
《1 前言》
1 前言
模块化海上平台是指由一定规格尺寸的浮箱元以一定形式拼接而成的海上浮式结构,通常可以构成浮游栈桥、驳运门桥、浮游码头,海洋勘探平台、海上火箭发射平台等海上结构物,以满足不同需求,为海洋资源的开发利用提供强有力的保障。
模块化海上平台作为一种特殊的拼组式的多浮体结构,模块之间的连接器是整个结构系统中的一个关键环节。模块化海上施工平台可根据不同需要拼组成多种浮式结构,结构不同,连接器的研究方法也不尽相同。在众多的结构中,驳运门桥是一种最为典型的结构形式,驳运门桥不但自身可以承担任务,而且是拼装其他浮游结构物的基本单元。因此,文章研究中以驳运门桥这一典型的浮式结构为研究对象。重点研究驳运门桥连接器的动力响应问题。
《2 计算方法》
2 计算方法
在多浮体理论研究中,根据模块与连接器的不同假设可分为 3 种:刚性模块刚性连接器(rigid module rigid connector);刚性模块柔性连接器(rigid module flexible connector);弹性模块柔性连接器(flexible module flexible connector)。对驳运门桥而言,其单模块尺寸为 12.91 m ×7.32 m ×1.8 m,拼组成的最大结构尺寸也仅为 60.95 m ×7.32 m ×1.8 m,与传统浮体结构的尺寸相当,因而数值计算中可采用刚性模块刚性连接器的假设,即将通过连接器拼装成的驳运门桥看成一个连续的刚体,而连接器的载荷就等同于连接器位置处剖面上的载荷。这样问题就转化为研究浮体特定剖面上的载荷响应。
同时,驳运门桥在使用中都是有一定航速的(可以自带动力,也可借助外力如拖船等),因而数值计算中该问题属于有航速浮体在波浪中的摇荡问题。由于有航速频域格林函数计算的复杂性以及积分方程中水线积分项难以处理,使得该问题的求解十分困难,为此,引入了“高频低速”的假设,利用无航速格林函数加上关于航速的修正项来研究浮体在波浪中的航行问题。
《2.1 有航速速度势的定解条件》
2.1 有航速速度势的定解条件
考虑任意三维刚性物体飘浮于静水自由面上,为方便表述流场中速度势的边界条件,将浮体处于平衡位置时的湿面(平均湿表面,即物面)记为 S ,未受扰动时的静水面(平均自由表面)记为 F ,底部边界条件记为 B ,远方条件记为 R ,如图 1 所示。由浮体平均湿表面 S 、自由面 F 、底部边界 B 和远方控制面 R 包围的流体区域,正是定解问题的研究对象。规定流场边界面上的法线以指向域外为正,对于浮体湿面,即是指向浮体内部为正。 假定浮体仅作微幅运动,则自由面条件和物面条件可以线性化,在各自的平均位置上表述。
《图1》
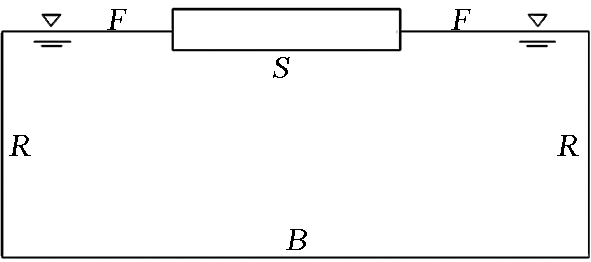
图1 流场边界的定义
Fig.1 Definition of fluid boundaries
非定常速度势 Φt 中的入射波速度势 φI 是已知的,绕射波速度势 φD 和辐射波速度势 φr 是未知的。有航速时辐射势满足的定解条件为[1]:
域内条件【L 】:  = 0
= 0
线性自由面条件【F 】:

平均湿表面条件【S 】:

底部边界条件【B 】:
远方条件【R 】: = 0
= 0
式(1)中, n 为浮体表面单位矢量(指向物体内部);r 为相对重心 G 的矢径; n =(n1 ,n2 ,n3 );r × n =(n4 ,n5 ,n6 );(m1 ,m2 ,m3 ) = 0 ; (m4 ,m5 ,m6 ) =(0,n3 ,- n2);  ;波数 k =ω2/g ;遭遇频率 ωe =ω-kU cosβ 。
;波数 k =ω2/g ;遭遇频率 ωe =ω-kU cosβ 。
式(1)构成了频域内有航速浮体运动流场辐射速度势应满足的完整的定解条件。当前,对该问题的求解还未完善。 由于有航速问题的复杂性,为简化问题,一些学者引入了低航速假定,利用无航速格林函数或加上关于航速的修正项来研究浮体在波浪中的航行问题。其中 Papanikolaou 和 Schellin[2]做了大量研究工作,提出了“高频低速”的假设,并得到了推广[3]。
所谓“高频低速”假设是指,在波浪频率比较高而浮体航速较低的情况下,可以认为 ,对驳运门桥而言,结构在使用中自身对航速要求就不高,再加上箱体的流线型很差,同时,驳运门桥的使用环境中波浪的频率都较高。 因而满足“高频低速”条件。此时,
,对驳运门桥而言,结构在使用中自身对航速要求就不高,再加上箱体的流线型很差,同时,驳运门桥的使用环境中波浪的频率都较高。 因而满足“高频低速”条件。此时, 。自由面条件可简化为:
。自由面条件可简化为:
线性自由面条件【F 】:

