
《1. 引言》
1. 引言
近年来,河漫滩已引起越来越多的关注。这种兴趣反映了漫滩和河流廊道在景观中的生态意义、它们作为河流与周围土地之间的缓冲带的重要性,以及它们在为防洪提供蓄水能力的作用。人们也日益认识到它们吸纳河流沉积物以及相关营养物质和污染物的潜力的重要性。由于其动态特性,河流泛滥区中存储的沉积物在未来可以进行再加工,并可能对未来的河流管理提出挑战 [1]。鉴于这一背景,显然有必要进一步了解洪水地貌的演变及其在泥沙动力学中的作用。
近几十年来,由于修建水坝,韩国形成了许多人工湖。其中一个湖就是昭阳湖,其建于1973年,位于昭阳河大坝后面。昭阳湖(图1)是韩国最大的湖,与江原道的春川市、杨口郡和麟蹄郡接壤。其流域面积为 2703 km2 ,水库蓄水量为2.9×109 t,是内海。昭阳湖被广泛用作水力发电、防洪和供水的环境资源。湖水汇入汉江和北河,并被用作包括首尔在内的大都市地区的主要水源。昭阳水坝的防洪能力为5×106 m3 ,这避免了大都会地区遭受洪水的侵袭,并有助于推动其经济增长。然而,昭阳湖水库可能会对位于下游的大都市地区产生不利影响。2015年累计降雨量为780.4 mm,为正常值(1241.5 mm)的62%。因此,包括汉江流域在内的国家多用途大坝的水库水量已大幅减少,维持大都市地区的供水也变得困难。Shin等[2]利用从2010年至 2015年Terra中分辨率成像光谱仪(MODIS)卫星图像获得的植被信息,研究了昭阳湖流域的干旱严重程度,以便有效管理昭阳湖的水资源,为抵御干旱损害做好准备。Lee等[3]利用Landsat卫星图像研究了昭阳湖表面积的变化。
《图1》
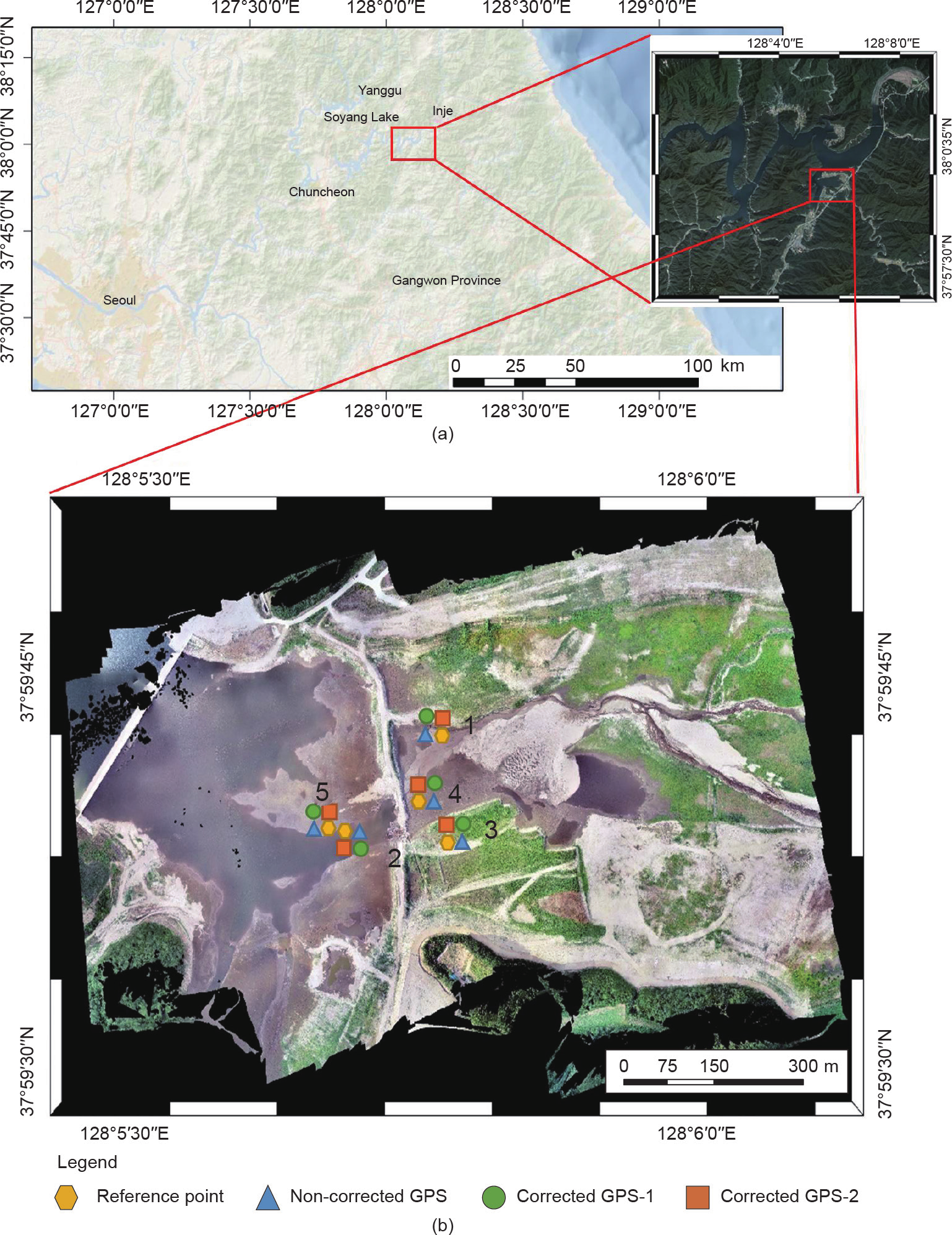
图1.(a)研究区域在卫星图像上的位置;(b)使用无人机成像技术和GPS绘制采样点拍摄的数字航拍照片。
