
《1.引言》
1.引言
力反馈手套是一种可穿戴的触觉设备,穿戴者可以通过手的灵巧操作和灵敏的感知能力,直观且直接地触摸和操纵虚拟物体。高性能的手套能够在保持高刷新频率的前提下,通过提供力觉和触觉反馈真实地模拟触摸和操纵物体。随着近年来虚拟现实(virtual reality,VR)和增强现实(augmented reality,AR)系统的兴起,力反馈手套将成为改善VR系统沉浸感和交互特性的重要触觉接口。
在过去的30年中,国内外学者研发了许多力反馈手套,其中大部分是用于研究的物理样机[1−7];只有少数力反馈手套成为商品用在了VR场景中[8]。由于下述原因,现有的手套均难以满足VR交互中高逼真度力反馈的严格性能要求。首先,手套质量过大很大程度地影响了穿戴者的交互体验。根据桌面力反馈设备如PHANTOM desktop device[9]的成功经验可以看出,为了让穿戴者体验一种逼真的自由空间交互体验,设备的等效质量应该小于100g。其次,手套需要有较大的运动范围来模拟典型的抓取位置,需要有较大的力和阻抗范围来模拟约束空间中的相互作用。再次,手套应便于穿戴,适合不同手型的使用者。
为了兼顾自由空间仿真和约束空间仿真的矛盾要求,本文提出了一种采用气动驱动机构的力反馈手套。本文工作的创新点包括以下几个方面。
(1)提出了一种新颖、结构简单的凸轮连杆组合机构力传递方案。采用带有凸轮和三个运动副的连杆,该机构不仅能够将阻力从气动活塞杆传递到穿戴者指尖,并且重量非常轻。本文介绍了一种利用力平衡的方法计算出带有三个运动副的连杆上弯曲滑槽轮廓的系统模型,以实现任意给定手指关节构型下尽可能大的指尖反馈力法向分量。
(2)将该机构安装在使用者的手背侧,以获得指尖较大的工作空间。根据手指不同旋转位姿的包络轮廓,本文设计了连杆的几何形状。这种安装方式允许手指的完全闭合运动,而不受连杆和手之间的干涉。
(3)为了定量评价手套在自由空间和约束空间中的性能,本文提出了一种可穿戴力测量方案。实验结果表明,本文所提出的传动方案大大降低了运动连杆的质量和运动副的摩擦力;所研制的力反馈手套拥有优秀的自由空间反向驱动性,平均阻力小于0.1N。在约束空间方面,传动机构提供了最大4N的法向反馈力,而实验测量的切向反馈力小于0.5N。
本文第二节总结了现有力反馈手套的相关工作;第三节提出了一个机械设计方案,重点是具有弯曲滑槽的机构设计;第四节详细阐述了控制系统的设计;第五节展示了实验结果;第六节为讨论部分;第七节是总结和未来工作展望。
《2.国内外研究现状》
2.国内外研究现状
力反馈手套有两种驱动方案:被动驱动和主动驱动。被动驱动手套使用抱闸、可控阻尼器或电磁离合器提供阻力[3,4,10,11]。当被动执行器工作时,穿戴者可以感觉到阻力。即使在系统发生故障的情况下,被动驱动也不会对穿戴者造成伤害。但是,当使用者的手保持静止时,它们不能提供力的反馈;因此,它们无法实现主动力反馈或呈现可变刚度。
电机[1,2,4,12]、气动[13−15]等主动执行器在力反馈手套中得到了广泛的应用。主动驱动解决方案的优点是可以提供主动控制,模拟高更新频率的主动力和运动输出;它的缺点是在系统故障的情况下,手指可能会受伤。为了避免潜在的伤害,在大多数有效的触碰时手套将最大输出力限制在10N左右。
在设计力反馈手套时,不同驱动方案的传动和运动学设计是关键所在。机构设计成为一个需要权衡利弊的问题,如选择执行器的数量和设计传动机构方式,从而在机构的简单性和反馈力的逼真性之间取得平衡。
首先,驱动器的数量是设计力反馈手套时需要考虑的一个重要参数。为了在指尖上提供三维(three-dimensional,3D)力反馈,一个完全驱动的解决方案可能需要在每个手指上安装三个驱动器,这意味着一个五指力反馈手套需要安装15个驱动器。一个等驱动的解决方案可能会导致沉重的重量和高成本,因此这种解决方案很少用于现有手套。很多力反馈手套采用了欠驱动的方案,例如,CyberGrasp[8]中每个手指用一个电机提供反馈力,Rutgers Master II-New Design(RMII-ND)手套[13]中每个手指用一个活塞杆提供阻力。
在确定了驱动器数量后,传动机构的设计是实现触觉手套理想性能的关键。由于驱动器通常固定在手掌或手腕上,指尖相对于手腕的运动轨迹较为复杂,需要一种机构将驱动器的扭矩传递给安装在穿戴者指尖上的末端机构。
