《1. 引言》
1. 引言
微震是岩体变形、裂纹开裂以及扩展过程的伴生现象,是震级小于三级的地震,相比高震级天然地震,其能量弱、监测信号信噪比低。微震监测是对微震现象时空特征的记录[1]。
从20世纪60年代开始,南非和美国的科研人员就开始开发、利用微震技术进行冲击地压、岩爆的监测。20世纪80年代中期开始,加拿大超过20个具有冲击倾向性的矿井,为实现日常监测严重冲击地压灾害的目的,安装了微震监测系统[2]。1998年,Luo和Hatherly[3]用微震技术监测了两个长臂开采矿井,研究了诱发顶底板破裂的模型。1998年,Rutledge等[4]在美国得克萨斯州棉花谷成功进行了水力压裂实验。典型的矿山分站式微震监测系统结构如图1所示。
《图1》
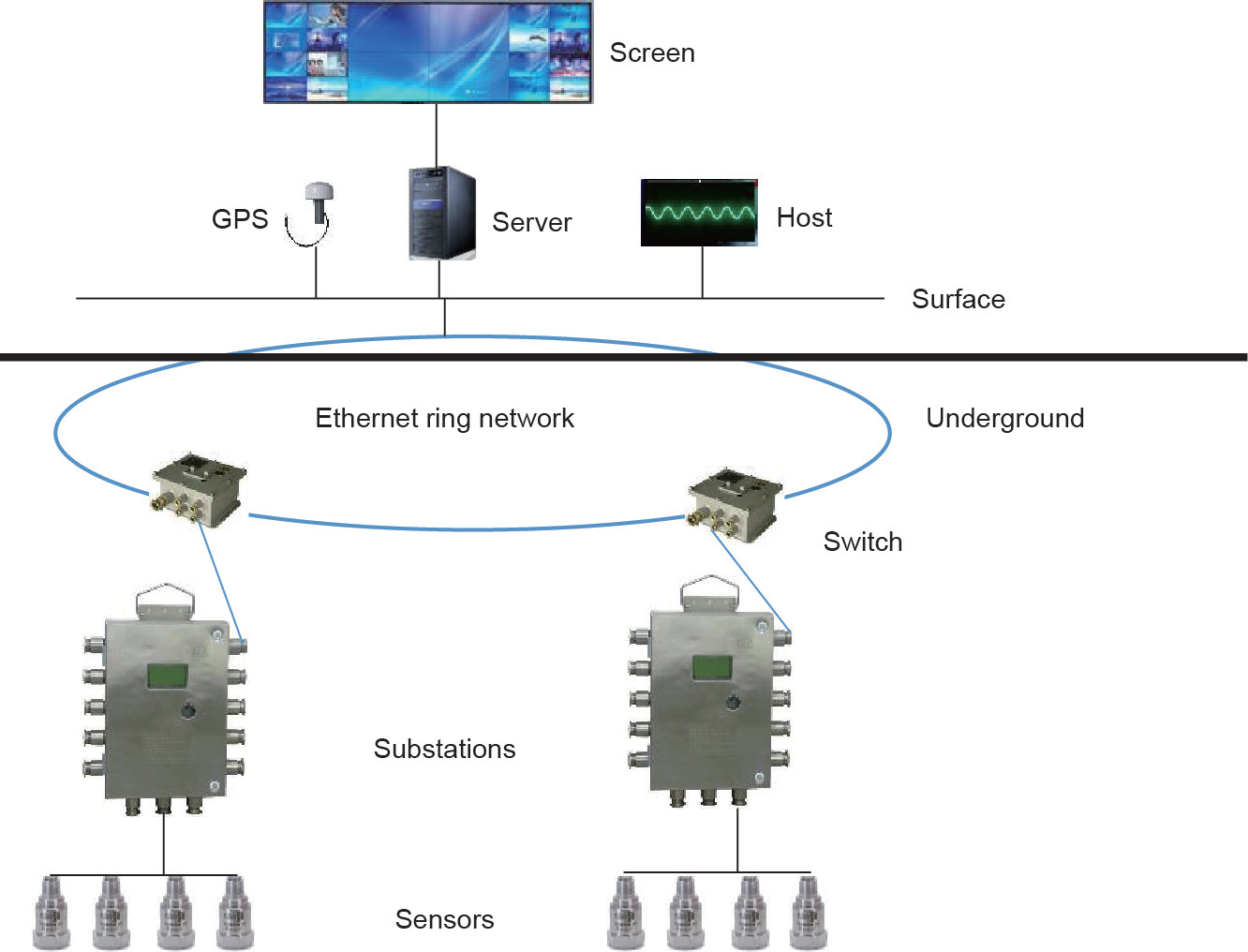
图1. 矿山微震监测系统结构。
矿山微震震源定位是一项受多种因素影响的十分复杂的工作,通过震源定位可以确定震源在三维空间中的微震及发震时刻。震源定位是微震监测技术的核心要素,微震震源定位的准确性关系到微震技术的应用效果。
微震震相以体波为主,在矿山的微震事件中,可以被认为是在没有边界的均匀无限介质中传播,主要关注P波和S波,它们可以在三维空间中向任何方向传播。微震信号与天然地震信号具有类似的震源机制和信号特征,因此可以借鉴天然地震学中震源定位方法进行微震震源定位研究。但是地震震源定位中利用的三轴传感器定位、几何作图法定位(包括石川法、虚拟法、交切法和中线法)等方法就不宜应用到矿山微震震源定位中。三轴传感器定位是利用单个的三轴传感器监测的信号进行震源定位。在测点少的情况下可以应用于地震震源定位。优点是成本低,提供了测点处的应力波特征。但其缺点是信号振幅受传感器材料结构和属性影响巨大[5]。石川法是已知地震波传播速度V及直达P波和S波初始到时 ,测定震源位置的一种方法[6]。未知传播速度或走时表测定近震时空参数的常用方法主要有:和达法、高桥法、半几何法。其中和达法是利用4个以上台站的直达S波和P波初始到时差
,测定震源位置的一种方法[6]。未知传播速度或走时表测定近震时空参数的常用方法主要有:和达法、高桥法、半几何法。其中和达法是利用4个以上台站的直达S波和P波初始到时差 ,测定震源位置的震源轨迹法。
,测定震源位置的震源轨迹法。
上述地震震源定位方法都需要同时用到P波到时tP和S波到时tS。而矿山微震监测中的震源与传感器间距离较近,微震监测到的信号S波大多不明显。直达S波易受到P波后续尾波的干扰。当信号能量较弱时,P波信号可能被井下各种噪声淹没,只能接收到能量较强的S波信号,因而在矿山微震震源定位中,基于P、S波的震源定位方法受到了限制。