式(2)表明,在满足“高频低速”假设的情况下,有航速时的速度势与无航速时的速度势形式完全相同,只需要用遭遇频率 ωe 代替自然频率 ω。
同理,对浮体湿表面条件也可作类似转化。
平均湿表面条件【S 】:

考虑到 mj 和 nj 的关系,若定义无航速辐射速度势 在物面上满足:
在物面上满足:

其他定解条件与 φr 相同,则 φr 均可由 表示:
可见,在“高频低速”的假设下,有航速速度势的求解可转化为无航速问题,从而可以借用无航速频域格林函数建立分布源密度方程,求解辐射势和绕射势。
《2.2 浮体在波浪中的运动方程》
2.2 浮体在波浪中的运动方程
对形状为对称性的浮体,频域中的运动方程在 6 个自由度上并不完全是耦合的。其中纵荡、垂荡和纵摇构成一组耦合的方程组;横荡、横摇和首摇构成一组耦合的方程组。对于细长的浮体,又可把纵荡与纵摇和垂荡分离开来。 于是有:
纵荡运动方程:

垂荡和纵摇耦合运动方程组:
横荡、横摇和首摇耦合运动方程组:

《2.3 浮体剖面载荷响应》
2.3 浮体剖面载荷响应
2.3.1 部分长度浮体上刚体惯性力载荷取单位长度的浮体,设其质量为 m(x) ,质心坐标为 (x,yx ,zx )(坐标系 3),该质量关于坐标轴 ox,oy,oz 的惯性矩分别为 Ix ,Iy ,Iz (其中 o′ 为 Gxb 轴与该船体横剖面的交点)。 该质量的刚体惯性力载荷可记作:

根据刚体动力学可知:
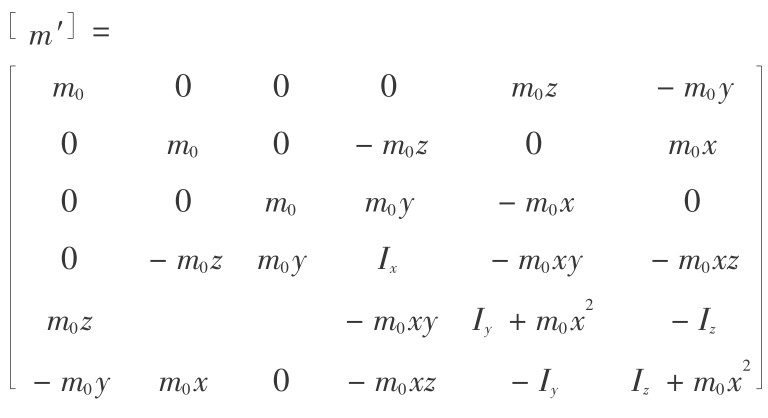

考察从浮体艉部 (x =xI) 到任意剖面 x 处的部分长度浮体,其刚体惯性力载荷为:

则有:

显然,浮体艏部(x =xf ) 对应的 [ M ′ ] 就是[ M ]。实际计算时,可近似的取 yx =yz =0 及 Iyz =0
2.3.2 浮体横剖面内的力和力矩
仍然以从浮体艉部到任意剖面处的部分长度浮体为研究对象。部分长度浮体横剖面载荷如图 2 所示。
《图2》
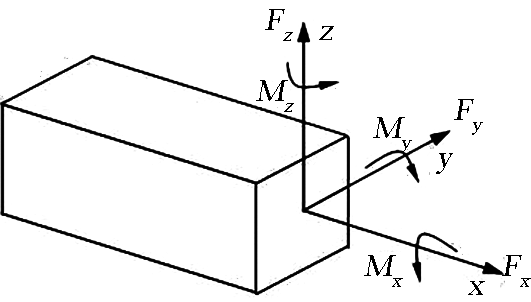
图2 浮体剖面载荷
Fig.2 The section loads of the floating structures
记浮体剖面 x 内的力和矩为: ,其包括了 3 个应力(沿 x,y,z 方向的剪力)和 3 个弯矩(绕x,y,z 轴的弯矩),共计 6 个分量。
,其包括了 3 个应力(沿 x,y,z 方向的剪力)和 3 个弯矩(绕x,y,z 轴的弯矩),共计 6 个分量。
根据达朗贝尔原理,作用于部分长度浮体上的真实载荷及刚体惯性力载荷与剖面载荷相平衡,得:


式(13)中, Sx 为部分长度浮体的湿表面; p 为总的脉动压力。 剪力 Fx 和 Fy 需要除去由于浮体摇荡运动产生的浮体重力在动坐标系中的分量;而扭矩需要转移到浮体剖面剪切中心上;弯矩 My 和 Mz 需要除去垂向和水平剪力产生的弯矩分量。 因此,最终的剖面载荷为:
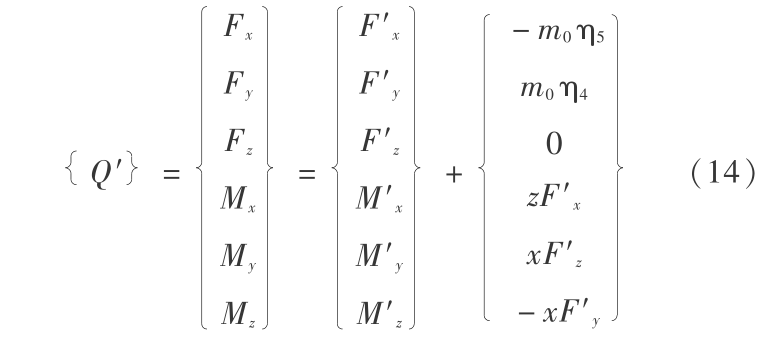
式(14)中, Fx 为轴向剪力; Fy 为水平剪力; Fz 为垂向剪力; Mx 为轴向弯矩; My 为纵向弯矩; Mz 为水平弯矩。
《3 连接器载荷的数值计算》
3 连接器载荷的数值计算
《3.1 计算模型的描述》
3.1 计算模型的描述
组成驳运门桥的单个浮箱模块主尺度为12.19 m ×2.44 m ×1.8 m,其平面尺度与国际标准化组织(ISO)40 ft(1 ft =0.304 8 m)标准集装箱尺寸相匹配,高度略低,以便于系统在输运及装卸载过程中利用集装箱运输及装卸载设备,提高作业效率。驳运门桥通用结构主尺度为 36.57 m ×7.32 m ×1.8 m,即由 9 个浮箱模块按 3 ×3 的形式拼装而成。特殊情况下,也可由 15 个浮箱模块按 3 ×5 的结构形式拼装成 60.95 m ×7.32 m ×1.8 m 的结构。
驳运门桥拼组作业可分为两步:第一步为浮箱模块横向拼装,横向拼装是将每三个浮箱作为一组,并进行横向连接拼装成结构主尺度为 12.19 m ×7.32 m ×1.8 m 的门桥单元(见图 3)。 横向拼装通常在码头上进行(在海上运输时每个门桥单元要占用 3 个标准集装箱的位置),也可以在集装箱船上进行(需要设置特殊的拼装平台)。横向拼装完成后,就可以借助集装箱船将单元运送到指定海域,准备进一步拼装。
《图3》

图3 驳运门桥单元示意图
Fig.3 The unit of the lightering bridge
第二步是门桥单元纵向拼装,即将横向拼装成的结构单元进行纵向连接,最终拼装成结构主尺度为 36.57 m ×7.32 m ×1.8 m 的驳运门桥(见图 4)。纵向拼装通常在海上进行,海况一般在 3 级以下。拼装而成的驳运门桥的使用海况一般在 5 级以下,高于 5 级海况通常需要分解驳运门桥。
《图4》
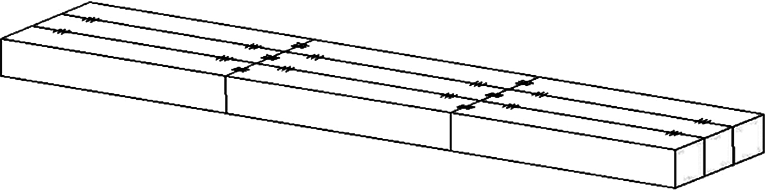
图4 驳运门桥示意图
Fig.4 The lightering bridge
同时,由于驳运门桥为一细长体结构,实际使用中,横向连接器承受的载荷要比纵向连接器小得多,因此,文章将重点研究纵向连接器的动力响应[4]。由此驳运门桥的计算模型可以进一步简化成 12.19 m ×7.32 m ×1.8 m 的单元直接纵向拼装,如图 5 所示。
《图5》
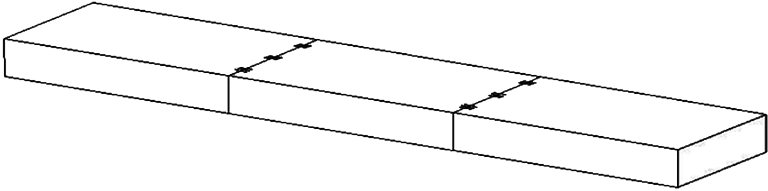
图5 驳运门桥计算模型
Fig.5 The calculating model of the lightering bridge
为描述方便,用 n ×1 表示具体的拼装结构。如: 2 ×1 表示 2 个模块纵向拼装成 24.38 m ×7.32 m ×1.8 m 的结构; 5 ×1 表示 5 个模块纵向拼装成 60.95 m ×7.32 m ×1.8 m 的结构。
《3.2 坐标系的定义》
3.2 坐标系的定义
为定义和计算登陆栈桥系统的运动和连接器的载荷,建立了登陆栈桥系统的坐标系,如图 6 所示。坐标系的原点 O 位于整体结构的重心处, x 轴正方向从尾指向首, y 轴正方向指向左侧, z 轴垂直向上为正,坐标满足右手定则。
《图6》

