





《1 引言》
1 引言
进行结构优化研究的目的, 就是要以最小的代价换取最大的收益。就现有优化研究的工作而言, 都在向着实现结构配置最合理和最经济的方向努力。但当前大多数工作基本上是以局部目标为目的, 还没有一个有效的、面向全局的、全过程的结构优化方案, 这个问题吕大刚、王光远曾经论述过
之所以提到“智能”, 是因为笔者致力于将诸如模糊、混沌、神经网络等当前比较先进的、在计算原理上带有智能色彩的理论应用到“结构优化”的方案中, 使整个优化过程以更贴近自然原理的方式向目标靠近, 最终达到一个合乎规律的结果。
本系统的原理是:先运用模糊推理的方法, 根据已存在的一些结构中所蕴藏的结构构成机理, 推导所需结构的基结构形式;再对基结构进行初始形状改造, 使其成为可以进行优化计算的实际结构;然后运用脉冲暂态混沌神经网络对这个结构的布局优化模型进行寻优计算, 最后得到布局优化解。
《2 桁架结构智能布局优化系统》
2 桁架结构智能布局优化系统
《2.1桁架结构智能布局优化系统组成》
2.1桁架结构智能布局优化系统组成
桁架结构智能布局优化系统从基结构建立到布局优化计算输出最终结果, 由5部分组成 (图1) :数据输入模块;基结构自动生成模块;初始形状生成模块;布局寻优模块;输出模块。
数据输入模块主要是输入已知条件及系统所需参数, 如结构的选型参数、材料性态参数、约束条件以及寻优时神经网络所需要的一些参数, 等等。
输出模块输出的是优化后的桁架结构形式及计算所求得的值等, 如优化后结构的拓扑形状及杆件的面积变量、形状变量和应力水平等。
《图1》

Fig.1 The flow chart of intelligent layout optimization system of truss structures
基结构自动生成模块的方法和原理笔者在文献
但基结构自动生成模块生成的基结构是拓扑意义上的基结构, 各层面间距离全部看作归一化的单位距离, 因此要在初始形状生成模块中对距离赋予实际的值。所以, 初始形状生成模块的作用就是将各节点间距离赋值, 使一个只具有节点相对距离含义的基结构变成一个具体的实际桁架结构, 以便进行后面的优化计算。
