

《1 引言》
1 引言
根据滚动轴承在线振动信号监测其运行状态和实时进行故障诊断, 是目前既普遍又行之有效的方法
滚动轴承故障模式识别的任务就是对其振动信号中包含的状态信息进行提取和处理并加以分类, 从而推断出滚动轴承运行的状态。由于滚动轴承系统的复杂性和故障形式的多样性, 振动信号和状态信息之间并不存在确定的函数关系, 信号集与状态集之间是一个复杂的非线性映射。这就决定了滚动轴承故障模式识别的难度和复杂性。
人工神经网络理论为描述这种映射关系提供了有效的工具。它通过对各种标准信号的处理和标准样本的学习, 可以将处理和学习过程以权值和阈值模式集中存储和记忆在网络中, 这样就可以通过网络的联想能力实现从信号空间到状态空间的非线性映射, 从而达到模式识别的目的。
笔者首先对滚动轴承振动信号在时域中建模, 将振动信号转化为时序模型参数, 以减小输入欧式空间的维数, 然后利用径向基函数网络完成P维欧式空间到Q维欧式空间的非线性映射, 从而达到对滚动轴承故障状态进行模式识别的目的。
《图1》

图1 3种工况轴承振动信号 Fig.1 Vibration signals of bearing under three operating conditions
《2 轴承振动信号的自回归AR (P) 建模》
2 轴承振动信号的自回归AR (P) 建模
将轴承振动信号通过时序分析方法建立如下的AR (P) 模型
式中w (n) 是均值为零, 方差为σ
理论上已证明
由于时序模型的系数ai (i=1, 2, …, P) 浓缩了原时间序列信号的全部信息, 因而可以通过对其系数的研究达到故障模式状态识别的目的。
笔者采用最小二乘原则估计AR (P) 模型参数。
考虑理想的AR (P0) 模型是
x (n) 的P阶线性预测器是
相应的预测误差序列是
误差平方和是
当εP为最小时可得到估计
《3 径向基函数 (RBF) 网络》
3 径向基函数 (RBF) 网络
径向基函数网络是以函数逼近理论为基础而构造的一类前向网络, 这类网络的学习等价于在多维空间中寻找训练数据的最佳拟合平面。近年来的研究表明
RBF网络的输出为
由于Guassian函数的良好性能, 笔者采用Guassian函数作为径向基函数:
由Guassian核函数可看出, 它具有两个矢量参数x和c, 其中x是函数的自变量矢量, 是输入, c是常数矢量, 是径向基函数的中心。x-c构成了一个以c为中心的超椭圆, Φ (x - c) 就是径向基函数。
径向基函数网络算法如下
Guassian函数网络的学习参数有3个, 即各RBF的中心ck、方差σk以及输出单元的权值Wk。
步骤1 从输入向量中选一组初始中心值ck , 注意ck的值要不同。
步骤2 计算方差值:
式中 dmax为最大的Eucilidean距离;K为ck的数量。
步骤3 初始化输出单位权。
步骤4 由给定的输入x (n) 计算输出
步骤5 更新RBF网络参数:
式中:
步骤6 如网络收敛, 则计算停止, 否则转到步骤4。
《4 RBF网络诊断方法》
4 RBF网络诊断方法
鉴于时序AR模型分析方法在状态特征信息提取上的优势和RBF网络的优点, 可以将两者有机地结合起来, 在时序模型基础上建立径向基神经网络的滚动轴承故障模式的识别模型, 如图2所示。
《图2》
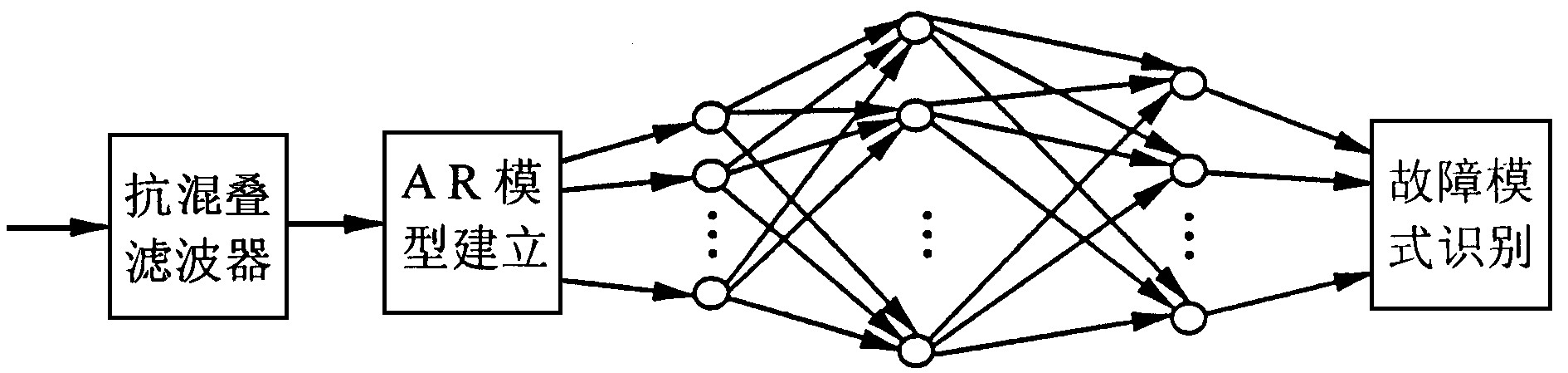
图2 滚动轴承故障模式识别网络模型 Fig.2 Recognizing network model of fault pattern of rolling bearing
由图2可见, RBF神经网络由输入层、输出层和隐层组成, 每层包含若干神经元。采集到的滚动轴承振动数据, 经过抗混叠滤波的预处理, 建立AR模型, 得到时序模型的特征向量
《5 RBF网络应用于轴承故障模式识别》
5 RBF网络应用于轴承故障模式识别
对310型轴承的正常状态、外环故障状态和内环故障状态3种工况进行检测, 典型时域波形如图1所示。试验中共取36个轴承, 其中正常轴承、外环故障轴承、内环故障轴承各12个, 每个轴承采样5次, 每次取1 024个数据。用于训练网络的正常轴承7个, 外环故障轴承9个, 内环故障轴承8个, 其余被用于训练后网络的验证。
RBF网络输入为AR模型的特征向量20个, 隐层神经元个数为20, 输出层含3个节点 (正常、外环故障、内环故障) 。在训练精度为0.5 %的情况下, 用正常状态数据25组, 外环故障状态数据20组, 内环故障状态数据20组对RBF网络进行训练, 得到系统的网络模型。用其余的轴承数据对网络进行验证, 表1为部分典型RBF网络训练和识别结果数据, 表2、表3、表4为训练样本数量与正确识别率的结果。
从表2、表3、表4可看出, 在试验中当训练样本的数量正常状态少于12, 外环故障状态少于14, 内环故障状态少于12时, 正确识别率低于70 %;当训练样本数量正常状态大于32, 外环故障状态大于30, 内环故障状态大于33时, 正确识别率低于70 %;当训练样本数量正常状态在22~27, 外环故障状态在16~26, 内环故障状态在18~24时, 正确识别率可达90 %以上。可见, RBF神经网络对于一定的复杂度和训练集规模而言, 确定有一最佳适中值
