影像图上,进行距离、平面和高程的量测,或者利用 DEM 和正射影像图恢复灾区的三维模型,为救援行动提供重要的决策依据。
摄影测量学有着悠久的历史,从 19 世纪中叶摄影技术问世至今,它经历了模拟摄影测量、解析摄影测量和数字摄影测量三个发展阶段。从王之卓院士于 1978 年提出全数字自动化测图系统至今,我国数字摄影测量的发展始终走在世界的前列,特别是进入 21 世纪后,我国数字摄影测量以世人难以想象的速度发展,数字摄影测量工作站在中国的摄影测量生产中获得了普遍的应用与推广。
数字摄影测量网格(DPGrid)系统是在国家“ 985 ”工程支持下,由武汉大学研制的具有完全自主知识产权的全数字摄影测量并行处理系统。它是基于我国摄影测量学科多年来的研究成果,适应学科发展和时代需求,将计算机网络技术、并行处理技术、高性能计算技术与数字摄影测量处理技术结合,研究开发的高性能的新一代航空航天数字摄影测量处理平台,并在本次抗震救灾行动中发挥了显著作用。文章将结合 DPGrid 系统在“ 5· 12 ”汶川大地震中的快速响应,介绍数字摄影测量网格对海量应急航空摄影数据进行快速处理的关键技术及其在抗震救灾中的应用。
《2 抗震救灾中的应急航空摄影》
2 抗震救灾中的应急航空摄影
《2.1 应急航空摄影》
2.1 应急航空摄影
航空摄影测量是测绘的主要方法之一,一般需按航空摄影规范进行航线的设计,然后按预设的航线进行飞行和影像的获取,如图 1 所示。在常规航空摄影中,影像间的重叠度固定,并且旋偏角很小,这样才能保证空中三角测量的精度和测图要求,并且有利于匹配的自动化,减少数据处理的难度。
《图1》

图1 常规航空摄影
Fig.1 The conventional aerial photography
但是,地震是瞬间、突发性的自然灾害,“灾情就是命令、时间就是生命”,抗震救灾的航空摄影不可能按常规的航空摄影进行设计,特别是在地震灾害刚刚发生,为了第一时间获取通往灾区的主要道路、桥梁等交通设施的毁坏情况,就必须进行非常规的航空摄影,即沿着受灾严重的交通线与城镇进行连续的航空摄影,当飞机到达城镇上空时,需进行盘旋飞行以获取居民区更多的地面信息。图 2 为 2008 年 5 月 15 日“映秀—汶川—茂县”航空摄影三维航迹图。这种边飞、边看、边摄影的航空摄影就是抗震救灾、应急响应的航空摄影,可能用“航空侦察兵”更确切。
《图2》
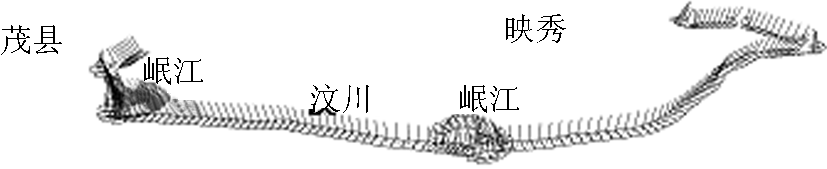
图2 2008 年 5 月 15 日“映秀—汶川—茂县”航空摄影三维航迹图
Fig.2 The 3D aerial line and image orientation of aerial photography on May 15,2008
《2.2 应急航空摄影数据特点》
2.2 应急航空摄影数据特点
应急航空摄影属于非常规航空摄影,它与传统航空摄影数据相比具有以下特点:
1) 地震受灾区属高山区,地形起伏大(最大高差 2897 m,相当于1/2 航高),造成影像间的重叠度变化大,难以自动确定匹配搜索范围,匹配自动化困难。
2) 转圈飞行导致相邻影像间的旋偏角大(最大旋偏角 30°),传统基于区域灰度的匹配(灰度相关匹配)方法不能适应大旋偏角立体像对的匹配,当旋偏角大于 15° 时,匹配的相关系数和可靠性急剧下降,甚至导致匹配无法进行。