布局寻优模块主要原理和方法在文献
求:A, X
(1a)
式 (1) 中: (1a) 为优化目标函数; (1b) 为应力约束; (1c) 为位移约束; (1d) 为拓扑变量表达式;αi为拓扑优化变量 (其取值范围是αi∈{0, 1}, 它的含义是当αi取为0时, 表示第i根杆不存在, 当αi等于1时, 代表第i根杆存在) ;ε0为阀值 (是一个很小的正数, 当杆件面积Ai小于ε0时, αi为0, 否则为1) ;ε为sigmoid函数的参数 (当它取值很大时sigmoid函数的函数值在自变量≤0时为0, >0时为1) ;Ai为第i根杆的面积;X为优化模型的形状优化变量 (xj, yj) , 即节点坐标;li为第i根杆的长度;ρi为第i根杆的密度;m为结构的杆件总数;ND为位移约束总数。
这个模型的主要特点是用面积变量的sigmoid函数形式表达了拓扑变量的含义
本模块主要应用脉冲暂态混沌神经网络对以上的布局优化模型进行布局寻优, 同时调节形状变量和面积变量, 可以解决优化过程中杆件的自动删除和恢复等问题。自动删除是通过面积变量优化结果自动导致拓扑变量的转换而达到的, 自动恢复则是因为当寻优系统进入混沌状态时, 某些被删除的杆件面积跳到非0, 从而使相应杆件自动恢复而达到的。经过以上过程以寻得布局优化的解。
《2.2桁架结构智能布局优化系统特点》
2.2桁架结构智能布局优化系统特点
桁架结构智能布局优化系统以桁架为研究对象, 以结构布局优化为目的, 以结构重量为优化目标函数并考虑应力约束和位移约束, 具有以下特点:
1) 从基结构建立开始, 系统含盖整个优化全过程;
2) 应用模糊、混沌、神经网络等具有智能色彩的计算原理;
3) 优化模型包含面积和形状两类变量, 但实现拓扑、形状、面积优化三种功能;
4) 系统分模块构造, 各模块独立且协调工作, 整个系统具有自适应性。
《3 算例》
3 算例
