
《1 工程研究前沿》
1 工程研究前沿
《1.1 Top 10 工程研究前沿发展态势》
1.1 Top 10 工程研究前沿发展态势
机械与运载工程领域 Top 10 工程研究热点涉及机械工程、船舶与海洋工程、航空宇航科学技术、兵器科学与技术、动力及电气设备工程与技术、交通运输工程等学科方向(见表 1.1.1)。其中:属于传统研究深化的是增减材复合制造方法、基于机器学习的故障监测与诊断、超声速燃烧室技术研究、作业型飞行机器人、高功率无线电能传输;新兴前沿包括数字孪生驱动的智能制造、吸气式高超声速飞行器、连续纤维增强复合材料增材制造、空间大型可展开天线、基于第五代移动通信(5G)的车联网与实时交通管理方法。
2014—2019 年,各前沿相关的核心论文逐年发表情况见表 1.1.2。
(1)数字孪生驱动的智能制造
数字孪生作为新兴技术,基本特征是物理实体和数字孪生模型的双向映射;在数字化设计、虚拟仿真、工业物联网等关键使能技术交叉融合的基础上,构建产品 / 工厂所对应的数字孪生模型,对数字孪生模型进行可视化、调试、体验、分析与优化,以此提升实体产品 / 工厂的性能和运行绩效。2017—2019 年,高德纳咨询公司均将数字孪生列入十大新兴技术。数字孪生驱动智能制造主要体现在两方面。一是智能产品全生命周期的数字孪生应用,在产品设计制造阶段进行虚拟测试和半实物仿真;在产品服役阶段通过工业物联网采集产品运行数据,基于数字孪生模型仿真结果进行故障预测、绩效分析与优化;在产品报废回收再利用阶段结合数字孪生模型判断哪些零件可以进行再利用和再制造。二是智能工厂全生命周期的数字孪生应用,在新工厂建设前通过数字孪生模型对生产线进行虚拟调试;在智能工厂运行期间通过数字孪生模型对工厂运行状态进行可视化、优化和故障预警;在智能工厂改造升级过程中利用数字孪生模型优化改进方
《表 1.1.1》
表 1.1.1 机械与运载工程领域 Top 10 工程研究前沿
| 序号 | 工程研究前沿 | 核心论文数 | 被引频次 | 篇均被引频次 | 平均出版年 |
| 1 | 数字孪生驱动的智能制造 | 9 | 847 | 94.11 | 2017.6 |
| 2 | 增减材复合制造方法 | 11 | 625 | 56.82 | 2015.3 |
| 3 | 吸气式高超声速飞行器 | 25 | 984 | 39.36 | 2016.6 |
| 4 | 基于机器学习的故障监测与诊断 | 41 | 2986 | 72.83 | 2017.7 |
| 5 | 连续纤维增强复合材料增材制造 | 10 | 750 | 75 | 2017.2 |
| 6 | 超声速燃烧室技术研究 | 28 | 640 | 22.86 | 2016.8 |
| 7 | 空间大型可展开天线 | 11 | 215 | 19.55 | 2016.7 |
| 8 | 基于 5G 的车联网与实时交通管理方法 | 17 | 1225 | 72.06 | 2017.1 |
| 9 | 作业型飞行机器人 | 46 | 1221 | 26.54 | 2015.2 |
| 10 | 高功率无线电能传输 | 20 | 1600 | 80 | 2016.8 |
《表 1.1.2》
表 1.1.2 机械与运载工程领域 Top 10 工程研究前沿逐年核心论文发表数
| 序号 | 工程研究前沿 | 2014 年 | 2015 年 | 2016 年 | 2017 年 | 2018 年 | 2019 年 |
| 1 | 数字孪生驱动的智能制造 | 0 | 0 | 1 | 3 | 4 | 1 |
| 2 | 增减材复合制造方法 | 2 | 4 | 5 | 0 | 0 | 0 |
| 3 | 吸气式高超声速飞行器 | 1 | 6 | 4 | 7 | 4 | 3 |
| 4 | 基于机器学习的故障监测与诊断 | 0 | 1 | 5 | 10 | 14 | 11 |
| 5 | 连续纤维增强复合材料增材制造 | 0 | 0 | 2 | 5 | 2 | 1 |
| 6 | 超声速燃烧室技术研究 | 2 | 4 | 4 | 8 | 9 | 1 |
