《1 引言》
1 引言
广义预测控制 (GPC) [1 ]
在实际应用中, 一方面改进算法, 提高其运算速度, 如多变量广义预测控制的直接算法。另一方面人们在分析其稳定性和鲁棒性方面也作了大量的工作[2 ]
《2 MIMO-GPC算法描述》
2 MIMO-GPC算法描述
A ( z − 1 ) Δ y ( k ) = B ( z − 1 ) Δ u ( k − 1 ) ( 1 ) A ( z - 1 ) Δ y ( k ) = B ( z - 1 ) Δ u ( k - 1 ) ( 1 )
A ( z − 1 ) = I + A 1 z − 1 + ⋯ + A n a z − n a ( 2 ) B ( z − 1 ) = B 0 + B 1 z − 1 + ⋯ + B n b z − n b ( 3 ) A ( z - 1 ) = Ι + A 1 z - 1 + ⋯ + A n a z - n a ( 2 ) B ( z - 1 ) = B 0 + B 1 z - 1 + ⋯ + B n b z - n b ( 3 )
y (k ) 和u (k ) 分别表示系统在当前的被控对象和控制量, n ×1维向量。
J = ∑ j = 1 N ∥ y ˆ ( k + j | k ) − w ( k + j ) ∥ 2 + Λ ∑ j = 1 N u ∥ Δ u ( k + j − 1 ) ∥ 2 ( 4 ) J = ∑ j = 1 Ν ∥ y ^ ( k + j | k ) - w ( k + j ) ∥ 2 + Λ ∑ j = 1 Ν u ∥ Δ u ( k + j - 1 ) ∥ 2 ( 4 )
其中{ y ˆ ( k + j | k ) } { y ^ ( k + j | k ) } y (k ) 的前向j 步预测序列, N 为预测步长, N u 为控制步长, Λ =diag (λ 1 , …, λ n w (k +j ) }为要跟踪的设定值柔化序列, 由如下动态方程产生:
w ( k ) = y ( k ) , w ( k + j ) = α w ( k + j − 1 ) + α ′ y r ( k ) , j = 1 , ⋯ , N ( 5 ) w ( k ) = y ( k ) , w ( k + j ) = α w ( k + j - 1 ) + α ′ y r ( k ) , j = 1 , ⋯ , Ν ( 5 )
其中α =diag {α 1 , …, α n α ′=diag {1-α 1 , …, 1-α n y r (k ) 为当前设定值。
为得到输出的向前第j 步预测值y ˆ ( k + j | k ) y ^ ( k + j | k )
I = E ′ j ( z − 1 ) A ( z − 1 ) Δ + z − j F j ( z − 1 ) , j = 1 , ⋯ , N ( 6 ) E ′ j ( z − 1 ) B ( z − 1 ) = G ′ j ( z − 1 ) + z − j H j ( z − 1 ) , j = 1 , ⋯ , N ( 7 ) Ι = E ′ j ( z - 1 ) A ( z - 1 ) Δ + z - j F j ( z - 1 ) , j = 1 , ⋯ , Ν ( 6 ) E ′ j ( z - 1 ) B ( z - 1 ) = G ′ j ( z - 1 ) + z - j Η j ( z - 1 ) , j = 1 , ⋯ , Ν ( 7 )
E ′ j ( z − 1 ) = E 0 + E 1 z − 1 + ⋯ + E j − 1 z − ( j − 1 ) ( 8 ) F j ( z − 1 ) = F j 0 + F j 1 z − 1 + ⋯ + F j n a z − n a ( 9 ) G ′ j ( z − 1 ) = G 0 + G 1 z − 1 + ⋯ + G j − 1 z − ( j − 1 ) ( 1 0 ) H j ( z − 1 ) = H j 0 + H j 1 z − 1 + ⋯ + H j n b − 1 z − ( n b − 1 ) ( 1 1 ) Δ = 1 − z − 1 。 E ′ j ( z - 1 ) = E 0 + E 1 z - 1 + ⋯ + E j - 1 z - ( j - 1 ) ( 8 ) F j ( z - 1 ) = F j 0 + F j 1 z - 1 + ⋯ + F j n a z - n a ( 9 ) G ′ j ( z - 1 ) = G 0 + G 1 z - 1 + ⋯ + G j - 1 z - ( j - 1 ) ( 1 0 ) Η j ( z - 1 ) = Η j 0 + Η j 1 z - 1 + ⋯ + Η j n b - 1 z - ( n b - 1 ) ( 1 1 ) Δ = 1 - z - 1 。