图6 整体坐标系
Fig.6 Global coordinate system
被连接的各模块分别用 M 1 ~M 5 表示,连接器用 C 1 ~C 8 表示,连接模块 M 1 和 M 2 之间的连接器为 C 1 和 C 2 ,以此类推,模块 M 4 和 M 5 之间的连接器为 C 7 和 C 8 。
由刚性模块刚性连接器(RMRC)模型的假定,各连接器的载荷也就是连接器所在位置剖面处的载荷[5]。在整体坐标系下,连接器的载荷就是在 x =m (m 为常数)处的剖面载荷。 连接器承受的载荷定义如图 7 所示。其中: Fx ,Fy ,FZ 为沿坐标轴方向上的应力, Mx ,My ,Mz 为绕 3 个坐标轴的弯矩。
《图7》
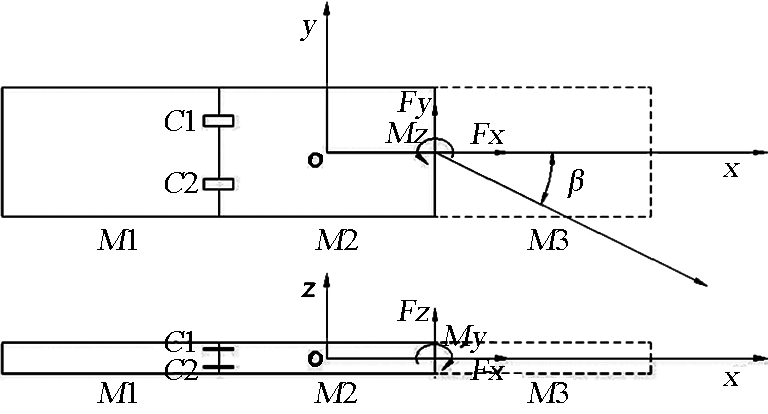
图7 连接器载荷及浪向角的定义
Fig.7 Definition of connector loads and wave direction
在连接器结构设计中,其极限载荷是需要关心的问题[6]。由于登陆栈桥系统特殊的结构形式——细长体结构,在相同的条件下,应力的最大值为 F∞ =Fz ,而弯矩的最大值为 M∞ =My 。因此,为减少不必要的工作量,结合登陆栈桥系统特殊的结构形式,文章在连接器的载荷计算中主要计算以上两个极限载荷。