设计传动机构的难点之一是需要考虑自由空间仿真与约束空间仿真之间明显矛盾的性能指标要求。一方面,为模拟自由空间的力觉感受,机构中各连杆的重量和惯量应较小,各运动副的摩擦力也应较小,才能实现令人满意的反向驱动性;另一方面,为了在有限空间仿真中提供足够的力反馈范围和整体的大刚度,连杆的强度和刚度必须足够大。此外,为了减少由传动机构引起的反馈力的误差积累,最好采用连杆少、运动副少的机构。
在各种传动机构设计方案中,绳驱动传动系统广泛应用于力反馈手套[2,8,12]。绳驱动解决方案具有惯性小、传输距离长、无间隙等明显优点。然而,为了保证绳驱动系统[16]的性能,需要专门设计的机械装配和控制算法来维持绳的张力。
最后,定量评价力反馈手套的性能仍然是一个挑战。桌面力反馈设备,如Phantom desktop[9]和Omega.3[17],可以提供约束空间的最大刚度和自由空间的等效阻力等详细的性能指标。然而,对于力反馈手套,很少有系统提供量化的性能数据。例如,CyberGrasp[8]无法获得反向驱动性和最大刚度的量化数据。同样,RMII-ND手套也缺乏可模拟最大刚度数据。缺少这种量化数据的主要原因是缺少能够同时测量穿戴者操作力反馈手套时的实时运动和反馈力的评价系统。
《3.凸轮连杆组合机构的设计》
3.凸轮连杆组合机构的设计
《3.1.概念设计》
3.1.概念设计
如图1所示,本文提出的凸轮连杆组合机构固定在穿戴者的手背。忽略近端关节的外展/内收运动,包括机构和手指在内的整个运动系统可以看作是一个平面机构。压缩空气注入气缸(连杆7),气缸对活塞杆(连杆6)施加阻力。由三个运动副(转动副F、转动副D和一个凸轮高副H)组成的传动连杆将驱动力从活塞杆传递到指尖。由于指尖轨迹为曲线,在带有三个运动副的连杆(连杆4)内引入了一个弯曲的滑槽。当手指移动时,滚筒(连杆5)沿着滑槽滑动,并通过转动副(G)旋转。
《图1》
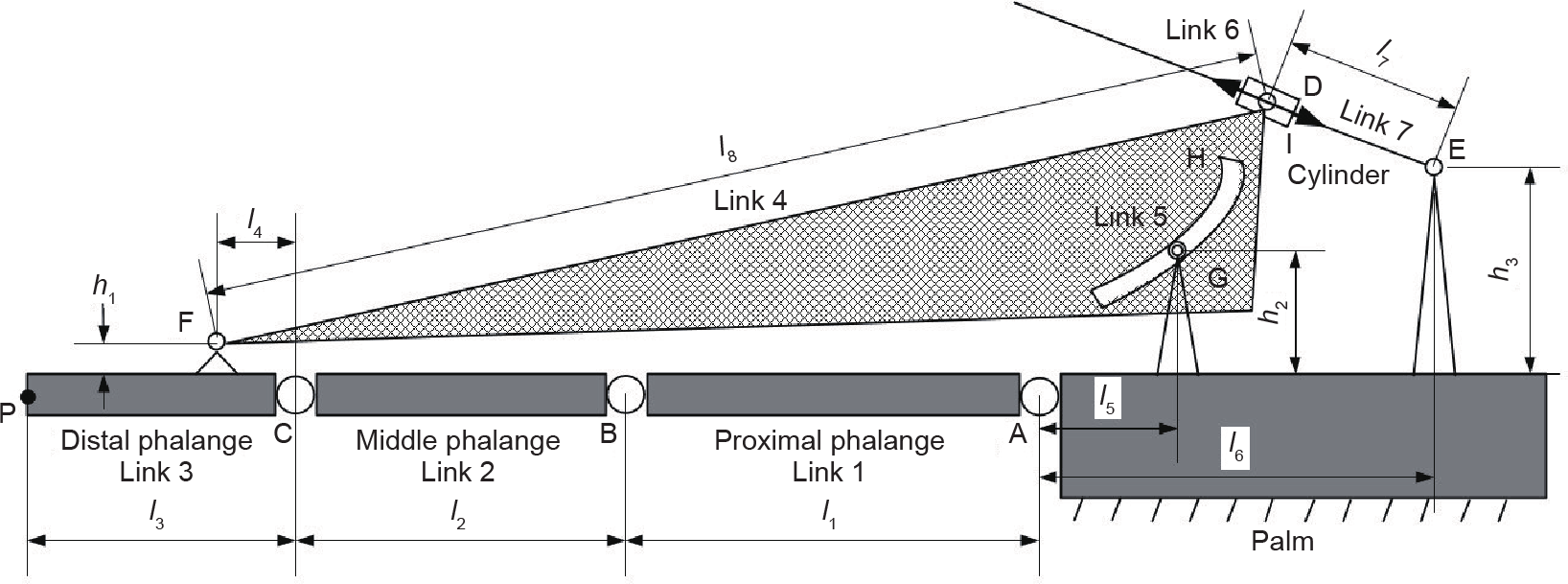
图1.穿戴者食指上的凸轮组合连杆机构运动简图。
去除穿戴者手指后,平面机构自由度(degree of freedom,DOF)定义为:F=3n–2PL–PH–FP,其中,n、PL、PH和FP分别为连杆数量、低副数量、高副数量和局部自由度数量。在本文提出的机构中,n=4,PL=4,PH=1,FP=1。由于该平面机构的自由度为2,该机构能够支持指尖在屈伸平面内的任意运动。
该机构的一个特点是仅使用一个传动连杆(连杆4)即可满足力传递要求,从而大大减轻了力反馈手套的重量。另一个重要的特征是,设计的连杆并不是为了在指尖上产生任意的三维力。相反,通过设计连杆上弯曲滑槽的特定轮廓,该机构可以提供一个大的法向力,而对穿戴者指尖的切向力可以忽略不计。本文将在3.2节详细讨论这个问题。
在3.3节中,为了计算给定指尖反馈力所需的气压,推导了反向力学模型。通过将该机构安装在穿戴者手的背侧,可以获得较大的指尖工作空间。在3.4节中,确定了连杆的几何形状,以保证机构与手之间不发生干涉。
《3.2.曲线滑槽的轮廓设计》
3.2.曲线滑槽的轮廓设计
由于只有一根活塞杆可用来提供阻力,因此该机构的设计目标是在任意手指位姿下得到尽可能大的指尖反馈力的法向分量。在该机构中,滑槽的曲线轮廓是实现这一目标和保证手指关节自由运动的关键。
本文通过分析该机构的运动特性和受力特性,分两步对滑槽曲线轮廓进行分析:首先,建立了指尖轨迹采样点与滑槽轮廓对应的参考点之间的映射关系;其次,为了得到足够小的指尖切向力,建立了力平衡方程,该方程描述了指尖上的法向反馈力与每个参考点的滑槽切向之间的关系。
第一步的设计原理是,对于给定的指尖运动序列,滑槽的轮廓可以由对应位置的多个参考点来定义。图2所示为指尖轨迹上的采样点及对应的滑槽轮廓线的参考点。
《图2》
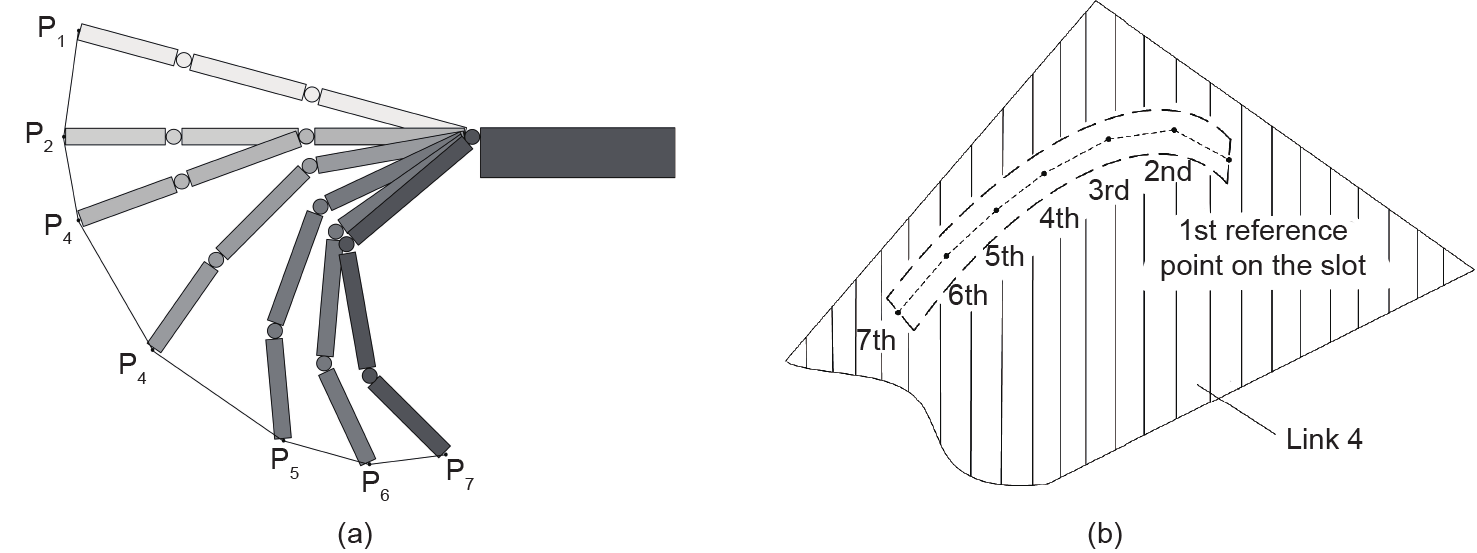
图2.从指尖运动到曲线滑槽轮廓的映射。(a)指尖轨迹上的采样点;(b)滑槽轮廓对应的参考点。
因此,将计算轮廓的问题表述为:给定所有连杆的长度和指尖的轨迹(由手指关节旋转角度的组合来定义),求曲线滑槽的轮廓。为了探究这个问题,如表1所示,定义了指尖轨迹上的7个采样点。其中,θ1,θ2,θ3表示手指近端到远端三个关节的旋转角度。坐标系定义如图3所示。所有的坐标系都用右手法则定义。
《图3》
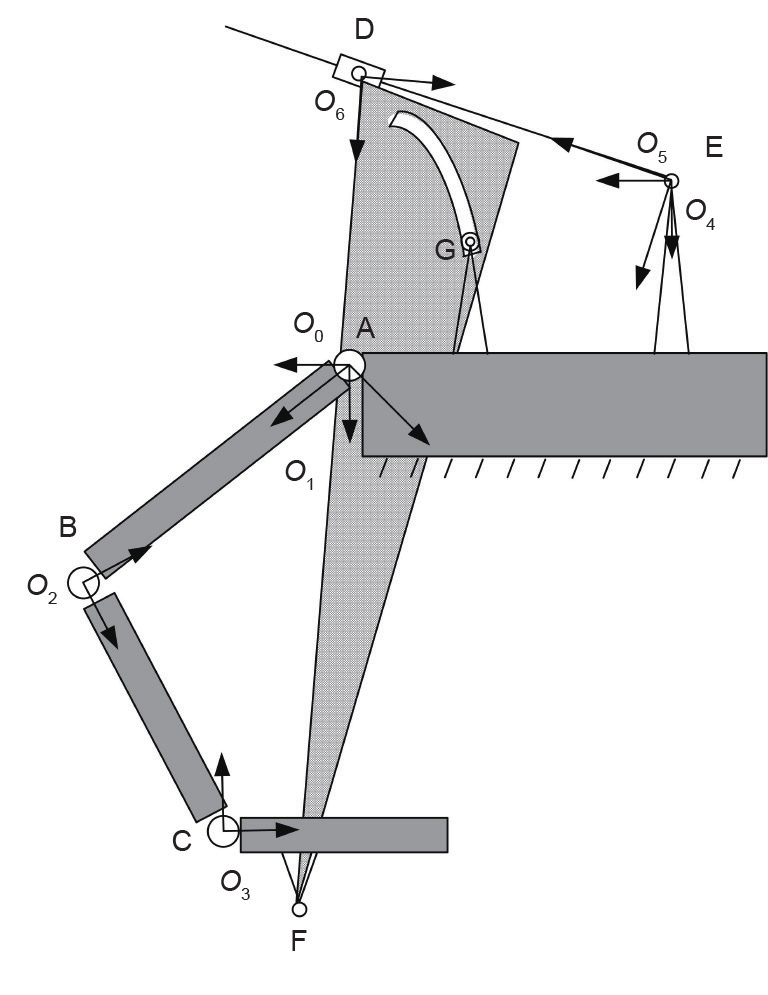
图3.坐标系的定义(字母“O”表示坐标系)。
《表1》
表1 指尖轨迹上的采样点