当B (z -1 ) =B 0 时, H j z -1 ) =0, 此时G ′j z -1 ) =B 0 E ′j z -1 ) 该丢番图方程递推解为:
E ′ j ( z − 1 ) = I ‚ F 1 ( z − 1 ) = z [ I − A ¯ ¯ ¯ ( z − 1 ) ] ‚ A ¯ ¯ ¯ ( z − 1 ) = A ( z − 1 ) Δ ( 1 2 ) E ′ j + 1 ( z − 1 ) = E ′ j ( z − 1 ) + r j z − j ‚ F j + 1 ( z − 1 ) = z [ F j ( z − 1 ) − r j A ¯ ¯ ¯ ( z − 1 ) ] , j = 1 , ⋯ , N ( 1 3 ) r j = F j 0 ( 1 4 ) E ′ j ( z - 1 ) = Ι ‚ F 1 ( z - 1 ) = z [ Ι - A ¯ ( z - 1 ) ] ‚ A ¯ ( z - 1 ) = A ( z - 1 ) Δ ( 1 2 ) E ′ j + 1 ( z - 1 ) = E ′ j ( z - 1 ) + r j z - j ‚ F j + 1 ( z - 1 ) = z [ F j ( z - 1 ) - r j A ¯ ( z - 1 ) ] , j = 1 , ⋯ , Ν ( 1 3 ) r j = F j 0 ( 1 4 )
E ′ j ( z − 1 ) A ( z − 1 ) Δ y ( k ) = E ′ j ( z − 1 ) B ( z − 1 ) Δ u ( k − 1 ) ( 1 5 ) E ′ j ( z - 1 ) A ( z - 1 ) Δ y ( k ) = E ′ j ( z - 1 ) B ( z - 1 ) Δ u ( k - 1 ) ( 1 5 )
将式 (6) 和式 (7) 式代入式 (15) 得
y ( k ) = G ′ j ( z − 1 ) Δ u ( k − 1 ) + F j ( z − 1 ) y ( k − j ) + H j ( z − 1 ) Δ u ( k − j − 1 ) ( 1 6 ) y ( k ) = G ′ j ( z - 1 ) Δ u ( k - 1 ) + F j ( z - 1 ) y ( k - j ) + Η j ( z - 1 ) Δ u ( k - j - 1 ) ( 1 6 )
y ˆ ( k + j | k ) = G ′ j ( z − 1 ) Δ u ( k + j − 1 ) + F j ( z − 1 ) y ( k ) + H j ( z − 1 ) Δ u ( k − 1 ) ( 1 7 ) y ^ ( k + j | k ) = G ′ j ( z - 1 ) Δ u ( k + j - 1 ) + F j ( z - 1 ) y ( k ) + Η j ( z - 1 ) Δ u ( k - 1 ) ( 1 7 )
Y = [ y ˆ ( k + j Y = [ y ^ ( k + j k ) T , ⋯ , y ˆ ( k + N k ) Τ , ⋯ , y ^ ( k + Ν k ) T ]T ,
Δ U = [ Δ u ( k ) T , ⋯ , Δ u ( k + N u − 1 ) T ] T , F ( z − 1 ) = [ F 1 ( z − 1 ) T , ⋯ , F N ( z − 1 ) T ] , H ( z − 1 ) = [ H 1 ( z − 1 ) T , ⋯ , H N ( z − 1 ) T ] , W = [ w ( k + 1 ) T , ⋯ , w ( k + N ) T ] T , G = ⎡ ⎣ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ G 0 G 1 ⋮ G N u − 1 ⋮ G N − 1 0 G 0 ⋮ G N u − 2 ⋮ G N − 2 ⋯ ⋯ ⋯ ⋯ 0 0 ⋮ G 0 ⋮ G N − N u ⎤ ⎦ ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ 。 Δ U = [ Δ u ( k ) Τ , ⋯ , Δ u ( k + Ν u - 1 ) Τ ] Τ , F ( z - 1 ) = [ F 1 ( z - 1 ) Τ , ⋯ , F Ν ( z - 1 ) Τ ] , Η ( z - 1 ) = [ Η 1 ( z - 1 ) Τ , ⋯ , Η Ν ( z - 1 ) Τ ] , W = [ w ( k + 1 ) Τ , ⋯ , w ( k + Ν ) Τ ] Τ , G = [ G 0 0 ⋯ 0 G 1 G 0 ⋯ 0 ⋮ ⋮ ⋮ G Ν u - 1 G Ν u - 2 ⋯ G 0 ⋮ ⋮ ⋮ G Ν - 1 G Ν - 2 ⋯ G Ν - Ν u ] 。
