
《1 工程研究前沿》
1 工程研究前沿
《1.1 Top10 工程研究前沿发展态势》
1.1 Top10 工程研究前沿发展态势
信息与电子工程领域组所研判的 Top 10 工程研究前沿汇总见表 1.1.1,涉及电子科学与技术、光学工程与技术、仪器科学与技术、信息与通信工程、计算机科学与技术、控制科学与技术等学科方向。其中,“雷达隐形技术”“新一代移动通信技术”“量子相干性测量与退相干管控”“软体机器人控制方法”“高分辨率遥感场景分类和图像处理技术”“基于深度神经网络的人体姿态识别方法”是基于科睿唯安高被引聚类得出;“可解释深度学习”“网络化协同感知和控制理论”“区块链技术”“硅基光互连芯片技术”这 4 项技术为专家补充。
各前沿所涉及的核心论文从 2012 年至 2017 年的逐年发表情况见表 1.1.2。其中,“高分辨率遥感场景分类和图像处理技术”是近年来核心论文发表数目增速最显著的前沿。
(1)雷达隐形技术
雷达隐形技术也称雷达隐身技术或雷达低可观测技术,其专业称谓为雷达目标特征信号控制技术。它是通过外形、材料、电路和对象综合设计等手段调控目标表面入射电磁波散射方向、极化方式、辐射强度和模式,从而降低被敌方雷达系统探测识别的一种技术。由于雷达是远距离探测目标的一种最为重要的方式,因此自出现之日起,雷达隐身就始终是隐身技术发展的重点。
根据技术实现中电磁波操控的维度,雷达隐身技术主要包括外形隐身、材料隐身、有源隐身和隐身综合设计与评估。外形隐身通过外形设计调控电磁波入射方向和散射模式以实现隐身效果,重点是将入射波反射至非威胁方向、降低或遮挡目标表面二面角 / 三面角等强散射源和不连续结构散射。材料隐身是通过在目标表面或其关键部位涂覆和贴装一些特殊的功能材料,以衰减电磁波或改变电磁波
《表 1.1.1》
表 1.1.1 信息与电子工程领域 Top10 工程研究前沿
| 序号 | 工程研究前沿 | 核心论文数 | 被引频次 | 篇均被引频次 | 平均出版年 | 常被引论文占比 | 被专利引用的文献占比 |
| 1 | 雷达隐形技术 | 24 | 788 | 32.83 | 2015.42 | 25.00% | 0 |
| 2 | 可解释深度学习 | 5 | 148 | 29.6 | 2015.4 | — | — |
| 3 | 新一代移动通信技术 | 9 | 386 | 42.89 | 2016 | 33.30% | 0 |
| 4 | 网络化协同感知和控制理论 | 139 | 5602 | 40.3 | 2013.45 | — | — |
| 5 | 区块链技术 | 16 | 213 | 13.31 | 2015.88 | — | — |
| 6 | 量子相干性测量与退相干管控 | 37 | 1015 | 27.43 | 2015.81 | 40.50% | 0 |
| 7 | 软体机器人控制方法 | 24 | 1498 | 62.42 | 2014.67 | 20.80% | 0 |
| 8 | 高分辨率遥感场景分类和图像处理技术 | 69 | 2327 | 33.72 | 2015.55 | 36.20% | 0 |
| 9 | 硅基光互连芯片技术 | 21 | 790 | 37.62 | 2013.52 | — | — |
| 10 | 基于深度神经网络的人体姿态识别方法 | 7 | 229 | 32.71 | 2016.29 | 28.60% | 0 |
《表 1.1.2》
表 1.1.2 信息与电子工程领域 Top10 工程研究前沿核心论文逐年发表数
| 序号 | 工程研究前沿 | 2012 年 | 2013 年 | 2014 年 | 2015 年 | 2016 年 | 2017 年 |
| 1 | 雷达隐形技术 | 0 | 1 | 3 | 6 | 13 | 1 |
| 2 | 可解释深度学习 | 0 | 1 | 1 | 0 | 1 | 2 |
| 3 | 新一代移动通信技术 | 0 | 0 | 1 | 2 | 2 | 4 |
| 4 | 网络化协同感知和控制理论 | 43 | 37 | 24 | 23 | 12 | 0 |
| 5 | 区块链技术 | 0 | 0 | 2 | 3 | 6 | 5 |
| 6 | 量子相干性测量与退相干管控 | 0 | 0 | 0 | 11 | 22 | 4 |
| 7 | 软体机器人控制方法 | 1 | 1 | 8 | 10 | 3 | 1 |
| 8 | 高分辨率遥感场景分类和图像处理技术 | 1 | 3 | 7 | 18 | 26 | 14 |
| 9 | 硅基光互连芯片技术 | 5 | 4 | 8 | 4 | 0 | 0 |
| 10 | 基于深度神经网络的人体姿态识别方法 | 0 | 0 | 0 | 2 | 1 | 4 |
辐射方式。有源隐身技术是指根据目标表面入射电磁波状态和目标状态实时生成与目标散射场相位相反的电磁场信号,从而通过空间对消实现零散射, 降低目标雷达散射截面。隐身综合设计与评估是雷达隐身技术工程应用中必须重视和重点发展的一个技术领域,这也是隐身原理基本公开但隐身技术仅为少数几个国家掌握的重要原因之一。
随着探测与反探测技术博弈持续升级对抗,未来雷达隐身技术发展主要方向有:①甚低可观测和超低可观测;②宽频带和全向隐身;③双 / 多站雷达隐身;④一体化综合和轻薄型隐身设计;⑤扰动场 / 衰减场缩减。
(2) 可解释深度学习
近年来,以卷积深度神经网络、循环神经网络、生成式对抗神经网络和深度强化学习等为代表的深度学习方法在图像分类与目标检测、语音识别与合成、自然语言处理等领域取得了令人瞩目的性能提升。尽管深度学习在各种人工智能应用中表现出优异性能,但其可解释性一直是深度学习提升应用的弱点,目前深度神经网络所获得高判别能力是通过构造多层非线性映射函数进行逐层抽象而取得,呈现黑盒效应,表现在其内部网络结构和学习参数与决策输出之间的关系很难建立。具备可解释性的人工智能将突破深度学习的主要瓶颈,如小样本或弱标注数据的有效学习、语义层次上的人机交互学习以及神经网络表示的语义调试等。
当前,通过理解神经网络表示或对复杂的神经网络表示进行解耦以提升其可解释性的研究主要包括 5 个方面:①在中间网络层对卷积神经网络表示进行可视化;②对卷积特征映射空间与不同语义类别对应关系进行诊断;③对不同卷积层的混合模式进行解耦;④建立可解释的深度网络模型,如可解释卷积深度神经网络和胶囊网络;⑤借助人机交互进行语义层学习。另一方面,对抗机器学习通过构建对抗样本探测基于深度学习模型的脆弱性。初步研究表明,通过可解释性规则添加扰动形成的对抗样本去学习元预测器,或构建影响函数追溯模型预测至其训练数据,有助于打开深度模型的黑盒, 并在一定程度上可对其预测行为或决策边界进行解释。
将基于规则的符号推理和数据驱动的学习过程结合 , 可增强智能学习过程的可解释性,如诱导学习将神经感知机与逻辑推理结合,使得学习过程可直接利用领域知识,从而增强了学习过程的可解释性。注意力与记忆在人的认知推理过程中扮演了重要角色,特别是对于文本、语音与视频等序列数据的知识获取、理解与推理过程至关重要。在注意力机制和记忆结构等支撑下构建深度神经推理机制, 以提升智能学习和推理的可解释性,是可解释性深度学习的重要研究方向。
(3) 新一代移动通信技术
为了应对未来移动数据流量爆炸性增长、海量设备同时接入以及各类业务不断涌现,新一代移动通信技术需要提供毫秒级的端到端需求、千亿级设备的连接能力和 Gbit/s 的峰值传输速率,支持超高移动性、超高流量密度和超高连接数密度等多样化应用场景。新一代移动通信技术将融合多种无线接入方式,实现灵活的网络部署和运营维护,全面提升频谱效率、能源效率和成本效率,促进移动通信产业的可持续发展。新一代通信技术意味着新一代移动芯片和相关核心技术的设计、研发和生产,进而涉及整个信息产业的发展,直接涉及产业转型、产业升级,对制造业、服务业均有直接的重大影响。同时,因为通信技术涉及全球性标准、广泛的专利权、巨大的网络建设成本,对任何一个国家而言, 移动通信新技术的发展都具有巨大经济利益和社会效益。
(4) 网络化协同感知和控制理论
网络化协同感知与控制系统(NCSCS)通常由一系列传感器和控制器组成,传感器用于从周围环境中收集信息,而控制器则可用于改变环境,传感器和控制器通过通信网络连接。NCSCS 不仅具备感知功能,还能改变周边环境和物理世界,所以NCSCS 在灾害救助、智能建筑、工厂自动化、井下安全控制和生化攻击检测等领域有着广泛的应用前景。
与传统集中式感知与控制方法相比,网络化分布式协同感知与控制具有以下优势:①将感知与控制功能分散,提高了系统对感知和控制节点失效的健壮性;②在大规模分布式系统中,通常很难做到全网时钟同步,各个节点往往处于异步工作状态, 集中式感知与控制方法无法处理异步信息,而基于网络的分布式构架可以采用递阶分层处理方法解决异步感知与控制问题;③将感知与控制功能分散后可极大提高系统计算效率,通过子系统间的信息交互,可以在降低计算量的同时获得与集中式感知和控制近似的性能。
最近几年,这种基于信息交互的分布式感知和控制理论与方法研究获得极大关注,但很多理论和应用问题尚待解决,包括基于节点间(如控制器、传感器)合作模式、非合作模式的分布式感知与控制,难以全网时钟同步情况下各子系统处于异步工作状态的异步多频分布式感知与控制,分布式协同感知与控制的可扩展性(接受任意节点的任意接入与退出),网络拓扑结构与脆弱性对分布式感知与控制的影响。相信未来会取得突破性进展,有力推动工业互联网下的智能制造、网联无人自主系统、智能电网等领域的发展。
(5) 区块链技术
区块链采用 P2P 技术、密码学和共识算法等技术,提供一种在不可信环境中进行信息与价值传递交换的机制,是构建未来价值互联网的基石,其具有数据不可篡改、系统集体维护、信息公开透明等特性。区块链技术作为一种通用技术,从数字货币加速渗透至其他领域,与各行各业创新融合。与传统技术相比,区块链技术具有以下 3 方面优势:①共识算法确保区块链上数据难以篡改,更加安全;②由于每个节点都存有一份数据,区块链具有异构多活、可靠性强的特征;③具有智能合约属性,能自动执行去中心化应用。
随着区块链应用从单一应用到多元方向发展, 区块链技术也还远未定型,在未来一段时间还将持续演进,共识算法、服务分片、处理方式、组织形式等技术环节上都有提升效率的空间,在以下几方面存在一定挑战:①性能和扩展性不能满足要求, 主要表现为交易吞吐量及存储带宽远不能满足应用实际需求。目前比特币的交易吞吐率为每秒 7 笔,以太坊是每秒 14 笔,如何在不影响系统整体安全性的情况下,提高交易吞吐率将是值得研究的问题, 目前通过压缩区块时间、提高区块大小、采用分片的技术都可以有效提高交易吞吐率;②数据隐私和访问控制有待改进。在现有公有链中,各参与方都能获得完整数据备份,所有数据对于参与方来讲是透明的,无法使参与方仅获取特定信息。如何在不影响公有链执行效率的情况下,隐私数据保护是一个挑战性问题。目前这方面研究包括混币机制、零知识证明机制、环签名机制等保护用户的交易隐私数据;③治理机制有待完善。公有链社区摸索出了“硬分叉”和“软分叉”等升级机制,但遗留问题有待观察。由于公有链不能“关停”,其错误修复也异常棘手,一旦出现问题,尤其是安全漏洞,将非常致命。
(6) 量子相干性测量与退相干管控
量子相干性和量子相变在量子信息中占有重要地位。虽然理论上在演化过程中系统一直具有相干性,但由于实际系统并不是严格封闭的,必然会与环境发生纠缠,从而导致退相干。在量子力学里, 开放量子系统的量子相干性会因为与外在环境发生量子纠缠而随着时间逐渐丧失,该效应被称为“量子退相干”,又称为“量子去相干”。量子退相干是量子系统与环境因量子纠缠而产生的后果。由于量子相干性而产生的干涉现象会因为量子退相干而消失无踪。量子退相干促使系统的量子行为变迁成为经典行为,该过程被称为“量子至经典变迁”。德国物理学者汉斯·泽贺最先于 1970 年提出量子退相干概念。自 1980 年以来,量子退相干已成为热门研究论题。
