2003年 第5卷 第8期
非线性系统高阶微分反馈控制
1.天津科技大学自动化系,天津 300222
2.南开大学自动化系,天津 300071
下一篇 上一篇
摘要
提出了不依赖系统模型的高阶微分反馈控制思想,控制目标是系统输出及其微分和高阶微分逼近设定输入及其微分和高阶微分,极大地提高了对控制品质要求。基于这种思想设计了能高品质地提取量测信号的微分和高阶微分的高阶微分器(HOD, high order differentiator),该HOD参数少,容易调节,并给出其稳定性、收敛性和滤波特性的证明;另外,对带有未知扰动、模型未知的非线性SISO和MIMO系统分别设计了基于HOD的高阶微分反馈自适应控制器(HODFC, high order differentials feedback adaptive controller),给出了闭环系统稳定性和鲁棒性分析,并且实现了线性化解耦控制。
图片
图1
图2
图3
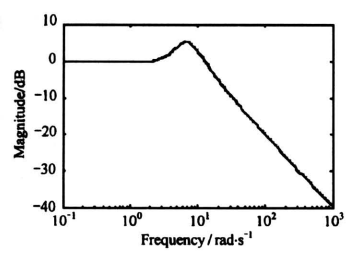
图4
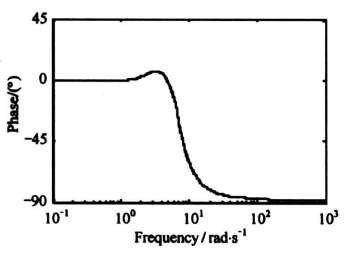
图5
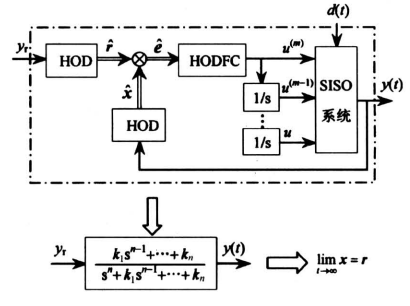
图6
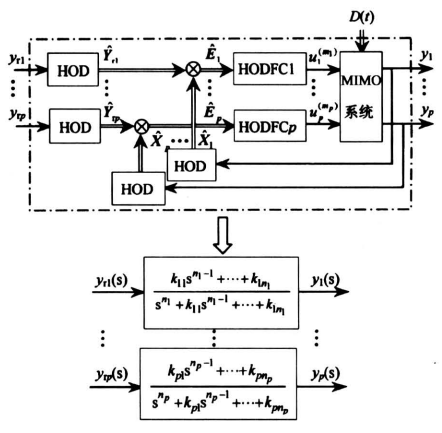
图7