Y = G Δ U + F ( z − 1 ) y ( k ) + H ( z − 1 ) Δ u ( k − 1 ) ( 1 8 ) Y = G Δ U + F ( z - 1 ) y ( k ) + Η ( z - 1 ) Δ u ( k - 1 ) ( 1 8 )
J = ∥ Y − W ∥ 2 + ∥ Δ U ∥ 2 Λ , ( 1 9 ) J = ∥ Y - W ∥ 2 + ∥ Δ U ∥ Λ 2 , ( 1 9 )
将式 (18) 代入式 (19) , 令 ∂J /∂Δu =0, 得控制律:
Δ U = ( G T G + Λ ) − 1 G T ( W − F ( z − 1 ) y ( k ) − H ( z − 1 ) Δ u ( k − 1 ) ) ( 2 0 ) Δ U = ( G Τ G + Λ ) - 1 G Τ ( W - F ( z - 1 ) y ( k ) - Η ( z - 1 ) Δ u ( k - 1 ) ) ( 2 0 )
(G T G +Λ ) -1 G T 的前N 行为P T =[P 1 , …, P N P j j =1, …, N ) 是n ×n 矩阵。于是, 式 (18) 可写为
Δ u ( k ) = P T ( W − F ( z − 1 ) y ( k ) − z − 1 H ( z − 1 ) Δ u ( k ) ) ( 2 1 ) Δ u ( k ) = Ρ Τ ( W - F ( z - 1 ) y ( k ) - z - 1 Η ( z - 1 ) Δ u ( k ) ) ( 2 1 )
《3 MIMO-GPC 闭环反馈系统》
3 MIMO-GPC 闭环反馈系统
W = F α y ( k ) + F ¯ ¯ ¯ α y r ( k ) ( 2 2 ) W = F α y ( k ) + F ¯ α y r ( k ) ( 2 2 )
F α = [ α , α 2 , ⋯ , α N ] T , F ¯ ¯ ¯ α = [ I − α , I − α 2 , ⋯ , I − α N ] T 。 α 2 = d i a g { α 1 2 ⋯ α n 2 } , ⋯ , α N = d i a g { α 1 N ⋯ α n N } F α = [ α , α 2 , ⋯ , α Ν ] Τ , F ¯ α = [ Ι - α , Ι - α 2 , ⋯ , Ι - α Ν ] Τ 。 α 2 = d i a g { α 1 2 ⋯ α n 2 } , ⋯ , α Ν = d i a g { α 1 Ν ⋯ α n Ν }
Δ u ( k ) = P T [ F ¯ ¯ ¯ α y r ( k ) − ( F ( z − 1 ) − F α ) y ( k ) ] ( 2 3 ) Δ u ( k ) = Ρ Τ [ F ¯ α y r ( k ) - ( F ( z - 1 ) - F α ) y ( k ) ] ( 2 3 )
T ( z − 1 ) Δ u ( k ) = R y r ( k ) − S ( z − 1 ) y ( k ) ( 2 4 ) Τ ( z - 1 ) Δ u ( k ) = R y r ( k ) - S ( z - 1 ) y ( k ) ( 2 4 )
T ( z − 1 ) = I + z − 1 P T H ¯ ¯ ¯ ( z − 1 ) ( 2 5 ) R = P T F ¯ ¯ ¯ α ( 2 6 ) S ( z − 1 ) = ( P T F ( z − 1 ) − F α ) ( 2 7 ) Τ ( z - 1 ) = Ι + z - 1 Ρ Τ Η ¯ ( z - 1 ) ( 2 5 ) R = Ρ Τ F ¯ α ( 2 6 ) S ( z - 1 ) = ( Ρ Τ F ( z - 1 ) - F α ) ( 2 7 )
