

空中共振是一种在飞行中旋翼周期型振型与机体运动相耦合的气弹/机械动不稳定性问题,是随着具有无铰式、无轴承式等新型旋翼直升机的发展而出现的。研究表明,其主要的自激振动源是旋翼后退型摆振运动与旋翼桨毂中心具有水平运动的机体模态的耦合[1]。整个耦合系统中旋翼系统包括旋翼的摆振、变距、挥舞 3 个自由度。这 3 个自由度的弹性振动会引起相应的气动力变化,并反馈于旋翼振动。这 3 个自由度之间又存在气动、结构和惯性的耦合,并且必须考虑空气动力。因此,这个动不稳定性也是一个气弹耦合动不稳定性问题。国外从 20 世纪 80 年代开始建立分析模型,研究旋翼的各种结构耦合对系统动稳定性的影响,认为变距/摆振耦合可以抑制系统的动不稳定性[2],变距/挥舞耦合对系统的动不稳定性的影响较小[3]。国内亦很早开始空中共振的研究,建立了计入动力入流及旋翼挥舞/摆振耦合的分析模型,计算结果与实验数据吻合较好。分析结果认为,引入动力入流降低了机体模态阻尼[4],挥摆结构耦合可以抑制旋翼/机体耦合系统的动不稳定性[5]。然而,由于没有计入变距自由度,在某些情况下会加大分析结果与实验数据之间的误差。为了进一步完善该理论,笔者建立了引入变距/摆振耦合的空中共振分型模型,在模型中计入变距自由度,并从特征向量与各自由度间的相互作用出发,从能量的角度清晰地阐述了空中共振机理,研究对空中共振影响较大的变距/摆振几何耦合;其次,在分析中采用直升机空中共振及地面共振统一分析模型[6]。
《1 分析模型》
1 分析模型
《1.1 模型假设》
1.1 模型假设
把机体作为刚体来处理,在机体自由度中,只保留绕重心滚转和俯仰转动。
桨叶完全考虑挥舞、摆振及变距自由度,引入挥舞/摆振/扭转耦合和挥舞/摆振结构耦合。
对于桨叶的挥舞及摆振运动,只考虑其基阶振型引入挥舞铰、摆振铰外伸量的等效铰模型。桨叶质量均布,呈矩形平面状,无扭转,剖面为对称翼型,略去重力作用。
线性空气动力,准定常假设,不计入动力入流。
《1.2 旋翼和机体模型》
1.2 旋翼和机体模型
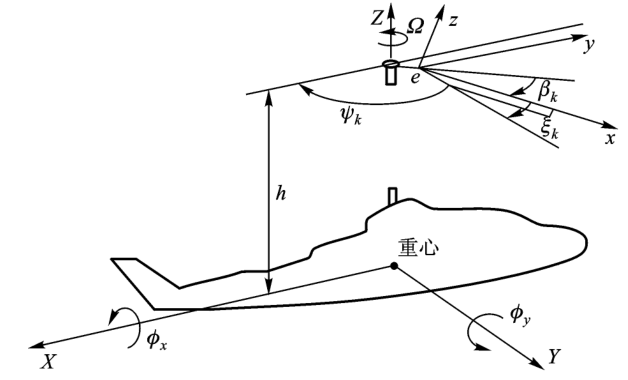
机体作为刚体处理,考虑机体纵横向质量非对称。在旋翼模态中,空中共振只考虑挥舞/摆振的基阶模态。在确定约束刚度时,对于带弹性轴承的星形柔性旋翼,铰的中心即为球面轴承中心,约束刚度取决于具体构造。旋翼挥舞/摆振结构耦合模型采用报告①的结构耦合模型。挥舞/摆振/扭转结构耦合模型及变距/摆振几何耦合模型均采用文献[1] 的耦合模型。在旋翼的气动模型中,定常状态诱导速度沿桨叶展向线性分布,如图 1 所示。
① 张晓谷.旋翼周期型整体振型的复数坐标表示法及其在经典地面共振分析中的应用(直升机空中及地面共振研究之一).南航科技报告,NHJB-88-5146,1988
《图 1 》
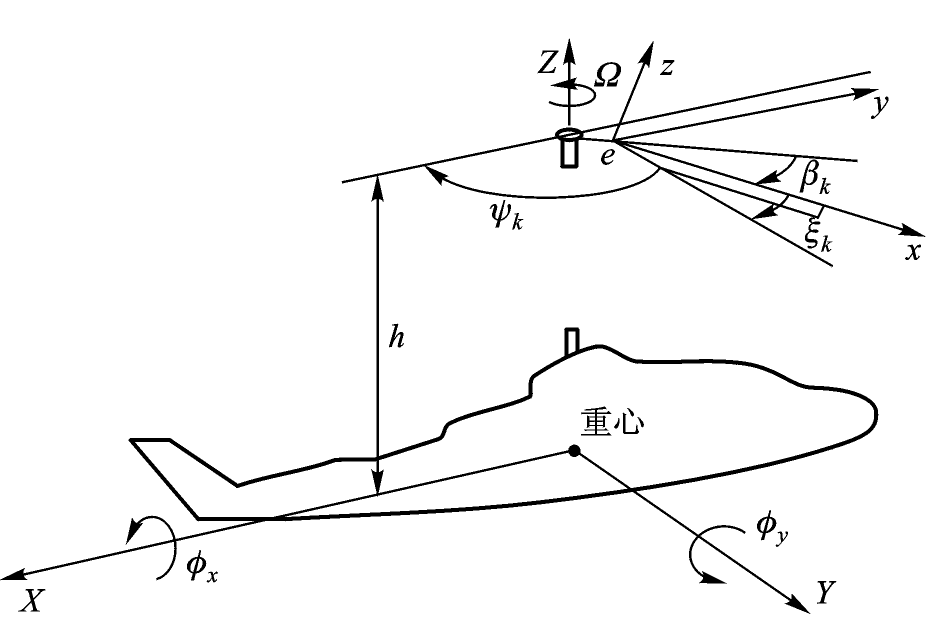
图 1 空中共振分析模型
Fig.1 Rotor and fuselage coordinate system
《1.3 变距/摆振几何耦合模型》
1.3 变距/摆振几何耦合模型
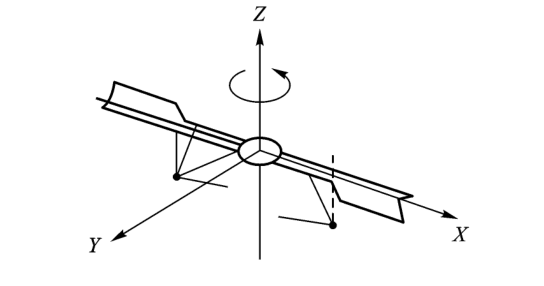
变距/摆振几何耦合机理是:由于旋翼操纵线系本身的布置特点,当桨叶摆振时,桨距随之发生变化,有时变距拉杆被设计为向桨叶后摆方向倾斜一定的角度,桨叶后摆引起的变距比变距拉杆垂直状态由桨叶后摆引起的附加变距要大。此时变距/挥舞耦合程度较大。笔者规定:桨叶后摆使桨距增大时,变距/摆振耦合系数为正,反之为负,见图 2。
《图 2 》