量子退相干通常发生很快,因此很难制成处于宏观或介观的叠加态物体。为实验验证量子退相干效应、见证量子与经典之间的平滑边界、检验与改良描述量子退相干的理论模型、找出任何不同于量子力学幺正演化行为之处,必须完成以下几件极具挑战性的任务:①制备出可分辨的几个宏观态或介观态的量子叠加态;②设计一套证实量子叠加的方法;③ 量子退相干时间必须足够长久,才能正确观测量子退相干;④设计一套监督量子退相干的方法。
退相干现象对量子信息科学的影响可大致分成两块内容:量子计算与量子通信。我们知道在量子信息科学中,量子系统的状态蕴藏着信息。量子退相干会使我们所在意的系统的部分或全部信息丧失,因此在量子计算上会造成计算结果出现误差干扰;而在量子通信上,一个环境充满扰动的信息传递通道,在通道末端的收受者有收到噪声及错误信息的可能,需要除错系统如编码方法的协助。
(7) 软体机器人控制方法
软体机器人控制方法,本质上是解决软体机器人的逆动力学问题。与传统由电机驱动的硬体机器人不同,软体机器人采用类似动物肌肉的软材料驱动,使得机器人具有类似动物的敏捷、灵活的运动能力,增强了对于复杂作业环境的适应性,同时减少了机器人与人交互的危险性。理论上,软体机器人具有无限自由度,能够产生极其复杂的运动,如拉伸、弯曲和扭转等,这使得软体机器人整体运动控制面临巨大挑战。目前,面向机器人驱动的“人工肌肉”材料主要分为:气动人工肌肉、形状记忆合金、电活性聚合物等。尽管这些材料都具有能量密度高、形变大、重量轻等优势,软材料驱动器往往具有强非线性、高黏弹性等特点,同时考虑到软材料的环境屈服性,软机器人的作业环境具有极高的不确定性,因此,针对软体机器人的控制方法应具有很好的自适应性和鲁棒特性。总体来说,软体机器人控制方法可从两方面考虑:①基于模型的控制方法;②基于学习的控制方法。前者通过物理机理或者数据驱动得到系统的运动学模型,并采用传统反馈控制器实现运动控制。这类方法的不足是对于模型具有一定依赖性,而软体机器人在与环境交互中,软驱动器的运动 / 动力学模型存在很强的不确定性。为了克服对模型的依赖,以及考虑到软体驱动器与生物肌肉的相似性,后者借鉴生物肌肉的控制方法,通过构建人工神经元网络在线学习实时补偿模型的不确定性。这类方法在神经网络的结构优化和参数调节上仍需大量探索。
(8) 高分辨率遥感场景分类和图像处理技术
高分辨率遥感影像作为关系着国计民生的应急和减灾应用的空间大数据。遥感场景分类隶属于整体图像理解的研究范畴,场景分类要对图像场景进行分析、判断、解译和标注。场景分类是学习和发现图像与场景语义内容标签的一个映射过程。场景通常包含多个目标,场景分类也是图像理解的关键课题。常见场景分类算法有局部语义的场景分类、中层语义的场景分类、语义主题模型的场景分类等。根据场景分类的层次又可分为低层特征描述和中层特征描述两大主流方法。由于低层特征描述往往泛化性能差,难以用于处理训练集以外的图像分类, 目前场景分类算法大部分集中在基于中层语义建模的场景分类。
中层特征是对低层特征的一种聚集和整合,其本质是利用统计分布建立特征与类别的联系。全局的低层特征往往无法反映局部对象,考虑局部低层特征描述、多局部特征融合及集成学习可提高场景分类的识别率。视觉词袋(BoVW)模型的场景分类,是目前广泛采用的中层语义算法。BoVW 模型无需分析场景具体目标组成 , 根据场景低层特征统计特性建立视觉单词 , 然后利用图像的视觉单词分布表达图像场景信息。考虑视词的空间共生关系和上下文关系,将有助于提升场景结构语义的解释。但目前 BoVW 模型的视词数量设置多少为宜尚无定论,且生成对象往往与训练样本有较大相关度,而这是影响算法鲁棒性的重要因素。
统计学习理论是比较成熟的研究算法,在多传感器融合遥感影像场景分类中,基于结构风险最小化原则的支持向量机和利用 Bootstrap 重抽样的随机森林有相关报道。为实现机载雷达和多光谱图像的场景分类 , 随机森林往往结合经典的先验模型无监督图像分割工具 MRF 进行分类。近期源于文本分类研究的 pLSA、LDA 等语义主题模型,在星载滑坡和机载航空摄影的场景分类中得到较好实验效果。
中层语义场景分类在一定程度上缓解了语义鸿沟的问题 , 但对场景尺度变化、传感器拍摄角度和时间的差异、语义对象组合变化往往缺乏有效措施。
(9) 硅基光互连芯片技术
硅基光互连芯片技术,是以硅和硅基衬底材料作为光学介质,通过集成电路工艺制造相应的光子器件和光电器件(包括硅基光收发器件、硅基光调制器、硅基光波导器件等),并利用这些器件对光子进行处理、操纵,以实现系统间、主板间、芯片间、CPU 间及 CPU 内部核之间的光互连。硅不仅是一种电子材料,也是一种光子材料。采用硅作为衬底,可以利用已有集成电路工艺制作光子器件。片间与片内光互连,相比于电互联技术,具有超高带宽、高速、低功耗、低失真、低串扰、无电磁干扰等根本性优势。硅基光互联芯片技术主要研究方向有以下几个方面:①光发射器,用于发射光波作为信息载体;②光波导,用于传导光波;③调制器, 用于将计算单元产生的电信号加载于光波载体;④ 光信号接收器,用于接收光信号,并转换成电信号,反馈给计算单元;⑤系统集成。
尽管硅作为光互联材料,展现出许多独特优势, 然而,作为单一材料,硅不可能完成光互联器件的所有功能。例如,光传输和光接受本身就是一个矛盾的存在。光传输要求材料必须对光子透明,而光接受则要求材料对光不透明,能够吸收光子。硅材料是一种间接带隙半导体,很难实现受激辐射,因而也难以做成光源材料。因此,硅在光互联应用中存在一些技术瓶颈。例如,2015 年与 2018 年由Nature 报道的美国伯克利大学等机构合作研发的硅光子处理器,其一直采用外部光源。因此其发展趋势就是寻找其他能够与硅基 CMOS 工艺兼容的材料,以弥补硅材料在光互连芯片技术方面的不足。
(10) 基于深度神经网络的人体姿态识别方法
基于智能手机和可穿戴设备,如手环、手表的传感器的人体动作识别已成为主流方法,传统的机器学习方法,如支持向量机、贝叶斯网络、时域频域分析等机器学习方法,需要专业的人体动作领域知识来提取特征。基于神经网络的方法依然很少, 神经网络和深度学习依然需要人为提取特征。特征提取是机器学习和深度学习中的关键步骤。同样, 对于人体动作识别,传感器数据的特征提取也极为重要。
人体动作识别是重要的研究课题,特别是在智能手机和智能可穿戴设备普及的今天。针对人体动作识别,机器学习方法主要有传统支持向量机、决策树、K 近临、朴素贝叶斯、神经网络以及深度学习。模型依赖的训练数据源主要有单个加速传感器, 或者结合陀螺仪、磁场甚至还有声音信息。动作识别中传感器的位置主要分为固定位置(多个传感器一般是固定位置)和非固定位置。特征提取主要为时域提取,有些结合了频域特征提取。
《1.2 Top3 工程研究前沿重点解读》
1.2 Top3 工程研究前沿重点解读
1.2.1 雷达隐形技术
雷达隐形技术也称雷达隐身技术或雷达低可观测技术,其专业称谓为雷达目标特征信号控制技术。它是通过外形、材料、电路和对象综合设计等手段调控目标表面入射电磁波散射方向、极化方式、辐射强度和模式,从而降低被敌方雷达系统探测识别的一种技术。由于雷达是远距离探测目标的一种最为重要的方式,因此自出现之日起,雷达隐身就始终是隐身技术发展的重点。
根据技术实现中电磁波操控的维度,雷达隐身技术主要包括外形隐身、材料隐身、有源隐身和隐身综合设计与评估。
外形隐身是最早受到关注和发展的雷达隐身技术,它通过外形设计调控电磁波入射方向和散射模式以实现隐身效果,重点是将入射波反射至非威胁方向、降低或遮挡目标表面二面角 / 三面角等强散射源和不连续结构散射。以隐身飞行器为例,外形隐身设计需解决的关键技术有隐身外形与气动布局综合设计、电大尺寸目标实时电磁计算技术、一体化快速成形等技术。
材料隐身是通过在目标表面或其关键部位(如电子系统天线和一些强散射点处)涂覆和贴装一些特殊的功能材料,以衰减电磁波或改变电磁波辐射方式的一种技术。根据材料电磁调控方式,目前研究和发展的隐身材料主要有:吸波型隐身材料,主要是将雷达波引入材料内部并将其能量耗散掉;以超材料为代表的表面型隐身材料,主要通过亚波长的周期性几何电路结构设计来改变电磁波散射方向图和极化方式。材料隐身技术发展中需解决的关键技术包括电磁 / 热 / 力综合设计分析、微纳加工与超材料技术。以超材料为代表的表面电磁操控材料是未来隐身材料发展的重点。
有源隐身技术是指根据目标表面入射电磁波状态(入射方向、极化)和目标状态(姿态速度等) 实时生成与目标散射场相位相反的电磁场信号,从而通过空间对消实现零散射,降低目标雷达散射截面。有源隐身技术目前还处于探索和发展阶段,需要解决的关键技术包括实时电磁频谱感知与测量、电磁场信号实时生成与精确控制、信息超材料等。以有源隐身为目的智能蒙皮是未来隐身技术发展的一个重要方向。
隐身综合设计与评估是雷达隐身技术工程应用中必须重视和重点发展的一个技术领域,这也是隐身原理基本公开但隐身技术仅为少数几个国家掌握的重要原因之一。由于未来多传感器战场感知技术发展,隐身技术也必须强调电磁、光学、红外、声等有源、无源特征信号的一体化控制技术,因此必须解决和发展的关键技术包括多场耦合并行计算、隐身性能仿真测试与评估以及相关设计工具和仪器技术。
当前,雷达隐身技术经过 50 多年发展,已成功应用于多型武器装备。以隐身飞行器为例,从最早代表性的 F117,到现在的 F22、F35 和 B2 等, 中国和俄罗斯也进入掌握隐身战斗机设计技术为数不多的国家行列。随着探测与反探测技术博弈的持续升级对抗,未来雷达隐身技术发展的主要方向有:①向甚低可观测和超低可观测方向发展;②向宽频带和全向隐身方向发展;③从单站雷达隐身向双 / 多站雷达隐身方向发展;④隐身设计向一体化综合和轻薄型发展;⑤从散射场减缩到扰动场 / 衰减场缩减方向发展。
目前,雷达隐形技术工程研究前沿中核心论文排名前三的国家为中国、美国、澳大利亚(见表1.2.1)。
根据核心论文的主要产出机构(见表 1.2.2)来看, 排名前三的机构为 Southeast Univ、Cooperat Innovat Ctr Terahertz Sci、Nankai Univ、Tianjin Univ、Xidian Univ。从雷达隐形技术工程研究前沿主要国家或地区间的合作网络(见图 1.2.1)可看出,中国与澳大利亚、美国间存在合作关系,西班牙与荷兰间存在合作关系。从雷达隐形技术工程研究前沿主要机构间的合作网络(见图 1.2.2)可看出,大部分机构间合作关系较为密切。从施引核心论文的主要产出国家和地区统计结果(见表 1.2.3)来看,中国、美国和新加坡名列前三。其中,中国以 255 篇的论文数高居榜首,所占比例达到 71.63%。从施引核心论文的主要产出机构(见表 1.2.4)来看,排名前三的机构为 Southeast Univ、Air Force Eng Univ、Xidian Univ。
《表 1.2.1》
表 1.2.1 “雷达隐形技术”工程研究前沿中核心论文的主要产出国家或地区
| 序号 | 国家 / 地区 | 核心论文数 | 论文比例 | 被引频次 | 被引频次比例 | 篇均被引频次 | |
| 1 | China | 19 | 79.17% | 606 | 76.90% | 31.89 | |
| 2 | USA | 4 | 16.67% | 146 | 18.53% | 36.5 | |
| 3 | Australia | 2 | 8.33% | 52 | 6.60% | 26 | |
| 4 | The Netherlands | 1 | 4.17% | 66 | 8.38% | 66 | |
| 5 | Spain | 1 | 4.17% | 66 | 8.38% | 66 | |
| 6 | Iran | 1 | 4.17% | 12 | 1.52% | 12 | |