遥感技术可以定期地获取数据,为大规模监测漫滩的季节变化和水文格局提供了一种经济有效的手段。 Landsat和MODIS时间序列图像已被用于绘制土地覆盖图并监测大型湖泊和湿地的淹没区域的时间变化[4–6]。然而,卫星数据的分辨率较低,因此不能用于小范围的研究。基于这个原因,使用无人机的遥感方法已被广泛用于各种研究和操作领域中。由于用于数据记录及控制系统的传感器和机载电子设备的小型化,越来越多的传感器[如光学相机,光成像、探测和测距(LIDAR)以及高光谱相机]可以从无人机上操作,充分利用电磁频谱进行遥感[7]。使用无人机进行的摄影测量对山区[8]、农业地区[9]、河流和沿海地区[10]的环境监测非常有用。无人机可以提供比航空摄影测量法或LIDAR航空地形测量系统更高时间频率的测量。由于它们不受与其他飞机相同的规则约束,因此无人机可以在低空飞行,这对于提高数据的分辨率和准确性至关重要。
除了利用遥感技术进行监测之外,还需要采集实地数据来进行样品分析。对本研究中采集的样品进行分析,以确定其颗粒细度和含水量,并在垂直和水平方向上对其进行测量,以便于预测缺口运动。先前的研究已经分析了缺口移动影响流量,进而影响水质,并利用这些信息来确定最佳的保护方法[11–14]。在本研究中,我们旨在通过对现场测量数据进行沉积物细度和含水量分析来调查研究沉积物。使用全球定位系统(GPS)标记采样点,并使用无人机捕获该位置的图像。从无人机图像中,我们获得了数字高程模型(DEM)数据。结合GPS和DEM数据的实地测量将能更精确地分析和监测昭阳河的沉积速率。
《2. 材料和方法》
2. 材料和方法
《2.1. GPS 和现场数据测量》
2.1. GPS 和现场数据测量
GPS是一种跟踪时间和位置的无线电导航系统,在环境研究、自然资源管理、地理信息系统(GIS)数据收集、全球大地测量和其他测量中有着广泛的应用。 GPS通过跟踪卫星不断发送到世界各地的电磁波来工作,系统可以根据这些电磁波确定天线的位置(经度、纬度和高度,或者X、Y和Z坐标)。可参见文献[15]中的GPS的简明介绍。