Δ u ( k ) = z B − 1 ( z − 1 ) A ( z − 1 ) Δ y ( k ) ( 2 8 ) Δ u ( k ) = z B - 1 ( z - 1 ) A ( z - 1 ) Δ y ( k ) ( 2 8 )
z T ( z − 1 ) B − 1 ( z − 1 ) A ( z − 1 ) Δ y ( k ) = R y r ( k ) − S ( z − 1 ) y ( k ) ( 2 9 ) z Τ ( z - 1 ) B - 1 ( z - 1 ) A ( z - 1 ) Δ y ( k ) = R y r ( k ) - S ( z - 1 ) y ( k ) ( 2 9 )
( z T ( z − 1 ) B − 1 ( z − 1 ) A ( z − 1 ) Δ + S ( z − 1 ) ) B ( z − 1 ) B − 1 ( z − 1 ) y ( k ) = R y r ( k ) ( 3 0 ) ( z Τ ( z - 1 ) B - 1 ( z - 1 ) A ( z - 1 ) Δ + S ( z - 1 ) ) B ( z - 1 ) B - 1 ( z - 1 ) y ( k ) = R y r ( k ) ( 3 0 )
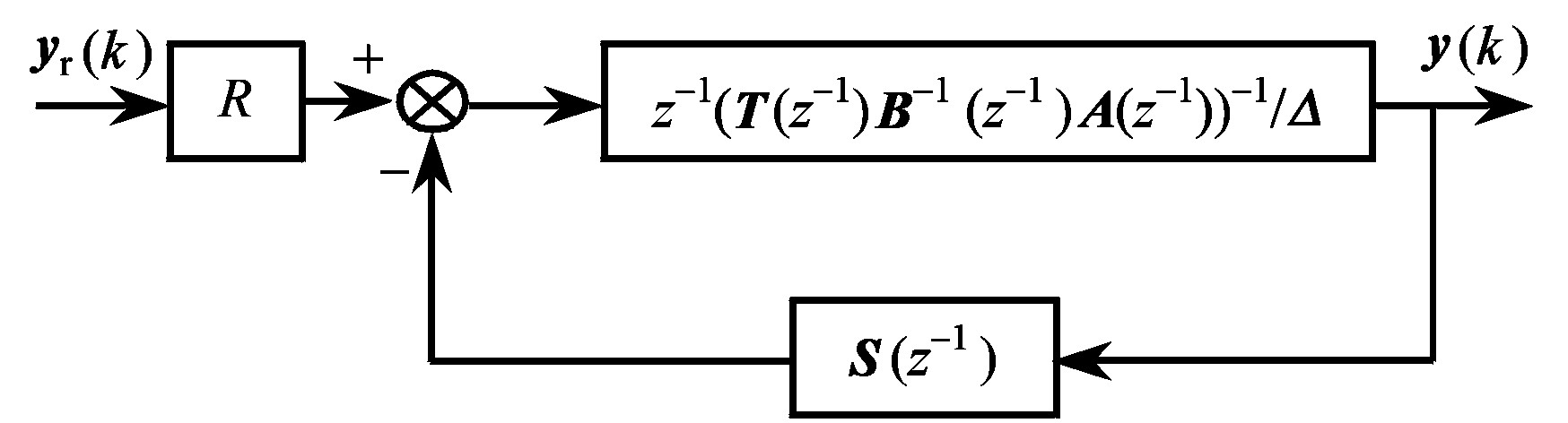
由式 (28) 可得MIMO-GPC闭环反馈结构框图, 如图1所示。闭环传递函数可表示为:
G ∗ ( z − 1 ) = ( z T ( z − 1 ) B − 1 ( z − 1 ) A ( z ) Δ + S ( z − 1 ) ) − 1 R ( 3 1 ) G * ( z - 1 ) = ( z Τ ( z - 1 ) B - 1 ( z - 1 ) A ( z ) Δ + S ( z - 1 ) ) - 1 R ( 3 1 )
《图1》
图1MIMO-GPC反馈结构框图
Fig.1 Structure of MIMO-GPC
《4 多变量系统的特性和频域稳定性判据》
4 多变量系统的特性和频域稳定性判据
《4.1多变量反馈系统的基本结构和相关矩阵》
4.1多变量反馈系统的基本结构和相关矩阵
H ( s ) = Q ( s ) [ I r + F ( s ) Q ( s ) ] − 1 = Q ( s ) D e − 1 ( s ) ( 3 2 ) Η ( s ) = Q ( s ) [ Ι r + F ( s ) Q ( s ) ] - 1 = Q ( s ) D e - 1 ( s ) ( 3 2 )
H ( s ) = [ I m + Q ( s ) F ( s ) ] − 1 Q ( s ) = D y − 1 ( s ) Q ( s ) ( 3 3 ) Η ( s ) = [ Ι m + Q ( s ) F ( s ) ] - 1 Q ( s ) = D y - 1 ( s ) Q ( s ) ( 3 3 )
《图2》
图2闭环反馈结构框图
Fig.2 Structure of closed-loop feedback
当det Q (s ) ≠0时, H (s ) 必定为非奇异矩阵, 它的逆为
H − 1 ( s ) = { [ I m + Q ( s ) F ( s ) ] − 1 Q ( s ) } − 1 = Q − 1 ( s ) [ I m + Q ( s ) F ( s ) ] = Q − 1 ( s ) + F ( s ) ( 3 4 ) Η - 1 ( s ) = { [ Ι m + Q ( s ) F ( s ) ] - 1 Q ( s ) } - 1 = Q - 1 ( s ) [ Ι m + Q ( s ) F ( s ) ] = Q - 1 ( s ) + F ( s ) ( 3 4 )
对式 (32) 至式 (34) 的两端分别求行列式, 可推导出回差矩阵行列式的几个关系如下:
det [ I r + F ( s ) Q ( s ) ] = det Q ( s ) / det H ( s ) = det H − 1 ( s ) / det Q − 1 ( s ) = det [ Q − 1 ( s ) + F ( s ) ] / det Q − 1 ( s ) = det [ I m + Q ( s ) F ( s ) ] ( 3 5 ) det [ Ι r + F ( s ) Q ( s ) ] = det Q ( s ) / det Η ( s ) = det Η - 1 ( s ) / det Q - 1 ( s ) = det [ Q - 1 ( s ) + F ( s ) ] / det Q - 1 ( s ) = det [ Ι m + Q ( s ) F ( s ) ] ( 3 5 )