| 7 | 空间大型可展开天线 | 1 | 0 | 3 | 5 | 1 | 1 |
| 8 | 基于 5G 的车联网与实时交通管理方法 | 2 | 2 | 2 | 3 | 3 | 5 |
| 9 | 作业型飞行机器人 | 18 | 14 | 6 | 5 | 3 | 0 |
| 10 | 高功率无线电能传输 | 0 | 5 | 2 | 6 | 5 | 2 |
案。相关研究热点有:高保真度数字孪生模型, 三维交互式实时渲染,贯穿产品全生命周期的数字主线构建,数字孪生模型的多学科仿真与优化, 应用人工智能(AI)和大数据技术对工业物联网开展数据实时分析以及与数字孪生模型进行实时映射等。
(2) 增减材复合制造方法
增减材复合制造方法运用逐层堆叠的增材制造和适时的减材加工,实现零件在同一台机床上完成“增材堆积 – 减材精整”的连续或同步制造过程。方法的实质是将减材制造融入增材制造的成形过程中,旨在提高增材制造零件的精度和质量,直接获得结构复杂、组织致密、形状精度和表面质量高的零件,满足工业高精尖领域对精密零件的性能要求。相关研究主要分为三方面:一是增减材复合制造方法与装备,研究不同能量源和材料的增减材复合制造方法,开发多轴数控机床、增材制造机构、送料机构,研制增减材复合制造装备;二是增减材复合制造软件,开发重点是零件特征识别分层数据处理、增减材复合制造路径生成与规划、增减材加工工艺模拟;三是增减材复合制造工艺,根据成形材料特点和性能要求,优化增材和减材制造工艺,达到控形控性的目的。增减材复合制造工艺引入在线检测技术,可实现制造过程实时检测反馈,发现成形过程中产生的缺陷,动态调整成形过程中的复合工艺参数。利用减材技术实时去除增材形成的缺陷,是提高增减材复合制造零件性能和精度的有效手段, 成为当前研究热点。
(3) 吸气式高超声速飞行器
吸气式高超声速飞行器飞行马赫数不小于 5, 以吸气式超燃冲压发动机或组合发动机为动力, 可从地面零速起飞直到入轨,通常分为临近空间飞行器和空天飞行器。临近空间飞行器细分为高超声速巡航飞行器、高超声速跨域机动飞行器、高超声速飞机;空天飞行器指可自由进出空间的可重复使用航天运载器。吸气式高超声速飞行器具有速度快、航程远、性能优异等独特优势,将对人类社会发展和未来军事对抗模式产生重要影响。相关技术体系成为衡量一个国家航空航天领域发展程度的标志,研究集中在超燃冲压发动机及其组合循环动力技术、高超声速热防护结构与材料技术、飞行器/ 推进一体化气动外形设计技术、高超声速飞行器导航制导与控制技术、高超声速地面试验与飞行演示验证技术等。航天大国都将吸气式高超声速飞行器技术作为未来航空航天领域发展的重要方向,力争占据未来航空航天技术发展的制高点。
(4) 基于机器学习的故障监测与诊断
随着大数据挖掘和 AI 技术的发展,计算机网络规模趋于复杂,生成的过程数据越发庞大,出现了新的数据分析需求。基于机器学习的智能故障诊断方法普到工业界和产业界的遍受关注。当前主流的智能诊断方法分为机器学习和深度学习:前者有贝叶斯网络、人工神经网络、支持向量机、隐马尔可夫模型等,后者有卷积神经网络、循环神经网络、自动编码机、对抗学习网络、脉冲神经网络等,均具有强大的数据特征自动提取功能,可进行端对端的故障诊断。传统机器学习普遍存在泛化能力和精度有限、复杂多工况多分类场景下面临性能瓶颈等问题;相比之下,深度学习因其大数据适应能力强、覆盖范围广、适应性和移植性好而成为研究热点。第一代神经网络(以人工神经网络为代表)存在学习时间长、网络规模大等不足,第二代神经网络(以卷积神经网络为代表)在故障监测与诊断方面取得了良好的应用效果,但计算和存储需求偏大。为适应复杂工况智能诊断需求,同时具有高效学习、低存储和低成本的基本特征,第三代神经网络(如脉冲神经网络)利用随时间变化的脉冲序列传递特征信息,脉冲编码效率较高,也与智能故障诊断发展方向趋同。
(5) 连续纤维增强复合材料增材制造