本研究中使用的数据来自实地调查。我们在实地调查中使用无人机收集了航空照片,以获得更准确的数据。无人机使用Agisoft Photoscan (Agisoft LLC,俄罗斯)生产的摄影扫描仪拍照。可以根据从无人机上获得的三维(3D)图像数据创建DEM,该无人机已经过处理以确定沉积物高度。根据Sona等[16]的研究,Agisoft Photoscan比其他同类软件更可靠。该软件在Windows 系统上运行,可以从静态图像(如JPEG、TIFF或PNG)构建专业的3D内容[17]。Agisoft Photoscan被广泛用于生成数字表面模型(DSM)[18],并已应用于地面和航空摄影测量[19]。
生成DEM需要四个步骤:第一,使用无人机收集航拍照片;第二,利用Agisoft Photoscan软件对图像进行处理,该软件具有三级精度和质量要求,准确度级别是软件自动生成的内置参数;第三,分析DEM数据以确定最适合DEM的准确度[20–23];第四,提取3D图像,并在拍摄数据的位置替换GPS数据。我们将校正和未校正的GPS数据与使用无人机拍摄的图像数据进行比较,以确定5个采样点的位置[图1(b)]。
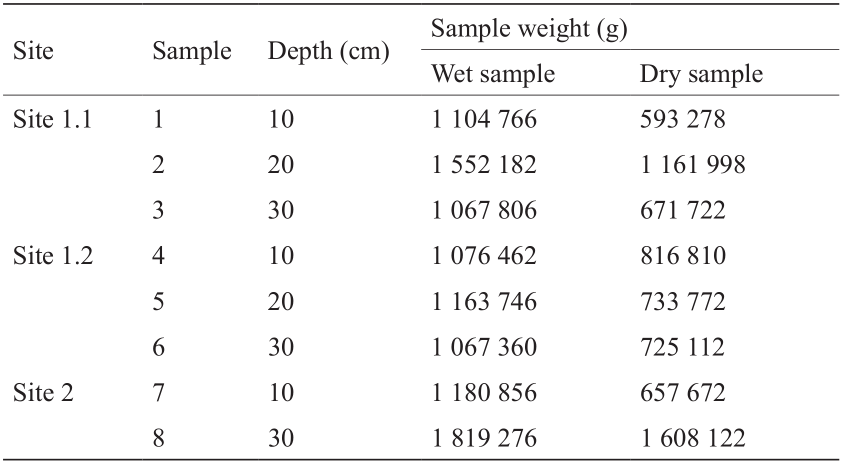
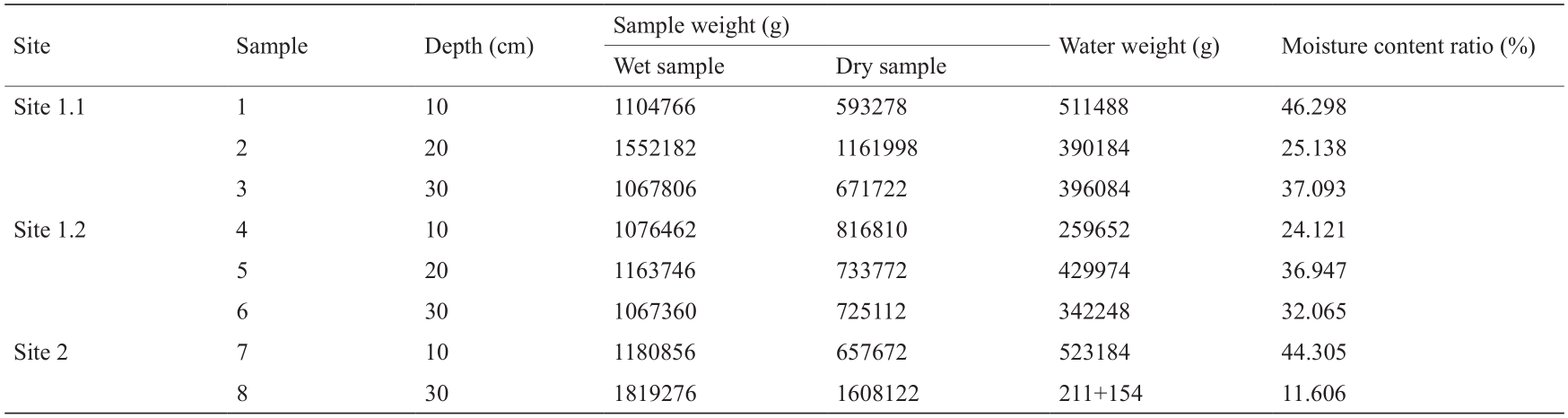
数据收集于2018年8月22日,地点是昭阳湖周围的 5个初始采样点,位于麟蹄郡南面附近。在这些地点中选择了两个采样点(东侧的1号点和西侧的2号点),并在这两个点确定了三个采样点:1号点的1.1号点和1.2 号点,以及2号点。从这些地点收集沉积物样本。在每个地点,土壤被挖到约40 cm的深度。在距昭阳河漫滩 10 cm(上部)、20 cm(中间)和30 cm(底部)深度取样(图2)。总共收集了8个样本,1号点的每个采样点分别收集了三个,2号点收集了两个。其他点(第3~5 号点)仍用作GPS程序的观测点。采样点用三个GPS手持装置和一架GPS无人机绘制。其中两个GPS单元已用参考点进行了校正,而另一个单元未进行校正。我们将使用三个GPS单元收集的采样坐标与使用GPS无人机收集的采样坐标进行比较,以提高准确度(表1)。样品数据为湿重,包括水分和去除水分后的干重(表2)。