图 2 变距/摆振几何耦合
Fig.2 Geometry coupling of pitch/lag
经推导可以得到桨叶总距与变距/摆振耦合系数之间的关系为

其中 θ0 为桨叶总距角,桨叶后摆使桨距增大为正; 为桨叶后摆角,
为桨叶后摆角, 为第 k 片桨叶的摆振扰动运动。
为第 k 片桨叶的摆振扰动运动。
《2 平衡方程组的推导和处理》
2 平衡方程组的推导和处理
作用在桨叶挥舞方向上绕桨根的力矩有气动力矩  、惯性力矩
、惯性力矩  和根部约束力矩
和根部约束力矩  ,分析时引入挥舞/摆振结构耦合及预锥角、预摆角、预安装角等,则桨叶的挥舞平衡方程为
,分析时引入挥舞/摆振结构耦合及预锥角、预摆角、预安装角等,则桨叶的挥舞平衡方程为

同理可得到桨叶的摆振平衡方程为

由机体的力矩平衡关系可得机体的力矩平衡方程为

在机体非对称的情况下,令
式中  分别代表正向回转分量和反向回转分量,
分别代表正向回转分量和反向回转分量,  为特征值
为特征值  的共扼复数。经推导得耦合系统的复平衡方程组为
的共扼复数。经推导得耦合系统的复平衡方程组为