连续纤维增强复合材料作为一种先进高性能轻质材料,长期以来存在制备过程周期长、成本高、工艺复杂等问题,严重制约了应用范围和推广进度。增材制造具有工艺简单、加工成本低、原材料利用率高、无模自由成形、绿色环保等优点,理论上可制备具有任意复杂几何构型的结构件。两方面的技术融合具有重大前景,发展的制备工艺有选区激光烧结、熔融沉积制造、分层实体制造、立体光刻技术;其中熔融沉积制造因工艺成本低、设备简单、易于操作等特性,应用较为广泛。尽管针对打印装备、制备工艺、材料改性等已开展了大量的研发工作,但最终成型件的刚度、强度、表面质量、致密性等方面仍存在缺陷,尚不能完全满足工程应用需求。对标大规模工业化应用,未来重点发展方向有: 具有特殊性能的连续纤维制备与开发,增材制造成型技术与连续纤维增强复合材料成型融合机理,连续纤维增强复合材料增材制造标准评价体系,适用面更宽泛的新型增材制造工艺。
(6) 超声速燃烧室技术研究
随着高超声速技术的发展,超燃冲压发动备受工程界关注。在高超声速来流条件下,考虑到总压损失等一系列性能指标,气流经过进气道压缩后进入燃烧室时仍为超声速,出现了超声速燃烧现象。燃烧室要在数毫秒周期内完成燃料喷射、雾化、蒸发、掺混、点火、稳定燃烧等过程,还要实现高效能量转化和较小压力损失,设计难度极大。相关研究方向有:流道整体优化设计技术、燃料喷注与雾化技术、可靠点火和火焰稳定技术、高效低阻燃烧组织技术、可控燃烧技术、燃烧过程高精度测量等。目前,航天强国在工程层面上陆续突破了超声速燃烧技术,具备了满足一定工程应用推力需求的超燃冲压发动机和双模态冲压发动机的研制能力,但仍面临较多问题,如宽域燃烧、低压燃烧、多模态燃烧、更高马赫数燃烧、大尺度燃烧、高精度数值模拟等。这些问题的解决事关发动机性能提升和应用拓展,将是超声速燃烧技术方向的持续关注重点。大力开展超声速燃烧相关基础科学研究,在火焰生成及传播机理、液态燃料蒸发雾化机理、不稳定燃烧、燃烧模式及其转化等方面取得进一步突破。
(7) 空间大型可展开天线
星载天线应用于空间和对地无线通信、电子侦察、导航、遥感、深空探测及射电天文,为了具备多波段、大容量、高功率能力以实现通信连接及网络服务,通信卫星需配备大口径星载天线。受限于运载火箭整流罩尺寸与发射费用,星载天线要求轻质且收拢体积小,因而大口径星载天线应具备可展开特性,常用的有反射面天线、阵列天线、微电子机械天线。反射面天线是各种卫星使用最多的一类, 可作为超高频、微波乃至毫米波波段的通信卫星天线,根据反射面结构形式又可分为刚性反射面天线、充气反射面天线、网状反射面天线、薄膜反射面天线。阵列天线具有更多的设计自由度,如线阵、平面阵、共形阵、相共阵等,能较好地实现高增益、窄波束、多目标、空分多址、自主控制等功能。微电子机械天线是一种结合了微机电系统技术的新型低成本、高性能天线,分为微电子机械相控阵天线、微电子机械可重构天线、微带栅格天线、微电子机械多频段天线等。近年来,空间大型可展开天线技术的研究集中在柔性结构和展开机构设计、反射面形面分析与调整、电磁性能分析与可靠性分析等方面,相关基础理论研究涉及机电热综合优化设计理论与方法、波束赋形反射面天线设计、性能测试、网状天线无源交调、新材料应用等。实现高频通信的大口径高精度天线是下一代可展开天线的发展方向,技术攻关重点包括可展开构架式反射面天线、充气式可展开反射面天线、空间组装大型天线、智能阵列天线等。
(8) 基于 5G 的车联网与实时交通管理方法
5G 具有大带宽高速率、低时延高可靠和海量连接等特性,推动蜂窝车联网(C-V2X)持续演进。5G 车联网业务以智慧道路监测、自动驾驶、远程驾驶、编队行驶等业务为主,在 C-V2X 的基础上融合了蜂窝通信和直连通信,使“人 – 车– 路– 云” 等交通参与要素有机地联系,实现交通网、信息网、能源网“三网合一”,形成随时通信、实时监控、及时决策的智能网络。“智能 + 网联”是未来车联网发展的基本路线,通过车– 车、车 – 路、车 – 人、车 – 网的信息交互和共享来实现车辆和基础设施之间智能协同与配合;构建智能路况综合感知、动态协同交通控制等能力,旨在优化系统资源利用、提高道路交通安全、缓解交通拥堵;未来朝着更加安全、协同、智能、绿色的交通系统方向演进。C-V2X 将与超大规模多输入多输出、毫米波通信、移动边缘计算、雷达、基于 5G 增强的高精度定位等技术结合;突破 5G 车联网信息安全技术来确保交通行车安全、隐私和数据安全,通过全域感知、分级云控, 建设地面交通在云端的数字孪生映射,利用 AI 技术实现快速高效的智慧交通实时管理。