基于到时的震源定位方法可以应用到地震、矿山微震或声发射震源定位中。2000年以前大量的经典震源定位方法被提出,1912年Geiger提出的Geiger迭代定位算法,1928年Inglada提出的Inglada线性非迭代震源定位方法,2000年Waldhauser和Ellsworth提出的双差定位法,都是针对地震震源定位提出的。20世纪60年代开始,随着微震监测技术的发展,针对微震监测的震源定位方法也被提出,如美国矿业局(USBM)研究人员于20世纪70年代初期提出的USBM震源定位方法。20世纪80年代末单纯形法被引入到微震震源定位中[5,7]。到目前为止大部分定位方法仍在矿山微震震源定位中应用。
基于到时的经典定位方法易受到时拾取精度和波速模型影响,进而出现定位结果精度低的问题。进入21世纪后,上述经典方法的改良或多种方法的优化组合应用被相继提出。同时出现了以逆时成像、干涉成像为代表的新的震源定位方法,通过优化和改造有望应用到矿山微震震源定位中。
本文通过分析2000年以来矿山微震震源定位方法的研究进展,以期找出减小定位误差、增加定位结果可靠性和准确度的关键因素,根据监测目的及各个监测系统的特征,为矿山震源定位找出最优的定位方法,最终实现矿山微震事件的高精度定位。
《2. 矿山微震震源定位研究进展》
2. 矿山微震震源定位研究进展
最小二乘法[8]、牛顿迭代法[9]等先后被应用于矿山微震震源定位中。由于微震信号能量弱、信噪比低,在震源定位中存在初至拾取不准确、定位效率低等问题。针对上述问题,2000年以来基于到时的传统矿山微震震源定位方法被研究人员不断优化和完善,在矿山微震震源定位中涉及的有代表性的方法主要有如下几种。
《2.1. 线性方法和Geiger方法联合定位》
2.1. 线性方法和Geiger方法联合定位
林峰等[10]提出了线性定位和Geiger定位相结合的联合定位方法。用线性定位进行初步定位,再以线性定位解作为Geiger定位方法的迭代初值进行求解定位。经现场实测对比,提高了震源定位精度。
《2.2. 最小二乘法和Geiger方法联合定位》
2.2. 最小二乘法和Geiger方法联合定位
康玉梅等[11]利用最小二乘法提供初始迭代点,然后用Geiger算法迭代计算震源位置。将最小二乘法和Geiger算法联合应用,提高了震源求解速度。
《2.3. 联合微震事件定位》
2.3. 联合微震事件定位
Poliannikov等[12]提出了利用不确定的波速并且同步联合多个微震事件进行定位,相比于传统的单事件独立定位具有明显的优势。联合定位方法可以同步更新所有的事件定位结果。在波速不确定和信号噪声存在的前提下,提出的联合震源定位框架,大大提高了裂缝尺寸估计误差。
《2.3. 联合微震事件定位》
2.4. 相对定位法优化
Got和Okubo[13]提出了主事件定位法的修正算法,速度模型对定位精度的影响大大降低,仅仅留下一个速度模型计算旅行时差。在已经知道震源参数的事件与未知事件之间建立了主、从关系,在主事件周围建立走时圈。从属事件完全避免了到时计算。Grechka等[14]提出了多个主事件的相对定位方法。根据构建的分层速度模型,对同一个待定位事件,给不同的主事件赋予不同的权重,最终实现利用同层靠近待定位事件的主事件进行定位。
