
《1. 引言》
1. 引言
川藏公路位于中国青藏高原,目前面临着交通安全隐患和预算超支等严重的问题。川藏公路是世界上最高、最危险的公路之一:沿线最低的海拔仅500 m,而最高的海拔却超过了5000 m。为了克服巨大的地形高差,设计中被迫采用了长大纵坡和大比例的超长隧道以及大跨桥梁,以穿越复杂的山区地形。然而,这些措施却带来了严重的交通安全隐患。险峻的地形以及恶劣的山区气候,导致山区高速公路行车环境恶化,交通事故的发生频率和严重程度往往高于市区的公路[1]。直观的数据可以表明这一特征:该地区万人交通死亡率约为全国水平的2~3倍[2,3],而由于川藏公路工程的建设场地位于平均海拔3000 m以上的高山地区,人工和材料、机械运输费用远高于其他地区,该地区公路建设单价也约为周边城市公路的两倍。
为了提高交通安全性,传统的公路规划设计往往需要一种更为保守的解决方案,包括延长道路宽度以及增加线路长度,以此作为克服大高差的一种手段。然而,大部分改进都需要付出巨额的成本代价[4]。而公路的全寿命周期成本取决于其长度、几何参数和基础设施类型(即桥梁、隧道等),这些都是交通安全的深层次潜在因素[5–9]。因此,山区公路规划设计将面临以下两大挑战:① 山区公路巨大的地形高差使得搜索优化算法更容易陷入局部最优解,而非全局最优解;② 山区公路的成本超支风险和交通事故风险比一般的城市高速公路要显著得多,因此亟需一种既能提高安全、又能降低成本,兼顾两者的有效优化方法。
在现有的文献中,大部分关于公路优化设计的研究都是基于成本的单一目标优化方法[10–20]。显而易见的是,道路优化设计将大大降低公路的总成本,包括建设、运营以及用户成本。也有部分研究将安全事故的影响归纳入社会成本中(即事故成本)[15,17],最终通过最低总成本的方式确保安全。而更常见的做法则是将安全设计的内容作为约束条件引入优化模型的方式来保障公路优化设计方案的安全水平[12–14,16,21–24]。少部分研究则使用代理函数作为模型的验证指标来评估安全性[25–27],然而其函数中并没有考虑到安全相关的参数,如坡度和半径[27,28]。综上可见,现有的研究都只是在寻求一个成本最低的但符合安全设计约束的设计方案。其具体设计思路是:在满足现有设计规范的最低要求的条件下,尽可能地降低成本。
现行公路设计规范经常规定各种几何要素的允许值范围,如最大坡度和最小曲线半径,以确保使用者的操作安全。然而,符合设计规范并不意味着公路线形设计中的交通风险已经完全消除。首先,即使满足了公路线形的设计符合设计规范(如坡度≤4%),进一步的线形优化仍然可以显著降低事故率[29]。再者,在工程实践中,由于大多数安全改进都需要付出成本代价,工程设计人员由此将倾向于依据设计规范来采用成本最低的设计方案。而选取的设计方案将给交通安全带来严重危害,因此基于合规性检查的设计方法在地形复杂的山区并不适用。例如,在高差较大的两点之间进行公路定线的任务时,在不考虑所有其他因素,仅考虑合规性检查的前提下,一个理想解决方案将是连接这两点的最大允许坡度的最短设计方案(因为最小长度意味着最小的造价成本)。然而,更好的工程实践方法则是在预算限制内尽可能降低公路线形的整体风险水平,而不是仅仅满足设计规范的规定。另外,设计规范中并没有充分考虑风险因素的交互作用。例如,最新的研究表明,在单调半封闭的环境下,长纵下坡与公路隧道疲劳驾驶行为对山区公路交通事故将产生耦合的风险效应[30,31]。因此,为了确保风险水平在可接受的范围内,有必要采用一种基于安全风险评估的新设计优化方法,而不能仅仅局限于合规性检查。
本文提出了一种成本-安全最优平衡模型,用于识别和优化影响寿命周期成本和运营安全的公路规划设计变量。该模型不仅适用于公路线形问题,还可推广到其他高风险工程设计任务的多目标优化设计中。
本文的创新点在于从多个方面对公路选线的优化设计进行了改善:首先,提出了一种新的公路规划设计表示方法,为公路规划设计提供了成本和安全性能评价的依据;其次,将设计变量中的安全风险因素与寿命周期成本项目相关联,建立了一个综合评价模型,将成本与安全之间的关系联系起来;再者,从公路工程设计的角度,将故障树分析(fault tree analysis, FTA)与回归方法相结合,对交通事故原因进行建模。引入广义回归模型,建立了公路规划设计方案与其对应风险水平(预测交通事故率)之间的数学模型。同时,提出了一个可接受风险的评估框架,以确定最佳设计方案的适用性。最后,提出了一种考虑成本-效益分析的全局趋势和局部特征的计算算法,以达到成本与安全之间的均衡。
《2. 成本与安全的数学模型构造》
2. 成本与安全的数学模型构造
《2.1. 项目风险因素识别》
2.1. 项目风险因素识别
高速公路的交通安全形势是人-车-环境相互作用的结果[32]。尽管现有文献对交通事故的成因进行了大量的分析,但从工程设计的角度进行的研究却很少。本节使用FTA [33]方法建立工程设计与交通事故之间的联系。
图1为以交通事故为对象的故障树。其中交通事故为顶事件,工程设计因素为基本事件,这样设计的目的是建立起工程设计参数与交通事故之间的因果联系逻辑。值得注意的是,图1中的故障树是一种专门为设计方案安全分析而开发的新型故障树图(new fault tree analysis, NFTA)。NFTA和传统的FTA图有两个不同之处。第一,图1中的基本事件是某个公路项目中的决定因素,而FTA方法通常使用基本事件的预定发生概率来推断顶部事件的概率。第二,NFTA的变量之间的依赖关系是概率关系,而不是确定性关系[34]。例如,“驾驶员失误”是导致交通事故的重要因素,但“驾驶员失误”却并不一定会导致交通事故。在这方面,NFTA不同于传统的FTA假设。
《图1》
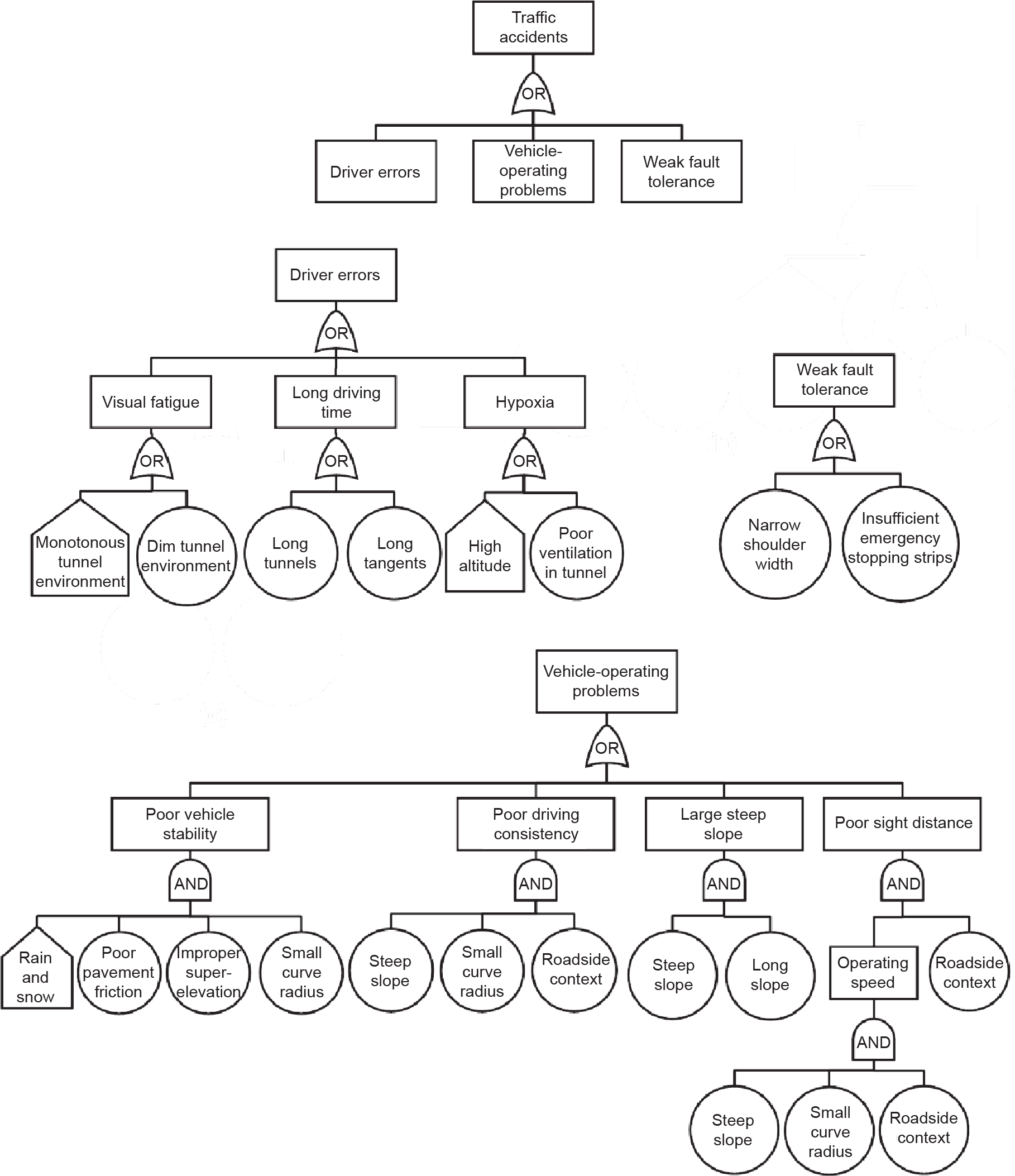
图1. 高速公路交通事故的NFTA模型。
图1中的NFTA表明,交通事故主要是由驾驶员失误、车辆操作困难以及道路容错率低这三方面原因引起的。
“驾驶员失误”是指,恶劣的公路设计可能对驾驶员的操作产生干扰等负面影响。例如,超长隧道和昏暗的驾驶环境是驾驶员疲劳的重要因素,这会延长驾驶员的反应时间,并经常导致事故的发生。山区公路在穿越高原地区时,假如隧道通风不良,则可能导致驾驶员缺氧,造成交通事故。
“车辆操作困难”是指,由于公路线形设计不良,即使驾驶员有足够的经验,车辆处于良好运行状态,也会增加车辆运行的难度和车辆故障的概率。已有研究表明,线性连续性在提供车辆实际操作与驾驶员期望之间的一致性方面起着至关重要的作用[35]。良好的线性连续性将极大地消除行驶过程中的意外和突然的变化,从而有效地降低事故发生的可能性[27]。线性连续性可分为三大类:车辆稳定性、区段内的运行速度连续性和连续区段间的运行速度连续性。其中,车辆稳定性分析了曲线区段上是否提供足够的侧摩擦以防止车辆侧滑。运行速度是指驾驶员在自由流条件下的车速,一般由公路线形几何参数确定。除上述的线性连续性标准外,较大的纵坡和较差的视距也给车辆控制带来很大挑战,可能导致意外事故发生。
“道路容错率低”是指,考虑到驾驶员的失误和车辆故障有时是不可避免的,高速公路的容错设施设计(如路肩和紧急停车带)可以有效降低交通事故率。
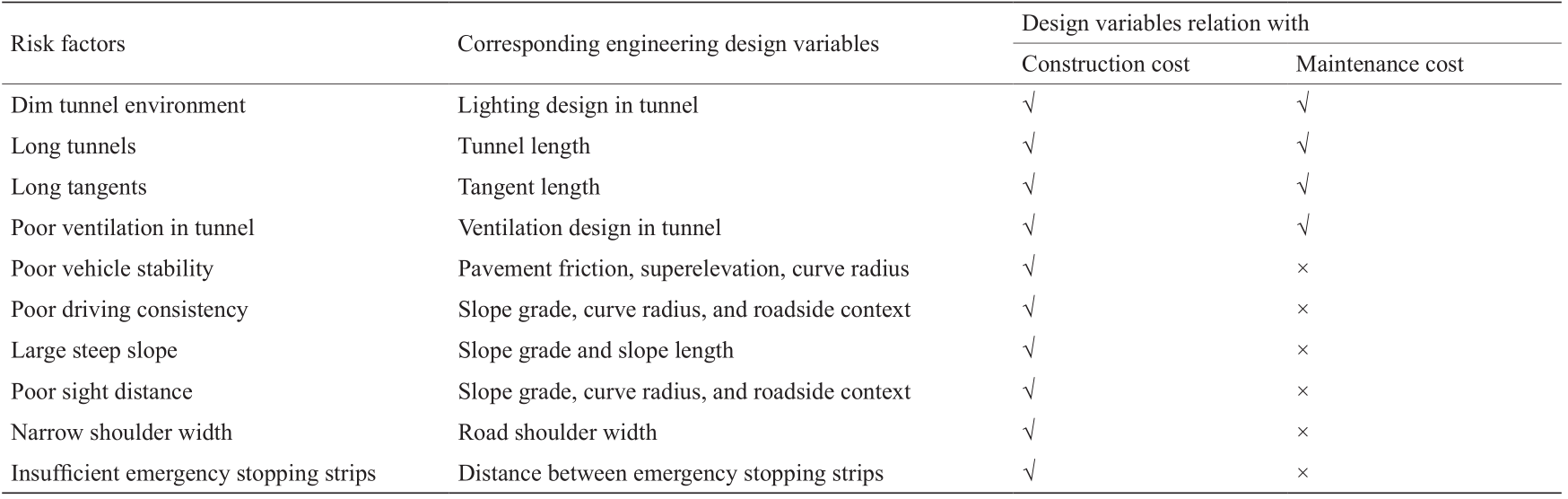
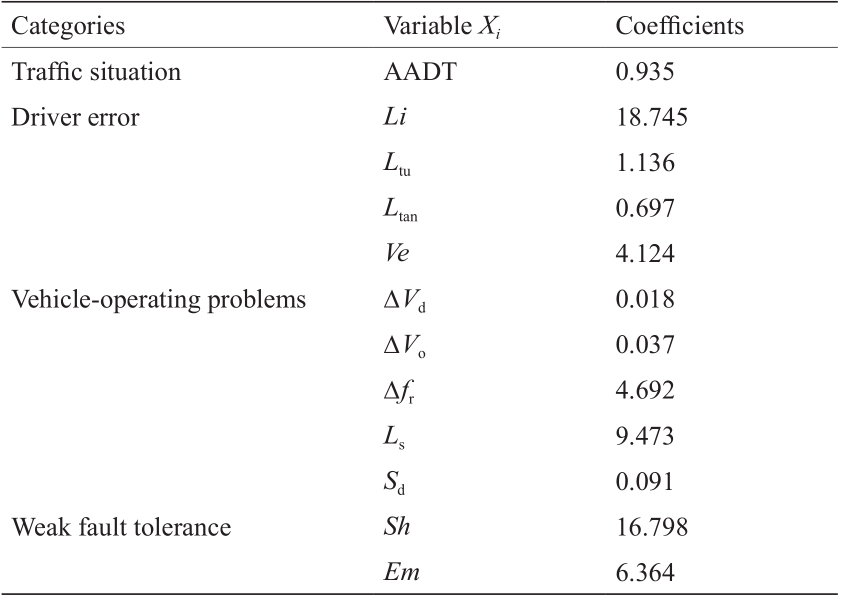
图1中通过NFTA模型描述了各种致险因素与交通事故之间的内在联系。但考虑到NFTA模型与FTA模型之间存在较大差异,传统FTA模型的推理方法在本研究中不适用。为了解决这一问题,本文将NFTA模型转化为广义线性回归模型,并在给定工程设计信息的情况下,计算某一公路路段的交通事故概率。模型的转化算法如下所示:首先,确定最小割集[36](即导致交通事故发生的最小的、必要条件)。然后,将最小割集转换为回归模型中的解释变量。特别的,NFTA中利用了“与”门将低层事件的信息结合起来计算高层事件的状态。表1提供了从NFTA图推断出的风险因素,这些风险因素将作为回归模型中的解释变量。
表1中列出的风险因素是山区公路规划设计的重要参数:这些风险因素不仅影响道路交通安全,而且更影响公路的生命周期成本。
《表1》
表1 高速公路交通事故风险清单
《2.2. 高速公路初步设计的决策变量》
2.2. 高速公路初步设计的决策变量
上一节中已经确定了交通安全的致险因素,本节进一步提出高速公路规划设计方案的参数化框架。该框架中存储着交通安全致险因素以及与全寿命周期成本分析相关的参数,以供后续分析时可以从该框架中提取相应参数。
 分别表示高速公路选线规划的起点和终点。进一步地,我们通过在线路中间设置关键点
分别表示高速公路选线规划的起点和终点。进一步地,我们通过在线路中间设置关键点 ,将规划线路分成若干小区段。
,将规划线路分成若干小区段。
如图2所示,线路将被分为若干直线段以及曲线段: ,
, 分别根据公式(2)和公式(4)构造。C 表示曲线段:
分别根据公式(2)和公式(4)构造。C 表示曲线段:

