2007年 第9卷 第8期
航海船舶多维振动主动控制研究
江苏大学机械工程学院,江苏镇江212013
下一篇 上一篇
摘要
采用基于并联机构和电磁作动器的多维振动主动控制装置,实现了对船舶航行中面临的多维低频振动衰减。对振动控制装置进行了结构设计、系统控制模型分析和控制算法研究,并制作样机进行了实验研究。样机试验结果表明,该多维减振装置能够实现船舶多维低频振动主动控制。
图片

图 1

图 2

图 3
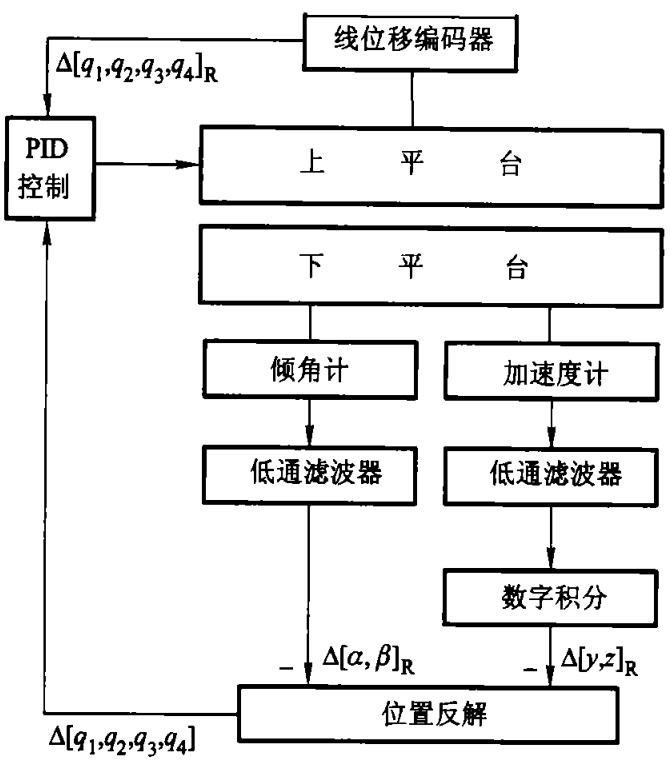
图 4

图 5
图 6
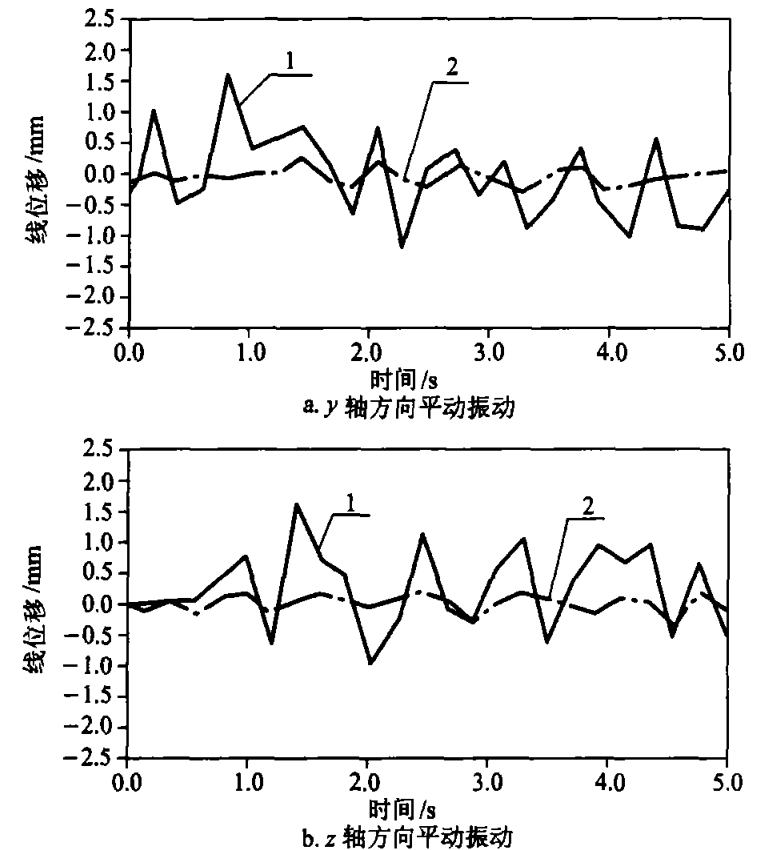
图 7
参考文献
[ 1 ] Griffin M J.Handbook of Human Vibration[M].London:The University Southampton,Academic Press Limited,1990
[ 2 ] 马覆中,尹小琴,杨启志,等,多维减振平台主体机构的分析研究[J].江苏大学学报(自然科学版),2004,25 4):281-284 链接1
[ 3 ] 杨廷力,机器人机构拓扑结构学[M].北京:机械工业出版社,2004
[ 4 ] 黄真,孔令富,方跃法,并联机器人机构学理论及控制[M].北京:机械工业出版社,1997
[ 5 ] 欧珠光工程振动[M].武汉:武汉大学出版社,2003
[ 6 ] 欧进萍,结构振动控制[M].北京:科学出版社,2003
[ 7 ] 汪光森,等,基于DSP和PWM技术的电磁悬浮隔振系统[J].振动、测试与诊断,2002,22):11 11111 链接1
[ 8 ] 李翔晟,电磁阻尼悬架的主动控制与仿真[J].农业机械学报,2004,3(2):13-16 链接1
[ 9 ] 李德葆,陆秋海,工程振动试验分析[M].北京:清华大学出版社,2004











 京公网安备 11010502051620号
京公网安备 11010502051620号