Castellanos和Van der Baan[15]提出了通过互相关法探测波形相似的微震事件,波形相似性代表了合适的权重系数。对发生在同一震源区域、具有相同震源机制的、一个月内的微震事件进行重定位,利用相对定位方法——双差定位法,对震源定位精度影响巨大的到时拾取误差,通过互相关法进行校正[16]。通过均质速度模型假设简化了模型构建,将基于事件相似度的权重代入双差计算公式,与基于事件对间隔距离的权重系数的Waldhauser等[16]提出的原始的双差算法进行对比。
Chen等[17]提出了一种新的层析成像的方法,添加了后向角限制双差地震层析成像,与传统的网格搜索算法相比定位精度大大提高。
《2.5. 无需预先测速的定位方法》
2.5. 无需预先测速的定位方法
董陇军等[18]提出了三种无需预先测量速度的震源定位方法,经过现场数据对比显示到时差法具有更高的精度,算法稳定。只需要传感器坐标及时间差即可。到时差法把波速作为一个未知量与震源坐标一同求解,同时不需要对震源发震时间进行拟合。则(x0, y0, z0, c)应使得Q(x0, y0, z0, c)达到最小,即

式中,(x0, y0, z0)为震源坐标;c为波速;i、j为传感器编号;n为传感器的总量;Lic为第i个传感器到震源的距离;Ljc为第j个传感器到震源的距离; 为ti和tj到时差回归值;ti是第i个传感器的到时;tj是第j个传感器的到时。
为ti和tj到时差回归值;ti是第i个传感器的到时;tj是第j个传感器的到时。
但是震源位置和波速耦合在一起反演时,对以微震震源位置为主要目的的反演是不利的。
《2.6. 无需拾取初至到时的定位方法》
2.6. 无需拾取初至到时的定位方法
震源扫描算法(SSA)的思路是在整个时间、空间范围内寻找可能发生的微震震源。2004年,Kao和Shan[19]提出了震源扫描算法,这是一种新的可以对震源分布进行成像的方法,利用监测数据的振幅和到时等波形数据,通过系统的扫描某个假设的震源位置和起始时刻,找出整个序列分布。不用精确拾取到时和计算理论地震图的情况下达到比较理想的定位效果。
何惺华[20]提出了利用井下多级三分量检波器资料反演微震源的方法。首先要确定检波器方位角,在三维空间逐点对所有测点计算直达波旅行时,并通过任意时刻沿直达纵波初至后给定时窗内的三个分量的能量和极大值,进行震源位置反演。本方法无需拾取到时,解决了多解的问题,但是受波速影响较大。
Kinscher等[21]提出了两种概率统计方法进行震源定位,利用强衰减效应和高频条件下显著的极化纵波能量。