《图2》
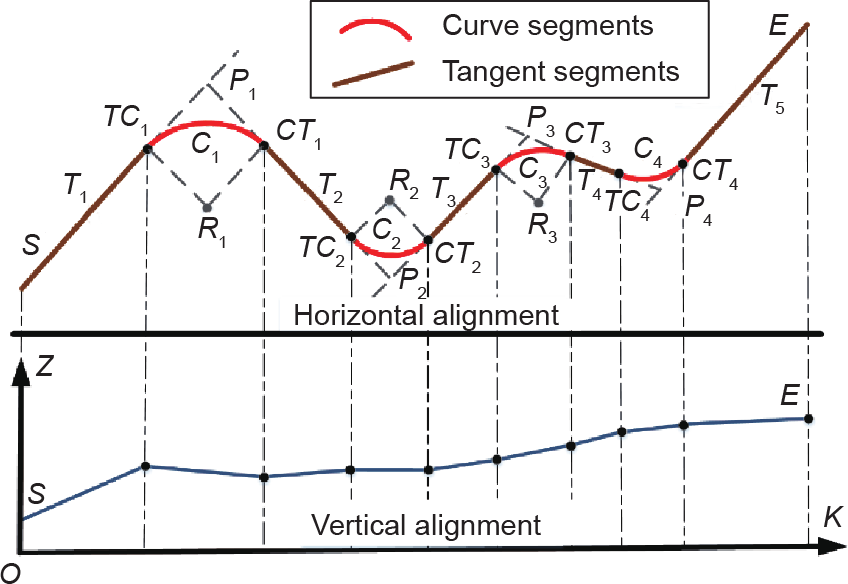
图2. 水平线形和垂直线形的对应关系。
其中包含着若干段曲线 :
:

其中在给定关键点的信息 以及曲率半径
以及曲率半径 时,曲线段两端交点的坐标
时,曲线段两端交点的坐标 以及
以及
 ,可以根据几何约束求解[37]。
,可以根据几何约束求解[37]。  表示某一区段的局部变量,而
表示某一区段的局部变量,而  表示不随区段变化的全局变量。例如,每个区段的超高一般不同,但每个区段的路肩宽度一般相同。
表示不随区段变化的全局变量。例如,每个区段的超高一般不同,但每个区段的路肩宽度一般相同。
T 表示直线段:

其中包含着若干段直线段 Ti :
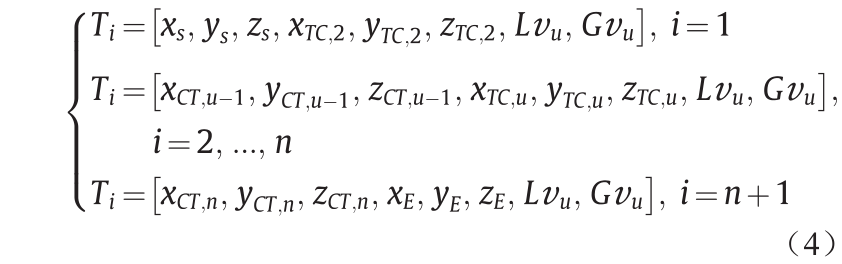
值得注意的是,直线段数目等于曲线段数目加1。
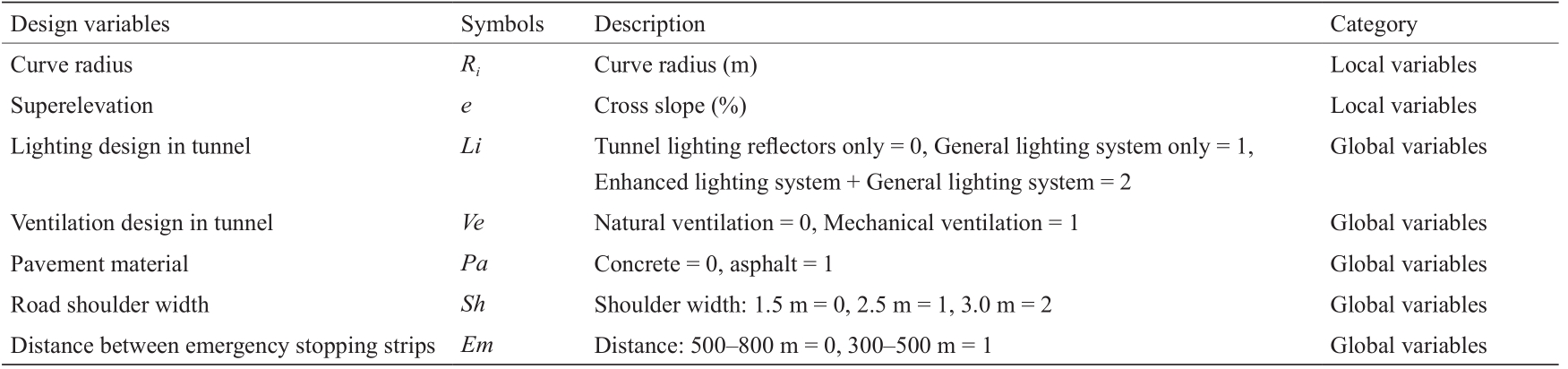
表2中列举了本文分析所需要的所有决策变量[除了公式(3)和公式(5)中定义的交点三维坐标]。应注意的是,其中某些变量为离散变量,其取值为有限的状态(比如隧道中的照明和通风设计)。
《表2》
表2 决策变量清单
《2.3. 全寿命周期的成本预估》
2.3. 全寿命周期的成本预估
全寿命周期的成本  以年平均费用表示,通过公式(5)计算。其中,表示资本回收系数,国内一般取0.065。
以年平均费用表示,通过公式(5)计算。其中,表示资本回收系数,国内一般取0.065。