《图2》

图2. 在三个采样点对昭阳湖漫滩沉积物进行采样。(a)采样点1.1;(b)采样点1.2;(c)采样点2。
《表1》
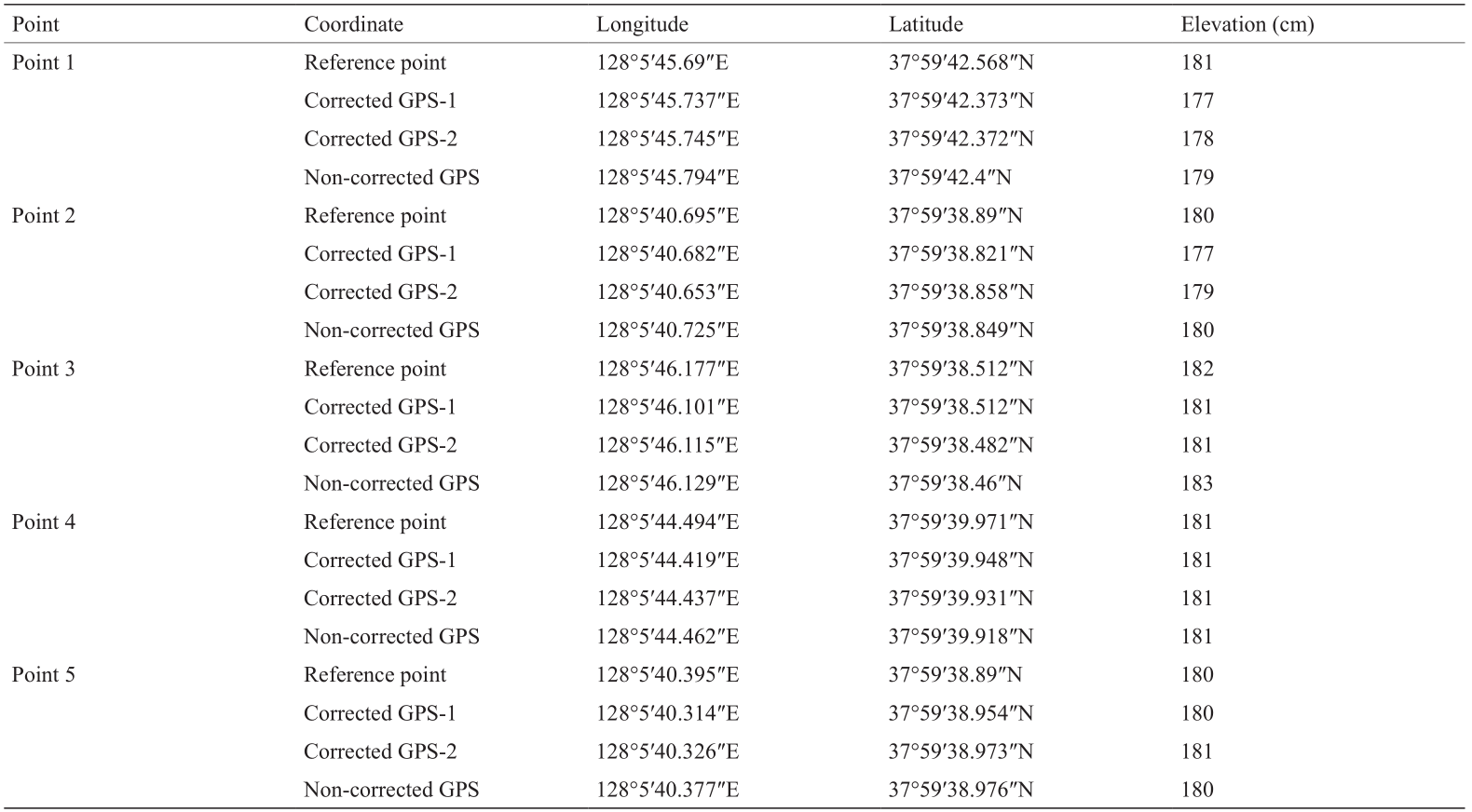
表1 昭阳湖漫滩的GPS点数据
《表2》
表2 昭阳湖漫滩沉积物的样品质量测量
《2.2. 颗粒细度指数》
2.2. 颗粒细度指数
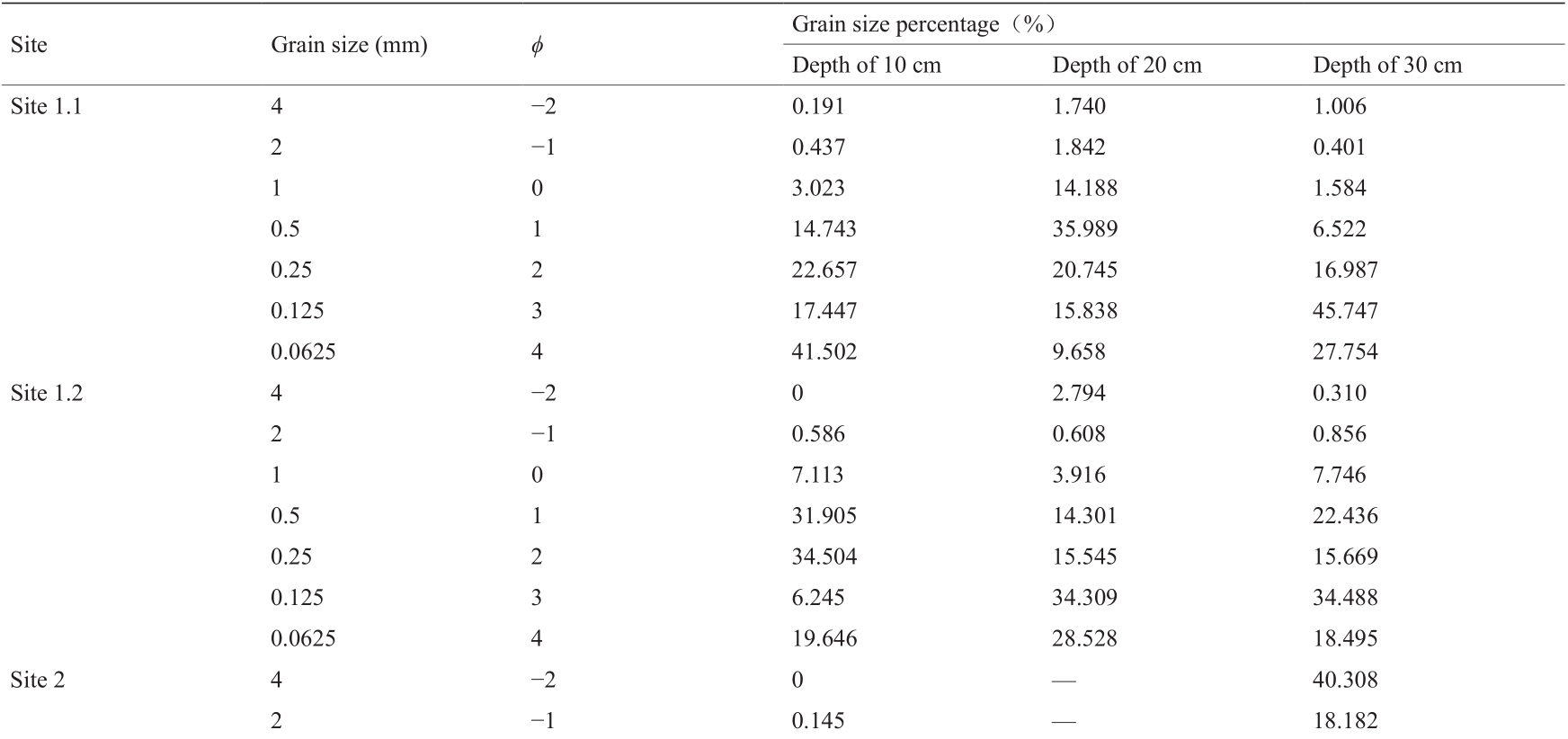
颗粒细度指数(grain fineness number,即粒度)被广泛用于沉积物研究中。由于沉积物颗粒的大小差异很大,因此需要一个标准的参考刻度来区分不同粒径的颗粒。例如,Udden [24]将参考值设置为1 mm。在这个尺度上,两倍于参考值的粒径大一个单位,而参考值一半的粒径则小一个单位。对于沙粒大小的颗粒来说, 1 mm的大小差异很重要,但对于砾石和较大的颗粒而言,则不那么重要,因为可以认为其在测量误差范围内。 Krumbein [25]指出,在对数尺度上表示毫米粒度更容易克服这个问题。因此,目前广泛使用的标准粒度参数由 Udden [24]首次指出并定义为phi (ϕ)。Wentworth [26]也开发了一个方案,作为标准分类量表。本研究中的沉积物粒度分级是根据Udden-Wentworth尺度划分的粒度,粒度用ϕ表示,单位为mm,并在每个断面给出了每种粒度的描述性名称[27]。
本研究采用标准筛组的筛分分析法对干砂样品的粒度进行了分析。ϕ尺度上的颗粒尺寸如式(1)所示:

式中,d表示颗粒直径,单位为mm;d0为参考直径,值为1 mm。
可使用过滤器或直接从薄片测量颗粒直径。利用数值,如累积频率曲线、分类、斜率、峰度、均值、众数和中值,描述沉积物粒度分布和形状,以分析沉积物颗粒尺寸。通过将粒度数据转换为ϕ标准,可以使用矩量法来进行统计分析。由于最大粒径和最小粒径的不确定性,使用基于ϕ标准的数据的图表比矩计算更常用。本研究应用Folk和Ward [28]提出的方法,如式(2)~(5),进行了粒度分析。例如,ϕ16、ϕ50和ϕ84表示累积质量百分比值(16%、50%和84%),用于计算晶粒尺寸。