上述算法采用联合、参数优化、舍弃某一参数等技术对传统的定位方法进行优化。但系统性能、测点布置、波速模型或初至拾取误差对每种方法都会产生影响,在监测区域地质条件复杂、基础数据无法精确获取的前提下,上述方法仍然会产生巨大的定位误差。
《3. 矿山微震震源定位影响因素》
3. 矿山微震震源定位影响因素
矿山微震震源定位方法通常应用在非常复杂的环境,震源定位精度受检波器布置、到时拾取精度和速度模型等因素影响[22]。地下岩层分布的不可预知性、岩石的各向异性、岩层层间波速突变等因素导致精确速度模型建立异常困难,震动波在传播过程中的随机性和不确定性,其传播过程解释仍需要完善。同时微震信号是宽频信号,低信噪比的监测信号也难以用滤波的方法滤除噪声,这些问题不解决,涉及波速和走时的反演定位方法就难以实现高精度定位。下面对震源定位的影响因素及其应对措施进行论述。
《3.1. 检波器布置》
3.1. 检波器布置
微震检波器空间分布是非常关键的一个环节。不同的监测点布置方案对定位精度影响不同。研究微震检波器布置方案是微震监测技术的重要研究内容之一,可提高震源定位的精度和可靠性。
微震检波器布置的优化,也是要参考地震台网优化布置。地震台网优化布置理论有:基于蒙特卡洛算法计算台网监测能力[23]及基于D值和C值最优设计理论设计微震台网[24]。
巩思园等[25]利用D值优化理论设计了微震台网优化布置方案,几何D值优化准则采用遗传算法可以快速、低成本地确定煤矿微震台网布设方案。
D值理论认为检波器测站位置的优化取决于震源参数协方差矩阵,高永涛等[26]基于D值理论,引入微震事件发生概率、监测区域重要性、台网布设可行性等因子构建目标函数,建立了某磷矿微震监测台网布设方案。某一工作面微震检波器布置如图2所示。
《图2》
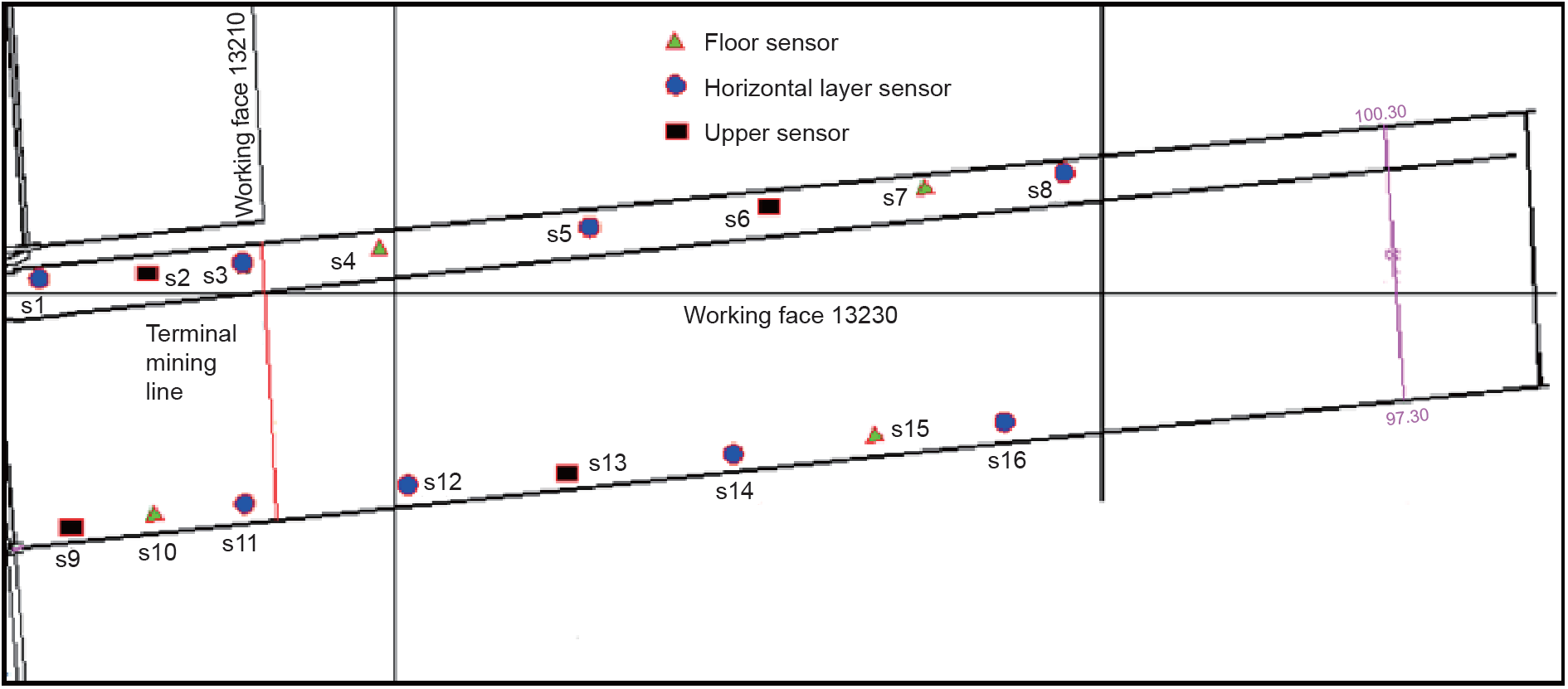
图2. 矿井工作面微震检波器布置。
《3.2. 初至到时拾取》
3.2. 初至到时拾取
由于矿山微震信号辐射能量弱,且矿山地下空间噪声大、信号信噪比低,造成到时拾取误差大大增加。观测值中出现出格的数据时,将出现较大的误差,Anderson[27]首先采用把出格数据丢弃的方法进行数据处理,以提高解的精度。
基于Allen自动拾取算法(短时窗平均值与长时窗平均值之比,STA/LTA)的初始到时自动拾取如图3所示。李贤等[28]对Allen自动拾取算法进行改进,引入Bear算法的加权因子和特征函数,提出了适合于工程尺度的微震信号及P波初至自动识别AB算法。P波初至拾取准确率有所提高,但也仅达到73.51%。
《图3》
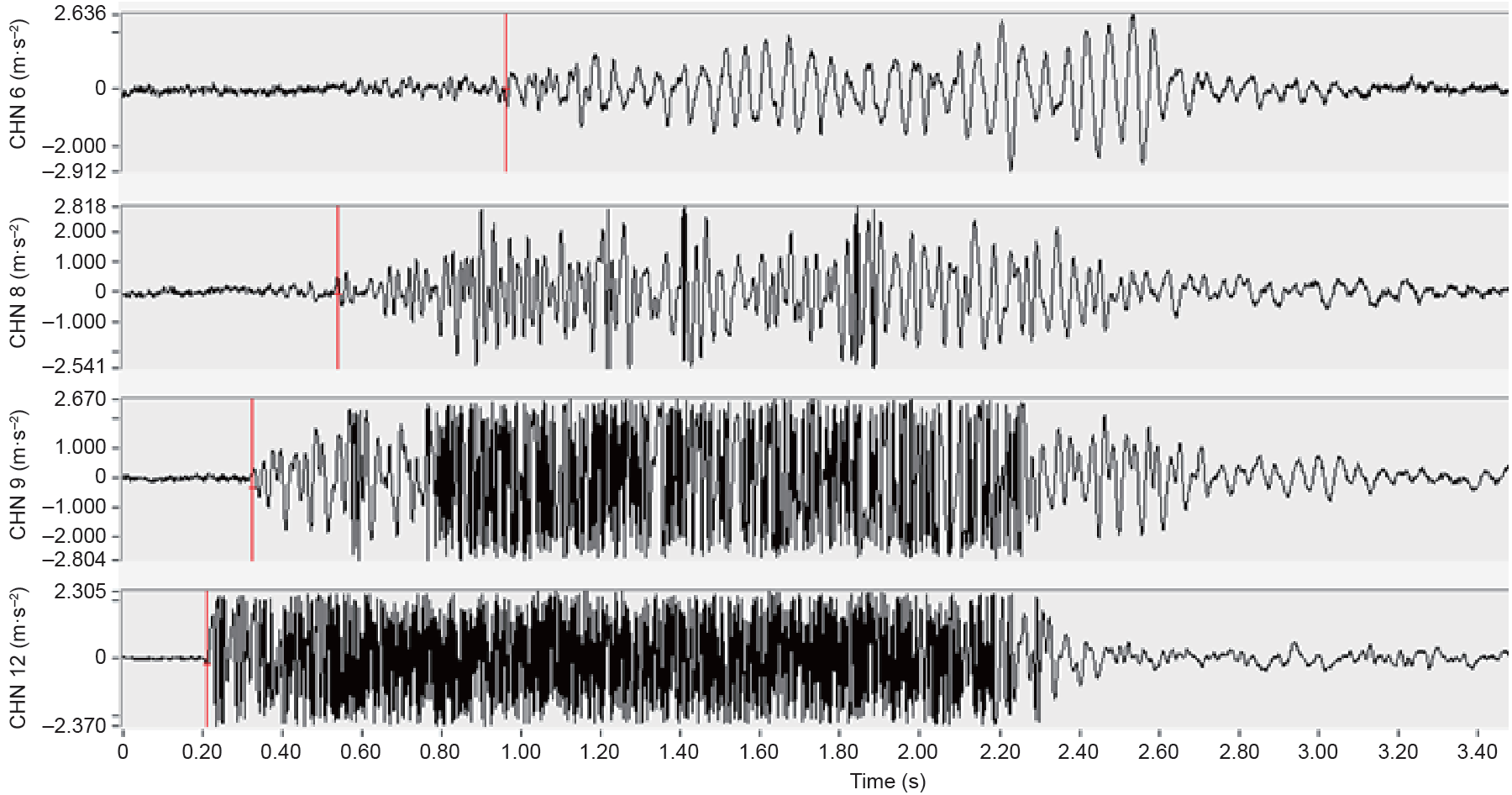
图3. 不同噪声水平初至到时自动拾取结果。
李夕兵等[29]提出了虚拟场优化法以克服到时拾取中的较大拾取误差,模拟和现场测试表明本方法适用于局部微震定位和声源定位。
宋维琪等[30]结合长短时窗能量比法与偏振分析,设计针对微震监测数据的有效事件自动拾取方法。先对微震记录进行有效事件的识别,然后对识别的事件直接进行叠加定位。