令闭环特征多项式为ρ c (s ) , 开环特征多项式为ρ o (s ) 。可得
ρ c ( s ) / ρ o ( s ) = det [ I m + Q ( s ) F ( s ) ] = det [ I r + F ( s ) Q ( s ) ] ( 3 6 ) ρ c ( s ) / ρ o ( s ) = det [ Ι m + Q ( s ) F ( s ) ] = det [ Ι r + F ( s ) Q ( s ) ] ( 3 6 )
《4.2多变量闭环系统频域稳定性判据》
4.2多变量闭环系统频域稳定性判据
作为单变量系统稳定的充分必要条件, 特征多项式在右半平面无零点。可把这个概念扩充到多变量系统。
对于图2系统, 开环稳定的充要条件是开环特征多项式ρ o (s ) 的全部零点都位于复平面的开左半平面上。
同理, 该系统闭环稳定的充分必要要条件是闭环特征多项式ρ c (s ) 的全部零点都位于复平面的开左半平面上。
开环特征多项式ρ o (s ) 、闭环特征多项式ρ c (s ) 和回差矩阵行列式存在如下关系式[3 ]
ρ c ( s ) ρ o ( s ) = det [ I m + Q ( s ) F ( s ) ] = ∏ i = 1 n ( s − a ′ i ) / ∏ j = 1 n ) ( s − a j ) ( 3 7 ) ρ c ( s ) ρ o ( s ) = det [ Ι m + Q ( s ) F ( s ) ] = ∏ i = 1 n ( s - a ′ i ) / ∏ j = 1 n ) ( s - a j ) ( 3 7 )
式中a ′i ρ c (s ) 的零点, 也就是系统的闭环极点。a ′i ρ o (s ) 的零点, 也就是系统的开环极点。因此, 只要求得回差矩阵行列式, 就可计算系统的开环极点和闭环极点, 进而分析系统的稳定性。
在介绍多变量系统的奈奎斯特图之前, 首先定义D型围线, 它是以半径无穷大的半圆顺时针包围右半复平面一周所形成的围线。如果在此围线上有传递函数的极点, 则以半径为无穷小的半圆从右侧绕过。这样得到的围线成为D型围线。
多变量系统的奈奎斯特图可描述如下[3 ] D (s ) 为非奇异方阵, 它的行列式det D (s ) 就是s 的标量函数。当s 沿D型围线变化一周时, 函数det D (s ) 在复平面上划出一条闭合曲线, 这条曲线称为det D (s ) 的奈奎斯特图。这条闭合曲线顺时针包围复平面上坐标为a +jb 的点A 的周数称为函数矩阵D (s ) 关于A 点的周数, 记为
e n c ( D ( s ) , a + j b ) ( 3 8 ) e n c ( D ( s ) , a + j b ) ( 3 8 )
e n c ( D ( s ) , A ) ( 3 9 ) e n c ( D ( s ) , A ) ( 3 9 )
多变量系统的Nyquist稳定判据可描述如下:设开环特征多项式ρ o (s ) 在右半s 平面上有n 0 个零点, 则闭环系统稳定的充分必要条件是
e n c D ( s ) = − n 0 ( 4 1 ) e n c D ( s ) = - n 0 ( 4 1 )
根据从s 平面到z 平面的映射关系, 不难得出多变量离散系统的稳定性判据。离散控制系统稳定的充分必要条件是:
当且仅当离散特征方程的全部特征根均分布在z 平面上的单位圆内, 或者特征根的模均小于1, 相应的离散系统是稳定的。
同样, 多变量离散系统的Nyquist稳定判据可描述如下:设开环特征多项式ρ o (s ) 在z 平面的单位圆外上有n 0 个零点, 则闭环系统稳定的充分必要条件是
e n c D ( z ) = − n 0 ( 4 2 ) e n c D ( z ) = - n 0 ( 4 2 )
《5 基于频域的MIMO-GPC算法稳定性判据》
5 基于频域的MIMO-GPC算法稳定性判据
Q ( z − 1 ) = z − 1 ( T ( z − 1 ) B − 1 ( z − 1 ) A ( z − 1 ) ) − 1 / Δ ( 4 3 ) Q ( z - 1 ) = z - 1 ( Τ ( z - 1 ) B - 1 ( z - 1 ) A ( z - 1 ) ) - 1 / Δ ( 4 3 )