《表 1.2.2》
表 1.2.2 “雷达隐形技术”工程研究前沿中核心论文的主要产出机构
| 序号 | 机构 | 核心论文数 | 论文比例 | 被引频次 | 被引频次比例 | 篇均被引频次 | |
| 1 | Southeast Univ | 11 | 45.83% | 469 | 59.52% | 42.64 | |
| 2 | Cooperat Innovat Ctr Terahertz Sci | 5 | 20.83% | 165 | 20.94% | 33 | |
| 3 | Nankai Univ | 4 | 16.67% | 173 | 21.95% | 43.25 | |
| 4 | Tianjin Univ | 4 | 16.67% | 171 | 21.70% | 42.75 | |
| 5 | Xidian Univ | 4 | 16.67% | 76 | 9.64% | 19 | |
| 6 | Nanjing Univ | 3 | 12.50% | 144 | 18.27% | 48 | |
| 7 | Arizona State Univ | 2 | 8.33% | 48 | 6.09% | 24 | |
| 8 | Fudan Univ | 2 | 8.33% | 113 | 14.34% | 56.5 | |
| 9 | Univ Elect Sci & Technol China | 2 | 8.33% | 129 | 16.37% | 64.5 | |
| 10 | Peking Univ | 2 | 8.33% | 42 | 5.33% | 21 | |
《图 1.2.1》
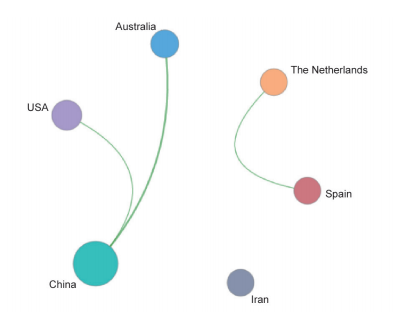
图 1.2.1 “雷达隐形技术”工程研究前沿主要国家或地区间的合作网络
1.2.2 可解释深度学习
(1)人工智能核心:学习和推理
人工智能特点在于具有永无止境(自我)从数据和经验中学习、直觉推理与自适应等特点。推理是进行思维模拟的基本形式之一,是从一个或几个已知的判断(前提)推出新判断(结论)的过程。一般可将推理分为演绎推理、归纳推理、类比推理、假设性推理、因果推理和综合推理等。早期推理研究在逻辑学派和知识工程学派中展开。逻辑学派主张用形式化方法来描述客观世界,其认为任何推理是基于已有逻辑化知识而展开,如一阶逻辑和谓词
《图 1.2.2》

图 1.2.2 “雷达隐形技术”工程研究前沿主要机构间的合作网络
《表 1.2.3》
表 1.2.3 “雷达隐形技术”工程研究前沿中施引核心论文的主要产出国家或地区
| 序号 | 国家 / 地区 | 施引核心论文数 | 施引核心论文比例 | 平均施引年 |
| 1 | China | 255 | 71.63% | 2016.5 |
| 2 | USA | 36 | 10.11% | 2016.4 |
| 3 | Singapore | 19 | 5.34% | 2016.6 |
| 4 | India | 9 | 2.53% | 2016.6 |
| 5 | Iran | 9 | 2.53% | 2016.3 |
| 6 | Canada | 7 | 1.97% | 2016.1 |
| 7 | UK | 6 | 1.69% | 2016.3 |
| 8 | Australia | 6 | 1.69% | 2016.5 |
| 9 | Italy | 5 | 1.40% | 2016.6 |
| 10 | Denmark | 4 | 1.12% | 2017 |
《表 1.2.4》
表 1.2.4 “雷达隐形技术”工程研究前沿中施引核心论文的主要产出机构
| 序号 | 机构 | 施引核心论文数 | 施引核心论文比例 | 平均施引年 |
| 1 | Southeast Univ | 53 | 24.65% | 2016.3 |
| 2 | Air Force Eng Univ | 51 | 23.72% | 2016.5 |
| 3 | Xidian Univ | 19 | 8.84% | 2016.8 |
| 4 | Cooperat Innovat Ctr Terahertz Sci | 16 | 7.44% | 2016.2 |
| 5 | Tianjin Univ | 16 | 7.44% | 2016.1 |
| 6 | Nanjing Univ | 15 | 6.98% | 2016.2 |
| 7 | Chinese Acad Sci | 12 | 5.58% | 2016.5 |
| 8 | Nankai Univ | 12 | 5.58% | 2015.8 |
| 9 | Nat Univ Singapore | 11 | 5.12% | 2016.5 |
| 10 | Commun Univ China | 10 | 4.65% | 2016.4 |
逻辑及定义在其上的推理演算。而随之发展起来的基于知识图谱推理、记忆驱动的推理、多智能体推理、因果推理和跨媒体综合推理等构成了人工智能推理的主要研究内容和未来值得重视的研究方向。智能学习的 3 种主要模式是:①基于形式化方法,即通过符号逻辑表示下的推理,可视为用规则指导模型去学习和推理;②统计方法,即挖掘数据所蕴含的内在模式进行学习,可视为数据驱动的学习模式,其可在大规模有标记样本上进行有监督的学习(如目前广泛应用的深度学习方法),也可在小样本上进行贝叶斯概率学习,即在解析数据所蕴含的内在模式的基础上,结合组合性和因果性等先验知识进行无监督或半监督学习;③控制论方法, 即从经验中自我提升,可视为用问题引导或基于反馈牵引进行学习,如强化学习方法。智能学习和推理是人工智能研究的核心内容。
(2)深度学习:黑盒特性与可解释性
近年来,以卷积深度神经网络、循环神经网络、生成式对抗神经网络和深度强化学习等为代表的深度学习方法引起了学术界关注并在产业界成功应用,其在图像分类与目标检测、语音识别与合成、自然语言处理等诸多应用领域均取得了令人瞩目的性能提升,深度的智能学习和推理成为当前人工智能研究的前沿。
尽管深度学习在各种人工智能应用中表现出优异性能,但是其可解释性一直是深度学习提升应用的弱点,目前深度神经网络所获得高判别能力是通过构造多层非线性映射函数进行逐层抽象而取得, 呈现黑盒效应。即这一以数据驱动机器学习为核心的人工智能应用系统虽可感知、学习、行动和决策, 系统有效性受限于其无法向用户解释其决策过程的合理性、描述其模型的优势和弱点、预测其在新任务上的适用性甚至确保其在未来应用中的安全性。具备可解释性的人工智能将突破深度学习的主要瓶颈,如小样本或弱标注数据的有效学习、语义层次上的人机交互学习以及神经网络表示的语义调试等。
(3)可解释人工智能:数据驱动 + 知识引导
深度神经网络的黑盒特性表现在其内部网络结构和学习参数与决策输出之间的关系很难建立。当前,通过理解神经网络表示或对复杂的神经网络表示进行解耦以提升其可解释性的研究主要包括 5 个方面:①在中间网络层对卷积神经网络表示进行可视化;②对卷积特征映射空间与不同语义类别对应关系进行诊断;③对不同卷积层的混合模式进行解耦;④建立可解释的深度网络模型,如可解释卷积深度神经网络和胶囊网络;⑤借助人机交互进行语义层学习。另一方面,对抗机器学习通过构建对抗样本探测基于深度学习模型的脆弱性。初步研究表明,通过可解释性规则添加扰动形成的对抗样本去学习元预测器,或构建影响函数追溯模型预测至其训练数据,有助于打开深度模型的黑盒,并在一定程度上可对其预测行为或决策边界进行解释。
深度学习是数据驱动的学习模式,由于缺少显示的规则和推理过程,使得以深度学习为核心的人工智能系统的可解释性难以建立。相关研究表明, 将基于规则的符号推理和数据驱动的学习过程结合 , 可增强智能学习过程(如分类和预测)的可解释性,如诱导学习将神经感知机与逻辑推理(如一阶逻辑推理)结合使得学习过程可直接利用领域知识,从而增强了学习过程的可解释性。受大脑智能启发,人脑在进行感知和认知时,不仅要处理当前数据,还需要调动大脑中存储的相关信息。因此,注意力与记忆在人的认知推理过程中扮演了重要角色,特别是对于文本、语音与视频等序列数据的知识获取、理解与推理过程至关重要。因此在端到端深度学习中引入注意力机制和记忆结构,可有效利用当前数据以外的数据和知识,克服了仅依赖于输入数据进行驱动学习的不足。这方面的代表性工作有神经图灵机、记忆网络、自适应计算时间、Neural GPU、Neural Random Access Machines 以及通过强化学习来训练神经图灵机和堆栈、队列等形式的外在记忆体随机访问方法,形成了新的“数据驱动 + 知识引导”的智能学习框架。因此,在注意力机制和记忆结构等支撑下构建深度神经推理机制,以提升智能学习和推理的可解释性,是可解释性深度学习的重要研究方向。
(4)文献情况
可解释机器学习的研究正在引起学术界的关注。在 2017 年国际机器学习大会上由哈佛大学和 Google Brain 的学者组织了关于“Interpretable Machine Learning: The fuss, the concrete and the questions”的教程和论坛。同时,在 2017 年神经信息和处理系统大会上,来自麻省理工、德国MPI、微软研究院、康奈尔大学、约翰霍普金斯大学、威斯康辛大学麦迪逊分校、纽约大学、加州大学圣迭戈分校、DeepMind 等研究机构的 11 位学者联合组织了“Interpretable ML”的专题研讨会,并录用了来自全球研究机构的共 35 篇论文,从深度学习、核方法和概率模型、自动科学发现、人工智能安全和伦理、因果推理、人机交互、定量和可视化以及符号回归等多个领域对可解释机器学习的相关研究进行探讨。
美国国防预先研究计划局(DARPA)2017 年10 月开展“可解释人工智能”计划(XAI),以此探索可以使自主系统对其行为进行更好地解析的技术。DARPA 已经确定,在自主系统向分析师提供有关可疑活动的信息或需要进一步检查的情况下, 分析人员有必要让自主系统解释为什么要执行例如将特定照片、数据或特定的人带给分析人员这样的行为。按照 DARPA 的设想,XAI 的目标是“产生更多可解释的模型,同时保持高水平的学习表现(预测准确性);使人类用户理解、信任和有效管理新一代人工智能合作伙伴”。
2018 年 7 月,美国国防高级研究计划局推出人工智能探索(AIE)计划。AIE 延续了 DARPA 在人工智能领域开创性研发的 50 年路线图。过去的DARPA 投资促进了“第一波”(基于规则)和“第二波”(基于统计学习)AI 技术发展。DARPA 表示, AIE 计划将专注于“第三波”人工智能的应用及理论,旨在让机器适应不断变化的情况,具有解释自身决策原因能力的人工智能系统。
目前,可解释深度学习工程研究前沿中核心论文主要产出国家见表 1.2.5。核心论文的主要产出机构见表 1.2.6。从可解释深度学习工程研究前沿主要国家或地区间的合作网络(见图 1.2.3)可看出,
美国与法国、英国、哥伦比亚间存在合作关系,中国和丹麦间存在合作关系。从可解释深度学习工程研究前沿主要机构间的合作网络(见图 1.2.4)可看出,各机构间存在一定的合作关系。从施引核心论文的主要产出国家和地区统计结果(见表 1.2.7) 来看,中国、美国和英国名列前三。其中,中国以53 篇的论文数高居榜首,所占比例达到 26.77%。从施引核心论文的主要产出机构(见表 1.2.8)来看,排名前三的机构为 Univ Nacl Colombia、Case Western Reserve Univ、Chinese Acad Sci。
1.2.3 新一代移动通信技术