表1 部分RBF网络训练和识别结果数据 Table 1 Part data of RBF net training and recognizing results
《表1》
| 系数 | 310型试验轴承12组AR (20) 模型系数 | |||||||||||
| 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | 11 | 12 | |
| a1 | -0.045 0 | 0.175 6 | 0.645 1 | 0.045 5 | 0.371 1 | -0.427 9 | 0.642 1 | 0.460 7 | -0.144 2 | -0.241 0 | -0.228 8 | 0.964 7 |
| a2 | -0.068 1 | -0.276 5 | 0.088 4 | 0.153 1 | 0.390 4 | 0.946 2 | 0.669 8 | 0.612 9 | 1.079 7 | 0.889 5 | 0.973 5 | 0.320 3 |
| a3 | 0.091 9 | -0.097 9 | -0.078 0 | 0.006 1 | -0.090 5 | -0.994 4 | -0.298 5 | 0.040 3 | -0.028 2 | -0.110 5 | 0.101 6 | 0.061 4 |
| a4 | -0.012 2 | 0.056 4 | -0.174 7 | 0.099 2 | 0.463 0 | 1.248 9 | -0.215 6 | 0.308 2 | 0.606 8 | 0.270 2 | 0.338 6 | 0.093 6 |
| a5 | -0.001 7 | 0.183 9 | -0.127 9 | -0.022 8 | 0.061 4 | -1.165 0 | -0.278 2 | -0.223 2 | 0.210 0 | 0.216 3 | 0.375 2 | -0.007 8 |
| a6 | 0.053 3 | -0.220 5 | -0.120 0 | 0.011 4 | 0.087 5 | 1.329 1 | 0.029 8 | -0.105 4 | 0.196 3 | 0.024 7 | -0.060 6 | -0.055 4 |
| a7 | -0.083 8 | -0.009 6 | -0.077 5 | 0.061 7 | -0.283 3 | -1.037 9 | 0.106 7 | -0.286 7 | 0.283 5 | 0.228 4 | 0.396 6 | -0.008 3 |
| a8 | 0.013 8 | 0.172 0 | 0.098 7 | 0.004 4 | 0.460 9 | 1.018 3 | 0.104 0 | -0.042 7 | 0.240 9 | 0.047 4 | -0.022 9 | -0.016 6 |
| a9 | 0.138 8 | 0.181 6 | 0.114 2 | 0.144 2 | 0.109 2 | -0.807 5 | 0.079 2 | -0.199 0 | 0.187 6 | 0.175 4 | 0.046 4 | -0.038 7 |
| a10 | 0.024 1 | 0.114 9 | 0.065 8 | 0.060 3 | 0.304 2 | 0.507 2 | -0.046 2 | -0.182 3 | 0.147 3 | 0.041 6 | 0.187 6 | -0.025 6 |
| a11 | 0.014 4 | -0.129 5 | -0.045 9 | -0.009 1 | -0.139 7 | -0.197 7 | -0.081 6 | 0.064 5 | 0.145 1 | -0.004 6 | -0.105 1 | -0.164 5 |
| a12 | -0.001 3 | -0.088 0 | -0.106 2 | 0.021 6 | 0.263 2 | 0.060 6 | -0.137 4 | 0.032 6 | 0.143 7 | -0.002 3 | 0.205 6 | -0.002 6 |
| a13 | 0.012 4 | 0.103 0 | -0.105 6 | 0.004 7 | 0.002 3 | 0.141 6 | 0.000 3 | 0.204 3 | 0.142 6 | 0.000 5 | -0.074 1 | 0.307 5 |
| a14 | 0.015 5 | 0.059 2 | 0.057 1 | -0.041 3 | 0.099 2 | -0.225 6 | 0.036 8 | 0.070 8 | 0.074 5 | 0.087 7 | 0.039 7 | 0.351 7 |