(9) 作业型飞行机器人
作业型飞行机器人由飞行器与作业装置(如机械臂)共同组成,是一种具有主动作业能力的新型机器人;由螺旋桨提供升力,机动灵活,操控性强。作业型飞行机器人系统具有诸多优势:在飞行过程中快速捕捉空中或地面目标,迅速到达地面机器人无法进入的复杂环境中(如地震、火山喷发等灾害现场)执行精细作业任务,多个作业型飞行机器人进行协同搬运、装配大负载,综合飞行能力和作业机构灵活性来拓展实现新概念多栖移动平台。由于作业装置与飞行器之间的强耦合性、作业装置与外部目标的接触对飞行器自身运动产生影响, 作业型飞行机器人的应用依然面临一些问题,如欠驱动、多变量、强耦合的复杂非线性因素对飞行控制的影响。近年来,有关作业型飞行机器人的系统设计、视觉引导、运动控制获得较多关注, 但目前还处于起步阶段,耦合效应建模与分析、高性能飞行与作业控制、运动 / 状态规划、实验系统构建等方面均待深入开展研究。
(10) 高功率无线电能传输
无线电能传输(WPT)是一种综合利用电力电子与控制技术实现电能从电源到负载的非电气接触电能传递技术,重点发展方向是磁耦合无线电能传输,利用发射 / 接收线圈之间的高频交变耦合磁场来实现电能传输,具有安全、可靠、灵活、非接触等特点。2013 年,WPT 技术被世界经济论坛评为“对世界影响最大、最有可能为全球面临的挑战提供答案的十大新兴技术”之一。磁耦合无线电能传输技术为诸多领域提供新的供电解决方案,如电动汽车充电、植入式医疗设备供能、水下传能、高压电气设备供能等。相关研究方向主要有:WPT 系统最大功率点跟踪、传输距离及传输效率分析、多线圈耦合方式优化与控制、多拾取动态无线电能传输系统控制方法、磁耦合 WPT 系统异物检测技术等。相关发展趋势包括:提高无线传能的功率,提高供能系统的功率密度,提高供能效率,提高传输距离, 优化系统结构与控制方法,提高供能的可靠性、稳定性、鲁棒性。
《1.2 Top 3 工程研究前沿重点解读》
1.2 Top 3 工程研究前沿重点解读
1.2.1 数字孪生驱动的智能制造
数字孪生技术的应用源于美国国家航空航天局(NASA)在航空产品的设计、制造、测试与服役中的应用,例如对“好奇号”火星车进行远程仿真与操控。在数字化设计技术和虚拟仿真技术发展和集成应用的过程中,产生了数字原型、数字样机、虚拟样机、全功能虚拟样机等技术,主要用于实现复杂产品的运动仿真、装配仿真和性能仿真。随着传感器技术和无线通信技术的发展,工业物联网开始应用于高价值工业设备的运行监控和维修维护。随着学术界的研究,通用电气公司、西门子集团等企业应用的示范下,数字孪生技术开始受到广泛关注,基于工业物联网实现了数字孪生模型与物理模型之间的虚实映射。
数字孪生已经成为智能制造领域的应用热点与研究前沿。智能产品数字孪生应用的价值在于,通过虚实映射来持续改进产品的性能,为客户提供更好的体验,提高产品运行的安全性、可靠性、稳定性,进而提升产品的市场竞争力。智能工厂数字孪生应用的价值主要体现为:构建透明工厂,提升工厂的运营管理水平,提高设备运转率,降低能耗, 促进安全生产。数字孪生技术的典型应用场景有: 机电软一体化复杂产品研发,智能产品运行监控和智能运维,智能工厂运行实时模拟和远程监控,生产线虚拟调试,数字营销等。目前,数字孪生技术的应用还处于初步阶段,主要研究方向包括:构建数字孪生技术应用的一体化集成平台;研发能够对轻量化三维模型进行交互式和实时三维渲染的底层平台,支持虚拟现实 / 增强现实应用;打通贯穿产品全生命周期的数字主线,串起各个阶段的数字孪生模型,确保在发生变更时各个数字孪生模型的一致性;对智能产品和智能工厂运行进行实时监控的三维可视化技术;对智能产品进行系统仿真和结构、流体、电磁等多学科仿真,为支持多学科仿真计算同步而发展的降阶处理技术;基于 AI 和工业大数据技术对传感器和物联网数据进行实时分析;基于工业物联网平台对来自边缘端的物联网数据、来自云端的数字孪生模型仿真结果数据进行分析比对的技术等。