其中


给定某一个规划方案 Ë 以及地形地貌信息(GIS数据),高速公路沿线的设施结构类型(桥、路堤、隧道、路堑)将根据各类设施的建设成本而被自动确定下来,如图3所示。例如,某一路段存在两种建设方案(隧道以及路堑),则程序将自动比较两种建设方案的建造成本,成本较低者将被自动定为建设方案。 LT 、 LB 分别表示隧道与桥梁的长度,其建造单价分别为 KTC 和 KBC 。建设成本 CC 为路、桥、隧以及道路附属设施的造价总和,见公式(6)。路的造价 CR 约等于挖土方(挖方成本为 CGC ,填方成本为CGF )以及路面工程( KPA LPA )的造价总和,其计算方法详见Hirpa等[37]的研究。除主体结构施工外,施工总成本还包括全线附属设施采购安装费,其单价定义为 KFC 。高速公路运营成本 CM 包括两部分:日常维护成本以及设施设备的运营成本,其单价分别定义为 KM 和 KO 。由于桥梁和道路作业几乎不需要任何救援或电气设备,因此桥梁和道路的运营费用与隧道相比可以忽略不计。
《图3》
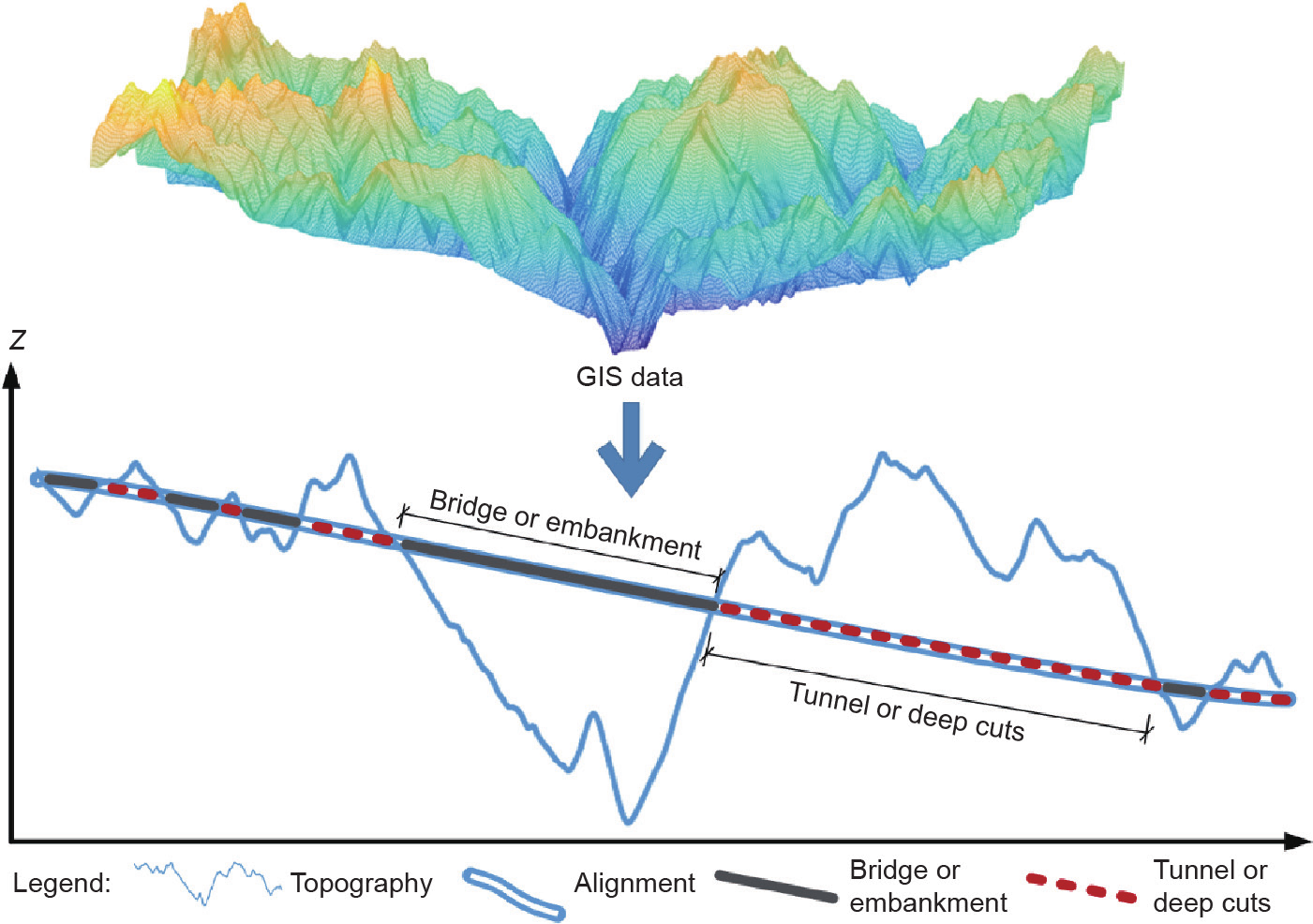
图3. 高速公路各类结构设施的智能布置。① 若Z(Alignment) > Z(Topography),桥梁或路堤;C(Bridge) < C(Embankment),桥梁;C(Bridge) >C(Embankment),路堤。② 若Z(Alignment) < Z(Topography),隧道或路堑;C(Tunnel) < C(Deep cuts),隧道;C(Tunnel) > C(Deep cuts),路堑。其中,Z:海拔;C:建造成本。
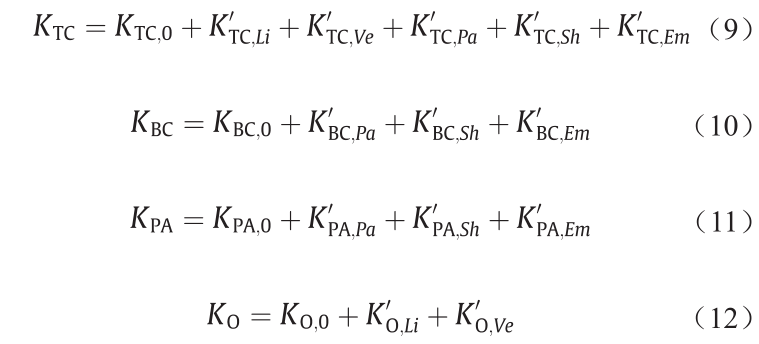
应注意的是,大部分单价指标,包括  以及
以及  ,都非固定值,将随着表2中决策变量取值的不同而变化。公式(9)~(12)为本文中所用到的各个单价指标的计算方法。
,都非固定值,将随着表2中决策变量取值的不同而变化。公式(9)~(12)为本文中所用到的各个单价指标的计算方法。  表示某一单价
表示某一单价 
 的基础价格,即所有的决策变量
的基础价格,即所有的决策变量 
 取“0”时的单价水平。而
取“0”时的单价水平。而  表示由于决策变量
表示由于决策变量  不取“0”时带来的额外成本。
不取“0”时带来的额外成本。
详细的 指标将列举在本文的案例中。
指标将列举在本文的案例中。
《2.4. 交通事故率的预估》
2.4. 交通事故率的预估
为了预估高速公路段的交通事故率,从交通管理部门处采集了与建设项目同一地区的交通事故信息。进而从交通事故报告中提取公路的几何数据、交通报表数据和事故数据,利用多元回归分析的方法,建立了交通事故率与致险因素之间的数学函数模型[38,39]。本文采用了风险水平函数(safety performance function,SPF)来评价某一路段的安全风险水平。风险水平函数是由美国国家公路和运输官员协会(American Association of State Highways and Transportation Officials,ASSHTO)首次提出的公路风险水平分析方法,后来获得广泛的应用[40]。风险水平函数[41,42]利用已知的道路特征参数来预估道路的交通事故率,该方法在众多公路设计软件中也到了应用,包括Interactive Highway Safety Design Model [43], SafetyAnalyst [44]和Crash Modification Factors Clearinghouse [45]。公路的风险水平通过 来表示,其计算方法见下式:
来表示,其计算方法见下式:

式中, Li 为 i 区段长度; ëi 为第 i 区段的事故率,通过广义线性回归模型建立了解释变量与年碰撞频率之间的数学关系[5]:

式中, 区段年均事故率;
区段年均事故率; 表示 i 区段的决策变量(从图1中提取),详见表3;
表示 i 区段的决策变量(从图1中提取),详见表3;
 表示各个决策变量对应的回归系数。
表示各个决策变量对应的回归系数。
《表3》
表3 致险因素相关的解释变量列表[5]

一般情况下,假设 Yi 服从负二项分布[46],其方差为 则 i 区段的负二项回归模型为
则 i 区段的负二项回归模型为

式中, 为伽马函数;
为伽马函数; 为散度参数。
为散度参数。
回归系数  通过最大似然法估计而得,可以通过SAS软件中的GENMOD 程序进行计算[47]。应注意的是,在将SPF模型用于实际项目前,需进行各种统计检验,包括拟合优度检验、显著性检验和残差分析[48]。
通过最大似然法估计而得,可以通过SAS软件中的GENMOD 程序进行计算[47]。应注意的是,在将SPF模型用于实际项目前,需进行各种统计检验,包括拟合优度检验、显著性检验和残差分析[48]。
《3. 成本 - 安全的优化以及平衡方法》
3. 成本 - 安全的优化以及平衡方法
《3.1. 可接受风险检验》
3.1. 可接受风险检验
 表示定义在 n 维欧氏向量空间中的设计空间。每个可能的规划设计方案表示为 Ë = ( C , T ),该方案也可以表示为 Ë = ( P , Lυ , Gυ )。其中, P = ( P1 , ..., Pk )含有 k 个关键插入点的三维坐标信息、曲率半径信息。 Lv = ( Lυ1 , ..., Lυ2k + 1 )含有 k 段曲线段以及 k + 1段直线段的局部变量信息, Gv 含有所有区段全局变量的信息。
表示定义在 n 维欧氏向量空间中的设计空间。每个可能的规划设计方案表示为 Ë = ( C , T ),该方案也可以表示为 Ë = ( P , Lυ , Gυ )。其中, P = ( P1 , ..., Pk )含有 k 个关键插入点的三维坐标信息、曲率半径信息。 Lv = ( Lυ1 , ..., Lυ2k + 1 )含有 k 段曲线段以及 k + 1段直线段的局部变量信息, Gv 含有所有区段全局变量的信息。
公路规划设计的成本与安全双目标优化问题可表述为