对于表1中的7个采样点,设计目标是计算曲线滑槽轮廓上对应的参考点(6PG),即点G相对于坐标系O6的坐标。根据图1的运动学简图,可以构造如下齐次方程:

式中,mTn是可以将任意点从坐标系On变换到坐标系Om的变换矩阵。这些方程包含5个未知变量,即6PG_x、6PG_y、l7、θ5、θ6,而所有其他参数l1、l2、l3、l4、l5、l6、l8、θ1、θ2、θ3、h1和h2都是已知的。利用这些方程,点F的坐标可以描述为相对于坐标系O6的坐标[l8 0 0]T。同理,点G可以被描述为[–l5 –h2 0]T。
由于只考虑坐标系中x轴和y轴的分量,可以从公式(1)中推导出4个方程,因此还需要另一个方程来求解这5个未知变量。因此,通过使用曲线滑槽轮廓的切向方向提出了第五个方程。如果将曲线描述为y=f(x),根据凸轮的特性,曲线在每个参考点处的切线始终垂直于矢量F3,如下所示:

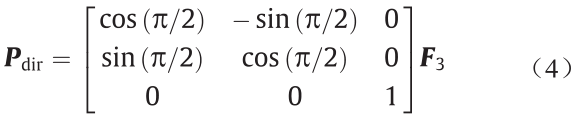
如图4所示,在曲线轮廓的每个参考点上,可以构造一条切向线。因此,可以利用曲线上的离散点坐标得到公式(3),从而近似求解公式(2)。

式中,pi–1_x和pi–1_y表示轮廓上前一个参考点的x和y分量;pi_x和pi_y表示轮廓下一个参考点的x和y分量,这也是方程中两个未知数。 和
和 表示垂直于矢量F3的切向矢量6Pdir的x和y分量。这个方程表明,在静止状态下,所求曲线总是垂直于矢量F3的。
表示垂直于矢量F3的切向矢量6Pdir的x和y分量。这个方程表明,在静止状态下,所求曲线总是垂直于矢量F3的。
《图4》
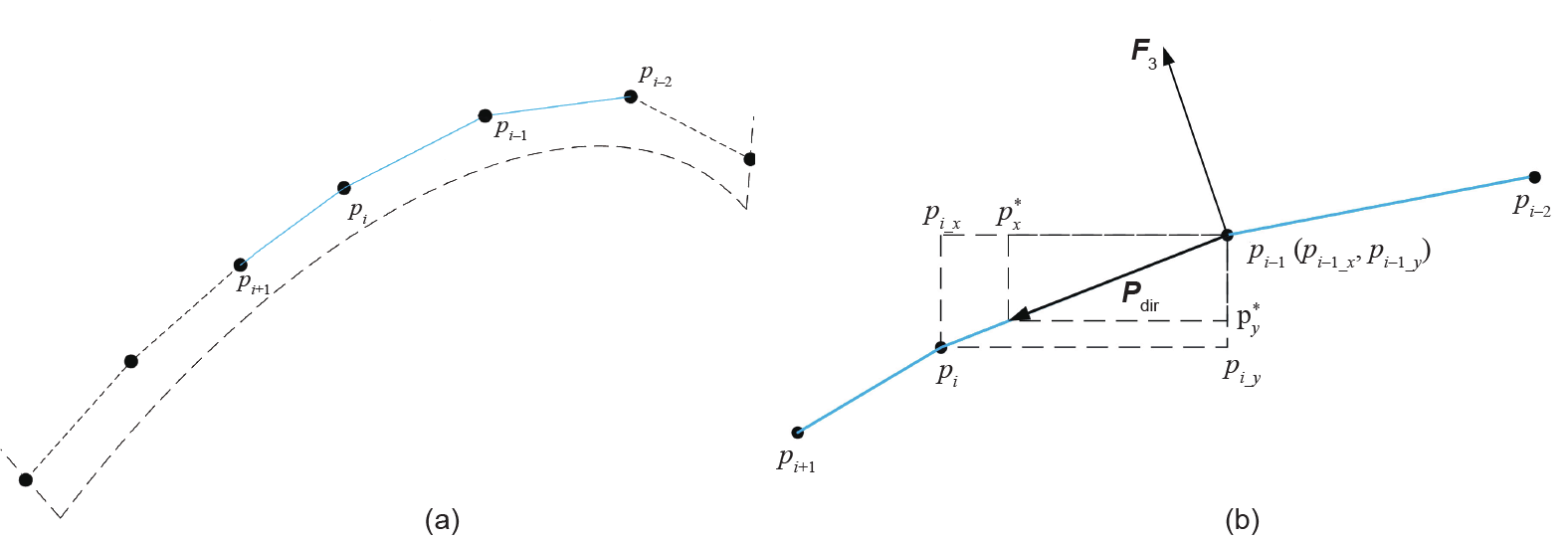
图4.沿曲线轮廓在每个参考点上的切向线的构造。(a)7个参考点每一点的切线;(b)在一个参考点处的切向线的放大图。
通过联立公式(1)、公式(3),得到5个未知变量6PG_x、6PG_y、l7、θ5和θ6。需要注意的是,当计算曲线上的第一个参考点时,公式(2)略有不同,由于此时∂y/∂x未知,无法构造第五个方程,即只有4个方程。因此,将其设置6PG_y为已知变量,此时只剩下4个未知变量。接下来就可以计算第一个参考点的坐标了。
为了构造公式(3),需要知道每一对相邻采样点之间直线的方向,即向量Pdir。如图4所示,该向量近似垂直于向量F3。
如图5所示,指尖反馈力的方向F3可以由连杆(即图5中阴影部分代表的连杆)的力平衡方程和力矩平衡方程计算得出。通过对G点的力学分析,可以推导出如下方程:

式中,L1表示坐标系O6中从F到G的向量;L2表示坐标系O6中从D到G的向量。
《图5》
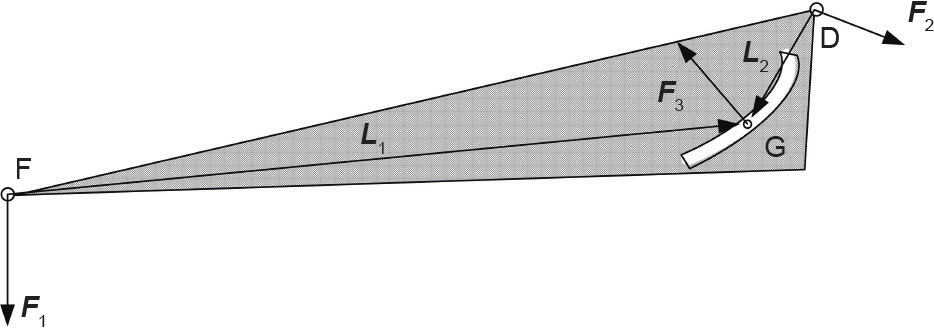
图5.连杆的力平衡原理示意图。
在使用公式(1)、公式(3)解算滑槽轮廓后,得到轮廓的7个参考点,如图6(a)所示。在滑槽轮廓的第四个点是一个转折点,这意味着对于给定的指尖轨迹,滑块5的运动不是单向的,而是双向的。如果根据这个结果加工制造滑槽,滑槽将有两个分支以允许滑块的来回运动。但是这样会导致机械结构复杂,拐点处摩擦力大。
为了解决这个问题,提出了一个简化的滑槽轮廓。如图2(a)所示,当手指关节旋转超过第四个采样点时,手指关节的旋转角度较大,这些手指位姿(即第5、6、7个采样点)在日常操作中使用频率不高。因此,本文通过删除最后3个参考点来简化滑槽轮廓。相反,使用线性插值来产生另一个新的点作为第五个参考点。最后,利用样条拟合算法,得到一个新的轮廓,如图6(b)所示。第6节的实验数据表明,该简化轮廓可以保证指尖的自由运动,并且可以将阻力从杆传递到指尖。
《图6》
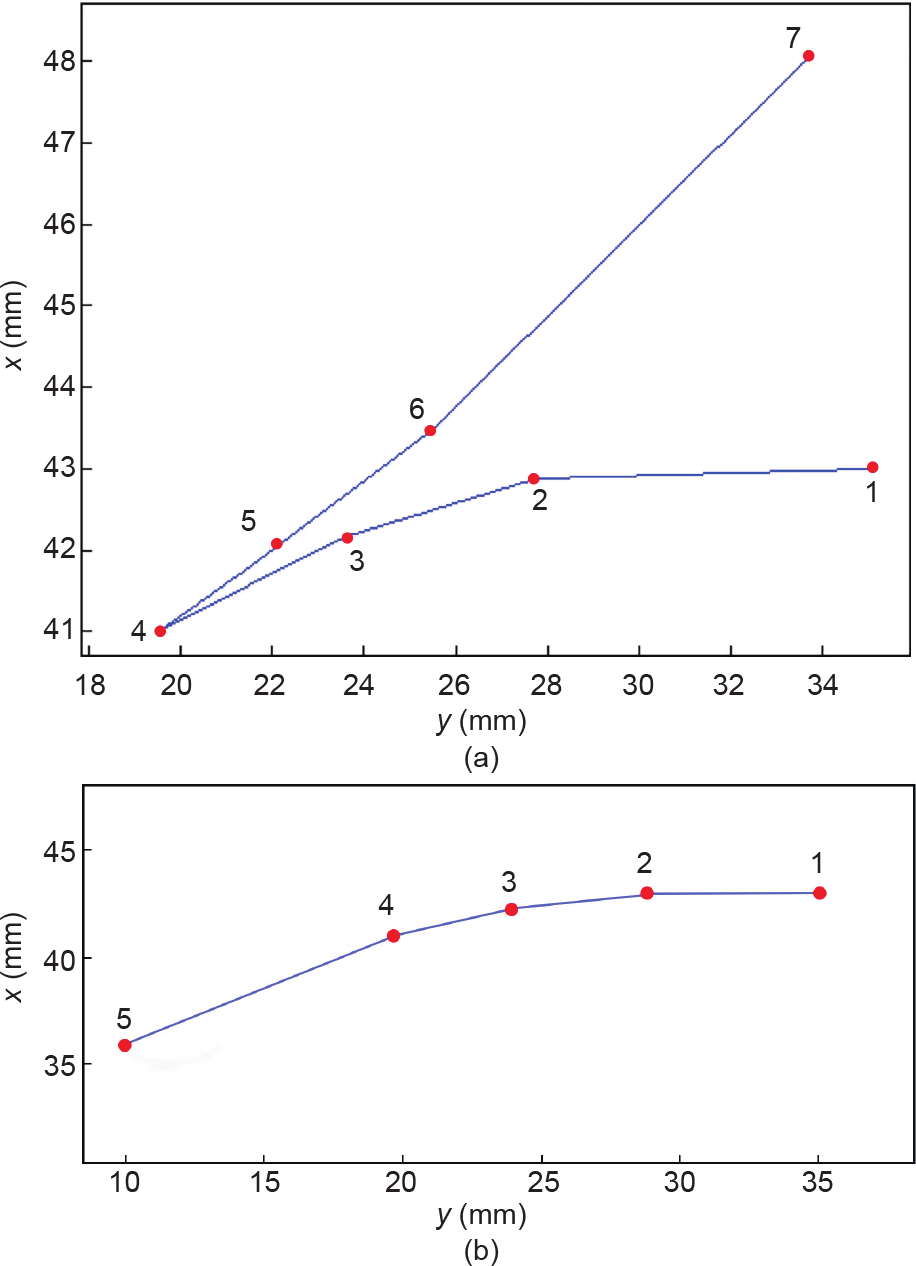
图6.滑槽轮廓上的参考点。(a)模型计算的原始参考点;(b)采用简化和样条拟合的新轮廓。
《3.3.反向力学模型》
3.3.反向力学模型
如图5所示,反向力学模型的作用是在需要给定指尖力F1时计算活塞杆上需要的阻力F2,即:

需要注意的是,这个方程依赖于手指关节的位姿,也就是手指关节角度的组合。
计算模型包括以下4个步骤。
步骤1:根据给定三个关节角,计算曲线轮廓上滑块(连杆5)的位置6PG。
已知三个关节角,可得点F与点G之间的距离:

其中

其中

且

通过比较点F和点G之间的距离LFG与点F到曲线轮廓上5个参考点的距离Di,可以确定滑槽轮廓上任意点的位置,即当满足Di<LFG<Di+1时,轮廓上的任意点位置可以通过使用参考点之间的线性插值得到:

其中

步骤2:计算力的方向F3,即F3_dir。

步骤3:计算力F2的方向,即F2_dir。

因此

其中

且
步骤4:根据带有三个运动副的连杆的力学平衡方程计算力F2的大小。
根据公式(5)构造力和力矩平衡方程:

式中,k2为F2的模;k3为F3的模。
对于所构造的力与力矩平衡方程,有三个方程、三个已知变量(即F1、F2、F3)和三个未知变量(即k2、k3、F1的切向分量大小F1t)。
根据图3中的几何关系,可推导出:

因为3F1=[F1t F1n 0],其中F1n表示F1法向分量的大小,可以推出:

其中

因此,可以计算F2的大小如下:

其中

此外,还可以计算F1的切向分量的大小,如下:

其中

《3.4.结构设计》
3.4.结构设计
在本文提出的传动机构中,确定带有三个运动副的连杆的形状非常重要。该连杆必须允许手指做出各种抓取动作。为了防止穿戴者转动手指关节时连杆对手产生干涉,本文通过绘制手指弯曲时的包络线来确定连杆的形状,如图7(c)所示。如图7所示,所设计的连杆能够适应手指关节不同的旋转角度。
《图7》
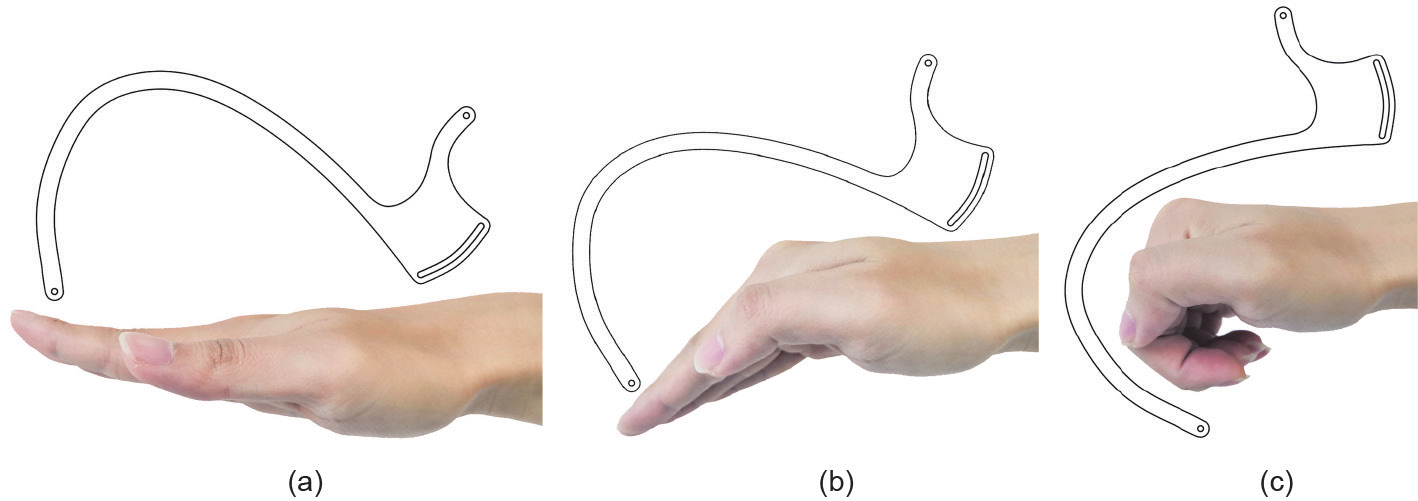
图7.连杆的曲线形状适应手指不同的弯曲角度。(a)手指伸展;(b)小角度弯曲;(c)大角度弯曲。
图8为使用SolidWorks Program(Dassault Systèmes,法国)构建的虚拟样机。采用迭代设计方法需要确定虚拟样机各机械部件的尺寸。为保证手套的反向驱动性,采用了规范化的结构设计标准,其中包括材料选择和尺寸优化。连杆选用轻质材料,带有三个运动副的连杆采用碳纤维材料,手指帽采用塑料材料,手套底座安装在穿戴者的手掌背部。连杆尽可能薄(2mm)以减轻重量,同时保证连杆所需的刚度和强度。
《图8》
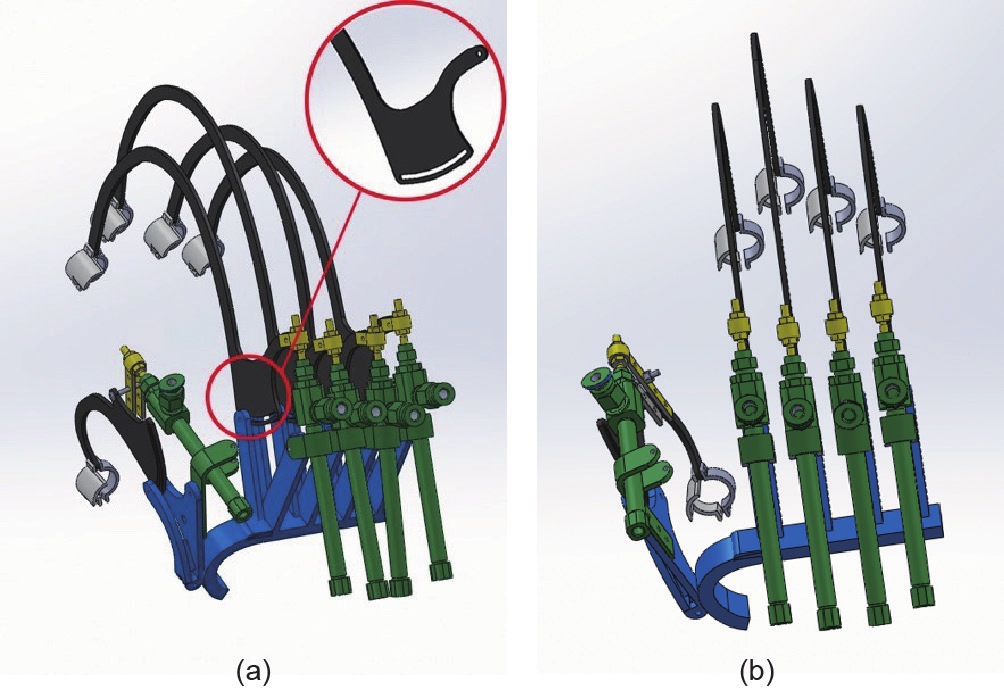
图8.使用SolidWorks Program构建的力反馈手套的虚拟样机。
《4.控制系统设计》
4.控制系统设计
《4.1.控制系统架构》
4.1.控制系统架构
控制系统架构如图9所示。控制系统包括一台计算机、一个下位机和若干气动执行元件(即气泵、储气罐、空气过滤器、减压阀、电气比例阀、气缸及相关活塞杆)。注意图9中的方案只表示单指的力反馈系统。5个手指均使用相同的控制原理。
《图9》
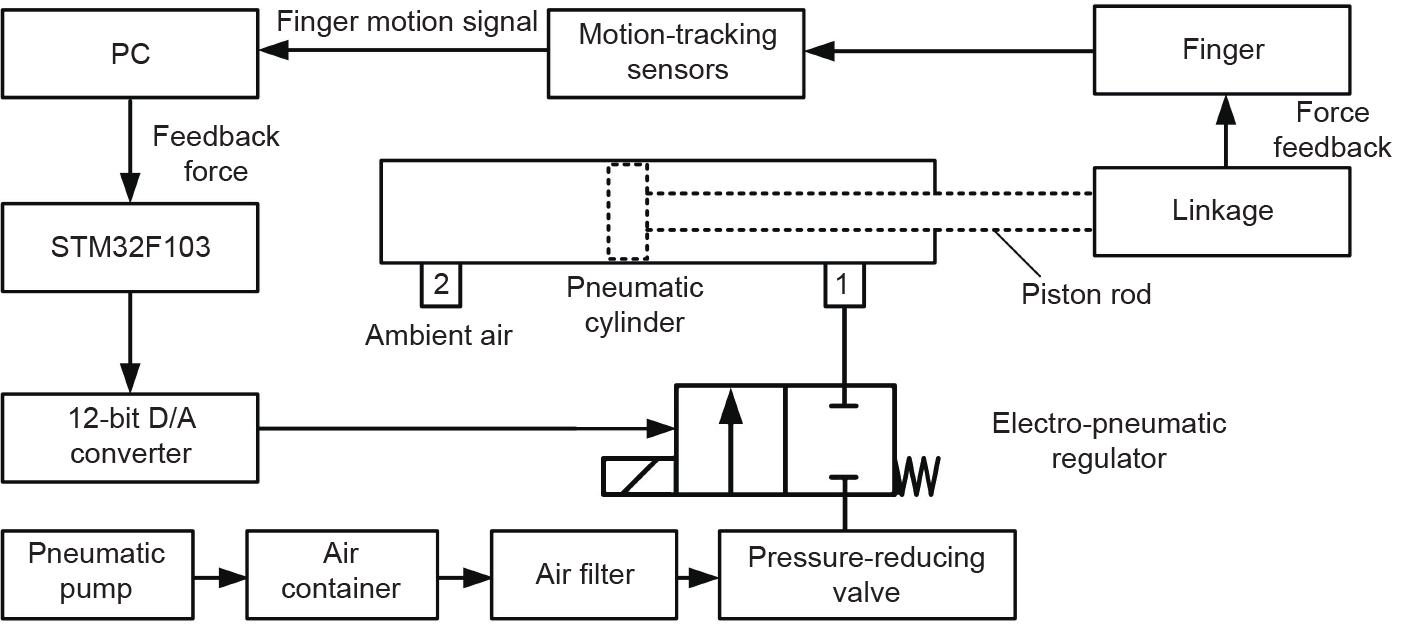
图9.控制系统的架构。
为了模拟虚拟抓取操作和产生反馈力信号,本文在计算机上运行虚拟环境和触觉渲染算法。当穿戴者手指弯曲时,手指的运动信号被手套上的运动跟踪传感器记录下来;这些信号可以驱动虚拟环境中虚拟手的化身,以模拟不同的抓取行为。
下位机为STM32F103单片机,闪存512KB,12位D/A转换器,工作电压小于12V DC。下位机通过串行USB接口与计算机通信。控制器提供六通道D/A输出信号,驱动5个电动气动调节器。
气泵的作用是产生压缩空气。储气罐保持空气气压高于阈值,以避免频繁地启停气泵。空气过滤器的作用是消除空气中的油污染,从而延长电气比例阀的寿命。减压阀将稳定的气压输入到电气比例阀,电气比例阀产生可控制的气压输入到气缸。
每个电动比例阀连接到双作用气缸的第一端口(端口1)。气缸的另一个端口是与大气连通的。活塞杆与气缸之间的摩擦力足够小,可以保证活塞杆的平稳运动,从而模拟自由空间。为了模拟约束空间,充气进入气缸的空气气压对活塞杆产生阻力,这些力通过连杆机构传递到穿戴者的手指上。
《4.2.力控制建模》
4.2.力控制建模
用于模拟约束空间的性能指标包括施加在指尖的最大反馈力、反馈力的分辨率、反馈力的响应性以及手套可以模拟的最大刚度。
作用在活塞杆上的力的大小由下列因素决定:

式中,Pd、P0、πR2、πr2分别表示充入气缸的气压、环境气压、气缸的横截面积、活塞杆的横截面积。
气压范围是由指尖所需要的最大力和手套重量限制之间的权衡决定的。一方面,更大的气压可以实现更大的指尖反馈力;另一方面,更大的气压需要更大的气缸,这可能会增加手套的重量。因此,气压的上限受气缸重量和尺寸的限制。气压是根据需要获得的指尖力,用公式(6)和公式(26)计算得出的。
根据电气比例阀的模型,可以推导出:

式中,Ur为电气比例阀输入电压;kr为电气比例阀系数。
结合公式(26)和公式(27)可以计算出对活塞杆施加的最大力,这是由电气比例阀的最大输出电压决定的。利用以下正向力模型,可以计算出施加在指尖上的最大力:

式中,J为雅可比矩阵,雅可比矩阵取决于手指关节的位姿。
此外,还可以计算施加在指尖的力的分辨率(ΔF1)如下:

式中,ΔF2为施加在活塞杆上的力的分辨率,可通过对公式(28)中的力模型进行微分计算得出。力的分辨率由电气比例阀的电压分辨率决定。
如图7所示,手套的响应性由虚拟环境产生的反馈力信号时刻开始到施加在穿戴者指尖的反馈力时刻的延迟来量化。延迟大致可以建模为:

式中,ΔT1为计算机与控制器之间的通信时延,由通信硬件和协议决定;ΔT2为控制器到气泵的延时,由控制器的类型和控制器中定时器的更新速率决定;ΔT3为气泵到电气比例阀的延时,由气泵的动态响应决定。本文采用了缓冲式储气罐和气泵,节省了气压,消除了延迟。ΔT4为电气比例阀到气缸的延迟,由气管内的气流速度决定,而气流速度受到气管直径和长度的影响;ΔT5为活塞杆到指尖的延时。
根据典型的虚拟墙实验[18],本文进行了力反馈手套的刚度kd的模拟:

式中,ΔPf表示手套跟踪指尖运动的位置分辨率;ΔF1表示施加在指尖上的力的分辨率。
《4.3.控制系统的实现》
4.3.控制系统的实现
如表2所示,确定了气动系统主要部件的性能指标。为了保持手套的反向驱动性,模拟自由空间的感觉,活塞杆与气缸之间滑动副的摩擦力应尽可能小。因此,本文选用摩擦力小的小型活塞杆和气缸。如表2所示,该气缸质量小(26g),能承受较大的输出力(19.79N),且活塞杆与气缸之间的摩擦力较小。
《表2》
表2 气动系统主要部件的性能指标
《5.实验》
5.实验
在本节中,首先总结物理样机的主要参数。然后,测量了力反馈手套的工作空间。本文引入了一种测量方法来测量模拟自由空间和约束空间穿戴者感觉的性能数据,通过构建可穿戴力测量系统,可以对手套进行量化评价,包括自由空间和约束空间仿真时指尖的阻力和手套的模拟刚度。
《5.1.物理样机原型》
5.1.物理样机原型
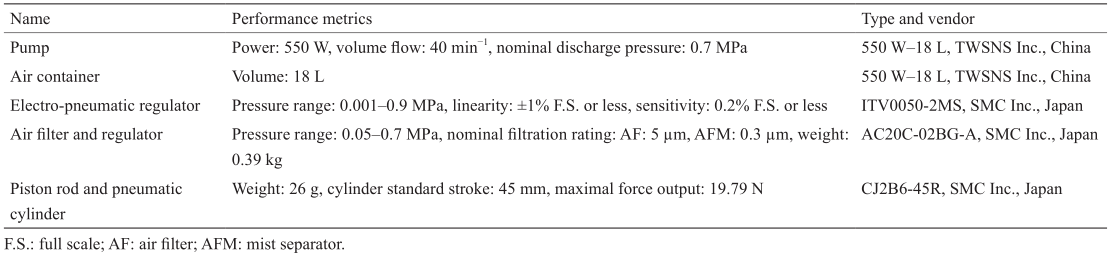
五指力反馈手套的物理样机如图10所示。表3中列出了力反馈手套的主要特点。另外,本文提供了一段视频,演示了手套在自由空间和约束空间中的运动。
《图10》
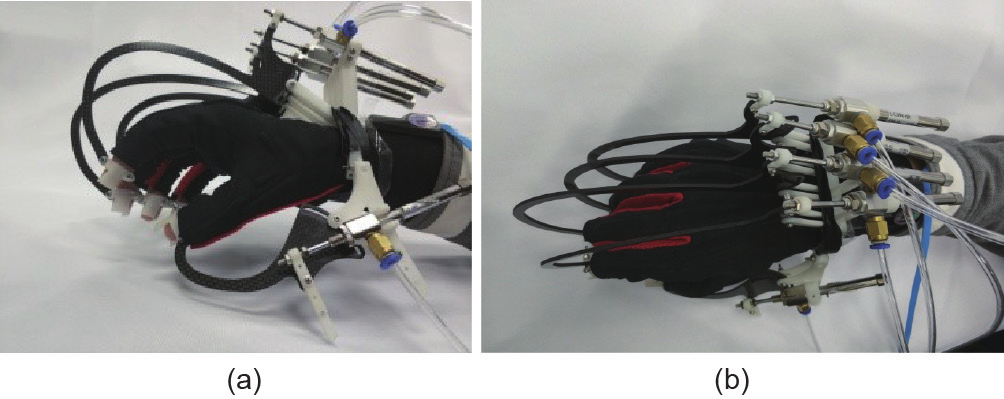
图10.手套的物理原型。(a)侧视图;(b)俯视图。
《表3》
表3 力反馈手套的特点
为了跟踪手指关节的运动,本文采用了一款商业数据手套(WiseGlove,WiseGlove Inc.,中国)。手指关节的运动跟踪分辨率为0.02°,关节角运动测量精度为3°。运动信号的采样频率是70Hz。
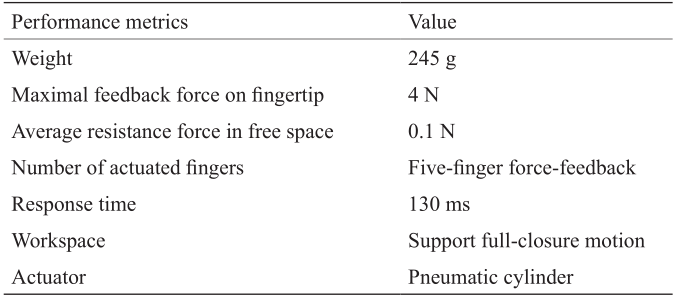
如图11所示,手套允许手指半闭合和全闭合的自由运动。当手指弯曲和张开时,机械装置和手指之间没有干涉。结果表明,带有3个运动副的连杆上弯曲滑槽的轮廓能够使手指自由运动。
《图11》
图11.手套自由运动性能。(a)手指伸展;(b)半闭合姿势;(c)完全闭合姿势。
当手指处于全闭合位置时,可以模拟直径为30mm的虚拟球体抓握。如图12所示,该手套能够模拟多种抓持操作,包括正常抓取和捏取操作。
《图12》

图12.手套可模拟多种抓持操作。
《5.2.性能评价方法》
5.2.性能评价方法
本文研制了一种可穿戴式力测量系统,对力反馈手套的性能进行了量化评价。测量装置原理如图13所示。为了在指尖下安装一个六轴力/力矩传感器(ATI Nano17,ATI Inc.,美国),加工了一个定制的指套来将力/力矩传感器固定在其中。
《图13》
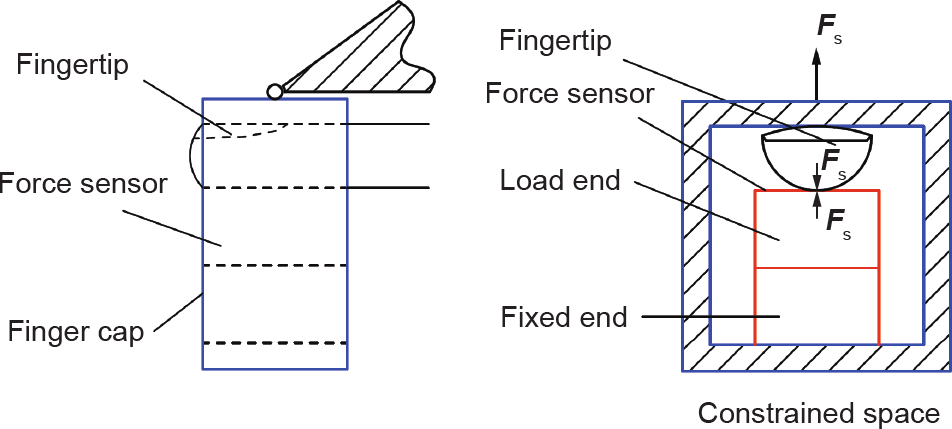
图13.测量装置的原理。(a)侧视图;(b)剖面图。
在模拟自由空间时,气缸是关闭的。穿戴者手指运动时,来自运动副的摩擦力会产生阻力。该阻力通过指套传递到指尖,导致指尖与力/力矩传感器负载端之间产生相对变形。因此,此时力传感器的测量信号表示自由空间模拟过程中的阻力。
在模拟约束空间时,需要开启气缸。活塞杆通过传动机构将反馈力Fs传递到指套上。该力作用在传感器的负载端上,导致指尖变形。因此,此时力传感器的测量信号代表了约束空间模拟过程中的阻力。测量装置的物理样机如图14所示。
《图14》