3) 由于云层遮挡和相机重启等原因,形成断航线,传统航空摄影测量不能进行自动处理。图 3 为由云层遮挡(a)和相机重启(b)形成的断航线。
《图3》
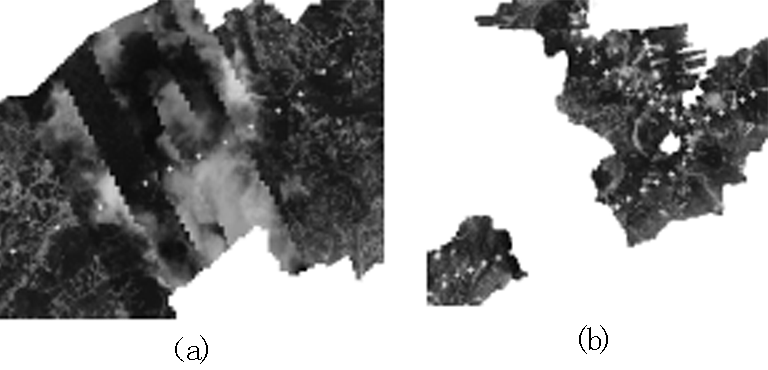
图3 由云层遮挡(a)和相机重启(b)形成的断航线
Fig.3 The broken strip because of cloud(a)and malfunction of camera(b)
4) 由于应急响应时没有布设 GPS(global position system)基站和地面控制点,因此 GPS/IMU(inertial measurement unit)系统没有经过检校,获取的 POS(position and orientation system)数据精度较差(利用原始 POS 数据直接进行交会的平均上下视差 6.8 像素,最大上下视差 16.8 像素) ,无法直接利用 POS 数据进行核线约束匹配和正射影像图的制作。图 4 为最大上下视差 0.202 mm(16.8 像素)的立体像对。
《图4》

图4 最大上下视差 0.202 mm(16.8 像素)的立体像对
Fig.4 Because of POS error the max vertical parallax is 0.202 mm( 16.8 pixels)
5) 因地震强烈,受灾面积大,对地观测面积广,获取的航空遥感影像为海量数据(达到了 1400 GB)。因此能否对海量应急航空摄影数据进行快速处理成为救援行动的关键。
以上特点都给数据的自动化处理带来了困难,如何对海量非常规的应急航空摄影数据进行全自动、快速处理,并及时地生成灾区正射影像图,是一项艰巨并具有挑战性的任务。
《2.3 应急航空摄影测区概况》
2.3 应急航空摄影测区概况
地震发生后,中国国土资源航空物探遥感中心(以下简称“航遥中心”)利用不同传感器对灾区进行了大量的遥感观测。在此次抗震救灾行动中,武汉大学需配合“航遥中心”快速完成的紧急任务是对震区 4507 幅、带 POS(GPS/IMU)的 DMC(digital mapping camera)航空数码影像进行快速处理,及时生成灾区 10 m 间隔 DEM 和 0.3 m 分辨率的数字影像图,并能快速地恢复部分重灾区的三维模型,为抗震救灾行动提供测绘数据支撑。以下是“航遥中心”获取的 DMC 应急航空摄影数据概况。
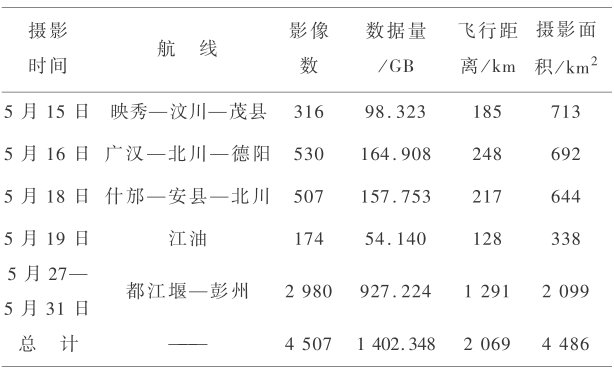
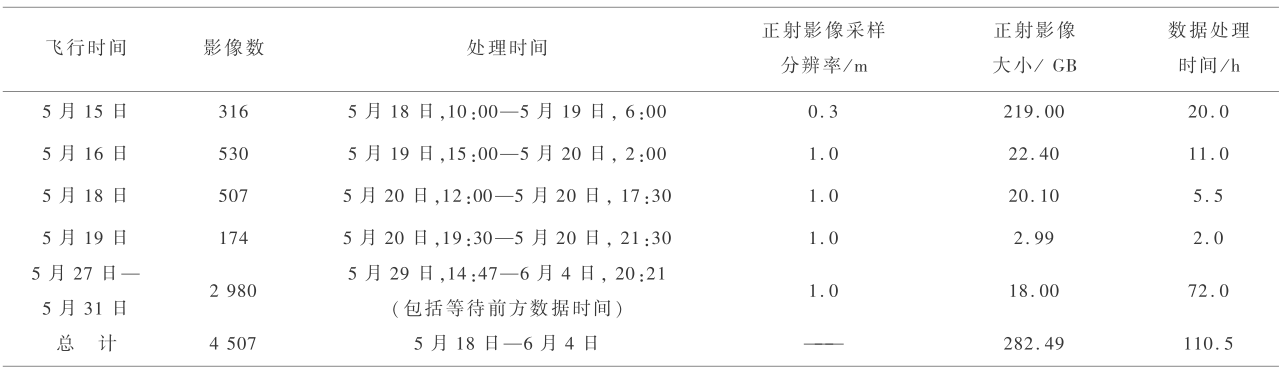
航线沿主要道路、河流等交通干线飞行,属非常规航空摄影。摄影区域覆盖震中汶川县及周边茂县、绵竹、什邡、安县、北川、绵阳、德阳、广汉、江油、都江堰、彭州等受灾县市,飞行距离 2 069 km,摄影面积约 4 486 km2,摄影比例尺 1∶25 000,地面分辨率 0.3 m,影像数 4 507 幅。彩图 3(见 89 页)为汶川震区 DMC 航空摄影示意图,表 1 为汶川震区 DMC 航空摄影数据说明。
《表1》
表1 汶川震区航空摄影数据说明
Table1 The aerial image data of Wenchuan earthquake area