本文采用了非支配排序遗传算法II(non-dominated sorting genetic algorithm II, NSGA-II)来求解最优的设计方案[49]。种群中的每个个体都需要计算两个指标:非支配等级和拥挤距离。通过在不同解之间比较这两个指标,选择适应度更高的个体,并通过基本运算(交叉算子、变异算子、插入算子、直算子)生成下一代群体[13,14,24]。图4中展示了优化的过程:帕累托前沿在每一代优化中不断向全局最优解推进,直到收敛。
《图4》
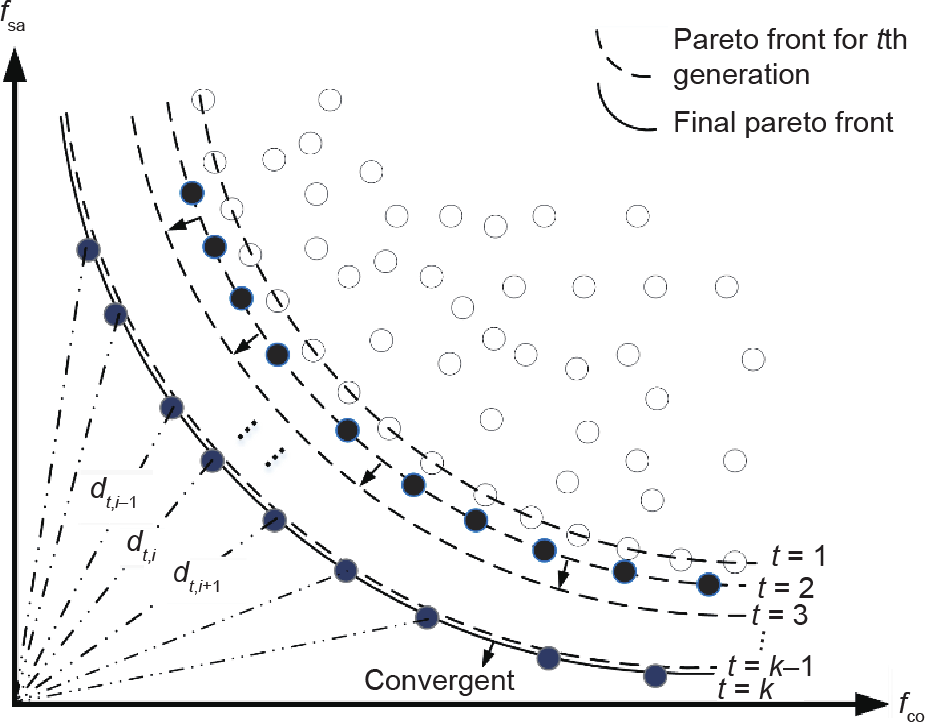
图4. 帕累托前沿的生成过程。
当帕累托前沿收敛时,前沿上的所有解都是非支配解。然而,与其他优化目标(如环保目标[50]以及在途时间目标[17])相异,行车安全是极为重要的问题,不能仅仅依据成本效益分析来衡量解的优劣:所有的解都必须通过风险评估框架以进一步检查,以确定它们是否在可接受的风险范围内。
为了确定可容许的风险水平,荷兰住房、空间规划和环境部(Dutch Ministry of Housing, Spatial Planning, and Environment, VROM)提出了一套风险水平检查框架[51,52],而这一框架在后续的研究中也得到了逐步的改善[53–56]。根据决策管理人员的视角不同,可接受风险有两重含义。第一重含义是个人可接受的风险水平,定义为“个人可能因从事特定活动而承受的风险水平”[55],其计算方法如下[54]:

式中,  为个人可接受风险;
为个人可接受风险;  为交通事故的死亡率,一般取0.4%~10% [57–59],本文保守地取为10%。
为交通事故的死亡率,一般取0.4%~10% [57–59],本文保守地取为10%。 为政策因素,反映了公众对该项活动(即交通出行)的可接受风险水平的态度,其取值一般最低为0.01(如液化石油气场的建设活动),最高为100(如登山活动);对交通出行而言,一般取为1.0 [55]。从个人角度来看,涉及死亡的严重交通事故的概率应满足以下要求:
为政策因素,反映了公众对该项活动(即交通出行)的可接受风险水平的态度,其取值一般最低为0.01(如液化石油气场的建设活动),最高为100(如登山活动);对交通出行而言,一般取为1.0 [55]。从个人角度来看,涉及死亡的严重交通事故的概率应满足以下要求:

式中,  为个人在公路上发生事故的概率,它是依据预测的事故频率
为个人在公路上发生事故的概率,它是依据预测的事故频率 (acc·km–1 ·a–1 )来计算的:
(acc·km–1 ·a–1 )来计算的:

式中, Vd 为设计速度; L 为工程全线长度;AT为年交通量。考虑到驾驶人员(即用户)每天只花费一部分时间( L /24 Vd )用在该路线的交通出行,其等价的年均交通事故率  应在 的基础上扩大相应的比例。
应在 的基础上扩大相应的比例。
除了个人可接受的风险,社会(国家)可接受的风险水平也是从国家角度反映风险评估的重要考虑因素。为满足这方面的要求,应满足以下条件[55]:
式中,  为工程所在国家按该工程风险推算的交通事故的死亡总人数;
为工程所在国家按该工程风险推算的交通事故的死亡总人数;  为社会群体对重大伤亡事故的风险规避修正;
为社会群体对重大伤亡事故的风险规避修正;  为国家的人口总数;
为国家的人口总数;  为国家的高速公路总长度(中国约为1.31×105 km)。
为国家的高速公路总长度(中国约为1.31×105 km)。
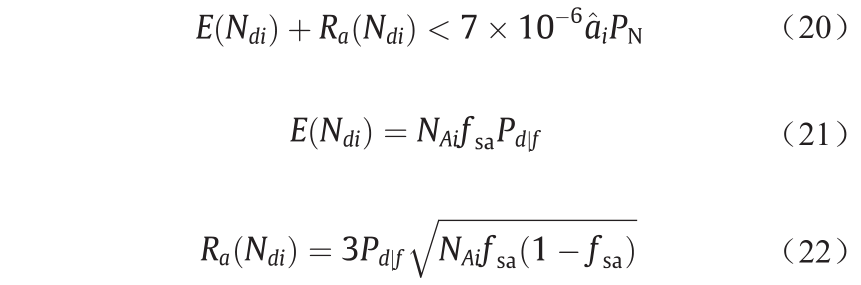
只有同时满足公式(18)与公式(20)的解,才能被认定为风险可接受的解,详见图5。
《图5》
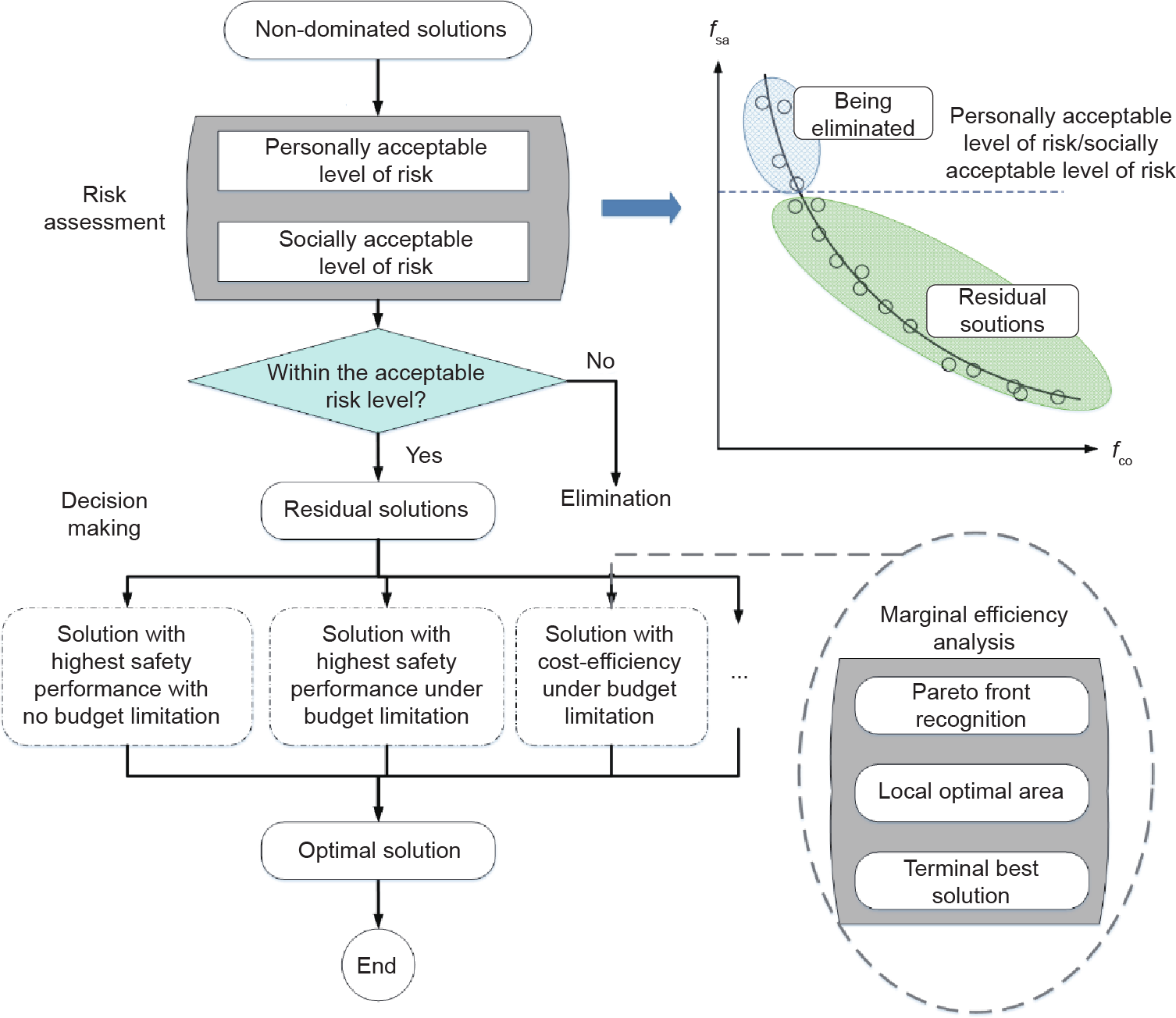
图5. 高速公路选线规划决策过程中的风险评估框架。
《3.2. 安全改善的边际效益分析》
3.2. 安全改善的边际效益分析
给定帕累托前沿收敛时的非支配解,决策者可以根据自己的偏好从中选取一种方案。本文提供了三种常用的决策策略。第一种策略是选择具有最高交通安全水平的解作为最优方案,这种策略基于无限预算的假设。第二种策略是在预算限制下选择具有最高交通安全水平的解。第三种策略则是基于边际效率分析选择高成本-效益的解作为最优解,其计算方法将在本节中详细说明。应注意的是,这三种策略都是可行的,具体采用的决策策略根据项目具体情况而定。
给定预算范围内的非支配解,本文提出了一种基于边际效率分析的方案优选方法。边际效率是指由于额外的单位投资额度而导致的安全水平的提高程度。考虑到边际效用递减规律[60],如图6所示,帕累托前沿存在一个成本效益最优点,满足最低边际效率的要求。
《图6》