式中  ,其中
,其中  分别为
分别为  的共扼复数。
的共扼复数。
令  进行一系列线性变换处理可得
进行一系列线性变换处理可得

然后求得矩阵 H 的特征值和特征向量,所求的特征向量需对机体运动进行无量纲化。
《3 各自由度之间相互做功》
3 各自由度之间相互做功
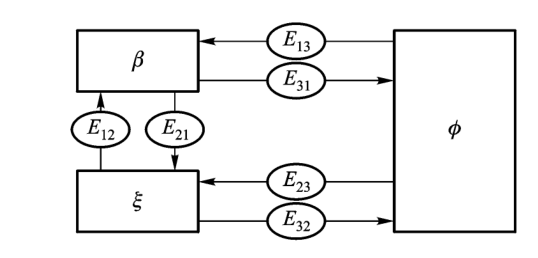
由所得的平衡方程组可进一步分析各自由度之间的相互作用,该相互作用主要体现于相互做功的情况:一个自由度对另一个自由度是做正功(输入能量、激励)还是做负功(消耗能量、阻滞)。若是做正功,就形成了系统不稳定(运动发散)的来源。
机体非对称情况下各自由度之间的做功如图3所示。Eij 表示第 j 个自由度对第 i 个自由度的做功。具体分析模型和公式推导见报告②和文献[7,8]。
② 张晓谷.直升机空中共振简化分析模型及公式( 直升机空中及地面共振研究之二).南航科技报告,NHJB-88-864,1988
《图 3 》