《3 海量应急航空摄影数据快速处理》
3 海量应急航空摄影数据快速处理
传统的数字摄影测量工作站是基于单机的作业模式,其串行的计算方法已极大地束缚了航空摄影测量的生产效率,难以满足当前海量航空遥感影像快速更新的需求。同时,进入 21 世纪以后,计算机技术的迅猛发展,高分辨率卫星影像、线阵与面阵航空数码相机,Lidar,POS 等新一代传感器系统的迅速发展与广泛应用,也促进了数字摄影测量理论的发展,给数字摄影测量带来了新的机遇与挑战。DPGrid 系统正是适应时代需求,基于多年来我国在摄影测量学科上的科研成果和不断创新,成功地将计算机网络技术、并行处理技术、高性能计算技术与数字摄影测量处理技术相结合而研发的新一代航空航天数字摄影测量处理平台,其新的摄影测量理论与稳健的空中三角测量解析技术是 DPGrid 系统能够在本次抗震救灾行动中发挥重要作用的关键。
《3.1 数字摄影测量网格系统体系结构与并行机制》
3.1 数字摄影测量网格系统体系结构与并行机制
1) 硬件组成。DPGrid 使用集群计算机系统作为数据处理平台,利用高效的刀片服务器作为计算节点。刀片式服务器系统是一种高可用、高密度的服务器平台[3~5],它的硬件系统主要包括四大部分 : 刀片服务器,磁盘阵列,工作站和千兆以太网交换机。每个刀片服务器有自己独立的 CPU( center processing unit),内存,硬盘和操作系统,每个刀片服务器为一个计算节点[6,7]。磁盘阵列作为文件服务器,用于存储海量航空影像数据。工作站作为客户端,用于管理和分发任务。刀片服务器,磁盘阵列和客户端通过千兆以太网交换机和光纤通信等设备建立连接,集合成一个服务器集群。在集群模式下,所有刀片服务器可以连接起来提供高速的网络环境,同时可以资源共享。另一种方式是利用 PC 作为 DPGrid 的计算节点,在此次汶川大地震的抗震救灾行动中,就是利用航遥中心 3 台 PC 作为计算节点完成了此次海量航空影像的快速处理任务。
2) 并行处理机制。图 5 为集群计算机系统的体系结构与工作流程[8,9]。客户端(工作站)负责管理和分发任务,刀片服务器根据接收到的任务,从磁盘阵列取出影像进行处理,然后将结果存入磁盘阵列。客户端要根据测区影像创建测区任务表,通过 TCP/IP 协议与服务器建立连接,并将测区任务分成若干子任务分配给每台刀片服务器。当刀片服务器接收到任务时,启动该服务器上相应的计算模块对磁盘阵列中的数据进行计算。当刀片服务器处理完任务以后将会返回成功消息给客户端。
《图5》
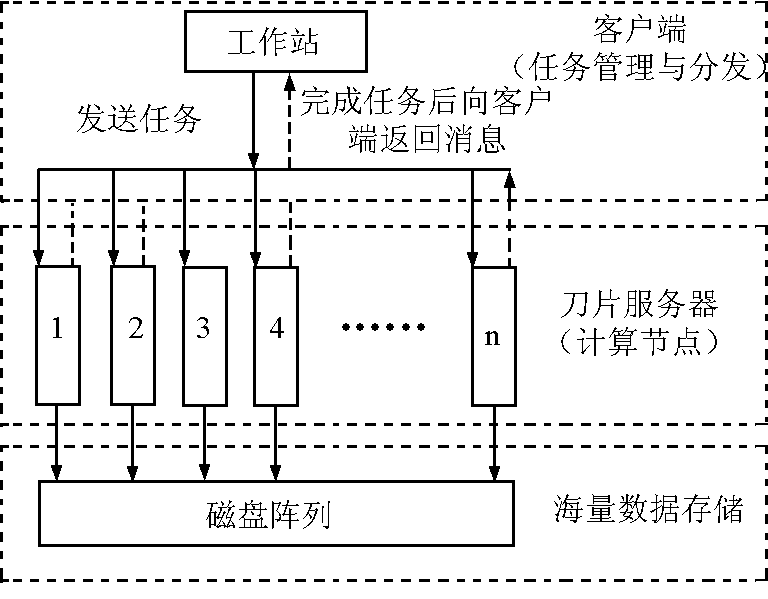
图5 集群计算机系统的体系结构与工作流程
Fig.5 The architecture and work flow of cluster computer system
3) 任务的管理与分发。客户端根据测区影像创建测区任务表,并通过 TCP/IP 协议建立与服务器间点对点的连接。客户端根据与服务器的连接状态自动将任务表内的子任务发送到可用的刀片服务器进行处理。当某台刀片机服务器返回任务完成信息后,客户端将继续给该台服务器分配新的任务。