从研究范式而言,新一代移动通信技术仍将沿着既往 3 个主要范式深入推进,即测量建模、性能分析和系统设计。测量建模指对客观物理世界的测量、刻画和建模;性能分析指给定无线通信系统和传输机制,分析其系统性能;系统设计指给定系统设计指标,对移动通信网络架构进行设计并展开优化分析。另一方面,随着大数据、机器学习、人工智能技术的进步,如何将其与移动通信结合,实现跨学科融合发展,是未来新一代移动通信技术重点研究方向之一,在未来 5 年内甚至可能成为主流研究和重要分支。拟解决的关键技术有:①存储、计算与通信的协同融合技术;②支持海量终端接入的泛在网络架构及超密集异构网络技术;③超可靠低时延移动通信系统的理论与实现;④面向场景和服
《表 1.2.5》
表 1.2.5 “可解释深度学习”工程研究前沿中核心论文的主要产出国家或地区
| 序号 | 国家 / 地区 | 核心论文数 | 论文比例 | 被引频次 | 被引频次比例 | 篇均被引频次 |
| 1 | USA | 2 | 40.00% | 107 | 72.30% | 53.5 |
| 2 | Colombia | 1 | 20.00% | 60 | 40.54% | 60 |
| 3 | UK | 1 | 20.00% | 47 | 31.76% | 47 |
| 4 | France | 1 | 20.00% | 47 | 31.76% | 47 |
| 5 | Austria | 1 | 20.00% | 17 | 11.49% | 17 |
| 6 | China | 1 | 20.00% | 13 | 8.78% | 13 |
| 7 | Denmark | 1 | 20.00% | 13 | 8.78% | 13 |
| 8 | Germany | 1 | 20.00% | 11 | 7.43% | 11 |
《表 1.2.6》
表 1.2.6 “可解释深度学习”工程研究前沿中核心论文的主要产出机构
| 序号 | 机构 | 核心论文数 | 论文比例 | 被引频次 | 被引频次比例 | 篇均被引频次 |
| 1 | Case Western Reserve Univ | 1 | 20.00% | 60 | 40.54% | 60 |
| 2 | Univ Nacl Colombia | 1 | 20.00% | 60 | 40.54% | 60 |
| 3 | Cent Supelec INRIA Saclay | 1 | 20.00% | 47 | 31.76% | 47 |
| 4 | Univ Massachusetts | 1 | 20.00% | 47 | 31.76% | 47 |
| 5 | Univ Oxford | 1 | 20.00% | 47 | 31.76% | 47 |
| 6 | IST Austria | 1 | 20.00% | 17 | 11.49% | 17 |
| 7 | Shanghai Jiao Tong Univ | 1 | 20.00% | 13 | 8.78% | 13 |
| 8 | Univ Copenhagen | 1 | 20.00% | 13 | 8.78% | 13 |
| 9 | Staatliche Berufliche Oberschule Kaufbeuren | 1 | 20.00% | 11 | 7.43% | 11 |
| 10 | Univ Appl Sci Mittweida | 1 | 20.00% | 11 | 7.43% | 11 |
《图 1.2.3》

图 1.2.3 “可解释深度学习”工程研究前沿主要国家或地区间的合作网络
务的智能移动通信系统设计;⑤数据驱动的移动通信系统的理论与实现;⑥超大规模移动通信网络的优化理论与实时实现。
目前世界上主要国家、地区的发展重点是:①美国致力于第五代移动通信(5G)核心技术的知识产权保护,并着力研究数据驱动的、基于人工智能的移动通信新技术;②欧洲主要在推进 5G 核心技术的实现,如大规模天线的核心挑战和商用, 同时,以德国等为主的几个国家,特别注重工业化4.0 所依赖的超可靠低时延移动通信系统研究;③ 日本以 NTT Docomo 为代表,重点研究 5G 商用的
《图 1.2.4》
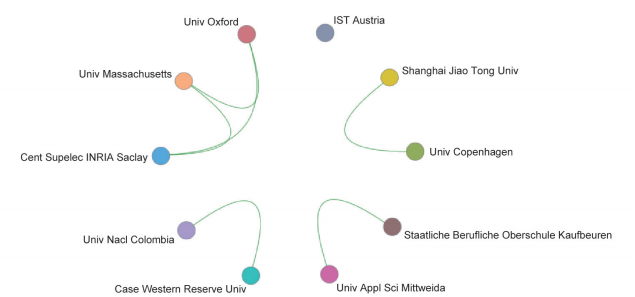
图 1.2.4 “可解释深度学习”工程研究前沿主要机构间的合作网络
《表 1.2.7》
表 1.2.7 “可解释深度学习”工程研究前沿中施引核心论文的主要产出国家或地区
| 序号 | 国家 / 地区 | 施引核心论文数 | 施引核心论文比例 | 平均施引年 |
| 1 | China | 53 | 26.77% | 2017.1 |
| 2 | USA | 49 | 24.75% | 2016.7 |
| 3 | UK | 16 | 8.08% | 2017.4 |
| 4 | Germany | 14 | 7.07% | 2017.3 |
| 5 | The Netherlands | 13 | 6.57% | 2017 |
| 6 | Colombia | 13 | 6.57% | 2015.6 |
| 7 | Canada | 12 | 6.06% | 2016.7 |
| 8 | Australia | 11 | 5.56% | 2016.5 |
| 9 | Singapore | 9 | 4.55% | 2017 |
| 10 | France | 8 | 4.04% | 2016.8 |
《表 1.2.8》
表 1.2.8 “可解释深度学习”工程研究前沿中施引核心论文的主要产出机构
| 序号 | 机构 | 施引核心论文数 | 施引核心论文比例 | 平均施引年 |
| 1 | Univ Nacl Colombia | 13 | 20.00% | 2015.6 |
| 2 | Case Western Reserve Univ | 12 | 18.46% | 2015.8 |
| 3 | Chinese Acad Sci | 8 | 12.31% | 2017.6 |
| 4 | Radboud Univ Nijmegen | 5 | 7.69% | 2016.2 |
| 5 | Nanyang Technol Univ | 5 | 7.69% | 2017 |
| 6 | Univ Adelaide | 5 | 7.69% | 2016.4 |
| 7 | Wuhan Univ | 5 | 7.69% | 2017.2 |
| 8 | Nanjing Univ Informat Sci & Technol | 4 | 6.15% | 2016.3 |
| 9 | Univ Florida | 4 | 6.15% | 2016.8 |
| 10 | Shanghai Univ | 4 | 6.15% | 2016.8 |
一系列核心问题,如大规模天线的实现。
目前基于 5G 的新一代移动通信技术研究主要围绕以下几个主流方向和分支开展:
(1) 信道测量和建模
5G 系统为了满足增强移动宽带(eMBB)业务的需求,在高频频段通信,因此围绕高频频段的信道测量和建模是重点研究方向之一;基于大数据的高频段信道建模也是未来重要的发展方向。
(2) 大规模天线
5G 系统进一步利用大规模天线提供频谱效率、支持更多用户接入。目前大规模天线,特别是对高频段大规模天线的研究仍有较多问题,第一次进行5G 大规模商用,实现层面的挑战也是重点研究方向之一。
(3) 海量连接
面向物联网、智慧城市、智慧电网等需求,海量连接场景下的无线通信仍将是重点研究方向之一。
(4) 超可靠低时延无线通信
目前尚无超可靠低时延无线通信的理论用于指导这一系统的具体设计,因此该研究方向将成为未来第六代移动通信(6G)研究重点之一。
其他诸如基于无人机的无线通信技术,基于能量采集和无线能量传输,特别是太空场景下基于无线能量传输的卫星间通信技术,也是新一代无线通信技术的研究重点。
未来移动通信技术将向以下几个重点方向发展:①存储、计算与通信的协同融合技术;②支持海量终端接入的泛在网络架构及超密集异构网络技术;③超可靠低时延移动通信系统的理论与实现;④面向场景和服务的智能移动通信系统设计;⑤数据驱动的移动通信系统的理论与实现;⑥超大规模移动通信网络的优化理论与实时实现;⑦空天地一体化无线通信系统设计与实现,特别是将地轨卫星与地面网络融合。
目前,新一代移动通信技术工程研究前沿中核心论文排名前三的国家为中国、加拿大、英国(见表 1.2.9)。其中,中国作者所发表的论文占比达到了 88.89%,排名第一,被引频次比例高达 98.70%。加拿大和英国分别排在第二位、第三位。根据核心论文的主要产出机构(见表 1.2.10)来 看,排名前 5 的机构为 Beijing Univ Chem Technol、Univ British Columbia、Tsinghua Univ、Univ Sheffield、Beijing Univ Posts & Telecommun、Kings Coll London、Univ Sci & Technol Beijing。其中,这些机构有 4 所位于中国, 2 所位于英国,1 所位于加拿大。从新一代移动通
《表 1.2.9》
表 1.2.9 “新一代移动通信技术”工程研究前沿中核心论文的主要产出国家或地区
| 序号 | 国家 / 地区 | 核心论文数 | 论文比例 | 被引频次 | 被引频次比例 | 篇均被引频次 |
| 1 | China | 8 | 88.89% | 381 | 98.70% | 47.63 |
| 2 | Canada | 7 | 77.78% | 228 | 59.07% | 32.57 |
| 3 | UK | 5 | 55.56% | 295 | 76.42% | 59 |
| 4 | Singapore | 1 | 11.11% | 115 | 29.79% | 115 |
| 5 | Taiwan of China | 1 | 11.11% | 53 | 13.73% | 53 |
| 6 | Australia | 1 | 11.11% | 18 | 4.66% | 18 |
| 7 | USA | 1 | 11.11% | 18 | 4.66% | 18 |
《表 1.2.10》
表 1.2.10 “新一代移动通信技术”工程研究前沿中核心论文的主要产出机构
| 序号 | 机构 | 核心论文数 | 论文比例 | 被引频次 | 被引频次比例 | 篇均被引频次 |
| 1 | Beijing Univ Chem Technol | 7 | 77.78% | 366 | 94.82% | 52.29 |
| 2 | Univ British Columbia | 6 | 66.67% | 223 | 57.77% | 37.17 |
| 3 | Tsinghua Univ | 5 | 55.56% | 344 | 89.12% | 68.8 |
| 4 | Univ Sheffield | 4 | 44.44% | 278 | 72.02% | 69.5 |
| 5 | Beijing Univ Posts & Telecommun | 3 | 33.33% | 175 | 45.34% | 58.33 |
| 6 | Kings Coll London | 3 | 33.33% | 43 | 11.14% | 14.33 |
| 7 | Univ Sci & Technol Beijing | 3 | 33.33% | 50 | 12.95% | 16.67 |
| 8 | Minist Educ China | 1 | 11.11% | 137 | 35.49% | 137 |
| 9 | Shanghai Jiao Tong Univ | 1 | 11.11% | 137 | 35.49% | 137 |
| 10 | Univ Elect Sci & Technol China | 1 | 11.11% | 137 | 35.49% | 137 |