图6. 高成本效益解的优选方法。
假设帕累托前沿的拟合曲线为  ,则其上每一点的近似边际效率
,则其上每一点的近似边际效率  可以根据公式(23)求解。
可以根据公式(23)求解。

从图6可见,在成本较低阶段,安全改善的边际效益是非常明显的。然而随着成本的增加,安全改善的边际效益逐渐降低,逐渐趋于“0”。因此,我们定义了安全改善的边际效益阈值 τ :当 ≥ τ 时,以额外成本为代价来改善安全是具有合理的成本效益的;而当 = τ 时,则意味着其对应的  解为值得改善安全的极限投资点,也就是第三种决策策略的最优解。
解为值得改善安全的极限投资点,也就是第三种决策策略的最优解。
由于拟合曲线只反映整体形状,而不能反映帕累托集合的局部分布,因此采用两阶段筛选算法来进行边际效率分析。
步骤1 :采用曲线拟合方法,通过Matlab工具拟合帕累托前沿线,然后求解其曲线导数,将拟合曲线转化为边际效率曲线,详见公式(23)。通过预先设定的阈值 τ (本文设为0.5)来确定最优解所在的布局区域。此处局部区域被人为定义为与 Pt′ 距离最近的5个候选解  5),其中
5),其中  为满足
为满足  条件的帕累托前沿线上的点。
条件的帕累托前沿线上的点。
步骤2 :5个 候 选 解  根 据
根 据 ( i = 1, 2, 3, 4 )依次计算它们的边际效率。每一次安全改善行动
( i = 1, 2, 3, 4 )依次计算它们的边际效率。每一次安全改善行动  都需要满足成本效益的阈值条件
都需要满足成本效益的阈值条件
 ,直到成本效益的阈值条件不被满足时的解
,直到成本效益的阈值条件不被满足时的解  被确认为最优解。
被确认为最优解。
《4. 案例分析》
4. 案例分析
本节将上述方法应用到川藏公路北线环境最复杂的区域——达马拉山的公路规划选线设计中。项目的起点为昌都市(97°10′18′′ E, 31°08′34′′ N, 3283.000)、终点为妥坝乡(97°31′33′′ E, 31°17′07′′ N, 4000.000)。如图7所示,一条既有的国道(G317)通过峡谷连接这两个地点。然而,为了缩短路线长度,扩大道路容量,国家计划在该区域建造一条新的高速公路。工程师提出了四个待选的走廊带,如图7所示。其中走廊带A因为与既有的G317国道相比,线路并没有显著缩短而被首先排除。剩下的三个走廊带将作为遗传算法的初始解输入到NSGA-II模型中求解。
《图7》
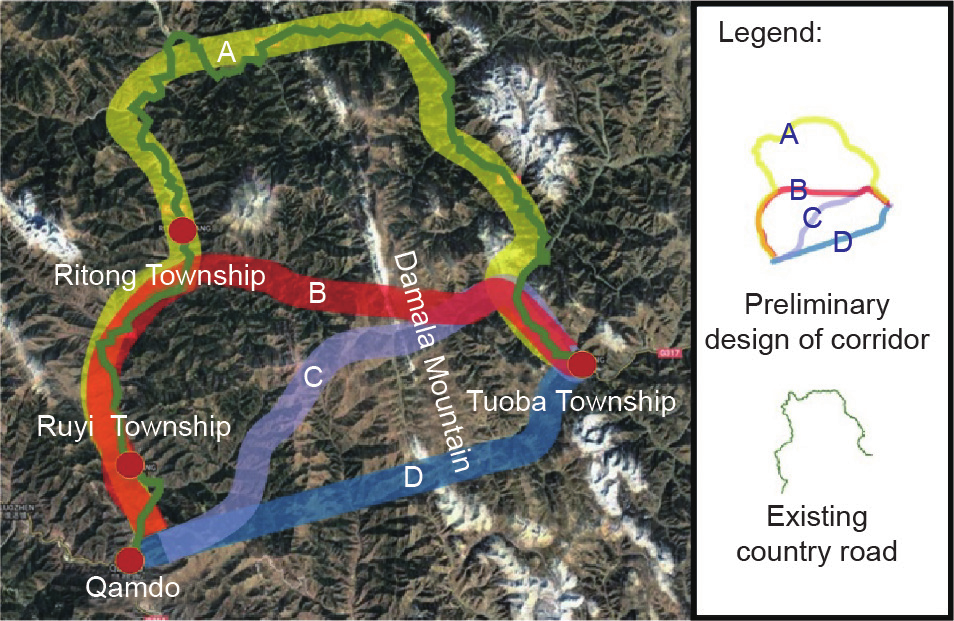
图7. 案例所在的区域背景。
《4.1. 基础数据信息》
4.1. 基础数据信息
本研究需要三种类型的数据:地形高程数据、研究区域的交通事故数据、成本等其他模型相关参数。
首先,利用Global Mapper 软件将目标区域的DEM数据转化为点云数据类型,其中存储每个平面点的高程数据。然后,点云数据被输入到Matlab软件中重构数字高程模型(digital elevation model, DEM),详见图8。
《图8》
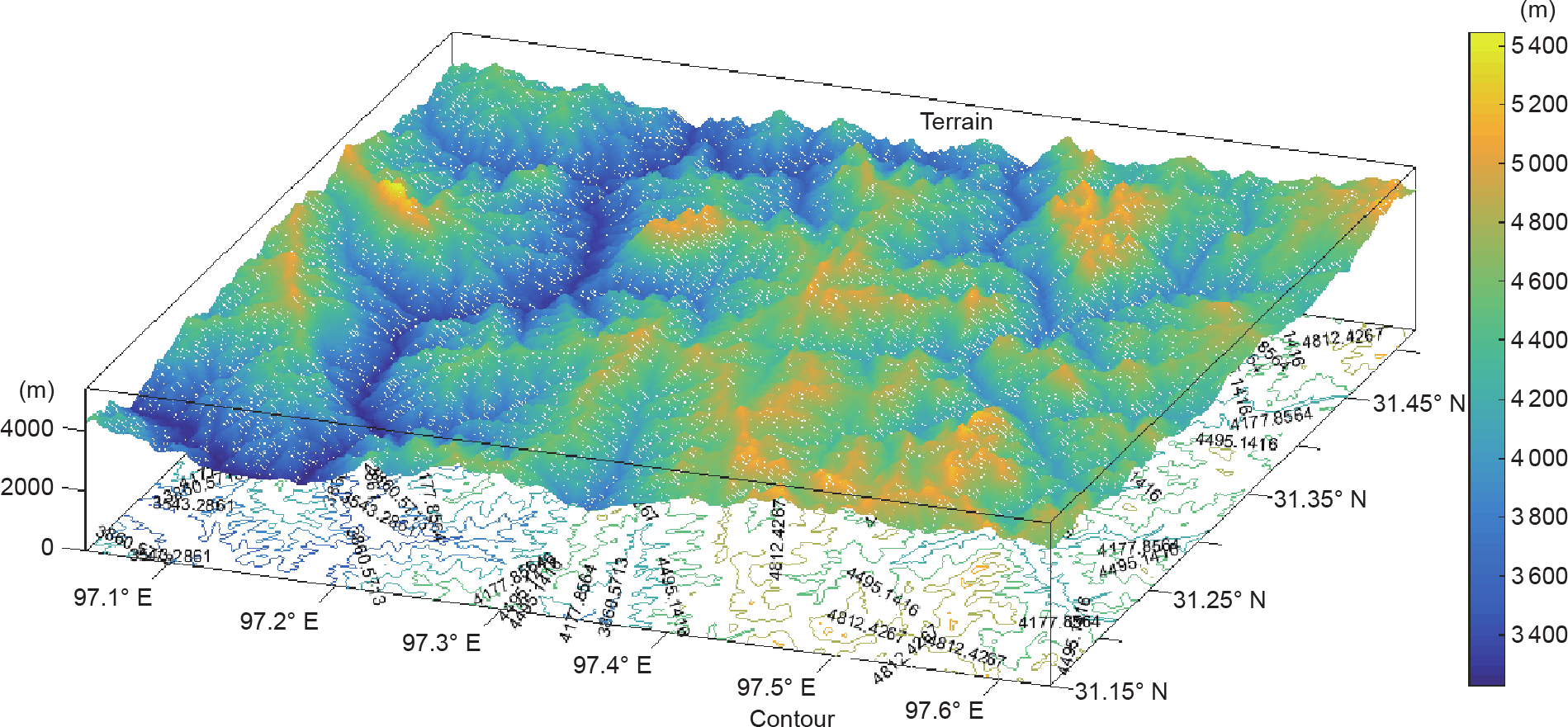
图8. 研究区域的数字高程模型。
从当地公路管理部门采集了研究区域的交通事故数据(包括道路参数和交通状况数据),数据主要包括2014—2017年间该路段共发生的1375起车祸信息。回归系数采用极大似然法估算,结果见表4。
《表4》
表4 回归系数的估计结果
成本以及其他模型相关的参数如表5所示。
《表5》
表5 成本以及其他模型相关参数