如果任何一台服务器的任务处理失败,客户端将会此服务器的任务重新分配给其他服务器。例如,有 10 台刀片服务器(Blad1,Blad2,…,Blad10),要对 1000 幅影像进行处理,客户端将分配给每台刀片服务器 100 幅影像的计算任务。如果 Blad1 的任务处理失败,客户端将会终止对 Blad1 继续发送任务消息,并将 Blad1 的任务重新分配给其余 9 台刀片服务器(Blad2,Blad3,…,Blad10)。图 6 为集群计算机任务的管理与分发流程图[8]。
《图6》
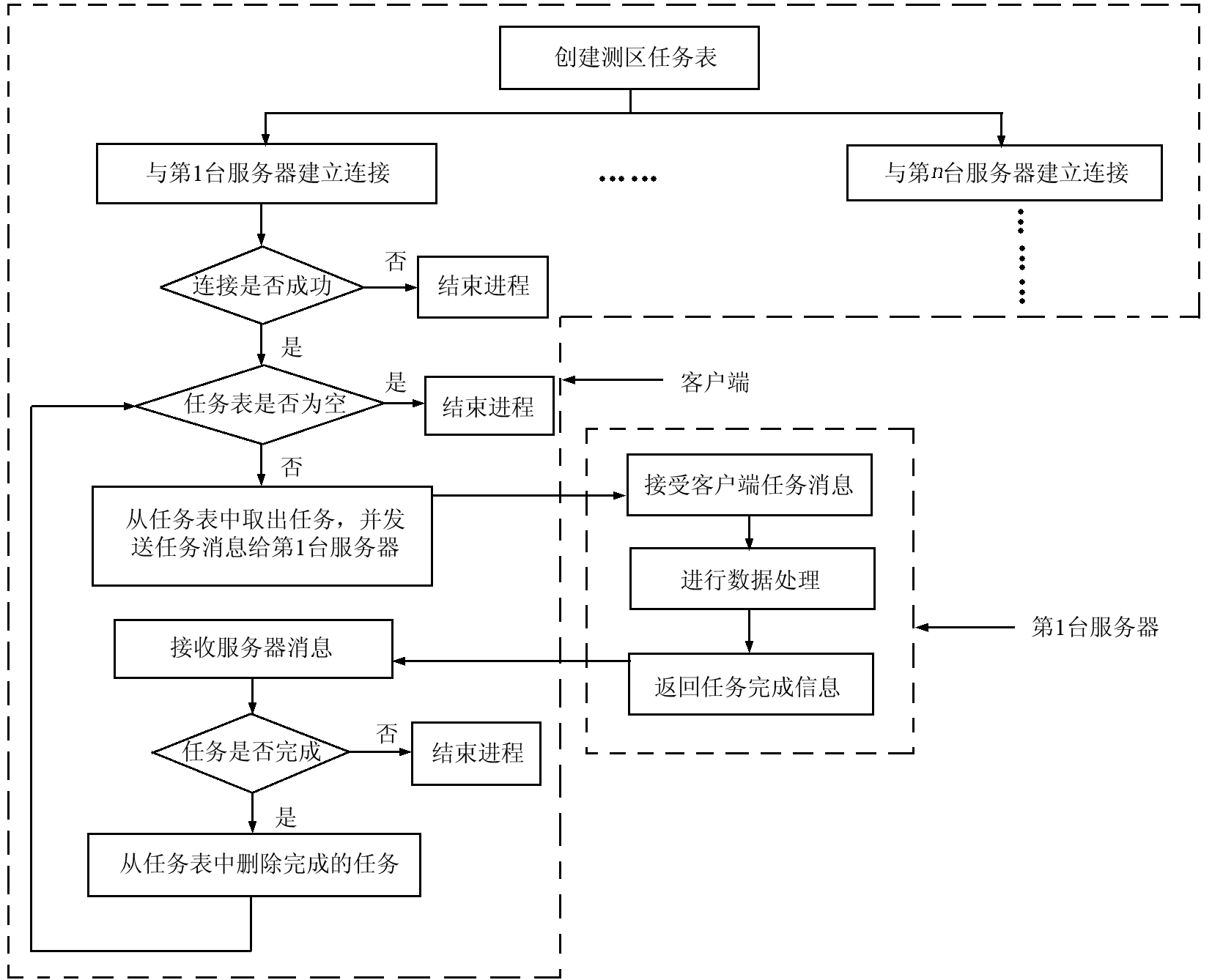
图6 集群计算机任务的管理与分发流程图
Fig.6 The work flow of tasks management and dispatching
《3.2 海量应急航空摄影数据快速处理关键技术》
3.2 海量应急航空摄影数据快速处理关键技术
1) 基于 SIFT 特征算子的大旋偏角立体像对全自动匹配。摄影测量中立体像对的量测是提取物体三维信息的基础,在数字摄影测量中是以影像匹配代替人眼立体观察,从而达到自动确定同名点的目的。基于区域灰度的匹配是数字摄影测量中最常用的匹配方法,如互相关和最小二乘匹配等。基于区域灰度的匹配优点是匹配精度高,缺点是需要知道影像间的概略重叠度来确定匹配的搜索范围,当搜索范围增大时,运算量增大,误匹配率也会增加。同时,当影像间的旋偏角和比例尺差异较大时,基于区域灰度的匹配往往失败。
在非常规的应急航空摄影中,影像间的重叠度和旋偏角变化大,因此难以自动确定匹配的搜索范围。并且传统的基于区域灰度的匹配算法不适应大旋偏角立体像对的匹配,当旋偏角大于 15° 时,匹配的相关系数和成功率会急剧下降,甚至无法进行相关。彩图 4(见 90 页)为旋偏角为 30° 的立体像对利用灰度相关进行匹配的结果,误匹配率达到了 100 % 。
SIFT 特征匹配是国际计算机视觉研究领域较成熟的特征匹配方法,它利用 SIFT 特征描述算子可实现任意旋偏角的立体像对匹配,并且无需知道影像间的重叠度。SIFT 算子最早由 D. G. Lowe 于 1999 年提出,但直到 2004 年 D. G. Lowe 才对该算子做了全面的总结,并正式提出了一种基于尺度空间的、对图像缩放、旋转甚至仿射变换保持不变性的图像局部特征描述算子———SIFT(scale invariant feature transform)算子[10]。
SIFT 特征描述算子主要包括以下 4 个步骤:
1) 尺度空间的极值探测。将输入影像通过不同尺度(σ)的高斯核函数连续滤波和降采样(Sub - Sampled),形成高斯金字塔影像,然后再对相邻尺度的两个高斯图像相减得到 DOG(difference of gaussians)高斯差分尺度空间,对 DOG 尺度空间每个点与相邻尺度和相邻位置的点逐个进行比较,得到的局部极值(最大值或最小值)位置即为关键点所处的位置和对应的尺度。
2) 关键点的精确定位。通过曲面拟合的方法对关键点进行精确定位,使匹配精度能够达到子像素。
3) 确定关键点的主方向。利用关键点的局部影像特征(梯度)为每一个关键点指定一个主方向(梯度最大的方向),即在以关键点为中心的邻域窗口内(16 × 16 像素窗口),用直方图统计窗口内的梯度方向,直方图的主峰值(最大峰值)代表了关键点处邻域梯度的主方向,即作为关键点的主方向。