图 3 各自由度间相互做功
Fig.3 Mutual excitation of different degrees
《4 计算结果分析》
4 计算结果分析
根据以上推导的方程,以某型直升机的数据(实际情况),引入挥舞/摆振结构耦合、当量铰偏置量 e 和线性空气动力,假设机体纵横向质量惯矩不相等: ,计算
,计算  种情况,结果如图 4 所示,其中
种情况,结果如图 4 所示,其中 。
。
图中,LR 为摆振后退型模态,LA 为摆振前进型模态,FR 为挥舞后退型模态,FA 为挥舞前进型模态,GS 为机体模态。在 a,b,c 三种情况下,平衡方程组特征值实部和虚部随桨叶挥舞固有频率的变化曲线见图 4a 至图 4c。在 d,e,f 三种情况下,平衡方程组的特征值、特征向量及各自由度间的相互作用随旋翼转速变化曲线见图 4d至图 4f。对比 a,b,c三种情况平衡方程组的特征值变化曲线可知,在 b 情况下系统不稳定模态主要有摆振后退型模态 LR ,当引入负的变距/摆振耦合 a 情况后,LR ,LA 模态的特征值实部有所增加,系统稳定性降低。当引入正的变距/摆振耦合 c 情况后,LR 模态的特征值实部变为负数,系统变为绝对稳定。对比 d,e,f 三种情况平衡方程组的特征值变化曲线可知,当引入负的变距/摆振耦合 e 情况后,系统稳定性有所降低;当引入正的变距/摆振耦合后,系统在旋翼转速变化范围内变为绝对稳定。
《图 4》
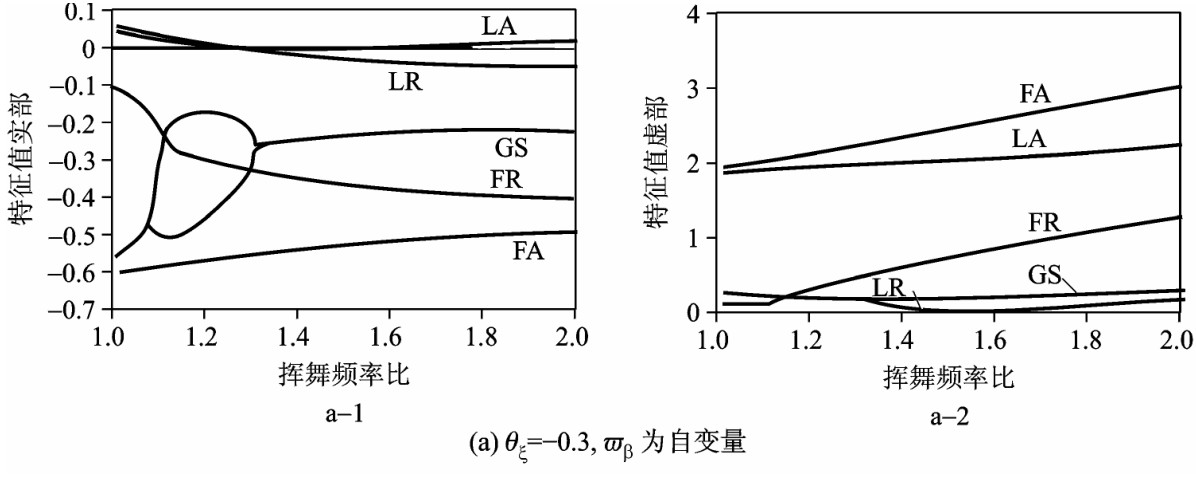
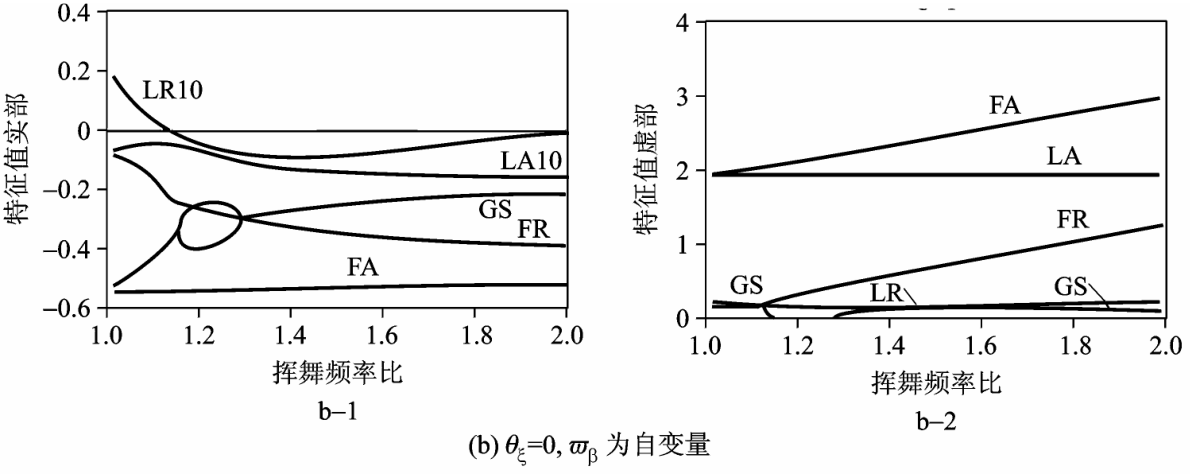
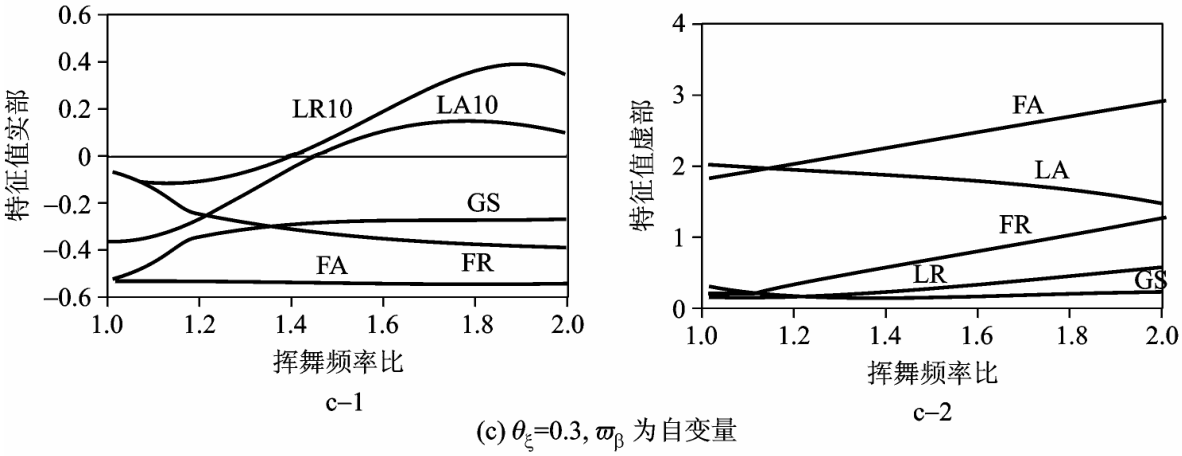