《3.3 网格划分》
3.3 网格划分
为计算结构的水动力,首先要对结构的湿表面进行网格划分。网格划分是整个数值计算中一个非常重要的环节,网格划分的好坏将直接决定计算的成功与否。网格划分得过粗,就不能保证计算的精度,而网格划分得过细,又会人为增加不必要的计算时间。为在两者间找到一个较好的平衡点,笔者等进行了多次试算,最终确定采用四边形单元,单元尺寸为 0.6 m ×0.6 m 。按这一标准,可将 1 ×1 结构(即单模块)的湿表面划分为 368 个四边形单元和 477 个节点,如图8 所示;将 3 ×1 结构的湿表面划分为 1 008 个四边形单元和 1 237 个节点,如图9 所示。
《图8》
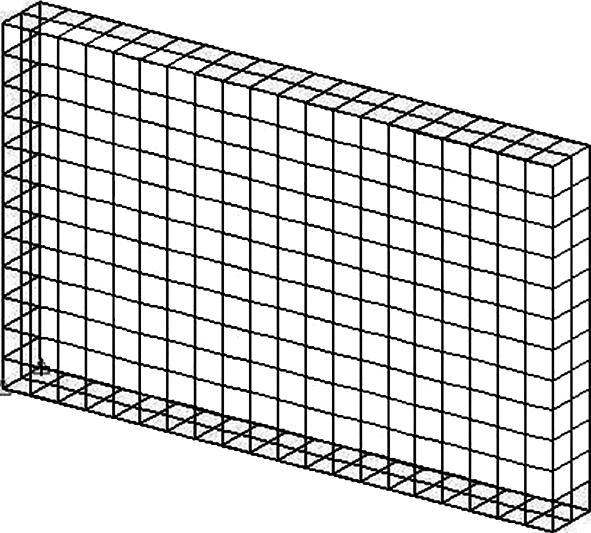
图8 1 ×1 单模块湿表面网格划分
Fig.8 Subdivided immersed surface for 1 ×1 platform
《图9》
图9 3 ×1 单模块湿表面网格划分
Fig.9 Subdivided immersed surface for 3 ×1 platform