H: bridge pier’s height.
《4.2. 结果分析》
4.2. 结果分析
目标区域的DEM模型以及初始个体的线型参数构成了模型启动的输入数据。经过数百代的优化求解,图9展示了NSGA-II 模型在设计空间中的搜索足迹。显而易见的是,局部最优解附近的设计空间都经过了仔细的搜索。
《图9》
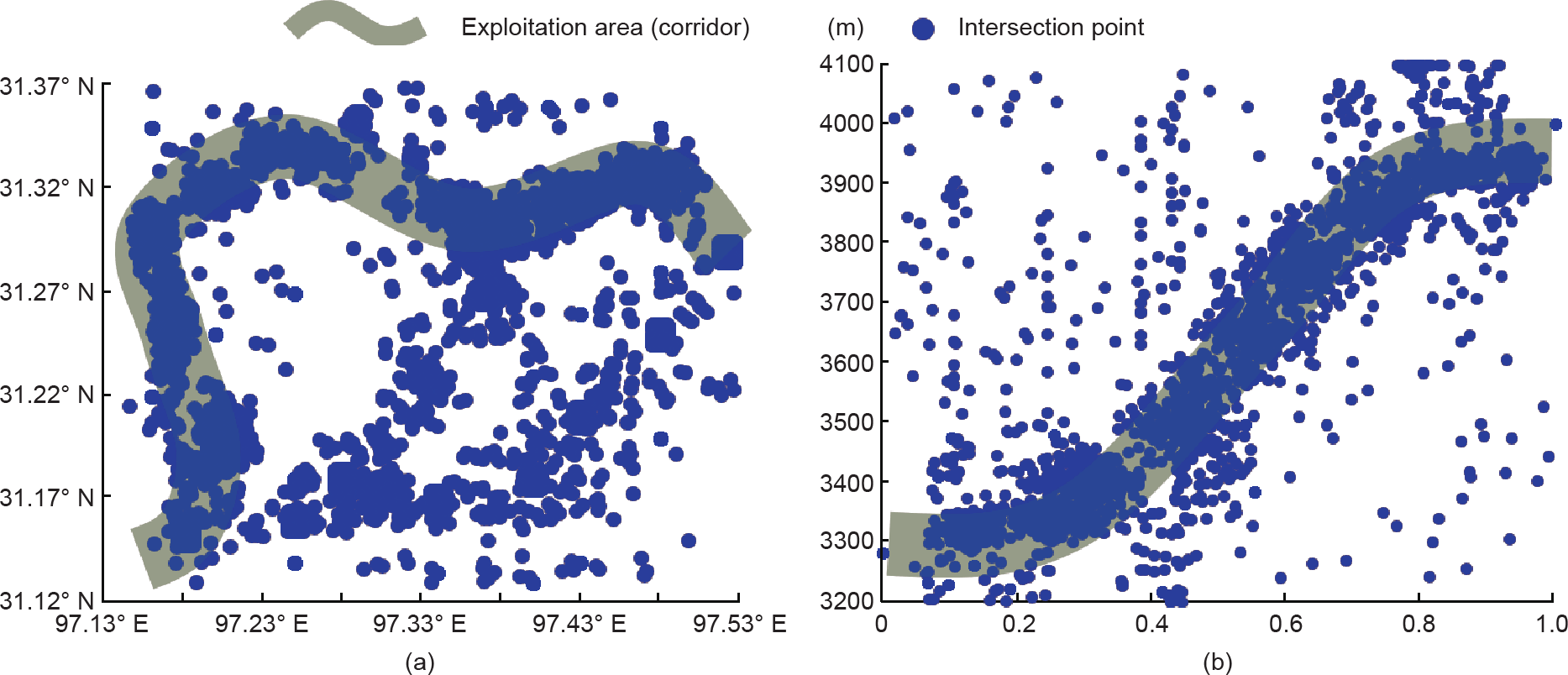
图9. 高速公路选线优化中的设计空间搜索。
图10中展示了随着迭代次数增加,安全水平改善的过程:与安全相关的各个指标,包括 ,都得到了逐渐的改善,使得预期的交通事故率得以显著下降。可以发现,全局变量(包括
,都得到了逐渐的改善,使得预期的交通事故率得以显著下降。可以发现,全局变量(包括  )收敛的速度比局部变量要快。图11中展示了随着迭代次数增加,项目成本的优化过程,包括各项细分工程的成本变化情况。
)收敛的速度比局部变量要快。图11中展示了随着迭代次数增加,项目成本的优化过程,包括各项细分工程的成本变化情况。
《图10》

图10. 优化过程中安全水平的变化情况。(a) 安全风险水平(因变量);解释变量包括:(b)∆Vo ,(c)ΔVd ,(d)Δ fr ,(e) Sd ,(f) Ltu ,(g) Ltan ,(h) Ls ,(i) Li ,(j) Sh ,(k) Em 。
《图11》
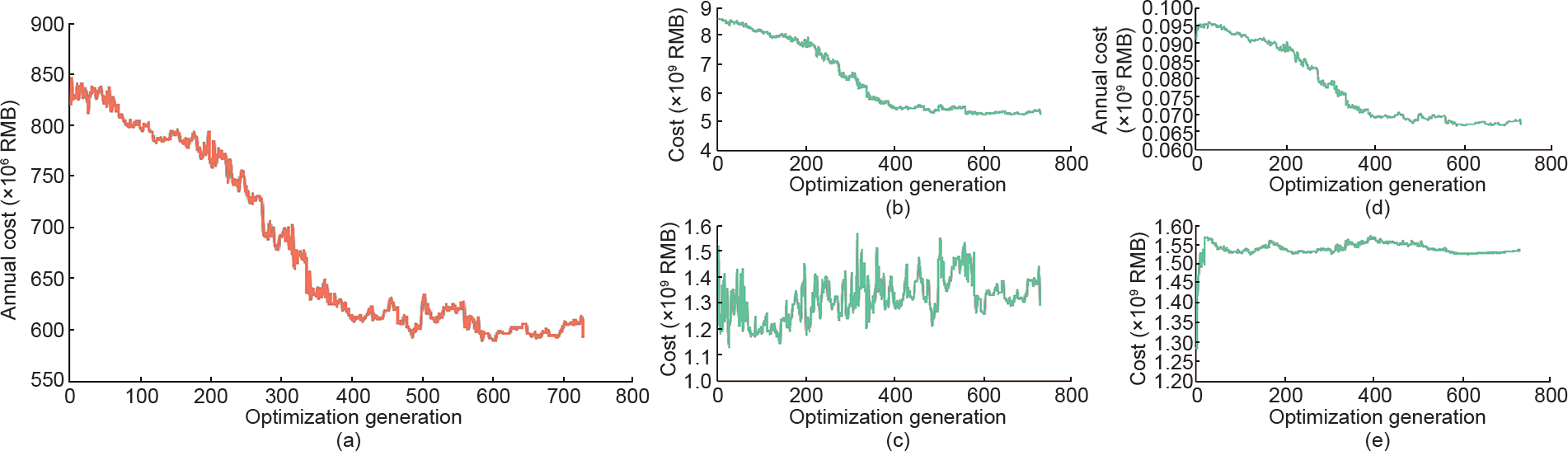
图11. 优化过程中成本的改善情况。(a)项目的年均全寿命周期成本;(b)隧道建设成本;(c)桥梁建设成本;(d)运营费用;(e)道路建设费用。
随着优化的进程推进,逐渐发现了走廊带B更具有优化的潜力:走廊带B具有最短的隧道长度,由此极大地降低了它的建设成本以及运营成本。图12展示了搜索程序的性能优化情况:在迭代过程中,项目安全与成本都同时得到了优化。搜索程序在#729代中,收敛条件得到满足,搜索程序终止。根据公式(19)和公式(20)得到个人的可接受风险 = 52.731 acc · k –1 ·a–1 ,国家的可接受风险水平
= 52.731 acc · k –1 ·a–1 ,国家的可接受风险水平 = 0.744 acc · km–1 ·a –1 。进而发现#729代的所有非支配解都满足个人可接受风险与国家可接受风险要求。
= 0.744 acc · km–1 ·a –1 。进而发现#729代的所有非支配解都满足个人可接受风险与国家可接受风险要求。
《图12》