《3.3. 波速模型》
3.3. 波速模型
影响微震定位精度的主要因素是岩体速度模型假设。通常假设岩体整体具有相同的弹性模量属性,因而采用单一速度模型。实际岩体速度模型的不确定性,且忽略介质各向异性将导致系统性的不可接受的震源定位误差。因而对微震波的传播不能简单地只采用直达波的假设。
通过设计科学的层状波速模型,模拟直达波和折射波传播,采用射线追踪算法,对微震事件进行处理。Belayouni等[31]设计了射线追踪算法计算直达波、折射波和反射波的传播时间和偏振效应,并假设了层状波速模型进行震源定位。然后把算法应用到美国棉花谷实时数据集处理中,因为高速度对比在能量较强的事件中可以看到反射波。应用直达波和反射波与只利用直达波相比定位结果的不确定性明显降低,提高了定位精度。
单一速度模型不能满足对矿山工程现场复杂岩体的处理,必须要根据工程现场建立复杂岩体速度模型。郭亮等[32]针对实际工程中带有空洞和速度分区的复杂岩体,引入了多模板快速行进法(MSFM)进行初至波走时计算。由于MSFM算法计算得到了从原点到模型中其余节点的初至走时,利用Dijkstra最短路径思想可以给出计算点始末端的射线路径,结果表明MSFM算法作为走时正演方法具有很好的应用价值。
Collins等[33]提出了建立多重复杂形状的拥有独立属性的地质单元速度模型,该速度模型可以设置成包含充填空气、矿井水或回填泥浆等材料的空间。Van Dok等[34]提出微震监测应该测量速度各向异性参数,这些参数应该包含在最终的速度模型中,以便提高震源定位精度。Michael等[35]提出利用各向异性速度模型来提高微震震源定位精度。Eisner等[36]研究发现,地面微震监测中存在的最大的不确定性是仅用单一震相确定的震源垂向位置,而水平位置估计对速度模型不敏感,水平定位结果鲁棒性较强。
速度模型5%的误差就将引起很大的定位误差。各向同性速度模型应用到实际的各向异性构造将导致不切实际的速度值。因此构建速度模型必须考虑岩体各向异性,而且矿山微震监测区域的岩层结构往往受采动影响较大,影响微震到时和传播方向,必须考虑其时空变化。因而要根据微震数据评估速度模型。Fish[37]利用图像域波形层析成像方法更新速度模型。
Gesret等[38]提出了一个新的贝叶斯公式,把正确的速度模型与地震定位概率公式相结合,把速度模型不确定性在概率框架下传播到震源定位中,可以获得更可靠的震源位置。
Ge和Kaiser[22]提出了基于事件的动态速度模型,根据拾取到时判别P波、S波和异常波,判别准则是各通道接收到信号的先后顺序和到时差。利用到时差值分析,两传感器的位置确定后,两传感器的观测到时必须满足:

式中,ti, tj分别为两个传感器的拾取到时;2cij为两个传感器之间的距离;vP为P波波速。若某一通道的拾取到时满足上式,则此通道的信号初至必是P波,否则就是S波或异常波。通常把ti取为最先接收到信号的通道对应拾取到时[39]。