为证明桁架结构智能布局优化系统的实用性, 给出了一个优化实例。发现优化后各杆件内的应力基本接近于许用应力。同时, 为作比较, 计算了在相同结构形式下如果各杆件取相同截面积时的杆件内的应力, 发现了布局优化的所得结果的合理性, 举例如下:
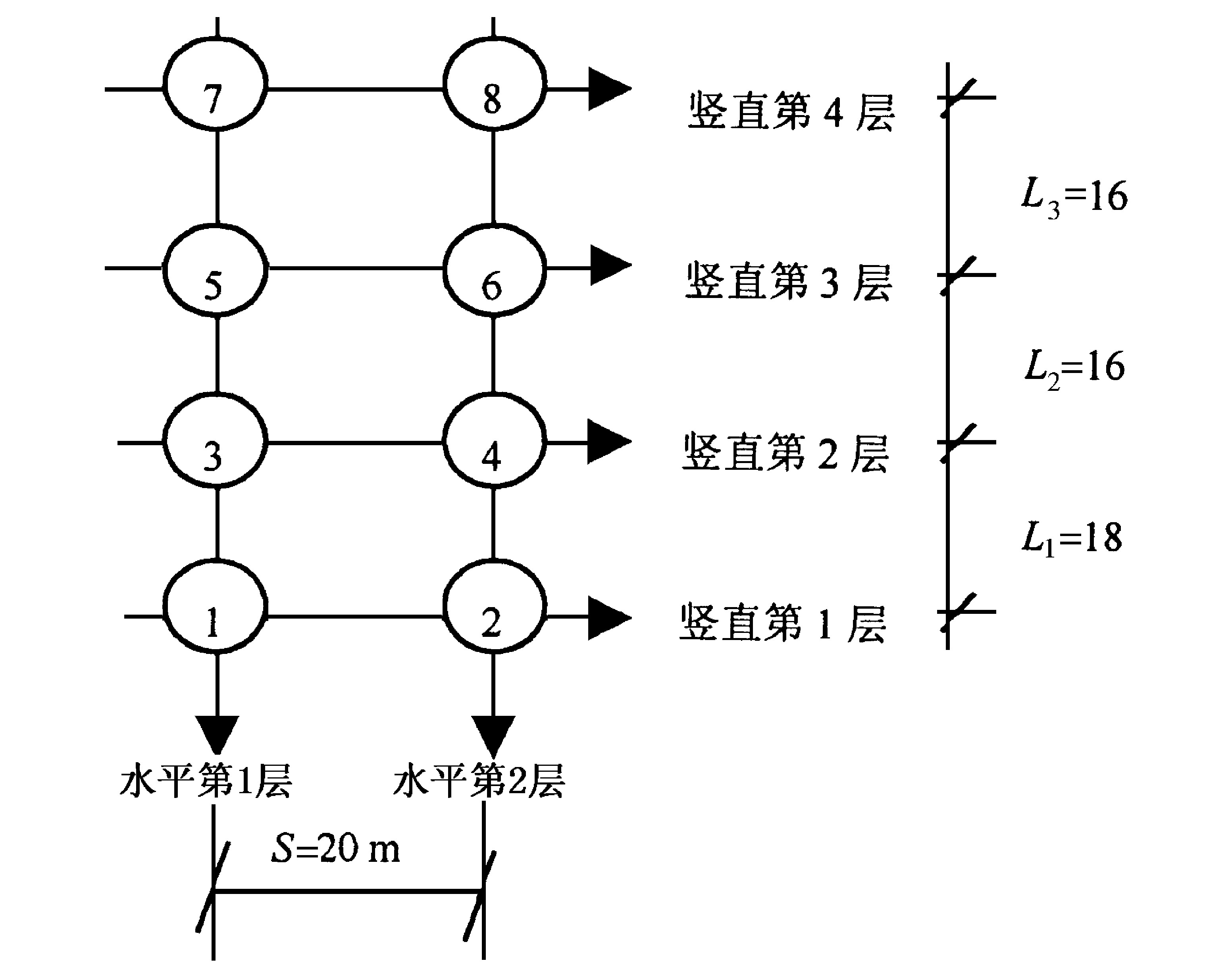
结构选型:具有8个节点, 水平2个层面, 竖直4个层面, 如图2所示。
结构参数:水平层面间距离S=20 m, 竖直层面间距离L1=18 m, L2=16 m, L3=16 m。
材料性态参数:弹性模量E=210 GPa, 许用应力
结构在节点处受力:P1=187 kN, P2=1 190 kN, P3=2 400 kN, P4=875.5 kN。
约束条件:为满足功能要求各节点的纵坐标不变, 只优化节点的横向坐标。
经过基结构自动生成模块得到图3的拓扑基结构形式 (图3和图4中带括号的标号为杆件号, 不带括号的标号为节点号) , 注意此时的层面间距离是拓扑意义上的归一化单位距离, 不具有绝对数值意义。图4是经过初始形状模块重整后的形式, 这时层面间的距离是实际真实距离。图5是结构受力简图。
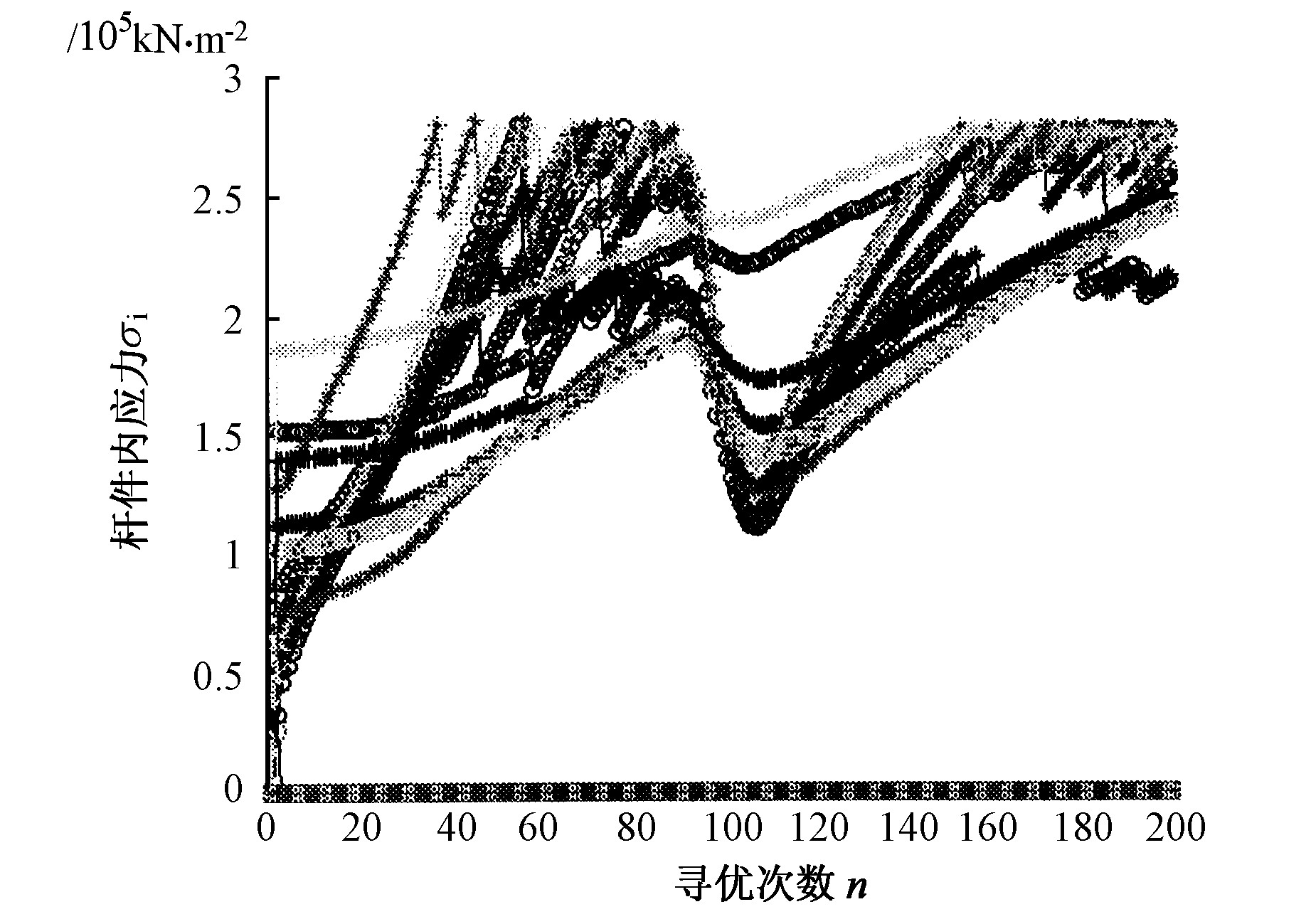
经过布局寻优模块后得到优化结果, 再由输出模块输出显示。图6和图7是布局寻优过程中目标函数及杆件内应力变化相图。图8是经过桁架结构智能布局系统优化后所得的优化结构形式。
优化结果的目标函数W=44.2 t。优化后各杆件内的应力水平如表1所示。计算结果表明, 优化后部分杆件内应力接近许用应力。这充分说明, 杆件的面积被充分利用, 达到了结构优化的效果。此时的结构形状有了很大变化, 且拓扑形式也与原基结构有很大差异, 删除了7根杆件。为作比较, 对相同形状但在拓扑上恢复被删除的7根杆做了计算, 假设此时各杆件取相同截面积 A1—21=1, 这里的1看作抽象后的归一化单位, 其他条件不变, 则各杆中的应力从小到大排序见表2。
Table 1 Value of stress MPa
《表1》
σ1 |