| a15 | 0.073 7 | -0.117 0 | 0.066 2 | -0.067 1 | -0.095 9 | 0.375 1 | 0.153 3 | 0.262 7 | 0.064 5 | -0.020 5 | 0.033 4 | 0.311 1 |
| a16 | -0.029 8 | -0.048 8 | 0.139 1 | -0.018 0 | 0.217 0 | -0.278 7 | -0.036 3 | 0.073 6 | -0.015 1 | 0.053 0 | -0.074 2 | 0.189 6 |
| a17 | 0.061 2 | 0.145 3 | -0.017 6 | -0.068 6 | 0.019 9 | 0.325 8 | -0.090 2 | 0.120 5 | -0.042 0 | -0.021 5 | 0.076 9 | 0.079 9 |
| a18 | -0.056 9 | 0.020 8 | -0.107 9 | 0.003 7 | 0.134 5 | -0.163 1 | -0.073 2 | -0.063 7 | -0.111 9 | -0.069 9 | 0.003 6 | -0.074 9 |
| a19 | -0.104 5 | 0.085 6 | -0.002 7 | 0.052 4 | -0.029 4 | 0.233 6 | 0.015 9 | 0.036 3 | -0.019 2 | 0.043 0 | 0.085 5 | -0.119 2 |
| a20 | -0.034 6 | -0.048 9 | -0.064 9 | -0.136 8 | 0.126 5 | -0.155 3 | 0.027 2 | -0.043 0 | -0.101 1 | -0.125 7 | 0.101 7 | -0.006 2 |
| 状态 | 正常轴承 | 正常轴承 | 正常轴承 | 正常轴承 | 外环故障 | 外环故障 | 外环故障 | 外环故障 | 内环故障 | 内环故障 | 内环故障 | 内环故障 |
| 结果* | 训练数据 | 训练数据 | 1 | 1 | 训练数据 | 训练数据 | 2 | 2 | 训练数据 | 训练数据 | 3 | 3 |
* 本栏中, 1代表正常轴承, 2代表外环故障轴承, 3代表内环故障轴承
表2 正常轴承训练样本数量与正确识别率结果 Table 2 Amount of training samples and accurate recognizing results of normal bearings
《表2》
| 训练样本 | 10 | 12 | 14 | 16 | 18 | 20 | 22 | 24 | 26 | 28 | 30 | 32 | 34 |
| 识别结果 | 0.42 | 0.57 | 0.71 | 0.73 | 0.72 | 0.81 | 0.89 | 0.92 | 0.93 | 0.87 | 0.82 | 0.67 | 0.57 |
表3 外环轴承故障训练样本数量与正确识别率结果 Table 3 Amount of training samples and accurate recognizing results of bearings with outer rings fault
《表3》
| 训练样本 | 10 | 12 | 14 | 16 | 18 | 20 | 22 | 24 | 26 | 28 | 30 | 32 | 34 |
| 识别结果 | 0.35 | 0.67 | 0.65 | 0.91 | 0.94 | 0.93 | 0.93 | 0.91 | 0.89 | 0.74 | 0.65 | 0.61 | 0.61 |
表4 内环轴承故障训练样本数量与正确识别率结果 Table 4 Amount of training samples and accurate recognizing results of bearings with inner rings fault
《表4》
| 训练样本 | 10 | 12 | 14 | 16 | 18 | 20 | 22 | 24 | 26 | 28 | 30 | 32 | 34 |
| 识别结果 | 0.44 | 0.51 | 0.72 | 0.77 | 0.90 | 0.92 | 0.93 | 0.90 | 0.85 | 0.81 | 0.86 | 0.71 | 0.64 |
《6 结语》
6 结语
笔者的研究表明, 径向基函数神经网络用于滚动轴承故障模式识别是非常有效的。只要网络训练集规模选择合理, RBF网络就能准确地完成从滚动轴承振动信号空间到滚动轴承故障状态空间的非线性映射, 较好地满足工程中的需要, 并具有广阔的应用前景。











 京公网安备 11010502051620号
京公网安备 11010502051620号