在河漫滩东西两侧40 cm深度处收集沉积物,并在昭阳河漫滩10 cm(上部)、20 cm(中部)和30 cm(底部)的深度处对沉积物进行采样(表3)。数据的垂直分布是通过分析与收集砂量相关的粒度来计算的(图3)。使用分析筛将样品分类为4 mm、2 mm、1 mm、0.50 mm、0.25 mm、0.125 mm和0.0625 mm的尺寸等级。
《表3》
表3 从地点1.1、地点1.2和地点2采集的每个样品的粒度百分比

《图3》
图3. 沉积物样品的颗粒细度分析。(a)筛分分析过程;(b)过滤后的沉淀物样品。
《2.3. 含水量》
2.3. 含水量
准确和可重复的含水量测量对于减少分析物定量测定中可能的系统误差至关重要。因此,在不确定性较小的情况下测量含水量至关重要,尤其是对于样品测量而言。必须准确知道样品的含水量,才能确定样品的质量。
我们分析了每个样品的沉积物含水量。该方法的基础是通过烤箱干燥土壤样品直至质量变得恒定,从而去除土壤水分。由干燥前后的样品质量计算含水量(%)。称量均匀数量的湿沙样品。然后将样品干燥24 h,之后再次称量每个样品。比较干燥前后每个砂样的质量以确定质量比。我们以干燥前后的质量差作为参考来计算每个样品的含水量。图4说明了本研究中进行的含水量分析。
《图4》

图4. 用于分析含水量的沉积物样品。(a)湿样;(b)干样。
《3. 结果》
3. 结果
《3.1. GPS 和航摄像片分析》
3.1. GPS 和航摄像片分析
GPS系统已经成为经纬仪、磁带、测杆、电磁测距仪和台站等传统测量工具的宝贵补充和扩展。GPS程序基于从用作参考点的固定位置测量一系列目标的坐标、距离或角度。测量值和初始坐标之间的差值提供了有关目标或物体移动的信息。用于昭阳湖漫滩调查的观测点的空间分布如图1(b)所示,并汇总在表1中。