《4. 展望》
4. 展望
虽然通过技术手段可以努力提高初始到时拾取精度,应尽可能建立科学的波速模型,但是大多数情况下,受限于各向异性岩层介质、监测仪器的性能等因素,到时拾取误差和波速模型误差依然十分巨大,甚至导致基于到时的矿山微震震源定位方法得到的结果无法使用。因此,发展新方法来提高矿山微震震源定位精度势在必行。
《4.1. 逆时成像》
4.1. 逆时成像
许力生等[40]提出了基于波动方程而不是基于走时的逆时成像法定位方法。逆时成像从波动方程出发,对波场进行分解,避免了用传统的走时,根据S波的能量判断某个时刻能量最高,则该时刻即代表微震事件发生时刻,从而确定震源的空间位置[41]。设观测点的数目为M,每个观测点分量为N,最多为3个分量,定义:

式中,xm为监测点坐标向量;tm为到时;E为信号能量,仅当 和
和 时E取最大值Emax,同时求解得到震源位置
时E取最大值Emax,同时求解得到震源位置 和发震时刻
和发震时刻 。
。
利用求Emax确定震源参数的过程,即让弹性波从监测点返回到震源中心位置的过程,此类技术即逆时成像技术。
逆时成像技术需要进一步提高计算效率,以实现更广泛的应用[42]。逆时成像不需要震相识别和到时拾取,对震源探测及自动同步定位是一种实用的方法。Hansen和Schmandt[43]采用逆时成像技术对火山微震活动性进行了自动检测和定位。Xue等[44]利用GPU直连特性加速逆时成像算法,比常规GPU设备提高了30%的计算速度。
震源逆时成像利用全部波形信息,因而成像结果除了能进行地震定位,还包含了震源机制的相关信息。逆时成像技术的优点在于消除非线性问题线性化引起的误差、提升观测到时的客观性和准确性以及克服个别出格数据对解的稳定性的影响,但是,对于速度模型的影响无能为力[45]。
而事件中的低信噪比信号、干扰信号和背景噪声等都将影响到时的高精度拾取,而没有到时的精确拾取,传统依赖到时的震源定位算法就无法实现震源高精度自动定位。吴建光等[45]对长短时窗分析得到的微震事件及到时进行再次验证分析,以区别出微震事件和干扰信号。采用振幅叠加方法,并采用逆时偏移的方法对微震事件进行定位,无需精确拾取初至。通过多道叠加,提高信号强度。振幅叠加公式为

式中,E(xi, yi, zi)为叠加能量总和;i为待扫描目标区域体元编号;(xi, yi, zi)为i体元的中心坐标;S为第i个体元到第k个检波器在j时刻的震幅大小;T为时窗长度;M为测点总数。
《4.2. 被动时间反转镜法》
4.2. 被动时间反转镜法
时间反转镜是一种阵列信号处理技术,它可以把从波源处发射来的波(电磁波或机械波均可)重新聚焦到波源处。通过人工模拟反转波在介质中传播的过程,可以正演得到反转波在空间的聚焦位置。这种方法称为时间反转镜法。