4) 关键点的描述。图 7 为由关键点邻域梯度信息生成的特征向量。首先将坐标轴旋转到关键点的主方向,然后以关键点为中心取 8 × 8 的窗口,如图 7(a)所示,图 7(a)中的黑点为当前关键点的位置,每个小格代表关键点邻域所在尺度空间的一个像素,箭头方向代表该像素的梯度方向,箭头长度代表梯度大小。分别在每 4 × 4 的小块上计算 8 个方向的梯度方向直方图,绘制每个梯度方向的累加值,即可形成一个种子点,如图 7(b)所示,图 7(b)中一个关键点由 2 × 2 共 4 个种子点组成,每个种子点有 8 个方向向量信息。这种邻域方向性信息联合的思想增强了算法抗噪声的能力,同时对于含有定位误差的特征匹配也提供了较好的容错性。
《图7》
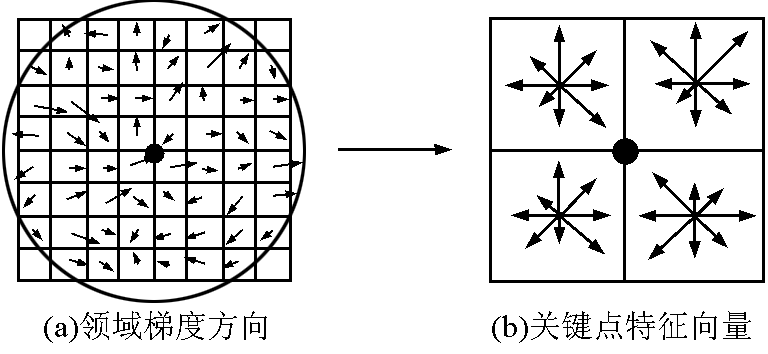
图7 由关键点邻域梯度信息生成的特征向量
Fig.7 The SIFT descriptor
为了增强匹配的稳健性,对每个关键点使用 4 × 4 共 16 个种子点来描述,这样对于每个关键点就可以产生 128 维的向量,即 SIFT 特征向量。图 8 为缩小 27 倍的 DMC 立体像对(285 × 513 像素)上提取出的关键点梯度矢量。箭头的起点为关键点的位置,箭头的方向代表该关键点所处邻域的主梯度方向,箭头的长度代表梯度的大小。
《图8》

图8 缩小 27 倍的 DMC 立体像对上提取出的关键点梯度矢量
Fig.8 The keypoint gradient vectors of DCM image pair (1/27 of original size)
此时的 SIFT 特征向量已经去除了尺度变化、旋转等几何变形因素的影响。当两幅影像的 SIFT 特征向量生成后,采用关键点特征向量的欧式距离作为两幅影像中关键点的相似性判定度量。在图 7(a)中取出某个关键点,并通过遍历找出其与图 7(b)中欧式距离最近的前两个关键点。如果最近的距离与次近的距离比值少于某个阈值(经验值 0.8),则接受这一对匹配点。图 9 为图 8 立体像对 SIFT 特征匹配结果。
《图9》

图9 图 10 立体像对 SIFT 特征匹配结果
Fig.9 The result of SIFT feature matching
因此,SIFT 特征是图像的局部特征,其对旋转、尺度缩放、亮度变化保持不变性,因而特别适用于重叠度未知、大旋偏角立体像对的匹配。但是 SIFT 算子具有多量性,即使很小的影像或少数几个物体也能产生大量的特征点。特别是遥感影像,其纹理丰富,一块 150 × 150 像素的遥感影像就能产生 1400 个特征点。如果利用标准的 SIFT 算法来遍历比较每个特征点是不现实的(除非影像很小),并且 SIFT 特征算子的定位精度不及最小二乘匹配。
为了实现大旋偏角立体像对的快速、高精度匹配,可先将原始影像缩小进行 SIFT 特征匹配,利用特征匹配结果计算出影像间的旋偏角 θ 和重叠度(用于确定灰度相关匹配的搜索范围);然后利用计算出的旋偏角将右影像旋转-θ 角度,再对立体像对进行多级金字塔的灰度相关,并在原始立体像对上进行最小二乘匹配。彩图 5(见 90 页)为旋偏角为 30° 的原始立体像对匹配结果(SIFT 特征匹配+灰度相关),匹配时间 92 s,匹配点数 7958,误匹配率小于 1/1000,利用匹配结果进行相对定向的上下视差 0.58 像素。