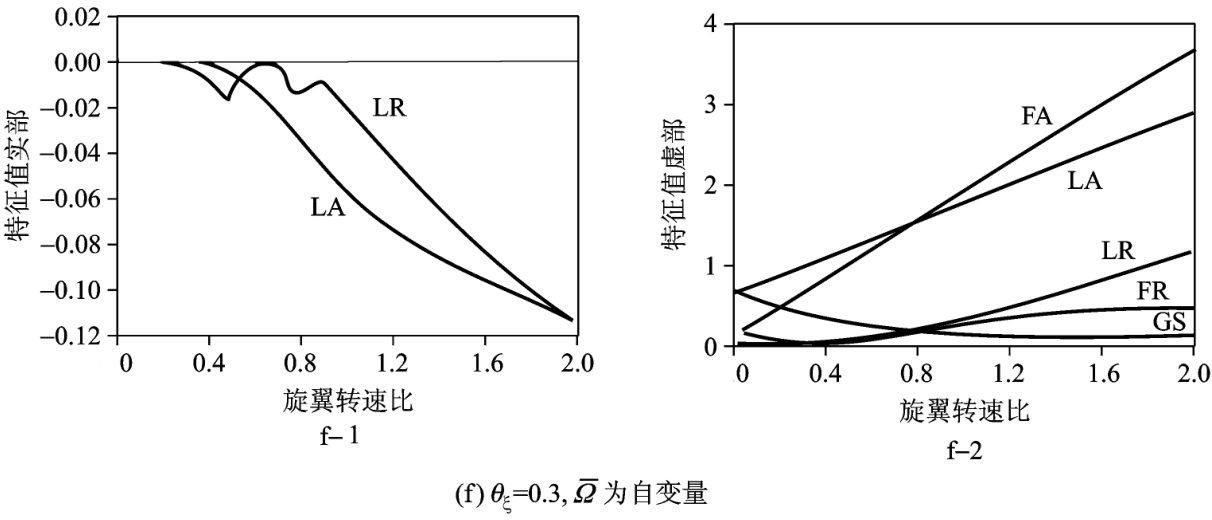
图 4 计算结果对比
Fig.4 Result of different calculation
《5 结论》
5 结论
综合以上分析和研究,可以得出:正的变距/摆振耦合可以抑制直升机旋翼/机体耦合系统的动不稳定性;负的变距/摆振耦合可以增大直升机旋翼/机体耦合系统的动不稳定性。在同时引入挥舞/摆振耦合和正的变距/摆振耦合时,直升机旋翼/机体耦合系统变为绝对稳定。系统的动不稳定主要为摆振后退型模态和摆振前进型模态。这主要是由挥舞和摆振两个自由度之间相互作用的变化引起的,其物理解释为,正的变距/摆振耦合使系统模态阻尼增加,低阻尼的摆振运动向高阻尼的挥舞运动输入能量增加,从而提高了系统的动稳定性。反之,当引入负的变距/摆振耦合后,结果正好相反。
符号表
e 为无因次当量铰偏置量
 分别为对应于机体第 i 阶模态的机体绕瞬心横向和纵向的当量质量惯量
分别为对应于机体第 i 阶模态的机体绕瞬心横向和纵向的当量质量惯量
 分别为对应于机体第i 阶模态的横向和纵向当量阻尼
分别为对应于机体第i 阶模态的横向和纵向当量阻尼
 分别为对应于机体第i 阶模态的横向和纵向当量刚度
分别为对应于机体第i 阶模态的横向和纵向当量刚度
 分别为
分别为 桨叶的挥舞角、总矩角
桨叶的挥舞角、总矩角
 分别为
分别为
 为变距摆振耦合系数
为变距摆振耦合系数
 为桨叶的当量基阶挥舞固有频率
为桨叶的当量基阶挥舞固有频率
 为桨叶的当量基阶摆振固有频率
为桨叶的当量基阶摆振固有频率
 为旋翼的当量转速
为旋翼的当量转速
 机体绕重心的滚转角及俯仰角
机体绕重心的滚转角及俯仰角
 为对变量求共轭
为对变量求共轭











 京公网安备 11010502051620号
京公网安备 11010502051620号