图14.测量装置的物理样机。
《5.3.自由空间仿真性能》
5.3.自由空间仿真性能
反向驱动性是衡量自由空间感受最重要的指标,它受各运动副摩擦力、各连杆重力和惯性力以及各运动副间隙的影响。
利用该测量系统测量了手指自由运动时的阻力。气缸在关闭状态时,穿戴者以近乎恒定的速度(20mm·s−1)前后移动手指5次。如图15所示,作用在指尖的最大力约0.2N,阻力平均值和标准差约为(0.068±0.044)N。
《图15》
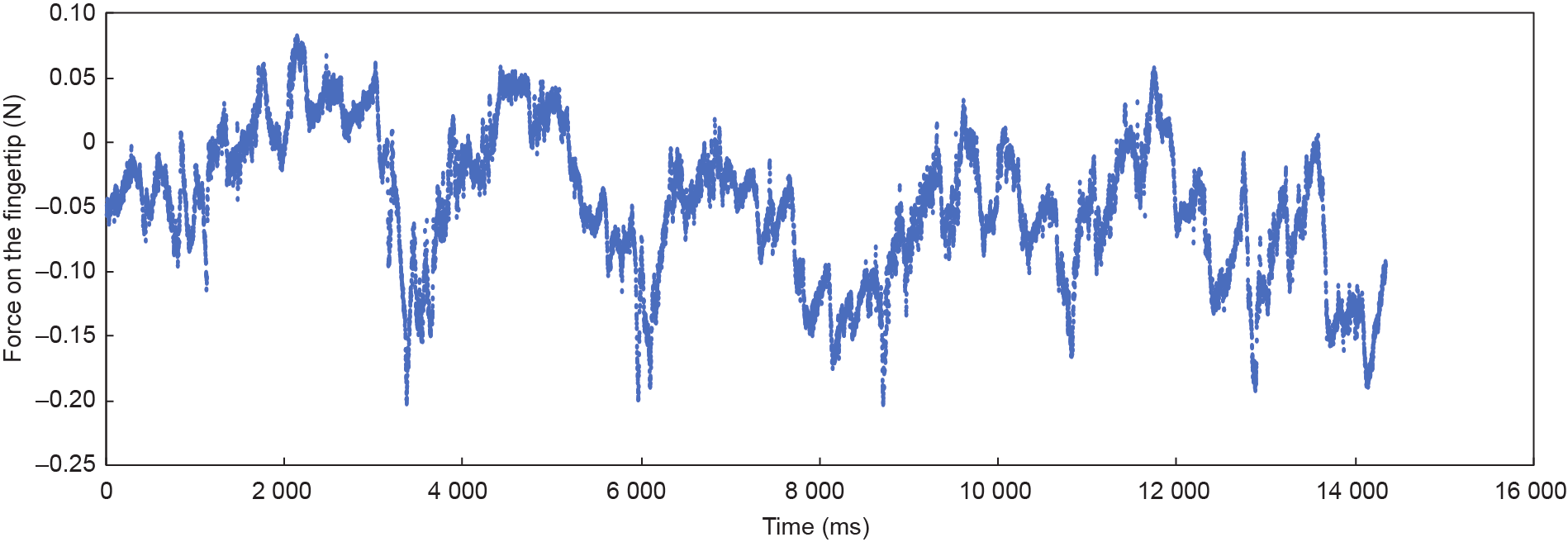
图15.自由空间仿真过程中法向力信号。
《5.4.约束空间仿真的性能》
5.4.约束空间仿真的性能
利用该测量系统还测量了约束空间的性能指标,包括施加在指尖上的最大反馈力、反馈力的分辨率、反馈力的响应性以及可以模拟的最大刚度。
由于指尖的反馈力取决于手指的位姿,测量了4种不同位姿下的指尖力。对于每一种位姿,气缸都要输入若干个不同的气压,范围从0.1MPa到0.55MPa(注意这里给出的所有气压值都是相对于环境气压的值)。
如图16所示,随着气压的增加,指尖的反馈力呈线性增加。手指全伸展状态下的最大受力约为4N。当手指关节旋转角度增大时,最大力减小到约3N。此外,随着气压的增加,指尖法向力的理论值和实验值均呈相似的线性增长趋势;这说明公式(28)中的计算模型能够近似预测力反馈手套的指尖力。
《图16》

图16.不同气压下指尖反馈力的法向分量。(a)(0,0,0)位姿;(b)(0,20,0)位姿;(c)(10,35,10)位姿;(d)(45,0,0)位姿。
由表4可知,4种位姿下指尖切向力测量数据均小于0.8N。大多数切向力小于0.5N,这意味着对于图2(a)中给定的指尖运动轨迹,凸轮连杆组合机构沿指尖法向提供的力分量要比沿指尖切向提供的力分量大得多。换句话说,曲线滑槽的轮廓能够在指尖上产生尽可能多的法向力。此外,需要注意的是,第四种构型(45,0,0)并不位于最初7个采样点所定义的指尖运动轨迹上。此外,这种位姿的切向力数据非常小。结果表明,该滑槽能适应指尖不同的运动轨迹。
《表4》
表4 不同气压下指尖反馈力的切向分量

结合运动跟踪手套,本文提出的力反馈手套可以模拟不同刚度虚拟物体的抓取。在给定的虚拟墙上,用运动跟踪手套测量指尖的运动轨迹,使用弹簧力模型来计算指尖的反馈力。实验数据表明,当虚拟对象刚度为92N·m−1时,穿戴者体验到的接触力是稳定且响应灵敏的。当虚拟物体的刚度增加到138N·m−1时,穿戴者感受到稳定的接触力,同时也感受到力反馈中明显的延迟。当虚拟物体刚度大于184N·m−1时,力反馈手套在接触虚拟物体时发生振动。这说明手套此时模拟的刚度已超出了手套的能力。
《6.讨论》
6.讨论
实验结果表明,本文提出的方法可以产生足够小的阻力来模拟自由空间的感觉,也可以提供稳定的力反馈来模拟约束空间的感觉。如表5所示,本文提出的手套重量远小于CyberGrasp手套,提供了大范围的运动空间。与Wolverine手套相比,本文的手套具有主动力和可变刚度。与RMII-ND手套相比,本文提出的手套的执行器和机构均安装在手背侧,使手指的运动范围不受手套的约束。在自由空间和约束空间,本文的手套均可支持整手伸展和握紧。
《表5》
表5 与其他力反馈手套进行比较

为了提高本文所提出的力反馈手套的性能,还必须开展深入研究。首先,本文所提出的物理样机的一个主要限制是不能准确控制垂直于穿戴者指尖的法向力的大小。为了准确地在指尖产生预期的法向力,一种可能的解决方案是引入力传感器,构成闭环控制系统,通过实时调节气缸内气压来补偿误差。
其次,手套的动态性能应该提高。与典型的力反馈装置如Phantom Desktop的最大刚度相比,该手套的最大刚度要低得多。根据触觉装置的稳定性理论[18],触觉装置的最大刚度取决于采样和控制系统的更新速度。最大刚度较低的一个主要原因是提出的手套响应速度太慢。如4.2节所述,管道内气流的传播速度造成了明显的延迟。例如,在管长为28cm、气压为0.54MPa的情况下,测量数据表明电气比例阀到气缸的延时为130ms。未来研究中需要找到新的解决方案来减少这种延迟,提高控制系统的更新速度。
再次,所提出的解决方案难以适用于不同的穿戴者,需要提出一种能够适应不同穿戴者手部尺寸的新机构。另外,手掌的安装结构是刚性的,给穿戴者不舒服的感觉。因此,开发柔性安装结构也是必须的。
最后,气泵的噪声比较大。为了降低这种噪声,可以研究低噪声泵或液压驱动方法等解决方案。
《7.结论与未来工作》
7.结论与未来工作
本文研制了一种力反馈手套,使用了每个手指只有一个连杆的轻量级连杆机构。5个手指的总质量是245g。戴上手套后,五指的工作空间依然得以保留,且执行典型的手抓握动作时不会发生运动干涉。
为了在自由空间或约束空间仿真中测量穿戴者指尖所受的等效力,本文研制了一种基于六轴力/力矩传感器的穿戴式指尖力测量系统。结果验证了该测量系统用于力反馈手套量化评价的可行性。
实验结果表明,本文提出的方法通过减少连杆的重量和惯量,通过减少每个手指4个关节的摩擦可以模拟自由空间的感觉。模拟自由空间时,平均等效阻力小于0.1N。利用气动驱动方法提供约束空间感觉,最大反馈力为4N,最大刚度为92N·m−1,且反馈力稳定。
未来研究计划在手套机构上增加微型力传感器,从而实现闭环力控制,提高力反馈精度。此外,为了提高力反馈手套的控制带宽,需要构建新的控制硬件和软件。通过手套与头戴显示器的集成,可以开发基于VR的电子购物等新型应用场景。最后,计划在穿戴者的手掌上添加分布式触觉反馈,以提供与手掌区域虚拟物体接触的感觉。
《致谢》
致谢
本课题得到国家重点研发计划项目“人机交互自然性的计算原理”(2016YFB1001200)和国家自然科学基金(61572055和61633004)的支持。
《Compliance with ethics guidelines》
Compliance with ethics guidelines
Yukai Zheng, Dangxiao Wang, Ziqi Wang, Yu Zhang, Yuru Zhang, and Weiliang Xu declare that they have no conflict of interest or financial conflicts to disclose.
《Appendix A. Supplementary data》
Appendix A. Supplementary data
Supplementary data associated with this article can be found, in the online version, at https://doi.org/10.1016/j.eng.2018.10.003.











 京公网安备 11010502051620号
京公网安备 11010502051620号