2) 无控制点 GPS/IMU 数据平差解算。 由于灾情紧急,虽然在飞行过程中记录了影像的 POS(GPS/IMU)参数,但由于没有在地面布设 GPS 基站和外业控制点,因此无法对 POS 系统进行检校,POS 数据存在较大的系统误差,如图 4 所示。因此,原始的 POS 数据首先不能直接用于核线匹配,其次不能将 POS 参数直接作为影像的外方位元素用于正射影像的纠正。
因此需在无地面控制点的条件下对 POS 数据进行平差解算,从而消除 POS 数据的相对误差。图 10 为利用立体匹配结果进行无控制 POS 平差解算后图4立体像对的上下视差(0.0066 mm,0.55 像素),与图 4 结果相比较可以看出,无控制点的 POS 平差有效地消除了 POS 数据间的相对误差。
《图10》
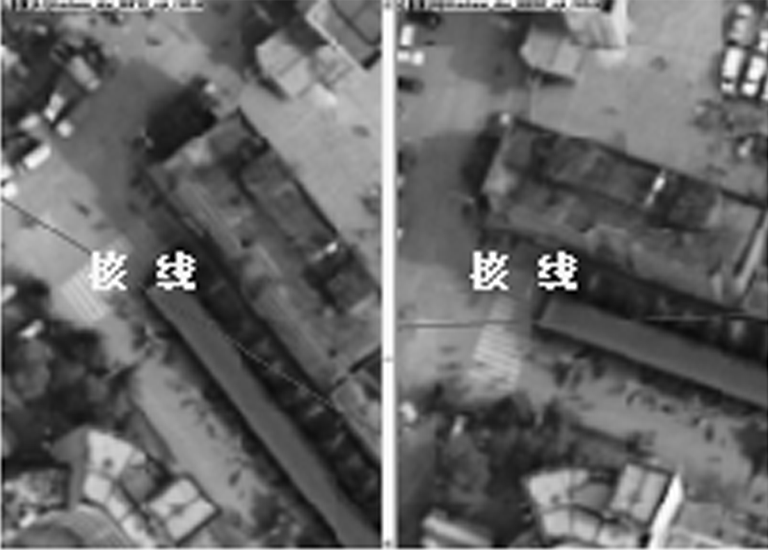
图10 无控制 POS 平差解算后图 4 立体像对的上下视差(0.55 像素)
Fig.10 The vertical parallax is reduced to 0.55 pixel after bundle adjustment with POS data
3) 多片匹配。由于立体匹配只进行相邻影像间的匹配和转点,因此对于“转圈”飞行的航空摄影数据,“进圈”影像和“出圈”影像间没有连接点,并且由于 POS 的线性漂移,造成“进圈”影像和“出圈”影像之间的POS参数存在较大误差。彩图 6(见 90 页)为由 POS 数据误差产生的正射影像拼接误差。
多片匹配可利用概略的 DEM 、较精确的影像外方位元素和共线条件(见图 11)作为约束,同时考虑多幅影像上的同名特征来进行快速匹配,并且多片匹配的结果具有较多的多余观测,可提高匹配的可靠性。因此,对于“转圈”飞行的航空摄影数据,利用平差后的 POS 参数和立体匹配结果生成的概略 DEM,可通过多片匹配进行快速、高精度匹配,并获得“进圈”影像和“出圈”影像间的连接点。彩图 7(见 91 页)为多片匹配平面示意图。彩图 7 中,背景为由彩图 6(a)转圈飞行数据生成的正射影像,黄色十字丝为曝光点,黄色线段为拼接线,箭头方向示意匹配关系;彩图 7 中(a),(b),…(j)为片号(按影像拍摄顺序),其中(a),(b),(c)三张影像为进圈影像,(d),(e),…(j)7张影像为出圈影像。图 12 为彩图7的多片匹配结果,图 12 中的影像(a),(b),…(j)分别与彩图 7 中的影像对应,红色十字丝为匹配点。
《图11》
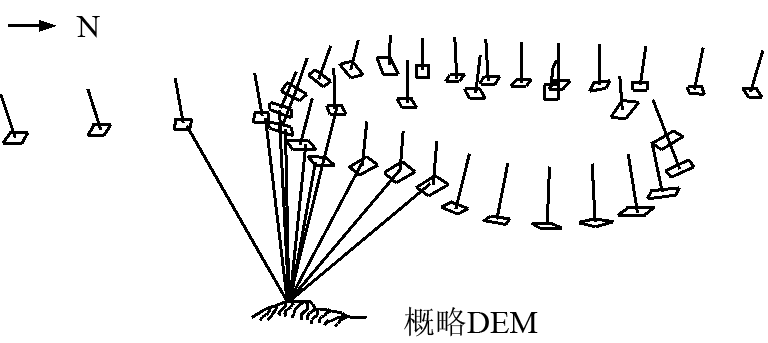
图11 基于 POS 数据的多片匹配(彩图 6 转圈飞行数据)
Fig.11 Object space matching 3D illustrative diagram (6 color circular motion flight data)
《图12》
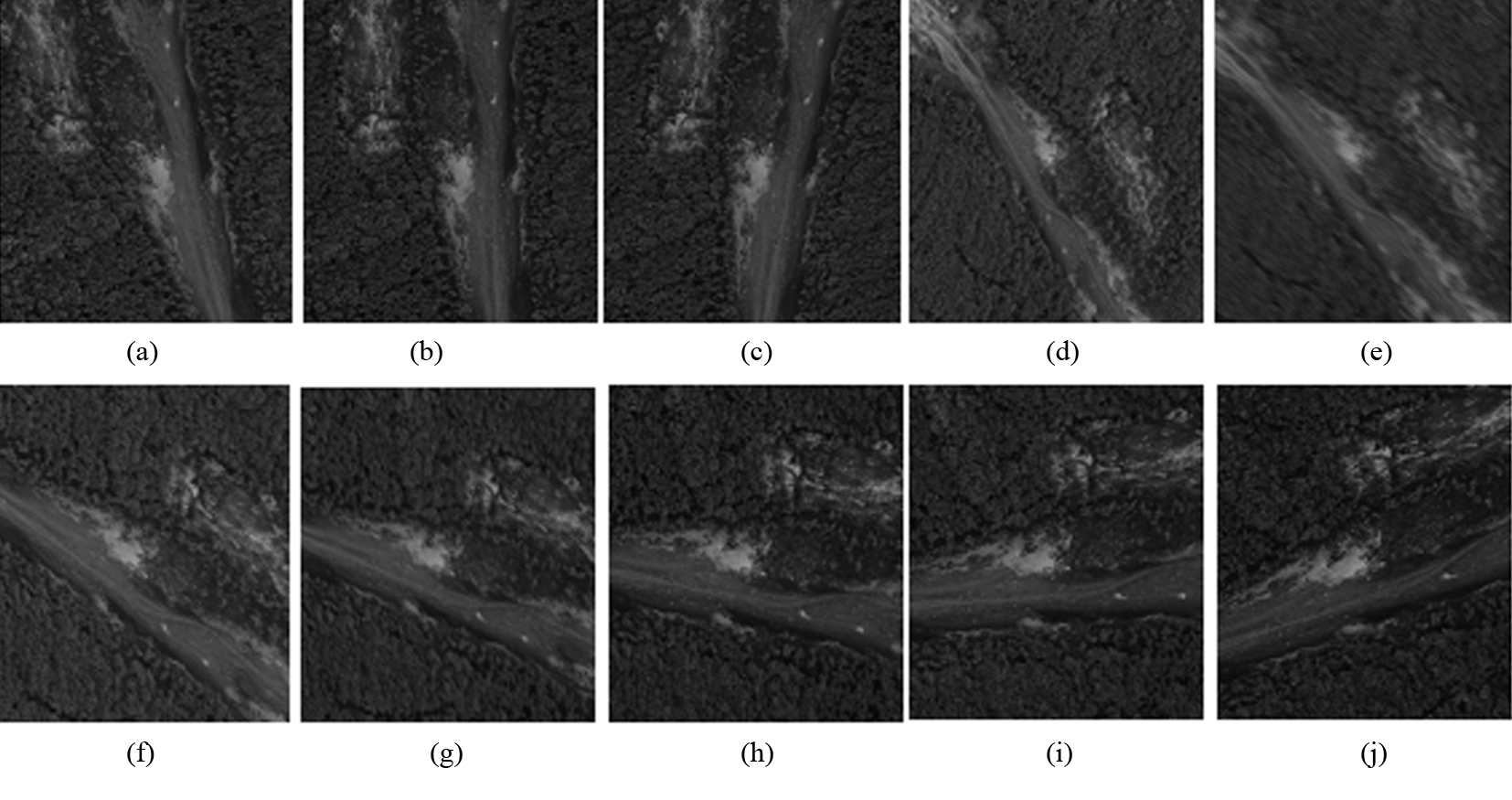
图12 彩图 7 的多片匹配结果
Fig.12 The result of object space Matching
利用多片匹配获得的加密点,再次对 POS 数据平差,即可进一步消除“进圈”影像和“出圈”影像间的 POS 相对误差,图 13 为利用多片匹配结果进行无控制 POS 平差后生成的正射影像。与彩图 6(b)比较可以看出,平差进一步消除了进圈影像和出圈影像 POS 数据间的相对误差。