主动时间反转镜震源定位,是已知发射震源,通过测量传播时间,确定目标距离发射源的距离。被动时间反转镜法,是与主动时间反转镜对应的概念,是根据监测数据反演震源参数的过程。声场互易性原理是时间反转镜技术的物理基础。时间反转镜法尚处于起步研究阶段,相关研究成果较少。马敬广[46]研究了基于时间反转镜的目标被动定位技术,开展了矢量水听器时间反转镜被动定位技术研究,并进行了技术初步应用研究。
《4.3. 相对干涉成像法》
4.3. 相对干涉成像法
利用微震主事件相对定位法,结合地震干涉成像技术,李磊等[47]提出了相对干涉成像法。该方法可以应用到初始到时不清晰的监测数据,并对速度模型依赖性较低。提取不同事件到相同检波器的走时差和震幅信息进行干涉成像。相对干涉成像的计算公式为

式中, 为主事件与目标事件的互相关道集包络;m为主事件位置向量;x为目标事件位置向量;
为主事件与目标事件的互相关道集包络;m为主事件位置向量;x为目标事件位置向量; 为包含未知激发时刻t0的走时差信息项;i为检波器编号。相对干涉成像运行时间短,成像的计算成本低,定位结果的可靠性提高。
为包含未知激发时刻t0的走时差信息项;i为检波器编号。相对干涉成像运行时间短,成像的计算成本低,定位结果的可靠性提高。
Wang等[48]把逆时聚焦成像和干涉成像相结合,不需要拾取到时,具有极好的抗干扰性。与传统的逆时定位方法相比可以提高定位精度。
《4.4. 多方法多参数信息融合》
4.4. 多方法多参数信息融合
信息融合是在一定准则下对从单个和多个信息源获取的数据和信息进行关联、相关和综合,以获得精确的位置[49−51]。微震监测定位具备了进行信息融合的条件,不同测点的微震数据以及同一测点微震数据的不同参量(如P波波速、S波波速、振幅等)都可以进行信息融合,另外,不同的微震定位方法得到的结果同样可以进行信息融合,因此,在多方法联合定位的基础上,引入有效的信息融合技术,有望大大提高复杂地质条件下的微震定位精度。而信息融合的难点是建立科学的评价模型,若数据融合算法设计不合理,得到的结果将会产生巨大的误差。
《4.5. 深度学习》
4.5. 深度学习
机器学习是实现人工智能的方法。机器学习已经被用于进行提高地震数据信噪比[52],Zhao和Gross[53]利用有监督的机器学习把微震事件从噪声中区分开来。深度学习是机器学习的一个分支,是基于神经网络的机器学习。深度学习近年来在语音识别、计算机视觉等多类应用中取得突破性的进展。其动机在于建立模型模拟人类大脑的神经连接结构,在处理图像、声音和文本这些信号时,通过多个变换阶段分层对数据特征进行描述,进而给出数据的解释。