GPS数据可用于监测沉积物采样点的坐标。利用三个GPS设备对昭阳湖漫滩上的5个坐标观测点进行了测量。其中,两个装置进行了校正,一个未进行校正。沉积物取样是在第1点和第2点进行的,而第3点至第5点是作为比较来测量的,以确定三个GPS设备的精度。图 5放大显示了航摄像片(无人机图像)数据,以比较这三个GPS设备在这些参考点处的准确度。表4中显示了这三个GPS设备与每个参考点之间的距离差异。这三个 GPS设备的误差为3 m。因此,当来自三个GPS设备的数据的坐标测量结果的值小于3 m时,三个GPS设备将获得准确的数据。未修正和修正后的GPS数据之间没有显著差异;因此,可以得出结论,未修正的GPS设备与修正后的GPS设备一样表现良好。根据GPS坐标测量的结果,这三个GPS数据集在点4处显示的准确性很差,这可能是由于测量参考点时出现错误所致。
《表4》
表4 参考点的三个GPS设备比较
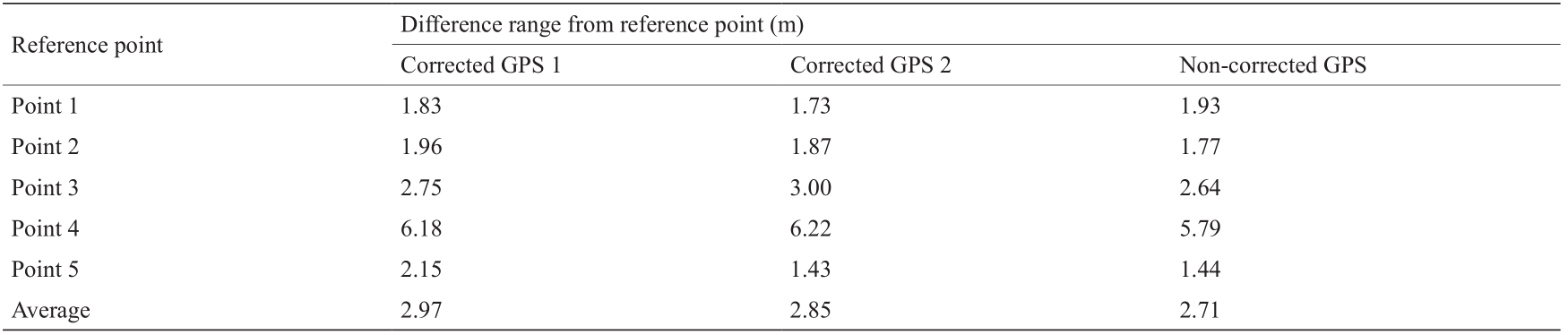
图5还显示了昭阳湖漫滩地区的DSM。DSM数据记录了昭阳湖漫滩的沉积情况,从而确定了沉积物的分布和高度。DSM数据是通过使用GPS数据校正的数字航摄像片数据获得的。根据DSM资料,昭阳湖漫滩东部的沉积物比西部高且厚。这种现象可能是由于沉积物流向东部地区而发生的,在那里形成的沉积物比西部地区更厚。DSM数据对于监测研究区域内沉积物的发展和分布非常有用。
《图5》

图5. 昭阳湖漫滩的DSM显示了使用三个GPS设备采集的点与参考点之间差异的比较。
《3.2. 粒度分析》
3.2. 粒度分析
通过对三个采样点的数据分析,确定了研究区的沉积环境,其中两个采样点位于漫滩东侧,一个采样点位于漫滩西侧。在东部采样点(点1.1和点1.2)的每个位置分别以10 cm、20 cm和30 cm的深度采集了三个样本,在西部采样点(点2)以10 cm和30 cm的深度采集了两个样本。对所有沉积物样品进行颗粒细度、类别、偏度和峰度分析。