《图13》

图13 利用多片匹配结果进行无控制 POS 平差后生成的正射影像
Fig.13 The bundle adjustment with tie points generated from object space match and without ground control points remove the mosaic error of ortho image
4) 基于 Vorinoi 图的自动拼接线。传统数字摄影测量工作站的正射影像图生产是按单模型生成 DEM 和数字影像图,并且由人工选择拼接线,不但接边工作复杂,而且效率低下。
DPGrid 利用由摄影中心构建的 Vorinoi 图自动生成拼接线,如彩图 8(见 91 页)所示(十字丝为摄影中心,多边形为由Vorinoi图生成的自动拼接线)。这样不但实现了正射影像拼接线的自动选取,而且数字微分纠正均从离采样点最邻近的影像进行重采样,既提高了正射影像的拼接效率,又保证了正射影像的几何、纹理质量。
5) 海量正射影像图的并行纠正。在完成空三平差解算以后,可以利用密集匹配点和影像的外方位元素生成 DEM,进而可对原始影像进行数字微分纠正,生成正射影像图。
传统数字摄影测量工作站的正射影像图制作是串行、按单模型进行的数字微分纠正,极大地限制了正射影像图的制作效率,远远不能满足海量航空影像的正射影像图快速生成和应急响应的需求,因此必需能对正射影像进行并行纠正。
利用 Vorinoi 图可自动生成拼接线,进而将测区划分为若干采样单元,如彩图 8(见 91 页)所示。彩图 8 中由黄色拼接线形成的多边形区域即为各采样单元。因此,可以利用多个计算节点对正射影像进行并行微分纠正,即根据采样单元创建测区采样任务表,将采样任务分配给每个计算节点进行并行采样(每个采样单元由一个计算节点完成数字微分纠正)。因此,这种自动拼接线和并行数字微分纠正的方法成倍地提高了正射影像纠正的效率。彩图 9(见 91 页)为利用自动拼接线和并行微分纠正生成的正射影像。
6) 数据处理效率。基于以上数据处理方法和技术流程,DPGrid 在 111 h 内完成了 4507 幅 DMC 影像的快速处理和正射影像图的制作,并于 5 月 19 日快速制作出 5 月 15 日飞行的映秀—汶川—茂县 0.3 m 分辨率的正射影像图,为抗震救灾行动提供了及时、可靠的测绘数据。表 2 为 DPGrid 数据处理效率,与传统数字摄影测量工作站相比,其数据处理效率提高了 8 倍以上。
《表2》
表2 DPGrid 数据处理效率(3 台 PC 作为计算节点)
Table2 The DPGrid consuming time of data processing(3 PC as computing nodes)
《4 成果与应用》
4 成果与应用
航空摄影测量不仅能为应急响应快速提供直观、高分辨率的正射影像图,迅速获取灾区详细的地面三维信息与灾情,并能为救援队伍提供精确、可靠的测量数据,从而及时制定出有效的救援计划、进行合理的人员调度。例如,在正射影像图上可量测被毁坏道路、桥梁的长度;在与 DEM 叠加的正射影像图上可测量山体滑坡的面积和土方量;正射影像与等高线叠加不但能直观地了解灾区的地形,并且能为灾后重建工程提供测绘参考;三维景观图不仅能进行三维虚拟漫游,并且可在三维可视化环境下进行三维坐标量测。