图8
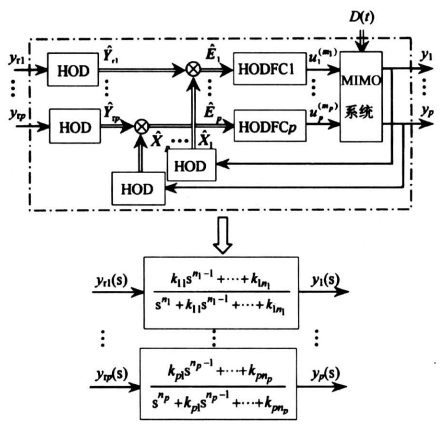
图9
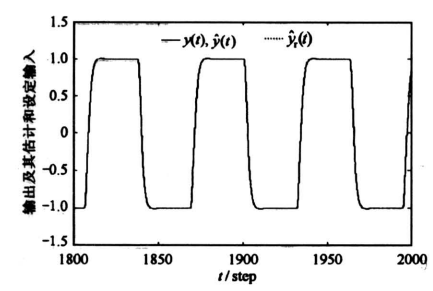
图10
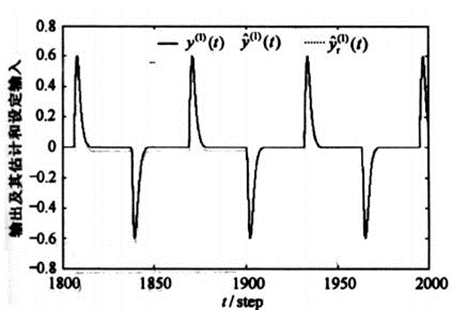
图11
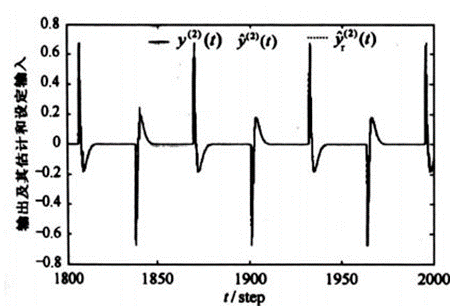
图12
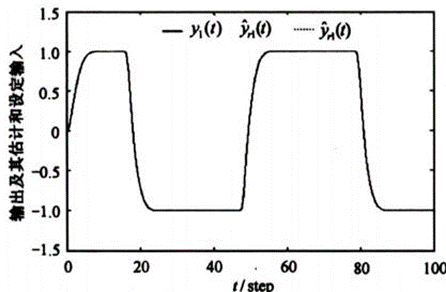
图13

图14
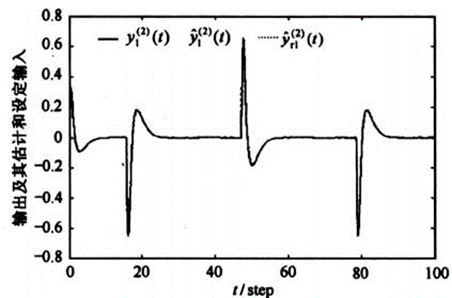
图15

图16
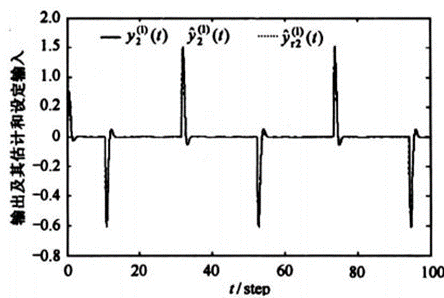
图17
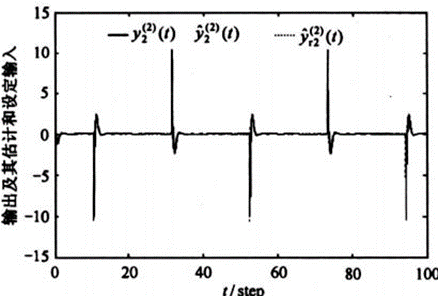
图18
参考文献
[ 1 ] 王伟,张晶涛,柴天佑.PID参数先进整定方法综述[J].自动化学报,2000,26(3):347~355
[ 2 ] 韩京 清.非线性PID控制器[J].自动化学报,1994,20(4):487~490
[ 3 ] Åuström K J,Hägglund T.Automatic tuning of PID controllers[M]. Research Triangle Park,North Carolina:Instrument Society of America,1988
[ 4 ] Åuström K J, Hägglund T. PID controllers:theory, design,and tuning,2nd Edition[M].Research Triangle Park,North Carolina:Instrument Society of America.1995
[ 5 ] Esfandiari F, Khalil H K. Output feedback stabilization of fully linearizable systems[J].Int J Contr,1992,56:1007~1037
[ 6 ] Teel A,Praly L. Global stabilizability and observability imply semi-global stabilizabilty by outputfeedback[J]. Syst Contr Lett,1994,22:313~325
[ 7 ] Khalil H K. Adaptive output feedback control of nonlinear systems represented by input-output models [J].IEEE Trans Auto Contr,1996,41(2):177~ 188











 京公网安备 11010502051620号
京公网安备 11010502051620号