因为图1中的R 为一常数阵, 在稳定性分析中可只考虑闭环回路中Q (z -1 ) , S (z -1 ) 的作用。系统的回差矩阵D (z -1 ) 可表示为
D ( z − 1 ) = I + Q ( z − 1 ) S ( z − 1 ) ( 4 4 ) D ( z - 1 ) = Ι + Q ( z - 1 ) S ( z - 1 ) ( 4 4 )
开环特征多项式ρ o (z -1 ) 、闭环特征多项式ρ c (z -1 ) 和回差矩阵行列式存在如下关系式:
ρ c ( z − 1 ) / ρ o ( z − 1 ) = det [ I + Q ( z − 1 ) S ( z − 1 ) ] = det D ( z − 1 ) ( 4 5 ) ρ c ( z - 1 ) / ρ o ( z - 1 ) = det [ Ι + Q ( z - 1 ) S ( z - 1 ) ] = det D ( z - 1 ) ( 4 5 )
因此det D (z -1 ) 的极点为开环特征多项式ρ o (z -1 ) 的根, 零点为闭环特征多项式ρ c (z -1 ) 的根。
可以由MIMO-GPC的闭环反馈结构和回差矩阵, 对MIMO-GPC进行稳定性分析, 提出了稳定性定理1。
定理1 多输入多输出的广义预测控制器闭环反馈结构如图2, 系统稳定的充要条件是回差矩阵行列式
det D ( z − 1 ) = det [ I + Q ( z − 1 ) S ( z − 1 ) ] det D ( z - 1 ) = det [ Ι + Q ( z - 1 ) S ( z - 1 ) ]
的零点均分布在z 平面上的单位圆内, 即回差矩阵行列式零点的模均小于1, 或回差矩阵行列式分子多项式为Hurwitz多项式。
基于离散域内判别系统稳定性的奈奎斯特判据, 提出了MIMO-GPC系统基于频域的稳定性定理2。
定理2 多输入多输出的广义预测控制器闭环反馈结构如图2, 设回差矩阵行列式在单位圆外的根的个数为P ˜ Ρ ˜
e n c [ I + Q ( z − 1 ) S ( z − 1 ) ] = − P ˜ , e n c [ Ι + Q ( z - 1 ) S ( z - 1 ) ] = - Ρ ˜ ,
det D ( z − 1 ) = det [ I + Q ( z − 1 ) S ( z − 1 ) ] det D ( z - 1 ) = det [ Ι + Q ( z - 1 ) S ( z - 1 ) ]
应用定理1和定理2, 可以形象直观地对多变量广义预测控制进行定量的稳定性分析, 并指导控制器参数设计。
《6 仿真研究》
6 仿真研究
[ 1 − 1 . 5 z − 1 + 0 . 4 8 z − 2 − 0 . 1 z − 1 − 0 . 2 z − 1 + 0 . 1 z − 2 1 − 0 . 9 z − 1 + 0 . 2 z − 2 ] ⋅ Δ y ( k ) = [ 1 + 1 . 5 z − 1 0 z − 1 1 + z − 1 ] Δ u ( k − 1 ) ( 4 6 ) [ 1 - 1 . 5 z - 1 + 0 . 4 8 z - 2 - 0 . 2 z - 1 + 0 . 1 z - 2 - 0 . 1 z - 1 1 - 0 . 9 z - 1 + 0 . 2 z - 2 ] ⋅ Δ y ( k ) = [ 1 + 1 . 5 z - 1 z - 1 0 1 + z - 1 ] Δ u ( k - 1 ) ( 4 6 )
控制器参数设定为:N=3, Nu r 1r 2
det D ( z − 1 ) = det [ I + Q ( z − 1 ) S ( z − 1 ) ] = n u m ( z ) / 1 2 8 d e n ( z ) ( 4 7 ) det D ( z - 1 ) = det [ Ι + Q ( z - 1 ) S ( z - 1 ) ] = n u m ( z ) / 1 2 8 d e n ( z ) ( 4 7 )