信技术工程研究前沿主要国家或地区间的合作网络(见图 1.2.5)可看出,中国、加拿大、英国间存在较密切的合作关系。从新一代移动通信技术工程研究前沿主要机构间的合作网络(见图 1.2.6) 可看出,各机构间合作关系较为密切。从施引核心论文的主要产出国家和地区统计结果(见表1.2.11)来看,中国、加拿大和美国名列前三。其中,中国以 157 篇的论文数高居榜首,所占比例达到 48.61%。从施引核心论文的主要产出机构(见表 1.2.12)来看,排名前十的机构中,中国占据了 8 席,其中 Beijing Univ Posts & Telecommun 和 Tsinghua Univ 分别以 34 和 17 的施引核心论文数位列第一和第三,所占施引核心论文比例分别为 24.46% 和 12.23%,而排名第二的是加拿大的Univ British Columbia,其施引核心论文数为 23, 占比为 16.55%。
《图 1.2.5》

图 1.2.5 “新一代移动通信技术”工程研究前沿主要国家或地区间的合作网络
《图 1.2.6》
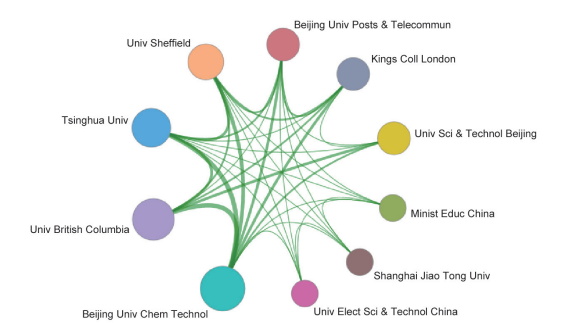
图 1.2.6 “新一代移动通信技术”工程研究前沿主要机构间的合作网络
《表 1.2.11》
表 1.2.11 “新一代移动通信技术”工程研究前沿中施引核心论文的主要产出国家或地区
| 序号 | 国家 / 地区 | 施引核心论文数 | 施引核心论文比例 | 平均施引年 |
| 1 | China | 157 | 48.61% | 2016.4 |
| 2 | Canada | 45 | 13.93% | 2016 |
| 3 | USA | 26 | 8.05% | 2016.3 |
| 4 | South Korea | 25 | 7.74% | 2016.7 |
| 5 | UK | 23 | 7.12% | 2016 |
| 6 | Iran | 12 | 3.72% | 2016.4 |
| 7 | Australia | 11 | 3.41% | 2016.3 |
| 8 | India | 9 | 2.79% | 2016.7 |
| 9 | Singapore | 8 | 2.48% | 2016.3 |
| 10 | Taiwan of China | 7 | 2.17% | 2016.4 |
《表 1.2.12》
表 1.2.12 “新一代移动通信技术”工程研究前沿中施引核心论文的主要产出机构
| 序号 | 机构 | 施引核心论文数 | 施引核心论文比例 | 平均施引年 |
| 1 | Beijing Univ Posts & Telecommun | 34 | 24.46% | 2016.2 |
| 2 | Univ British Columbia | 23 | 16.55% | 2016 |
| 3 | Tsinghua Univ | 17 | 12.23% | 2016.1 |
| 4 | Southeast Univ | 17 | 12.23% | 2016.3 |
| 5 | Xidian Univ | 12 | 8.63% | 2016.3 |
| 6 | China Univ Min & Technol | 9 | 6.47% | 2016.1 |
| 7 | Nanjing Univ Posts & Telecommun | 8 | 5.76% | 2016.6 |
| 8 | Chinese Acad Sci | 7 | 5.04% | 2016.4 |
| 9 | Univ Essex | 6 | 4.32% | 2015.8 |
| 10 | Beijing Univ Chem Technol | 6 | 4.32% | 2016.3 |
《2 工程开发前沿》
2 工程开发前沿
《2.1 Top10 工程开发前沿发展态势》
2.1 Top10 工程开发前沿发展态势
信息与电子工程领域组所研判的 Top 10 工程开发前沿汇总见表 2.1.1,涉及电子科学与技术、光学工程与技术、仪器科学与技术、信息与通信工程、计算机科学与技术、控制科学与技术等学科方向。各个开发前沿所涉及的核心专利自 2012 年至2017 年的逐年公开情况见表 2.1.2。
(1) 无人机与车辆自主驾驶技术
无人机是指依靠系统自身感知、处理和运行能力,根据外部环境实时变化自主决策,完成既定任务的飞行器。车辆自主驾驶技术是以高精度地图为基础,辅以车载传感设备收集数据,通过具有深度学习能力的智能算法的识别、运算做出相应决策, 自主控制车辆行驶的技术。无人驾驶、自主控制能够极大提升系统性能,减轻人员负担,是飞机与车辆的未来发展方向。随着传感器技术、网络技术、信息技术、人工智能技术的快速发展,无人机和自主驾驶车辆技术不断取得重要突破,系统性能持续提升,逐步开始实际应用。
(2) 多维度图像信息获取、处理与融合技术
图像信息融合能够以软件手段把对同一目标或场景的不同图像,综合成对同一目标或场景的准确
《表 2.1.1》
表 2.1.1 信息与电子工程领域 Top10 工程开发前沿
| 序号 | 工程开发前沿 | 公开量 | 被引频次 | 平均被引频次 | 平均公开年 |
| 1 | 无人机与车辆自主驾驶技术 | 177 | 14 988 | 84.68 | 2013.8 |
| 2 | 多维度图像信息获取、处理与融合技术 | 33 | 1200 | 36.36 | 2013.97 |
| 3 | 虚拟现实与增强现实系统的显示、交互和操控技术 | 45 | 1980 | 44 | 2014.33 |
| 4 | 光纤通信与全光网络 | 156 | 6166 | 39.53 | 2013.28 |
| 5 | 网络安全中的身份认证与访问控制 | 23 | 1278 | 55.57 | 2013.7 |
| 6 | 云计算平台 | 111 | 9269 | 83.5 | 2013.05 |
| 7 | 人 – 机交互传感方法及应用 | 39 | 1534 | 39.33 | 2013.38 |
| 8 | 阵列式传感器及阵列传感大数据处理技术 | 64 | 2800 | 43.75 | 2012.83 |
| 9 | 宽带无线通信系统 | 83 | 7121 | 85.8 | 2013.14 |
| 10 | 基于非易失性存储器的新型存储系统 | 50 | 4480 | 89.6 | 2013.02 |
《表 2.1.2》
表 2.1.2 信息与电子工程领域 Top10 工程开发前沿核心专利逐年公开量
| 序号 | 工程开发前沿 | 2012 年 | 2013 年 | 2014 年 | 2015 年 | 2016 年 | 2017 年 |
| 1 | 无人机与车辆自主驾驶技术 | 35 | 26 | 67 | 38 | 10 | 1 |
| 2 | 多维度图像信息获取、处理与融合技术 | 5 | 9 | 7 | 8 | 2 | 2 |
| 3 | 虚拟现实与增强现实系统的显示、交互和操控技术 | 8 | 5 | 9 | 12 | 9 | 2 |
| 4 | 光纤通信与全光网络 | 60 | 45 | 21 | 13 | 11 | 6 |
| 5 | 网络安全中的身份认证与访问控制 | 2 | 10 | 6 | 3 | 2 | 0 |
| 6 | 云计算平台 | 43 | 33 | 26 | 6 | 2 | 1 |
| 7 | 人 – 机交互传感方法及应用 | 11 | 9 | 14 | 3 | 2 | 0 |
| 8 | 阵列式传感器及阵列传感大数据处理技术 | 30 | 19 | 12 | 2 | 1 | 0 |
| 9 | 宽带无线通信系统 | 35 | 25 | 8 | 9 | 3 | 3 |
| 10 | 基于非易失性存储器的新型存储系统 | 18 | 18 | 10 | 3 | 1 | 0 |
描述。军事、医学、自然资源勘探、海洋资源管理、环境和土地利用管理、地形地貌分析、生物学等的应用需求有力地刺激了图像处理和图像融合技术的发展。随着遥感技术的发展,获取遥感数据的手段越来越丰富,各种传感器获得的影像数据在同一地区形成影像金字塔,图像融合技术实现多源数据的优势互补,为提高这些数据的利用效益提供了有效途径。良好的图像融合方法能够为后续计算机自动化处理奠定坚实基础。
(3) 虚拟现实与增强现实系统的显示、交互和操控技术
虚拟现实技术利用计算机模拟产生一个纯虚拟的三维空间,在这个虚拟空间中给人们提供一个与客观世界相一致的感知体验。增强现实技术则将计算机模拟的虚拟环境与现实环境进行多层次融合, 通过将虚拟信息叠加到现实环境,增强人们对现实环境的感知,借助实物或实际场景的信息模型来增强用户对虚拟物体体验的真实感。无论是虚拟现实技术还是增强现实技术,都极大扩展了人类感知、认识世界的能力,使人类可以不受时空限制,去经历和体验世界上早已发生或尚未发生的事件,观察和研究同一事件在各种假想条件下的发生和发展过程,深入到人类生理活动难以到达的宏观或微观世界去研究和探索,从而为人类认识和改造世界提供了全新方法和手段。为了让人们对虚拟环境 / 物体获得与真实世界等同的感知,必须从几何、外观、物理、行为等多个方面对虚拟环境 / 物体进行真实感建模,并实时生成虚拟环境/ 物体满足人们视觉、听觉、触觉等多种感知渠道所需的模拟信息。因此, 虚拟现实与增强现实系统综合了计算机图形技术、计算机模拟仿真技术、人工智能、传感技术、显示技术、交互技术等多个技术类别,是高度集成化的计算机计算模拟系统。
(4) 光纤通信与全光网络
光纤通信技术是指一种利用光信号与光纤传递信息的方式。光信号经过不同调制方式后能够携带大量信息。光纤主要制作材料为玻璃,本身属于电气绝缘体,无需考虑接地回路问题。由于光纤通信系统具有通信容量大(目前已达几十 Tbps)、传输距离长、抗干扰性能强、保密性好、成本低等优势,发展迅猛,得到业界持续广泛关注,尤其在现今信息大爆炸时代,光纤通信技术的应用对于通信行业的发展乃至整个社会的变革做出了巨大贡献。全光网指的是网络传输和交换过程中全部通过光信号处理实现,因为不必在其中实现电光和光电转换,因此能够大幅提升传输带宽,同时降低功耗和节省成本。全光网主要技术有光纤技术、波分复用技术、光交换技术(ROADM、OXC 等)、无源光网技术(FTTX)、光纤放大器技术(EDFA、拉曼放大)等。
光纤通信与全光网络的快速发展,为“提速降费”的国家战略奠定了基础。
(5) 网络安全中的身份认证与访问控制
身份认证也称为“身份验证”或“身份鉴别”, 是指在计算机及计算机网络系统中确认操作者身份的过程,从而确定该用户是否具有对某种资源的访问和使用权限,进而使计算机和网络系统的访问策略能够可靠、有效地执行,防止攻击者假冒合法用户获得资源的访问权限,保证系统和数据的安全, 以及授权访问者的合法利益。
目前主流身份认证与访问控制技术包括:基于口令的身份认证与访问控制技术;基于智能卡的身份认证与访问控制技术;基于密码的身份认证与访问控制技术;基于区块链技术的身份认证与访问控制;基于生物特征的身份认证与访问控制技术。
身份认证与访问控制技术发展趋势将在以下几个方面突破和发展:①多种身份认证与访问控制技术相结合,提供认证安全性和有效性。例如,口令认证的方式简单易行,基于密码的认证方式技术算法比较成熟、稳定,智能卡具有高安全特性,而指纹虹膜等生物特征具有很好的唯一性,不会丢失或冒用,把各自优势结合起来,可以产生更好效果。②基于智能合约的去中心化分布式验证技术,可以利用 Token 的方式对系统中用户的身份、权限及访问控制进行智能化控制。③基于用户属性的身份认证与访问控制技术,采用基于身份加密机制,利用用户邮箱、身份 ID 等属性作为输入凭证,解决传统密码机制不友好,不可恢复的问题。④认证的标准化,通过指定统一的标准,解决不同应用系统认证机制兼容问题。
(6) 云计算平台