《3.4 海况选择》
3.4 海况选择
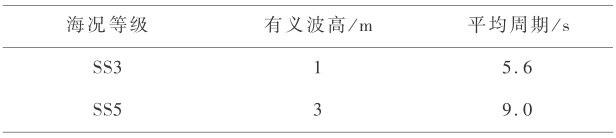
考虑到登陆栈桥系统特殊的使用环境,选择系统连接海况为 3 级海况,系统连接成功后的生存海况为 5 级海况,各海况的统计值如表 1 所示[7]。
《表1》
表1 海况的统计
Table 1 Date of the sea state
《3.5 计算结果与分析》
3.5 计算结果与分析
根据所述的理论,计算了不同结构尺寸、不同海况、不同浪向角条件下驳运门桥连接器的载荷。为便于比较,对单数模块拼组的结构( 3 ×1 和 5 ×1 ),还计算了其中间剖面的载荷,即 x =0 处的载荷响应。部分运动响应曲线如图 10 至图 17 所示。
《图10》
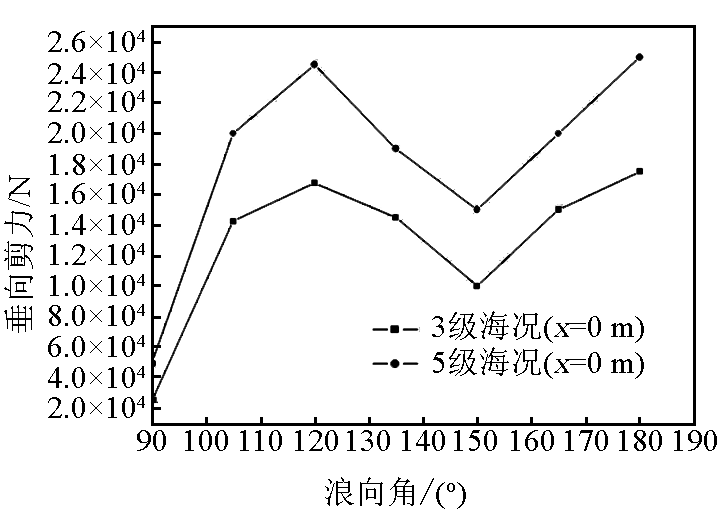
图10 连接器垂向剪力 Fz (2 ×1 模型)
Fig.10 Connector shearing force Fz (2 ×1 model)
《图11》
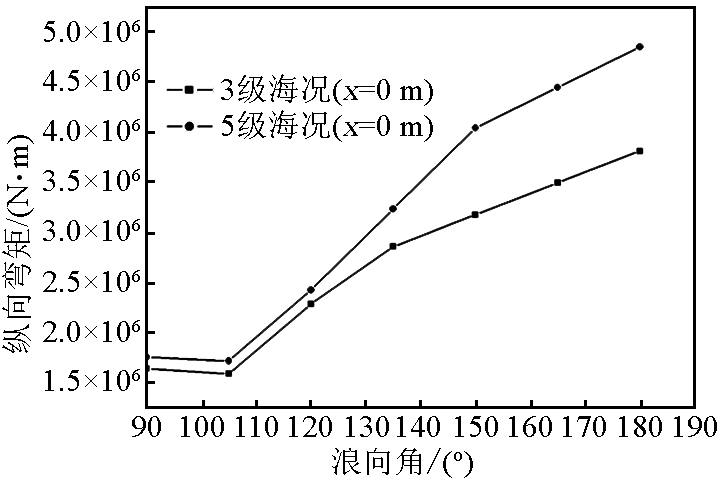
图11 连接器纵向弯矩 My (2 ×1 模型)