σ2 | σ3 | σ4 | σ5 | σ6 | σ7 | σ8 | σ9 | σ10 | σ11 | σ12 | σ13 | σ14 | σ15 | σ16 | σ17 | σ18 | σ19 | σ20 | σ21 |
251 |
192 | 226 | 208 | 210 | 227 | 199 | 265 | 182 | 241 | 0 | 0 | 240 | 194 | 168 | 0 | 0 | 174 | 0 | 0 | 0 |
Table 2 Pole order according to the value of stress with same area
《表2》
次序号 |
1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | 11 | 12 | 13 | 14 | 15 | 16 | 17 | 18 | 19 | 20 | 21 |
杆件号 |
21 | 20 | 19 | 16 | 17 | 11 | 12 | 10 | 13 | 4 | 3 | 5 | 6 | 2 | 7 | 15 | 18 | 9 | 14 | 1 | 8 |
经对比不难发现, 布局优化结果所删除的杆件是: 11, 12, 16, 17, 19, 20及21共7 根杆, 即排在表2中的前7位, 说明它们对结构承重所做的贡献最小, 因此, 将其删除是符合受力规律的。所以本优化系统在原理上是合理的, 可以得出比较可靠的优化结果。
《4 结论》
4 结论
这里所构造的桁架结构智能布局优化系统, 面对桁架结构布局优化全过程, 应用了模糊、混沌、神经网络等理论, 由5个模块组成, 具有智能、自适应的特点, 在确定了结构选型的情况下, 可以自动完成从基结构的智能自动建立到结构布局寻优的完整过程。通过算例及对比算例的分析表明, 本文的桁架结构智能布局优化系统原理是合理的, 性能是可靠的, 可以得到比较满意的结果。
《图9》












 京公网安备 11010502051620号
京公网安备 11010502051620号