云计算平台能够让用户以按需方式,通过网络方便地访问云系统中的可配置资源共享池,如服务器、网络、存储、应用程序和各种服务,同时以最少管理开销及与供应商最少交互,迅速配置提供或释放资源。云计算的最终目标是将计算、服务和应用作为一种公共设施提供给公众,使人们能够像使用水、电等资源那样使用各类 IT 资源,并按实际用量付费,而不需要自建。为此,云计算被公认为是继个人计算和互联网变革之后的第三次革命,世界上主要国家均将其列入国家整体发展战略,并当作未来信息化的制高点布局和推进。
云计算平台提供的服务可以分为基础设施即服 务(IaaS)、平台即服务(PaaS)和软件即服务(SaaS) 三个层次,并按照部署形态可分为公有云、私有云、混合云等种类。云计算平台实现的关键技术包括服务器虚拟化技术、分布式计算技术、分布式存储、软件定义网络、云安全技术等。云计算平台已成为互联网时代信息技术基础设施的主要形态,并且由公有云加私有云或多个私有云构成混合云正在成为多数企业和组织向云计算转型的优先选择。云计算平台本身也在迭代演化,出现了移动云、边缘云等新型模式,并为大数据、物联网、人工智能、区块链等新兴应用融合发展提供基础支撑。
(7) 人 – 机交互传感方法及应用
人机交互技术在用户与计算设备之间建立起信息交流的界面和通道。从早期手工纸带、命令行界面、图形用户界面,到现在的多点触控界面、实物用户界面,当前人机交互技术正进入高效、智能、隐形的自然交互阶段。在以人为中心的交互过程中, 计算机通过感知用户的语音、表情、姿态、生理数据等各类信息,准确识别用户的交互指令,并建模用户的文化背景、个性习惯、情绪偏好等上下文, 更为准确地理解用户的交互意图,预测交互行为, 大幅减轻用户在交互过程中的认知负担。人机交互传感的关键方法主要有:基于语音及其他声音信号的交互传感方法、基于笔迹或触点数据的交互传感方法、基于行为表情理解的交互方法、基于情感计算的交互传感方法以及基于生理计算的交互传感方法等。
新型交互设备将采用一种或者多种关键传感方法,提高对用户交互意图理解的准确率;通过投影、体感、声音、气味等各类人工感觉技术,构建用户体验逼真的虚拟环境,提升人与机之间信息交互的带宽,建立新的人机交互界面,为新一代计算系统带来全新的服务体验。人机交互传感方法是穿戴计算系统、智能生活空间系统、游戏娱乐系统、虚拟 / 增强 / 混合现实系统的关键支撑技术,广泛应用于媒体、娱乐、教育、医疗、国防等各个重要领域。
(8) 阵列式传感器及阵列传感大数据处理技术
阵列式传感器被广泛应用于雷达、通信、导航、声纳、麦克风、地震监测以及其他一些领域。阵列式传感技术是将一组传感器按一定方式布置在空间不同位置上,从而形成接收多维空间信号的传感器阵列。阵列信号处理是对空间信号进行特定处理, 以提取有用的信号特征。与单一传感器的一维信号处理相比,阵列信号处理具有灵活的波束控制、较高的信号增益以及很好的空间分辨能力。阵列传感器是硬件基础,其布放形式、分布范围和个数对最终信息提取有重要影响;阵列信号处理算法作为软件部分,更直接关系到相关信息提取的正确性和有效性。阵列信号处理的理论研究始于 20 世纪 60 年代,先后集中在自适应波束控制和空间谱估计上。近 20 年超分辨率谱估计技术受到重视,但是超分辨算法的运算量普遍较大,算法实时实现的软硬件是一个研究前沿。
随着传感器品种和数量不断增加以及信号采集技术迅速提高,采集到的信号数据量急剧增加,信号在空域和频域上分布范围不断拓宽。传感器及其信号处理技术也正在从传统应用领域进入天文、能源、金融、地理科学、安全保障以及社会网络等多个新领域。信号在带宽、维数、分辨率以及采集网络化上的快速发展,使得信号采集数据增长率高于数据存储增长率和信号处理速度增长率,信号处理进入大数据时代。
大数据背景下的信号处理主要发展方向包括: 开发智能传感器、集信号采集、压缩和处理于一体, 以降低信号的通信量,并提取有价值信号;发展新的多传感器信息融合算法,以处理复杂多源信息, 解决不同数据源的时空配准问题、异类数据融合问题;发展高速信号处理核心技术,以提高 I/O 带宽和实时信号处理能力;引入人工智能大数据处理技术,以提高数据整合、融合和协同分析能力,提高数据挖掘效能。
(9) 宽带无线通信系统
新一代移动通信系统是移动通信系统演进过程中的一个阶段和目标,它不仅采用新的无线传输技术提高通信系统性能,而且与现有各种有线与无线网络融合;它不仅包含现有移动蜂窝网络结构,而且在某些环境下也可以采用 Ad-hoc 方式组网,或者采用两种结构的组合形式,形成蜂窝网络下的两跳或多跳网络结构方式。一般而言,蜂窝网络是一种广覆盖的网络组网方式,目标是在有限频率和功率资源下实现广域无线覆盖。与蜂窝网络结构相比,Ad-hoc 移动网络结构形式更加灵活,它采用分布式管理技术,由一组自主的无线节点相互合作形成移动通信网络,其中,无线节点既是一般意义上的移动终端,又可以作为无线中继和路由设备转发其他用户数据,因此具有动态搜索、快速建网和网络自恢复能力,有着广泛应用前景。鉴于 Ad hoc在无线组网和下一代无线网络的重要地位,IETF(Internet Engineering Task Force)已成立 MANET 工作组,进行 Ad-hoc 网络研究。此外,近几年来, 随着超宽带(UWB)技术的发展和应用,无线网络中的节点在工作时可以发送大量非常短和快的能量脉冲,其发射信号功率谱密度较低,非常适合作为新一代移动通信系统中个域网络的实现技术。
随着基于控制与承载相分离思想的软交换技术不断发展与成熟,以及基于交换与业务控制相分离的可以快速实现各种增值业务的智能网技术的广泛应用,它们在新一代移动通信系统中将发挥更大作用。此外,随着 IP 技术的广泛应用,业界广泛认为基于新一代移动通信的通信网络结构发展趋势是以 IP 网络为核心。同时,伴随网络容量和用户的快速发展,IPv6 技术将成为下一代网络的核心协议。
无线通信系统趋于融合:①各无线通信系统内的不同适用标准开始求同存异,实行互补,趋于融合;②各系统间通过磨合不断趋于融合,各系统也不断完善;③无线通信系统与 Internet 之间趋于融合,有利于实现 IP 业务传输的透明化。
(10) 基于非易失性存储器的新型存储系统
传统存储器的速度等性能比 CPU 相差很大,已成为制约整个计算系统的最大瓶颈。另一方面, 移动终端、大数据、云计算、机器学习等新兴应用的快速发展,对存储器的读写性能、I/O 速度、带宽、容量的要求不断提高,现有的缓存(SRAM)/ 主 存(DRAM)/ 硬 盘(Flash 或者 HDD)的多层存储架构已远远不能满足要求,存储器与 CPU 之间的矛盾日益突出,急需性能优越的新一代非易失存储器去取代 DRAM 和 Flash。因应这一需求,IBM 于 2008 年提出了被命名为 Storage-Class- Memory(SCM)的新的存储器概念,它的定义是即具备非易失性、大容量、低成本等硬盘拥有的优点,又具备读写速度快、可靠性高、可字节寻址等 DRAM 拥有的优点。经过几十年的研发,目前已有多种非易失存储器技术具有成为 SCM 的潜力,包括 STT-MRAM、PCRAM(Intel 最新发布的 3D-xPoint)、ReRAM、FRAM 等。SCM 又 分为两大类,以主存为目标的 Memory-SCM 和以数据储存为目标的 Storage-SCM。在性能指标上, Memory-SCM 要求为耐久性大于 109,读写延迟小于 200 ns,以便能够与 DRAM(50 ns 级别)一起作为同级主存使用而不必通过 I/O 控制器。拥有这些性能指标的非易失 Memory-SCM 能解决一系列传统存储系统的问题,将全面地优化提升存储系统, 甚至彻底改变整个计算架构。
随着数据量增加,计算架构一大发展趋势是大幅度增加缓存容量和主存容量。如果用传统 SRAM 和 DRAM 来实现扩容,由于其易失性,它们需要与速度慢多个数量级的外部存储(Flash 或 HDD) 配合使用,这反而会导致整个系统的性能指标降低。Memory-SCM 的快速及非易失性可以很好地解决这个矛盾,不仅实现存储器扩容,减少内部处理开销,也将极大提高整体性能。Memory-SCM 可以取代内存中的 DRAM,由于 SCM 的低成本高密度特征,内存容量可以大幅度提高,其数据是“非易失”的,因此即可以大幅度提高与 CPU 数据交换效率,同时也减少了与 Flash/HDD 之间的数据交换。在一些特定的应用场景,内存的所有 DRAM 都可以用 SCM 取代,尤其是用耐久性可达到 1014 的 STT-MRAM。不过大多数情况下,由于新型的非易失存储器的耐久性及读写速度都比DRAM 差, 主存中依然需要保留部分 DRAM,与 SCM 组成混合主存系统。这种混合主存系统需要开发全新的主存数据管理系统、缓冲区管理算法、存储器界面和接口 / 互联技术,以同时管理两种不同的存储器。同时需要开发出针对 SCM 技术特点的故障管理算法,以及弥补SCM 低耐久性弱点的磨损均衡算法, 并将读写频繁的“热数据”转移到 DRAM 上,以减少 SCM 的磨损,从而延长 SCM 的整体使用寿命。比如新型的 Start-Gap 算法可以把耐久性只有107 的 SCM 的使用寿命延长到 3 年。产业界已经开发了多种这样的 SCM/DRAM 混合主存系统,比如亚马逊发发布的云计算系统 x1e 中使用的 16 TB 混合内存。SCM 取代 DRAM 的另一个优点是降低能耗,因为 SCM 不需要像 DRAM 那样不断刷新。在大型计算系统中至少 1/3 的电力消耗在存储器系统中,而 SCM 取代 DRAM 可以极大地降低能耗。另一类非易失存储器 Storage-SCM 的应用目标是取代硬盘。与 Flash 相比,SCM 的优点包括速度更快、功耗更低等。
以上新型架构虽然比 SRAM/DRAM/Flash 系统优化了很多,但还有一个缺陷制约了其综合性能: 数据需要在不同功能块之间传递,因此消耗了过多的时间和电力。更彻底的改进是把现有的冯·诺伊曼计算架构全盘推翻,放弃以 CPU 为中心的架构, 改成全新的“以数据为中心的计算架构”(非冯氏架构)并从头开始重新设计软件和硬件的界面。在以数据为中心的计算架构中,数据存储在大容量的非易失 SCM 存储器阵列中(称为“通用存储器”), 系统不再是把数据送到 CPU 去进行运算,而是采用分布式 CPU 将 CPU 计算功能围绕着数据进行布局,以便对数据进行就近计算。IBM 的模拟计算显示,采用非易失 SCM 存储器技术的以数据为中心的计算架构的性能,将比冯氏架构在速度、能耗、占地空间等多个指标上提高多个数量级。
《2.2 Top3 工程开发前沿重点解读》
2.2 Top3 工程开发前沿重点解读
2.2.1 无人机与车辆自主驾驶技术
无人机的自主控制分为自主运动控制层、自主任务控制层、自主协同控制层 3 个层面 , 核心关键技术主要是无人系统复杂环境自适应控制技术、面向任务的无人系统自主控制技术、无人系统协同控制技术。复杂环境自适应控制技术主要解决无人系统在复杂条件下自主运动控制问题。面向任务的无人系统自主控制技术主要解决无人系统在对抗环境下执行复杂任务时的自主决策与控制问题。无人系统协同控制技术主要解决多个无人系统协同执行任务时的控制与决策问题。
自动驾驶的分级目前以国际汽车工程师学会提出的 0~5 级分级为主流(见表 2.2.1)。L0 是完全没有辅助系统,由驾驶员掌握车辆操作;L1 是仍由驾驶员操作车辆,但植入个别的辅助系统;L2 是仍由驾驶员掌控车辆,但可透过主动式驾驶安全辅助系统减轻负担;L3 则允许在特定状况下让系统接管车辆操作,但系统判断需要驾驶操作时,驾驶员则必须接管车辆;L4 以上,主要控制车辆的已经是辅助系统,但在极端情况下,仍需驾驶员接手;L5 就是完全无须驾驶员的无人自驾车,人完全成为乘客。