Fig.11 Connector bending moment My (2 ×1 model)
《图12》
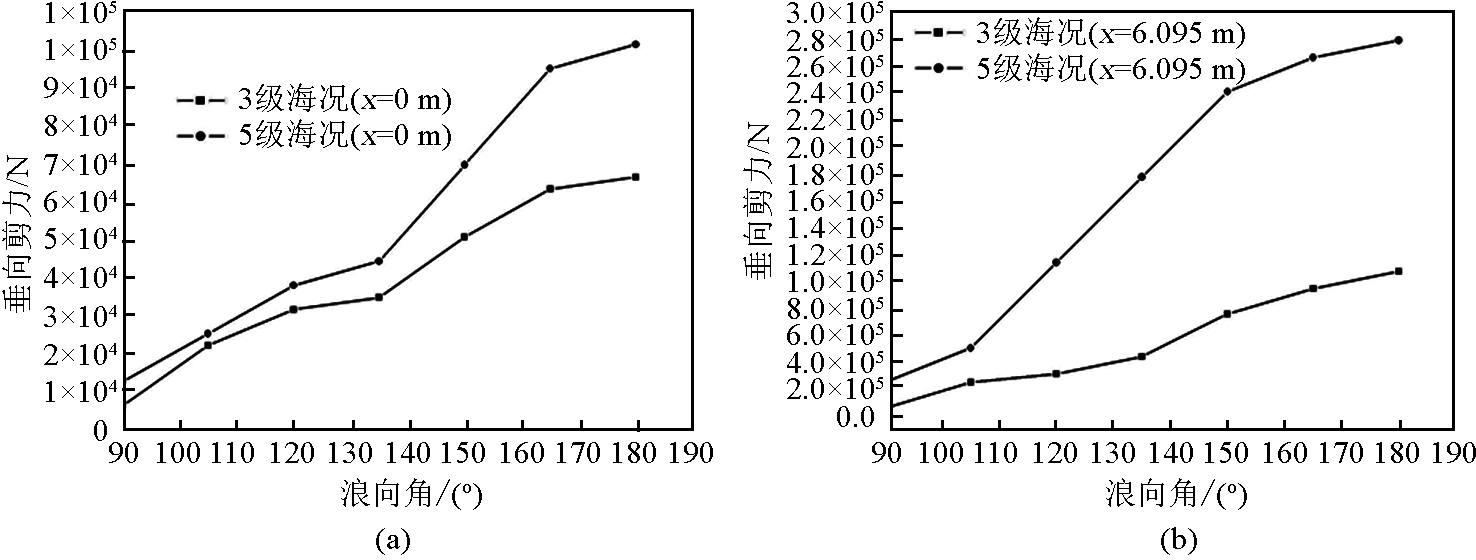
图12 连接器垂向载荷 Fz (3 ×1 模型)
Fig.12 Connector shearing force Fz (3 ×1 model)
《图13》
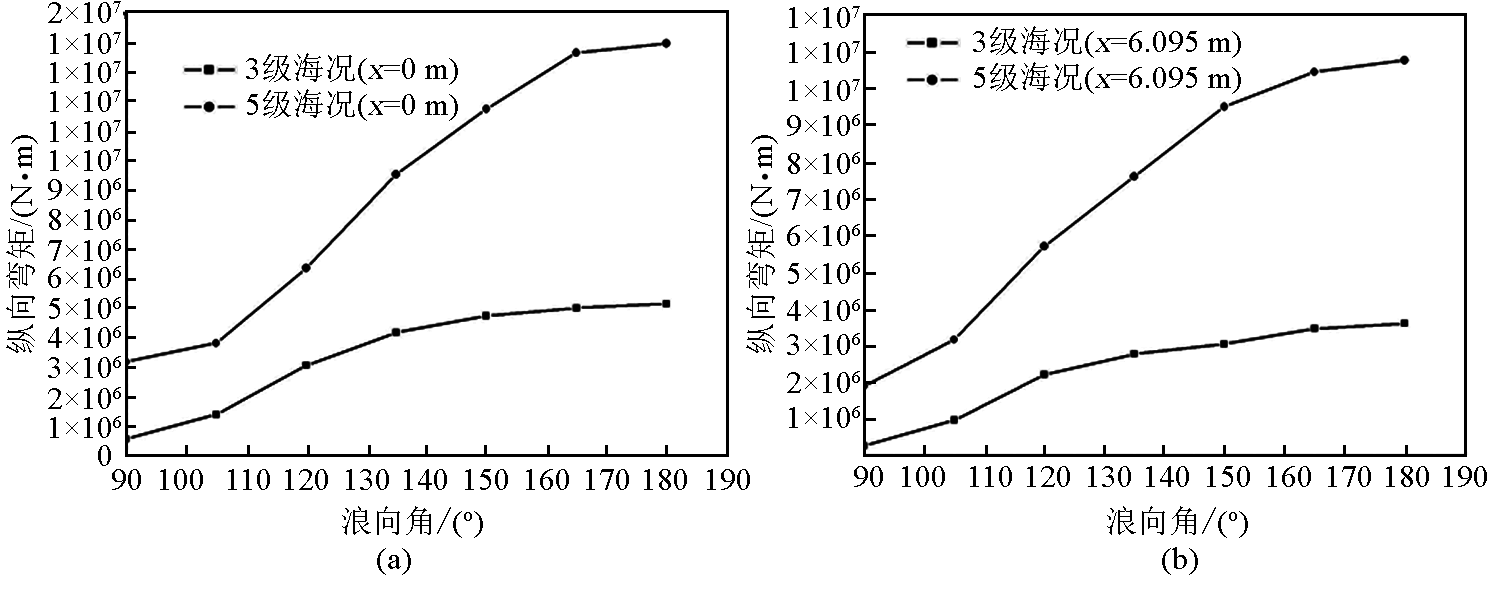
图13 连接器纵向弯矩 My (3 ×1 模型)
Fig.13 Connector bending moment My (3 ×1 model)
《图14》
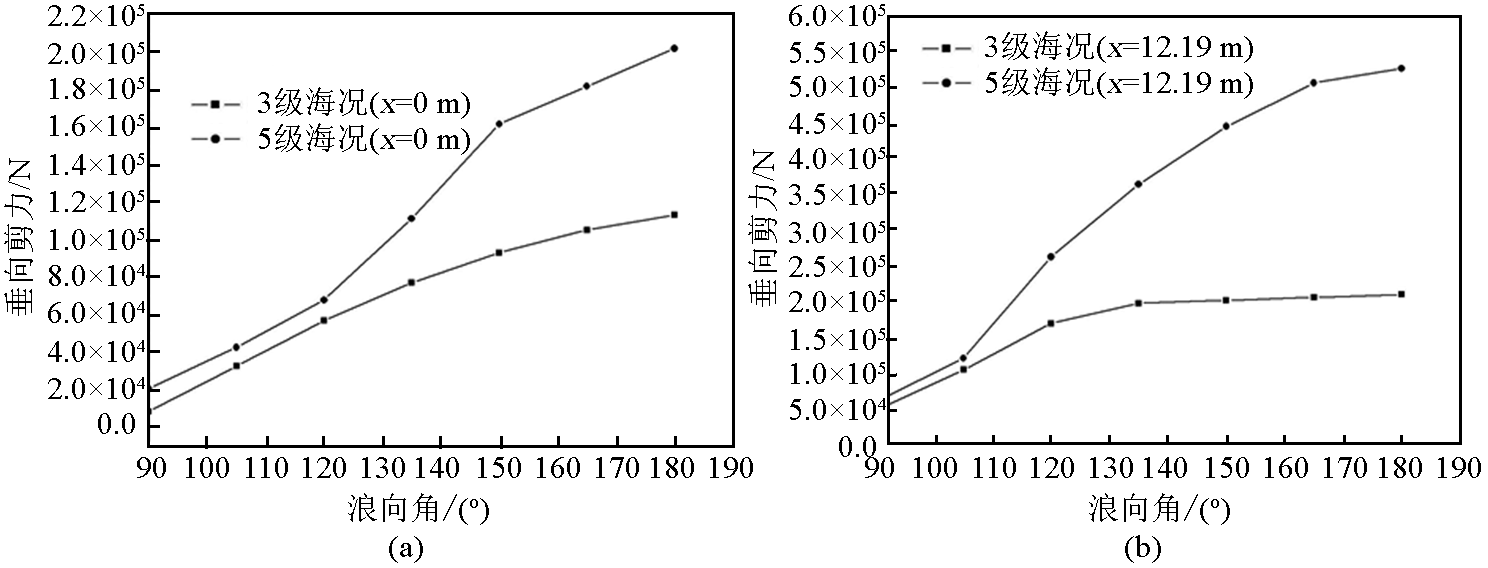
图14 连接器垂向剪力 Fz (4 ×1 模型)
Fig.14 Connector shearing force Fz (4 ×1 model)
《图15》
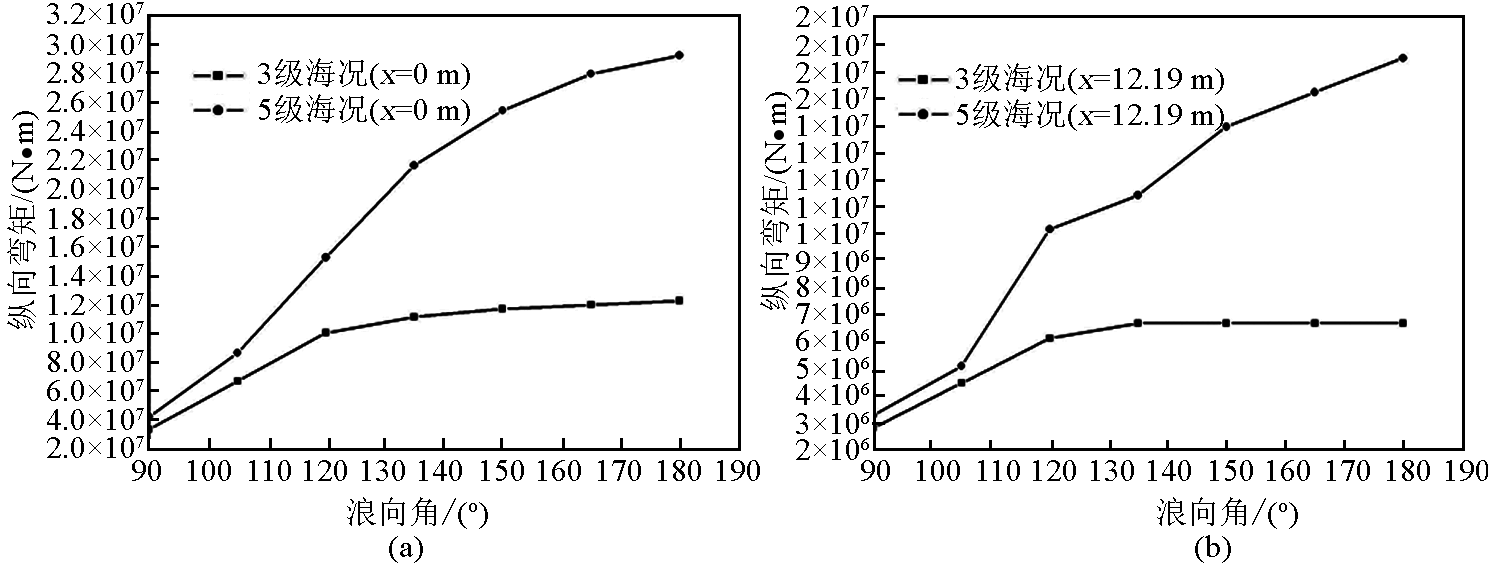
图15 连接器纵向弯矩 My (4 ×1 模型)
Fig.15 Connector bending moment My (4 ×1 model)
《图16》