图12. 成本-安全优化过程。
如图12所示,该案例中提出了3个最优解:最优解1在不考虑预算限制内具有最高的安全水平;最优解2在一定的预算限制(7亿元)内具有最高的安全水平;而最优解3考虑预算限制内,具有较高的成本效益。这3个最优解的详细信息如图13所示。
《图13》
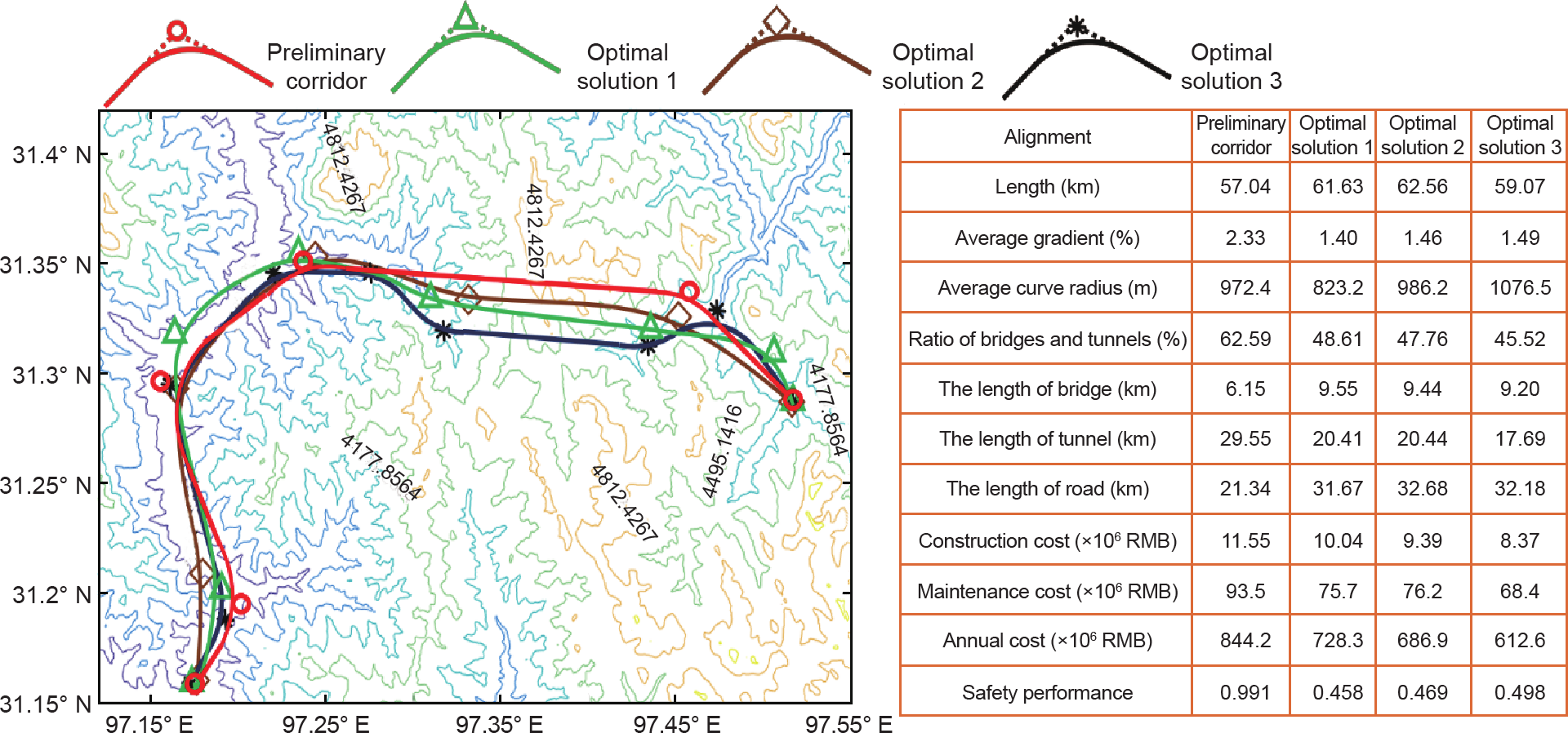
图13. NSGA-II算法智能生成的最优解信息。
《5. 讨论与结论》
5. 讨论与结论
本文实验结果表明,该模型能够产生高质量的解,并能达到降低成本和事故率的目的。另外,研究中发现,国家可接受的风险水平远远低于个人可接受的风险水平。这是由于,对于个人来说,在该公路上发生交通事故而死亡的可能性相对较低——即使发生了交通事故,极大的可能只是一般事故或者受伤事故 [31]。因此,该项目预期的死亡人数与航空运输活动相比并不是很高[55]。然而,对整个社会而言,按项目现有的事故风险水平推算的全国高速公路死亡人数却是十分可观的[61,62]。由于国内高速公路总里程长度非常长,由此推算的总死亡人数将极容易达到阈值。
在实验中,优化过程以及搜索空间的范围都得以充分展示。通过NSGA-II模型,案例中共生成了143 314个新的解。第728代解的平均年均成本为6.101×108 元,而第1代解的平均年均成本为8.212×108 元,后者约为前者的1.35倍。相似的,第728代解的平均安全水平为5.84,第1代解的平均年均成本为9.74,后者约为前者的1.67倍。由图10可见,规划设计的安全优化主要是通过缩短隧道和陡坡的长度,提高线形连续性来实现的。全局变量的快速收敛可能表明,在照明、通风、道路宽度和紧急停车带设计方面的改进是有价值的,因为它们以较低的成本显著提高了运行安全性。
本文提出了一种兼顾成本与安全的山区公路线形设计新框架。本文对公路线形问题的贡献如下:① 结合了FTA模型与回归分析方法,建立了交通事故与道路设计参数之间的关联。提出了NFTA模型,用于识别设计参数中影响运营安全的关键风险因素。然后,引入了广义线性回归模型来预估公路选线的安全水平。② 公路规划设计决策变量以一种新的参数化形式排列,打下了成本和安全水平分析的基础。③ 在成本评价预估函数中建立了公路规划设计全寿命周期成本与风险因素状态之间的关系。用方程组模拟了风险因素对寿命周期成本的影响。④ 引入可接受风险理论,探讨了拟建线路中个体和社会对公路安全的态度。⑤ 提出了一种基于边际效率的计算方法,以求解候选最优解中的成本效益解。
本文仍有以下改进空间:由于SPF模型是使用从工程项目所在区域收集的交通事故数据进行训练的,建议其他学者在实际的项目操作中不要将该模型的回归系数直接应用于其他区域项目,因为忽视空间异质性可能导致参数偏差和模型误判。在未来的研究中,为了考虑非结构化和空间结构的异质性,可以研究空间变系数模型。
综上所述,本文建立了山区公路建设项目全寿命周期成本与交通安全之间的关系,并在可接受的风险水平内不断优化,以达到最优的平衡解。该方法可用于其他高安全风险工程项目的合理投资分析和多目标优化应用中。
《致谢》
致谢
本文作者衷心感谢方琦、郭健、吴孝敏等的帮助,同时感谢国家自然科学基金(71732001、51878311和51678265)以及中国工程院咨询项目(2017-XZ-12)对本文研究的支持。
《Compliance with ethics guidelines》
Compliance with ethics guidelines
Chengqian Li , Lieyun Ding, Botao Zhong declare that they have no conflict of interest or financial conflicts to disclose.











 京公网安备 11010502051620号
京公网安备 11010502051620号