自主驾驶的核心关键技术主要包括传感器技术、高精度地图技术、车辆与环境交互技术和自主决策技术。传感器相当于自动驾驶汽车的眼睛。汽车通过它识别道路、其他车辆、行人障碍物和基础交通设施。传感器通常分为激光雷达、传统雷达和摄像头 3 种。高精度地图通过车辆准确定位,将车辆准确地还原在动态变化的立体交通环境中。为实现自主驾驶的安全性,高精度地图需要达到厘米级的精确程度。车辆与环境交互技术是指车辆与周围的环境,如车辆、交通设施、云端数据库等交互信息的技术,帮助自动驾驶车辆掌握实时驾驶信息和路况信息,为决策提供信息支撑。自主决策技术支撑自主驾驶的最关键部分,目前主要采用机器学习与人工智能算法来实现。
无人机技术近年来不断取得突破,各种类型的无人机广泛应用于生产、生活和作战。在高性能无人机方面,美国一直走在世界的前列,研发列装了一系列高性能的军用无人机。美国的 MQ- 9“死神”无人机兼具侦察监视与火力打击能力, 在实战应用中取得良好效果。X-47B 无人作战飞机成功在航母上自主起飞和着舰,并具备多平台协同能力。下一步,无人机的控制将由简单的遥控、程控向人机智能融合的交互控制方式转变,并逐步向全自主控制方式发展;系统的体系结构由专用化、单一化向通用化、标准化方向发展;应用模式由单平台独立运用向多平台协同,特别是集群应用方向发展。
车辆自主驾驶技术的发展相对还比较滞后,仍处在 L2 阶段。但各大汽车厂商和科技公司近年来都加大了自主驾驶技术的发展力度,预计将在不久的将来取得重大进展。谷歌在 2009 年就开始自主驾驶技术研究,其无人驾驶汽车已经完成 600 万英里的路测和 50 亿英里虚拟路测。特斯拉自动驾驶系统的级别已达到L2,并不断迭代更新。在国内, 百度在 2013 年启动无人车项目,2015 年成立专门的自动驾驶事业部,直接研发 L4 级超高度自动驾驶技术。2018 年 4 月,完成全球首款 L4 级量产自动驾驶巴士“阿波龙”的量产下线。提高系统的可靠性、对环境的适应能力以及降低系统成本是未来
《表 2.2.1》
表 2.2.1 自主驾驶系统等级列表
| 等级 | 叫法 | 转向、加减速控制 | 对环境的观察 | 激烈驾驶的应对 | 应对工况 |
| L0 | 人工驾驶 | 驾驶员 | 驾驶员 | 驾驶员 | — |
| L1 | 辅助驾驶 | 驾驶员 + 系统 | 驾驶员 | 驾驶员 | 部分 |
| L2 | 半自动驾驶 | 系统 | 驾驶员 | 驾驶员 | 部分 |
| L3 | 高度自动驾驶 | 系统 | 系统 | 驾驶员 | 部分 |
| L4 | 超高度自动驾驶 | 系统 | 系统 | 系统 | 部分 |
| L5 | 全自动驾驶 | 系统 | 系统 | 系统 | 全部 |
的发展方向。
无人机与车辆自主驾驶技术的重点开发国家和机构,各国专利在全球的部署情况,企业核心专利量及被引量占比、产学研合作情况见表 2.2.2、表2.2.3、图 2.2.1 和图 2.2.2。
2.2.2 多维度图像信息获取、处理与融合技术
近年来,随着传感器技术的发展,信息表现形式多样化,信息数量巨大化,信息关系复杂化,以及要求信息处理的及时性、准确性和可靠性都是前所未有的。这就使得利用计算机技术对获得的多源信息在一定的准则下进行分析、优化综合以完成所需的估计和决策(即多传感器信息融合技术)得以迅速发展。信息融合可以描述为:综合多源的信息, 得到高品质的有用的信息。各种单一的传感器往往不能从场景中提取足够的信息,以至于很难甚至无法独立获得对一副场景的全面描述。需要多传感器的同时获取目标数据进行融合分析,才可有效地进
《表 2.2.2》
表 2.2.2 “无人机与车辆自主驾驶技术”工程开发前沿中核心专利的主要产出国家或地区
| 序号 | 国家 / 地区 | 公开量 | 公开量比例 | 被引频次 | 被引频次比例 | 平均被引频次 |
| 1 | USA | 154 | 87.01% | 13 112 | 87.48% | 85.14 |
| 2 | Germany | 6 | 3.39% | 435 | 2.90% | 72.5 |
| 3 | Japan | 6 | 3.39% | 650 | 4.34% | 108.33 |
| 4 | China | 5 | 2.82% | 318 | 2.12% | 63.6 |
| 5 | Canada | 4 | 2.26% | 331 | 2.21% | 82.75 |
| 6 | UK | 2 | 1.13% | 131 | 0.87% | 65.5 |
| 7 | Israel | 2 | 1.13% | 148 | 0.99% | 74 |
| 8 | Ireland | 1 | 0.56% | 101 | 0.67% | 101 |
| 10 | South Korea | 1 | 0.56% | 85 | 0.57% | 85 |
《表 2.2.3》
表 2.2.3 “无人机与车辆自主驾驶技术”工程开发前沿中核心专利的主要产出机构
| 序号 | 机构 | 公开量 | 公开量比例 | 被引频次 | 被引频次比例 | 平均被引频次 |
| 1 | FORD | 26 | 14.69% | 1700 | 11.34% | 65.38 |
| 2 | GOOG | 20 | 11.30% | 1386 | 9.25% | 69.3 |
| 3 | FLXT | 15 | 8.47% | 1964 | 13.10% | 130.93 |
| 4 | GENK | 9 | 5.08% | 632 | 4.22% | 70.22 |
| 5 | MGIN | 7 | 3.95% | 553 | 3.69% | 79 |
| 6 | AUTO | 6 | 3.39% | 1102 | 7.35% | 183.67 |
| 7 | DJII | 5 | 2.82% | 318 | 2.12% | 63.6 |
| 8 | HOND | 4 | 2.26% | 510 | 3.40% | 127.5 |
| 9 | BOSC | 3 | 1.69% | 233 | 1.55% | 77.67 |
| 10 | HONE | 3 | 1.69% | 341 | 2.28% | 113.67 |
注:FORD 表示 Ford Global Technologies Inc;GOOG 表示 Google Inc;FLXT 表示 Flextronics AP LLC;GENK 表示 GM Global Technologies Operations Inc;MGIN 表示 Magna Electronics Inc;AUTO 表示 Autoconnect Holdings LLC;DJII 表示 SZ Dji Technology Co Ltd;HOND 表示 Honda Motor Co Ltd;BOSC 表示 Bosch Gmbh Robert;HONE 表示 Honeywell Int Inc。
《图 2.2.1》

图 2.2.1 “无人机与车辆自主驾驶技术”工程开发前沿的主要国家或地区间合作网络
《图 2.2.2》
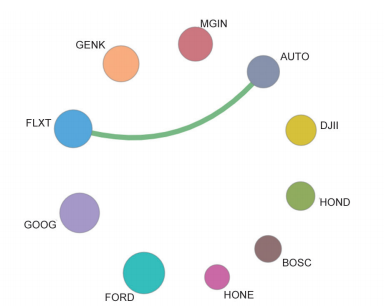
图 2.2.2 “无人机与车辆自主驾驶技术”工程开发前沿的主要机构间合作网络
行分类识别决策。
作为信息融合的一种,图像融合是对多个场景信息的综合。图像融合技术是一种先进的综合多个源图像信息的图像处理技术。所谓多源或者多维图像融合是对多个传感器采集到的关于同一场景或目标的多个源图像进行适当的融合处理,以获取对同一场景的更为准确、更为全面、更为可靠的图像描述。图像是二维信号,图像融合技术是多源信息融合技术的一个重要分支,因此,图像融合与多传感器信息融合具有共同的优点。通过图像融合可以强化图像中的有用信息、增加图像理解的可靠性、获得更为精确的结果,使系统变得更加实用。同时, 使系统具有良好的鲁棒性,如可以增加置信度、减少模糊性、改善分类性能等。
目前,将图像融合技术应用于数字图像处理的主要目的存在以下几种:①增加图像中有用信息的含量,改善图像的清晰度,增强在单一传感器图像中无法看见 / 看清的某些特征;②改善图像的空间分辨率,增加光谱信息的含量,为改善检测/ 分类/ 理解 / 识别性能获取补充的图像信息;③通过不同时刻的图像序列融合来检测场景/ 目标的变化情况;④通过融合多个二维图像产生具有立体视觉的三维图像,可用于三维重建或立体摄影、测量等;⑤利用来自其他传感器的图像来代替 / 弥补某一传感器图像中的丢失 / 故障信息。
一般来说,图像融合可以在以下 3 个层次上进行:①像素级。像素级融合是在获取图像信息上进行融合,它能够保留较多信息,提高融合精度,然而由于处理的信息量大,融合效率较低,实时性较差,同时像素级融合图像经过精确配准,否则融合结果容易出现较大误差。②特征级。在特征级融合的过程中,首先需要对图像进行特征提取,然后依据提取的特征信息对数据采用特征级融合算法进行综合分析和处理。在这一过程中,信息量极大地得以压缩,有利于实时处理,同时融合结果最大限度地给出决策分析所需的信息。③决策级。决策级融合作为最高水平的融合,融合的结果为指挥、控制、决策提供依据,因此融合结果直接影响着决策水平, 决策级融合能够在某些数据源丢失的情况下给出决策,所以具有容错性,此外,与前两个层次相比, 决策级融合实时性好、数据要求低、分析能力强, 然而对预处理及特征提取有较高要求,所以决策级融合的代价较高。通常,3 级融合可以搭配使用以达到较好融合效果。
图像融合中所用到的信息融合方法可分为六大类别:基于代数方法、成分代替方法、多尺度分解方法、统计学方法、变分方法和基于学习的方法。图像融合是当前图像分析领域的一个重要课题,它有着较为广泛的应用方向,如医学研究、地图绘制、隐匿武器查验等。好的融合图像能为后续的目标识别、分类等计算机自动化处理奠定良好的基础。
多维度图像信息获取、处理与融合技术的重点开发国家和机构,各国专利在全球的部署情况,企业核心专利量及被引量占比、产学研合作情况见表2.2.4、表 2.2.5、图 2.2.3 和图 2.2.4。
2.2.3 虚拟现实与增强现实系统的显示、交互和操控技术
虚拟现实与增强现实技术都需要在虚拟环境中构建真实世界的模型,这就需要依赖于现实环境的数据采集与建模技术。当前这项技术的发展趋势是
《表 2.2.4》
表 2.2.4 “多维度图像信息获取、处理与融合技术”工程开发前沿中核心专利的主要产出国家或地区
| 序号 | 国家 / 地区 | 公开量 | 公开量比例 | 被引频次 | 被引频次比例 | 平均被引频次 |
| 1 | USA | 24 | 72.73% | 940 | 78.33% | 39.17 |
| 2 | Japan | 3 | 9.09% | 80 | 6.67% | 26.67 |
| 3 | Canada | 1 | 3.03% | 33 | 2.75% | 33 |
| 4 | Switzerland | 1 | 3.03% | 19 | 1.58% | 19 |
| 5 | Germany | 1 | 3.03% | 40 | 3.33% | 40 |
| 6 | Finland | 1 | 3.03% | 24 | 2.00% | 24 |
| 7 | UK | 1 | 3.03% | 35 | 2.92% | 35 |
| 8 | Israel | 1 | 3.03% | 27 | 2.25% | 27 |
| 9 | South Korea | 1 | 3.03% | 24 | 2.00% | 24 |
| 10 | Sweden | 1 | 3.03% | 33 | 2.75% | 33 |
《表 2.2.5》
表 2.2.5 “多维度图像信息获取、处理与融合技术”工程开发前沿中核心专利的主要产出机构
| 序号 | 机构 | 公开量 | 公开量比例 | 被引频次 | 被引频次比例 | 平均被引频次 |
| 1 | PELI | 9 | 27.27% | 428 | 35.67% | 47.56 |