n u m ( z ) = 5 . 1 9 2 z 8 − 1 . 1 4 0 z 7 − 1 . 1 3 9 z 6 − 1 . 0 0 4 z 5 + 0 . 3 2 3 0 z 4 + 0 . 1 2 7 2 z 3 + 0 . 0 4 6 8 5 z 2 − 0 . 0 1 2 6 9 z + 0 . 0 0 0 6 9 2 3 ( 4 8 ) d e n ( z ) = ( 0 . 0 4 0 5 6 z 6 − 0 . 0 2 3 6 8 z 5 − 0 . 0 6 2 9 7 z 4 + 0 . 0 4 1 2 7 z 3 + 0 . 0 1 5 6 2 z 2 − 0 . 0 1 6 2 4 z + 0 . 0 0 3 1 ) ( z − 1 ) 2 ( 4 9 ) n u m ( z ) = 5 . 1 9 2 z 8 - 1 . 1 4 0 z 7 - 1 . 1 3 9 z 6 - 1 . 0 0 4 z 5 + 0 . 3 2 3 0 z 4 + 0 . 1 2 7 2 z 3 + 0 . 0 4 6 8 5 z 2 - 0 . 0 1 2 6 9 z + 0 . 0 0 0 6 9 2 3 ( 4 8 ) d e n ( z ) = ( 0 . 0 4 0 5 6 z 6 - 0 . 0 2 3 6 8 z 5 - 0 . 0 6 2 9 7 z 4 + 0 . 0 4 1 2 7 z 3 + 0 . 0 1 5 6 2 z 2 - 0 . 0 1 6 2 4 z + 0 . 0 0 3 1 ) ( z - 1 ) 2 ( 4 9 )
由式 (45) 可知num (z) 为闭环特征多项式, 其根为闭环传递函数的极点, 定义为ρc den (z) 则为开环特征多项式, 其根为开环传递函数的极点, 定义为ρo
ρ c = 0 . 6 1 5 5 + 0 . 1 0 4 1 j , 0 . 6 1 5 5 − 0 . 1 0 4 1 j , − 0 . 3 4 7 1 + 0 . 4 4 9 0 j , − 0 . 3 4 7 1 − 0 . 4 4 9 0 j , − 0 . 0 1 5 0 6 + 0 . 2 6 3 9 j , − 0 . 0 1 5 0 6 − 0 . 2 6 3 9 j , − 0 . 2 1 7 5 , − 0 . 0 6 9 6 0 ; ρ o = − 1 . 0 7 6 , − 0 . 7 3 9 5 , 1 . 0 8 7 , 0 . 9 9 9 9 , 0 . 9 9 9 9 , 0 . 5 0 1 9 , 0 . 4 0 5 1 + 0 . 1 0 8 1 j , 0 . 4 0 5 1 − 0 . 1 0 8 1 j 。 ρ c = 0 . 6 1 5 5 + 0 . 1 0 4 1 j , 0 . 6 1 5 5 - 0 . 1 0 4 1 j , - 0 . 3 4 7 1 + 0 . 4 4 9 0 j , - 0 . 3 4 7 1 - 0 . 4 4 9 0 j , - 0 . 0 1 5 0 6 + 0 . 2 6 3 9 j , - 0 . 0 1 5 0 6 - 0 . 2 6 3 9 j , - 0 . 2 1 7 5 , - 0 . 0 6 9 6 0 ; ρ o = - 1 . 0 7 6 , - 0 . 7 3 9 5 , 1 . 0 8 7 , 0 . 9 9 9 9 , 0 . 9 9 9 9 , 0 . 5 0 1 9 , 0 . 4 0 5 1 + 0 . 1 0 8 1 j , 0 . 4 0 5 1 - 0 . 1 0 8 1 j 。
可见, 闭环极点8个都在单位圆内, 满足定理1对于MIMO -GPC 控制器闭环系统稳定的充分必要条件。
回差矩阵行列式奈奎斯特图如图3所示, 由图3可见该系统的回差矩阵D (z ) 关于原点的周数为
《图3》
图3回差矩阵行列式的奈奎斯特图
Fig.3 Nquist diagram of return difference determinant
e n c ( D ( z ) ) = − 2 , e n c ( D ( z ) ) = - 2 ,
而系统的开环极点有2个在单位圆外, 满足定理2闭环系统稳定的充分必要条件。
图4为该系统的输出仿真曲线, 能很好的跟踪目标函数, 系统稳定收敛符合根据定理1和定理2的分析结果。
《图4》
图4仿真输出
Fig.4 Results of simulation
与单变量β-GPC[4 ] β 因子, 即在式 (21) 乘β , 仿真表明对系统的稳定性有明显影响。
Δ u ( k ) = β P T ( W − F ( z − 1 ) y ( k ) − z − 1 H ( z − 1 ) Δ u ( k ) ) ( 5 0 ) Δ u ( k ) = β Ρ Τ ( W - F ( z - 1 ) y ( k ) - z - 1 Η ( z - 1 ) Δ u ( k ) ) ( 5 0 )
式 (46) 所描述系统中, 其他控制参数不变, 取β =1.22, 代入式 (25) 至式 (27) , 计算闭环传递函数和回差矩阵D (z ) , 得闭环特征多项式为