图16 连接器垂向剪力 Fz (5 ×1 模型)
Fig.16 Connector shearing force Fz (5 ×1 model)
《图17》
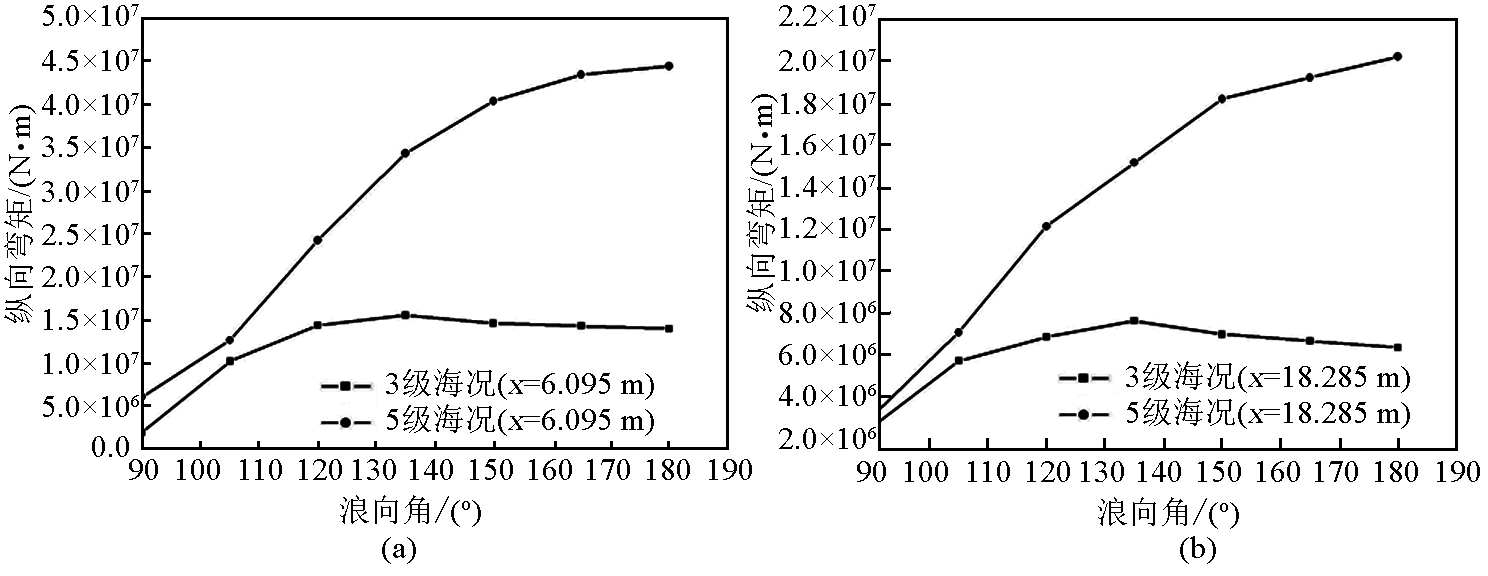
图17 连接器纵向弯矩 My (5 ×1 模型)
Fig.17 Connector bending moment My (5 ×1 model)
从图 10 至图 17 中可以看出:
1)驳运门桥结构尺寸越大,连接器的极限载荷 Fz 和 My 的值也越大,这与实际情况相符。 同时, Fz 和 My 都随浪向角的增加而增大,两者都在迎浪( β=180°)时达到最大值。
2)极限应力 Fz 并不是发生在 x =0 的剖面处,而是位于结构的边缘处。分析原因,与结构纵摇运动时产生的作用在结构边缘处较大的动水压力有关。而极限弯矩 My 发生在 x =0 的剖面处,这也与实际相符,基于此,登陆栈桥系统在实际使用中,应尽可能采用单数模块拼装,以避免连接器承受较大的弯矩。
3)海况对连接器载荷的影响极为明显。相同条件下,5 级海况下连接器载荷要比 3 级海况下的载荷大几倍,甚至一个数量级。因此,为避免出现过大的连接器载荷而造成整体结构的破坏,登陆栈桥系统在实际使用中,应要求系统在超过 5 级海况时要脱开连接器,将结构分解。同时,在连接器的结构设计中要充分考虑高海况下脱开连接器的特殊性,此时,仅借助人力是不现实的,一般需要借助动力或便携式动力装置来提高作业效率。
《4 结语》
4 结语
模块化海上平台特殊的结构形式、使用环境及其使用要求,对现有的分析、计算、设计建造技术提出了新的挑战。对模块化海上平台而言,连接器不仅是其结构上的薄弱环节,而且决定了整个结构适应海况的能力,因而,在模块化海上平台设计的一系列关键问题中,连接器的结构优化设计及其动力响应研究成为重中之重,针对这一核心问题,文章采用RMRC 模型对模块化海上平台连接器的动力特性进行了研究,得出了一些有益的结论,为模块化海上平台连接器的设计及使用提供了有益的借鉴。











 京公网安备 11010502051620号
京公网安备 11010502051620号