| 2 | FOTO | 5 | 15.15% | 241 | 20.08% | 48.2 |
| 3 | LYTR | 4 | 12.12% | 157 | 13.08% | 39.25 |
| 4 | MICT | 4 | 12.12% | 165 | 13.75% | 41.25 |
| 5 | CANO | 2 | 6.06% | 57 | 4.75% | 28.5 |
| 6 | AMSH | 1 | 3.03% | 33 | 2.75% | 33 |
| 7 | APPY | 1 | 3.03% | 31 | 2.58% | 31 |
| 8 | ASPE | 1 | 3.03% | 27 | 2.25% | 27 |
| 9 | ETRO | 1 | 3.03% | 46 | 3.83% | 46 |
| 10 | GENE | 1 | 3.03% | 33 | 2.75% | 33 |
注:PELI 表示 Pelican Imaging Corp;FOTO 表示 Fotonation Cayman Ltd;LYTR 表示 Lytro Inc;MICT 表示 Microsoft Corp; CANO 表示Canon Kabushiki Kaisha;AMSH 表示 Amersham Pharmacia Biotech Inc;APPY 表示 Apple Inc;ASPE 表示 Aspect Imaging Ltd;ETRO 表示 Etron Technologies Inc;GENE 表示 GE Healthcare Bio-Sci Corp。
《图 2.2.3》
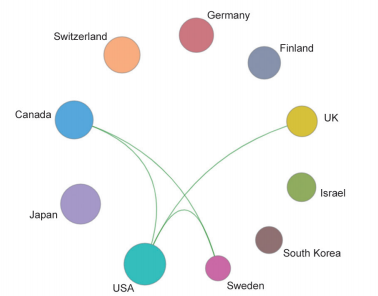
图 2.2.3 “多维度图像信息获取、处理与融合技术”工程开发前沿的主要国家或地区间合作网络
《图 2.2.4》

图 2.2.4 “多维度图像信息获取、处理与融合技术”工程开发前沿的主要机构间合作网络
建模对象更广,采集的数据维度、精度和效率更高。建模对象不再局限于几何表面,还包括外观、光照、纹理、双向反射率等。在数据维度方面,除了静态数据,还包含时间维度的动态几何、动态光照、动态纹理等。与此同时采集的速度与精度也在不断提高,几何计算精确达到微米,光照重建也实现了动态光场采集。在建模方法上面,综合利用当前采集设备的最新发展,新的激光扫描仪、深度相机、飞秒相机的使用,拓展了建模的手段;基于视觉、交互以及人工智能等新方法技术,提供了更便捷与智能的建模方式,例如,近年来基于机器学习的建模方法、从高层语义理解的角度探索几何造型设计方法,从而快速批量地设计出风格相似但具有不同尺寸和不同细节的模型。这些技术出现为现实环境的高保真、高效率重建提供了新的技术途径。
虚拟现实与增强现实技术都需要实时高保真地呈现虚拟环境 / 物体,提供给人逼真的视觉体验, 这是计算机渲染技术尝试解决的问题。传统图形技术已可以构造出复杂的交互虚拟场景,但表示的准确性和效率有待提高。随着应用的深入,虚拟场景的表现越来越精细,导致其复杂性迅速增长,给虚拟环境的交互处理带来了严重挑战。尽管发明了许多有效的加速处理技术,如场景简化、采样预计算以及并行分布处理等,虚拟环境感知的真实性和实时性矛盾仍是影响虚拟现实技术普及应用的瓶颈。目前,这方面的研究出现了两个新的发展趋势。一方面,面对一些特殊的应用需求,通过适当限制交互自由度,寻找低复杂度、高真实性的虚拟场景的表示和驱动方法来达到目的。另一方面,通过针对性地研发新的渲染技术,例如基于外存的大场景渲染技术、GPU 并行计算技术、后处理绘制技术、实时光线跟踪技术等,实现高保真的虚拟环境 / 物体呈现。
为了提供沉浸式虚拟体验,当前虚拟现实与增强现实技术的显示输出技术有别于传统基于显示器的显示方法。通过探索新的显示机理和方式,近年来已经发展出了高分辨率大型投影显示装置、轻量化头盔、真三维光场显示器等一批高新显示设备。近年来,虚拟现实的产业热潮也是随着 Oculus 发布消费级虚拟现实头盔而带动起来的。随后,随着HTC Vive 虚拟现实头盔、微软 Hololens 穿透式增强现实头盔、Magic Leap 光场显示头盔等一系列产品的推出与发布,以及采用全息技术的显示头盔的出现,给人们提供了新的显示与装置,大大提升了虚拟现实与增强现实的沉浸式体验。此外,在三维显示器方面,新一代真三维光场显示器,客服了传统裸眼三维显示仅有固定最佳观察点的缺陷,提供了虚拟物体光场的自然呈现,实现了连续的运动视差与双目视差。然而,在显示技术方面,虚拟环境 / 物体的逼真呈现仍然需要解决虚实一致体验与有限的计算、处理与显示带宽之间的矛盾。
在人机交互方面,传统基于语音、笔式、数据手套和三维鼠标的交互技术日益成熟,但在交互的自然性和效率方面仍存在很多问题,特别是在触觉感知交互方面。尽管许多研究者正在继续完善这些交互技术,但一些虚实融合的新型自然和谐的人机交互技术和界面迅速成为主流发展方向。新的技术力图将人们在现实生活中对物体、环境的交互动作映射为对信息空间的交互过程的用户界面,尽可能地将生活体验应用到人机交互系统中,以降低计算机技术的学习门槛,增加交互的自然性。多点触摸用户界面、基于手势的交互方法是近年来被深入研究的一种人机交互界面,这些交互技术虽然得到初步应用,但往往受限于可靠性、实时性、灵活性、准确性、方便性等因素,与人们所期望的自然、直观的人机交互技术仍然有不小的距离。
虚拟现实与增强现实技术所面向的对象是人,因此需要实现在人感知意义下的虚实环境一致体验。这也需要对人的心理与生理的层面开展感知真实研究。这其中,首先要解决的是由虚拟环境模拟带来的身体不适,通常指“虚拟现实晕动症”。导致虚拟现实晕动症的因素有很多中,首先是视觉信息(即眼睛看到的虚拟画面)与耳内前庭系统感受到的真实位置信息不匹配,从而产生眩晕感;另一个原因是计算导致视觉画面延迟,运动存在延迟滞后现象。此外每个人的瞳距不一,人眼瞳孔中心、透镜中心、画面中心三点可能并非一线,从而出现重影现象,也会带来不适感。最后, 由于虚拟场景中景深不同步也可能会产生眩晕。
目前解决晕动症的方法有多种:①生物同步反馈技术,如使用全向跑步机等在虚拟世界做出对现实反应的真实模拟;②电磁刺激技术,如使用前庭电刺激技术通过耳后电极的反馈刺激用户前庭感受器,使体验者产生强烈的虚拟环境视觉与身体位置沉浸感;③提升计算能力,如降低延迟等;④在虚拟场景中添加虚拟参照物,如虚拟鼻子, 来减少感知的不适。
虚拟现实与增强现实技术这一概念的提出可以追溯到 20 世纪 30 年代的科幻小说,第一款将概念部分转化为现实的实验室虚拟现实头盔出现于 20 世纪 60 年代,而真正进入消费级市场,引领虚拟现实产业发展的 Oculus 头盔正式发售于2016 年。在建模、渲染、显示与交互技术都获得长足发展之后,虚拟现实与增强现实技术终于步入寻常百姓的家里,开始真正影响人们的生活, 而消费市场的快速发展又会进一步促进技术的完善与发展。当前国际上著名的 IT 企业(如微软、Facebook、Google、Apple)都纷纷增加在虚拟现实与增强现实技术上的投入。市场 – 技术相互促进与发展的成果将会在未来 5 年内得以体现。在虚拟环境呈现的方式、呈现的真实性、人机交互的便捷性与准确性等方面将会取得进一步的发展。近眼光场显示头盔、基于光线跟踪的真实感呈现算法、自然手势交互、移动精准定位与位置感知等方面预期都会有较大的突破,进而将虚拟现实与增强现实创造虚拟环境的真实性进一步提升, 从而提供给人们无障碍可体验、感知舒适的虚拟与增强环境。
虚拟现实与增强现实系统的显示、交互和操控技术的重点开发国家和机构,各国专利在全球的部署情况,企业核心专利量及被引量占比、产学研合作情况见表 2.2.6、表 2.2.7、图 2.2.5 和图 2.2.6 。
《表 2.2.6》
表 2.2.6 “虚拟现实与增强现实系统的显示、交互和操控技术”工程开发前沿中核心专利的主要产出国家或地区
| 序号 | 国家 / 地区 | 公开量 | 公开量比例 | 被引频次 | 被引频次比例 | 平均被引频次 |
| 1 | USA | 34 | 75.56% | 1507 | 76.11% | 44.32 |
| 2 | Japan | 7 | 15.56% | 208 | 10.51% | 29.71 |
| 3 | Canada | 2 | 4.44% | 82 | 4.14% | 41 |
| 4 | Germany | 1 | 2.22% | 121 | 6.11% | 121 |
| 5 | South Korea | 1 | 2.22% | 62 | 3.13% | 62 |
《表 2.2.7》
表 2.2.7 “虚拟现实与增强现实系统的显示、交互和操控技术”工程开发前沿中核心专利的主要产出机构
| 序号 | 机构 | 公开量 | 公开量比例 | 被引频次 | 被引频次比例 | 平均被引频次 |
| 1 | MICT | 10 | 22.22% | 735 | 37.12% | 73.5 |
| 2 | MAGI | 7 | 15.56% | 309 | 15.61% | 44.14 |
| 3 | DAQR | 3 | 6.67% | 54 | 2.73% | 18 |
| 4 | SHIH | 3 | 6.67% | 71 | 3.59% | 23.67 |
| 5 | SONY | 3 | 6.67% | 94 | 4.75% | 31.33 |
| 6 | GOOG | 2 | 4.44% | 86 | 4.34% | 43 |
| 7 | MICR | 2 | 4.44% | 49 | 2.47% | 24.5 |
| 8 | BOSC | 1 | 2.22% | 121 | 6.11% | 121 |
| 9 | ETRI | 1 | 2.22% | 62 | 3.13% | 62 |
| 10 | EYEL | 1 | 2.22% | 15 | 0.76% | 15 |
注:MICT 表示 Microsoft Corp;MAGI 表示 Magic Leap Inc;DAQR 表示 Daqri LLC;SHIH 表示 Seiko Epson Corp;SONY 表示 Sony Corp;GOOG 表示 Google Inc;MICR 表示 Microsoft Technology Licensing LLC;BOSC 表示 Bosch Gmbh Robert; ETRI 表示 Electronics & Telecom Res Inst;EYEL 表示 Eye Labs LLC。
《图 2.2.5》
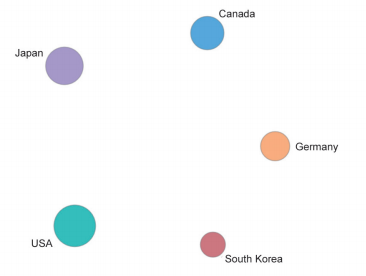
图 2.2.5 “虚拟现实与增强现实系统的显示、交互和操控技术”工程开发前沿的主要国家或地区间合作网络
《图 2.2.6》
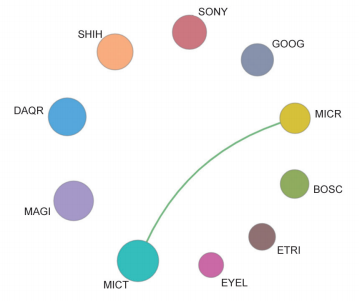
图 2.2.6 “虚拟现实与增强现实系统的显示、交互和操控技术”工程开发前沿的主要机构间合作网络
领域课题组人员
课题组组长:潘云鹤 卢 锡 城
课题组副组长:邬江兴 姜会林
院士专家:
第一组:李天初 陈良惠 龚惠兴 姜会林
周寿恒 韦 钰 刘泽金
第二组:邬江兴 段宝岩 陈志杰 刘韵洁
樊邦奎 吴伟仁
第三组:潘云鹤 卢锡城 郑南宁 李伯虎 费爱国 赵沁平 吴建平
工作组成员
文献情报专家:
杨未强 刘书雷 耿国桐 霍凝坤 屈婷婷
吴 集 杨 筱 刘宝林 陈振英 叶文莹
联络员:范桂梅
秘 书:翟自洋
执笔组成员:
王 兵 胡晓女 张 佳 杨未强 曾建林
艾 渤 程志渊 邓启文 范红旗 韩亚洪
胡晓女 黄辰林 黄育侦 金仲和 李 宝
刘 肯 刘妹琴 任沁源 谭 霜 王 锐
吴 飞 席 鹏 谢人超 杨 易 张成良
郑能干











 京公网安备 11010502051620号
京公网安备 11010502051620号