表5显示了粒度分析的结果。选取三个地点,根据研究区域当地环境条件采集样品。通过选择可获得有效研究数据的位置来分析结果。根据Udden-Wentworth尺度来计算和分类每个取样位置的平均粒径。每个地点平均粒径在1.33 ~ 2.44 mm之间,表明昭阳湖漫滩沉积物主要由非常粗糙的砂粒组成。一般而言,低于0.35 ϕ(值为0.0)的值表示非常好的分类或排序,高于4ϕ(值为4.0)的值表示分类极差。因此,由于研究区域内的大多数地点都在1ϕ~2ϕ的范围内(值为0.95~1.27),因此可以认为样品的分类属于中等到较差的分类。研究地点显示了不同程度的偏斜。东侧采样点(点1.1和点1.2)的沉积物呈强负偏,而西侧采样点(点2)的沉积物呈强正偏。东侧的区域偏向于细粒度,而西侧的区域偏向于中等粒度。峰度一般为正,因此,分布一般为轻峰型。将昭阳湖漫滩东侧点1.1、点1.2和西侧点2进行了比较。东侧区域的小颗粒以0.125 mm的粒径为主,而西侧区域以 0.0625 mm的粒径为主,表明决口向东移动。
《表5》
表5 三个采样点的参数分析
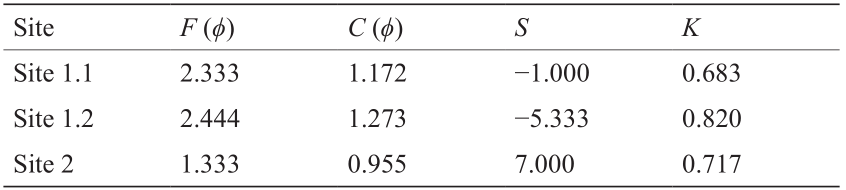
F: average fineness number; C: classification or sorting; S: skewness; K: Kurtosis.
《3.3. 含水量分析》
3.3. 含水量分析
对漫滩两岸的三个地点采集的样品进行分析,以评估垂直方向上的含水量。表6显示了深度剖面中的平均含水量比。平均含水量在10 cm处最高,说明10 cm处的沉积物孔隙度相对较差。此外,我们还比较了东西两侧的含水量。裂缝两侧的含水量越高,说明有水涌入,这意味着可能发生决口。因此,相对较高的含水量比表明东侧可能会发生决口。
《表6》
表6 分析每个样品深度剖面中的含水量比
《4. 讨论与结论》
4. 讨论与结论