n u m ( z ) = 8 . 3 0 8 z 8 − 5 . 8 1 6 z 7 − 7 . 0 5 4 z 6 − 3 . 6 9 z 5 + 1 . 7 4 9 z 4 + 0 . 5 6 8 8 z 3 − 0 . 8 0 9 z 2 − 0 . 1 3 8 3 z + 0 . 0 1 6 4 9 ( 5 1 ) n u m ( z ) = 8 . 3 0 8 z 8 - 5 . 8 1 6 z 7 - 7 . 0 5 4 z 6 - 3 . 6 9 z 5 + 1 . 7 4 9 z 4 + 0 . 5 6 8 8 z 3 - 0 . 8 0 9 z 2 - 0 . 1 3 8 3 z + 0 . 0 1 6 4 9 ( 5 1 )
d e n ( z ) = ( 0 . 1 6 2 2 z 6 − 0 . 0 2 9 9 1 z 5 − d e n ( z ) = ( 0 . 1 6 2 2 z 6 - 0 . 0 2 9 9 1 z 5 -
0 . 3 4 4 4 z 4 + 0 . 1 4 4 0 z 3 + 0 . 1 4 2 5 z 2 − 0 . 1 0 4 3 z + 0 . 0 1 8 4 6 ) ( z − 1 ) 2 ( 5 2 ) 0 . 3 4 4 4 z 4 + 0 . 1 4 4 0 z 3 + 0 . 1 4 2 5 z 2 - 0 . 1 0 4 3 z + 0 . 0 1 8 4 6 ) ( z - 1 ) 2 ( 5 2 )
由式 (51) 和式 (52) 可分别计算出闭环极点ρ c 和开环极点ρ o :
ρ c = 0 . 8 0 7 2 , − 1 . 0 4 2 , 0 . 3 8 7 4 + 0 . 3 7 3 9 j , 0 . 3 8 7 4 − 0 . 3 7 3 9 j , − 0 . 5 3 5 7 + 0 . 3 2 7 6 j , − 0 . 5 3 5 7 − 0 . 3 2 7 6 j , − 0 . 2 5 0 4 , 0 . 0 8 2 3 3 ; ρ o = − 1 . 3 1 3 , − 0 . 9 0 2 1 , 1 . 0 8 8 , 0 . 9 9 9 9 , 0 . 9 9 9 9 , 0 . 5 0 1 9 , 0 . 4 0 5 1 + 0 . 1 0 8 1 j , 0 . 4 0 5 1 − 0 . 1 0 8 1 j 。 ρ c = 0 . 8 0 7 2 , - 1 . 0 4 2 , 0 . 3 8 7 4 + 0 . 3 7 3 9 j , 0 . 3 8 7 4 - 0 . 3 7 3 9 j , - 0 . 5 3 5 7 + 0 . 3 2 7 6 j , - 0 . 5 3 5 7 - 0 . 3 2 7 6 j , - 0 . 2 5 0 4 , 0 . 0 8 2 3 3 ; ρ o = - 1 . 3 1 3 , - 0 . 9 0 2 1 , 1 . 0 8 8 , 0 . 9 9 9 9 , 0 . 9 9 9 9 , 0 . 5 0 1 9 , 0 . 4 0 5 1 + 0 . 1 0 8 1 j , 0 . 4 0 5 1 - 0 . 1 0 8 1 j 。
并绘出回差矩阵行列式det D (z 1 ) 的奈奎斯特图如图5所示。
《图5》
图5β =1.22回差矩阵行列式的奈奎斯特图
Fig.5 β =1.22 Nquist diagram of return difference determinant
闭环极点ρ c 有一个在单位圆外, 不满足定理1的系统稳定充要条件。开环极点 ρ o 有2个在单位圆外, 而奈奎斯特图表明周数
e n c ( D ( z ) ) = − 1 , e n c ( D ( z ) ) = - 1 ,
不满足定理2的系统稳定充要条件。系统的输出仿真曲线见图6。系统的输出仿真曲线是振荡发散。
《图6》
图6β =1.22系统仿真输出
Fig.6 β =1.22 results of simulation
《7 结论》
7 结论
笔者提出并证明基于频域的多变量广义预测控制 (MIMO-GPC) 稳定性的分析方法, 可利用Nyquist稳定性判据, 分析基于闭环特征多项式的MIMO-GPC的稳定性。仿真表明这些判据形象直观, 可作为MIMO-GPC控制器参数设计的重要依据。为多变量预测控制的应用提供了重要的设计方法。
















 京公网安备 11010502051620号
京公网安备 11010502051620号