以下是 DPGrid 在本次抗震救灾行动中的部分测绘成果与应用。彩图 10(见 92 页)为 5 月 15 日“映秀—汶川—茂县”测区三维点云、DEM 与正射影像图。彩图 11(见 92 页)为 5 月 18 日“绵竹—什邡—安县—北川”北川正射影像图。彩图 12(见 93 页)为北川正射影像图成果与应用。在正射影像图上可以量测堵塞河道的长度(如彩图 12(a)所示),并且将 DEM 与正射影像图叠加还能量测山体滑坡的面积和土方量(彩图 12(b)所示);利用 DEM 可以自动生成等高线矢量图,将等高线与正射影像叠加在一起,不但能直观地了解灾区的地形、地势,并且能为灾后重建工程提供测绘参考(如彩图 12(c)所示)。
利用 DEM 和正射影像图还可生成三维景观图,并能在虚拟环境下进行三维漫游和三维坐标量测,如高程量测、水平距离量测、空间距离量测和面积量测等。图 14 为唐家山堰塞湖三维景观图与三维量测实例。
《图14》
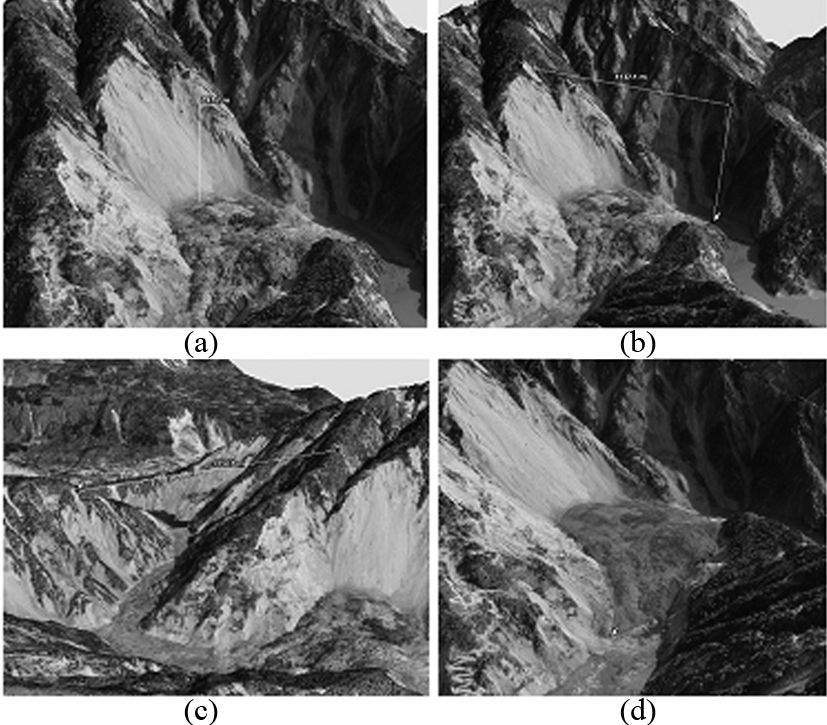
图14 唐家山堰塞湖三维景观图与三维量测
Fig.14 The 3D landscape map and 3D measurement of Tangjia Mountain barrier lake
因此,在灾害发生时,人们可以对灾区进行无接触的测量和三维分析,既减少了外业测量的危险性和作业周期,又能对灾情进行快速、直观的评估,如身临其境。
《5 结语》
5 结语
数字摄影测量网格系统出色地完成了海量航空遥感影像快速处理的任务,为此次抗震救灾行动提供了大量直观、精确和宝贵的测量数据,为救援行动做出了自己应有的贡献。此次任务的成功完成,可得出以下结论:
1) DPGrid 在无 GPS/IMU 等辅助测量参数条件下,可适应大旋偏角立体像对的匹配,并且其稳健的处理算法可处理“转圈”的非常规航空摄影数据,能够在灾害监测等应急响应中发挥显著作用,这在中国航空摄影测量史上还是第一次。
2) POS 数据的引入极大地提高了影像匹配的稳健性和速度,降低了数据处理的难度,使航空摄影测量的空中三角测量和平差解算能够在云层遮挡或落水区域等困难测区得以顺利进行,保障了平差解算的精度和可靠性。
3) 基于分布式计算的航空摄影测量数据处理平台改变了已有的传统作业方法,它将计算机网络技术、并行处理技术、高性能计算技术与数字摄影测量处理技术相结合,并在关键算法和数据处理机制上提高了计算的稳健性和效率,使数据处理效率比传统数字摄影测量工作站提高了 8 倍以上。
DPGrid 在抗震救灾中的成功应用,在国内外属于首次,起到了意想不到的效果。在北京 2008 年第 21 届国际摄影测量与遥感会议产品展览期间,DPGrid 在抗震救灾行动中发挥的显著作用和相关测绘成果受到了国内外摄影测量专家的一致赞赏。与此同时,进一步系统地完善航空摄影测量应急响应体系,并能将其纳入国家抗震救灾等应急响应机制,将是下一步工作的重点,也是测绘工作者们义不容辞的责任与义务。











 京公网安备 11010502051620号
京公网安备 11010502051620号