本研究旨在通过调查昭阳湖漫滩沉积物,来分析昭阳水坝建成后昭阳河水的水质。为了更好地了解研究区域发生的决口,对颗粒平滑度、含水量、泥沙粒度和沉积速率进行了分析。共选取三个采样点,其中,东部两个、西部一个。在东部地区的每个站点以10 cm的间隔采集三个样本,总深度为30 cm。在西部地区的站点以 10 cm和30 cm的深度采集两个样本。昭阳湖沉积物样品的粒径最小为1.33 mm,最大为2.44 mm,代表具有负斜率的粗粒和极粗沉积物。粒度分析表明,决口向东移动。与含水量低的西部地区相比,含水量高的东部地区溃决的可能性较大。
利用GPS数据和数字航拍技术是监测昭阳湖漫滩泥沙淤积的实用方法。必须连续采集GPS坐标测量数据和 DSM数据,才能分析昭阳湖漫滩的泥沙分布、沉积速率和泥沙变化情况。
研究结果表明,对颗粒细度、含水量、泥沙沉积量和沉积速率的分析可用于了解和预测昭阳湖沉积物的运动方向。然而,由于很难根据单个研究的结果来确定趋势,因此需要进行持续的研究和数据收集,本研究所采用方法的理论多样性和准确性必须通过额外的研究加以验证。进一步的研究将改善对所获得的粒度、含水量、沉积速率、沉积方向以及GPS和DSM数据的比较,以用作昭阳湖漫滩的沉积监测标准。
《Acknowledgments》
Acknowledgments
This research was supported by a grant from the National Research Foundation of Korea provided by the government of Republic of Korea (2019R1A2C1085686).
《Compliance with ethics guidelines》
Compliance with ethics guidelines
Mutiara Syifa, Prima Riza Kadavi, Sung Jae Park, Chang-Wook Lee declare that they have no conflict of interest or financial conflicts to disclose.











 京公网安备 11010502051620号
京公网安备 11010502051620号