微震监测数据是海量数据,很显然,具备了深度学习应用的前提。目前基于深度学习的微震震源定位的研究处于起步阶段。虽然深度学习目前无法直接进行震源定位,但是可对实时微震监测信号进行分析,将深度学习框架所具备的对数根据本质特征的刻画能力与过程神经元网络的时空维信息处理机制相结合,依据矿山地层、构造、采矿活动和工程地震理论,进行动态信号深度分析模型和深度过程神经元网络理论、算法和实现技术研究,将人工智能引入微震监测,实现微震震源定位的自动化,提高定位精度。本方法的主要问题是训练数据和验证数据很难获得。
《5. 结论》
5. 结论
经过多年的发展,多种微震震源定位方法被提出,大多是适用于某种特定条件,但没有一种能够满足所有条件的定位方法。大多数情况下微震震源定位精度得不到保证,甚至出现定位结果误差很大的情况,进而导致利用震源定位结果对岩层破裂状况进行预测的可信度低。
在优化传感器布置的基础上,必须协调到时自动拾取、波速模型和定位方法三者之间的关系。微震传感器布置到位后,分别在矿井顶板、底板、矿层等关键层位爆破,根据监测数据,利用Dijkstra最短路径思想计算射线路径,反演P波速度结构。在现场实测P波波速的基础上,要根据拾取到时判别准则判别P波、S波和异常波,并选用对应的动态波速模型。微震事件能量大、信噪比高时,到时自动拾取精度将会提高。能量较小的微震信号,到时自动拾取精度将难以保证。
优化到时拾取算法或采用无需初至到时的定位方法,继续完善基于到时定位方法。降低速度模型、初至时刻对矿山微震震源定位的影响是未来微震监测发展的必然要求。
干涉成像法、基于波形叠加的全波形信息定位法等不需要精确拾取初始到时,对速度模型依赖度低的微震震源定位方法,对低信噪比数据也可以处理。信息融合充分利用微震动力学和运动学参数,结合多源异类信息,以实现震源定位。深度学习具有更高的非线性运算水平和更强的表示能力,因而基于深度学习的矿山微震震源定位方法,具有广阔的发展前景。
大多数情况下地下岩体的真实情况是无法获知的,震源位置相对于测点是完全随机的,为实现震源高精度定位,应尽可能地利用已知资料,根据已知条件,选择最合适的定位方法,最终实现矿山微震震源高精度自动定位。
《致谢》
致谢
本研究得到国家重点研发计划项目(项目编号:2016YFC0801405和2017YFC0804105)和国家自然科学基金项目(项目编号:51574250)的支持。感谢伦敦城市大学光电仪器研究中心的陈烨博士对本文的建设性意见。
《Compliance with ethics guidelines 》
Compliance with ethics guidelines
Jiulong Cheng, Guangdong Song, Xiaoyun Sun, Laifu Wen, and Fei Li declare that they have no conflict of interest or financial conflicts to disclose.











 京公网安备 11010502051620号
京公网安备 11010502051620号