“数字孪生驱动的智能制造”工程研究前沿中, 核心论文发表量靠前的国家是中国、新加坡,篇均被引频次靠前的国家是美国、澳大利亚、法国、德国(见表 1.2.1)。在发文量 Top 7 国家中,中国和新加坡合作较多(见图 1.2.1)。核心论文发文量方面,北京航空航天大学、新加坡国立大学具有优势,篇均被引频次排在前列的机构是爱荷华大学、新南威尔士大学、埃尔朗根 – 纽伦堡大学、巴黎萨克雷大学(见表 1.2.2)。在发文量 Top 8 机构中, 北京航空航天大学和新加坡国立大学合作较多(见图 1.2.2)。施引核心论文的主要产出国家是中国、美国、德国(见表 1.2.3),施引核心论文的主要产出机构是北京航空航天大学、查尔姆斯理工大学、武汉理工大学(见表 1.2.4)。
1.2.2 增减材复合制造方法
增材制造采用逐层制造并叠加原理,理论上可以成形任意复杂结构,而不受传统加工中刀具、模具、夹具等多样复杂条件问题的约束,突破了传统加工方法在整体成形复杂零件时面临的瓶颈问题。德国工业 4.0、美国先进制造、中国制造 2025、英国工业 2050、日本振兴战略等国家发展战略均将增材制造列为制造业未来发展的重要方向。然而,
《表 1.2.1》
表 1.2.1 “数字孪生驱动的智能制造”工程研究前沿中核心论文的主要产出国家
| 序号 | 国家 | 核心论文数 | 论文比例 | 被引频次 | 篇均被引频次 | 平均出版年 |
| 1 | 中国 | 7 | 77.78% | 630 | 90 | 2017.7 |
| 2 | 新加坡 | 3 | 33.33% | 88 | 29.33 | 2017 |
| 3 | 澳大利亚 | 1 | 11.11% | 148 | 148 | 2018 |
| 4 | 美国 | 1 | 11.11% | 148 | 148 | 2018 |
| 5 | 法国 | 1 | 11.11% | 134 | 134 | 2017 |
| 6 | 德国 | 1 | 11.11% | 134 | 134 | 2017 |
| 7 | 瑞典 | 1 | 11.11% | 83 | 83 | 2017 |
《表 1.2.2》
表 1.2.2 “数字孪生驱动的智能制造”工程研究前沿中核心论文的主要产出机构
| 序号 | 机构 | 核心论文数 | 论文比例 | 被引频次 | 篇均被引频次 | 平均出版年 |
| 1 | 北京航空航天大学 | 6 | 66.67% | 575 | 95.83 | 2017.7 |
| 2 | 新加坡国立大学 | 3 | 33.33% | 88 | 29.33 | 2017 |
| 3 | 爱荷华大学 | 1 | 11.11% | 148 | 148 | 2018 |
| 4 | 新南威尔士大学 | 1 | 11.11% | 148 | 148 | 2018 |
| 5 | 埃尔朗根 – 纽伦堡大学 | 1 | 11.11% | 134 | 134 | 2017 |
| 6 | 巴黎萨克雷大学 | 1 | 11.11% | 134 | 134 | 2017 |
| 7 | 查尔姆斯理工大学 | 1 | 11.11% | 83 | 83 | 2017 |
| 8 | 北京理工大学 | 1 | 11.11% | 55 | 55 | 2018 |
《图 1.2.1》
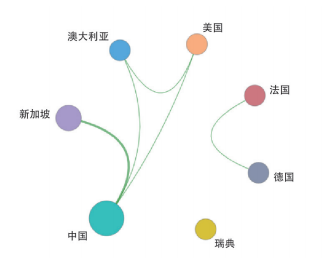
图 1.2.1 “数字孪生驱动的智能制造”工程研究前沿主要国家间的合作网络
与传统机加工相比,增材制造零件存在几何精度和表面质量差、内部缺陷多等突出问题。增减材复合制造技术运用逐层堆叠的增材制造以及适时的减材加工,实现零件在同一台机床上完成“增材堆积-减材精整”的连续或同步制造过程,直接获得结构复杂、组织致密、形状精度和表面质量高的零件,满足工业高精尖领域对精密零件的性能要求。该技术不但具有增材制造的成形零件复杂、材料利用率高等优点,而且兼顾了减材加工高质量与高精度的优势,因此成为目前全球制造业关注的重点与焦点。
当前相关研究主要有方法与装备、软件、工艺三方面。在增减材复合制造方法与装备方面,研究不同能量源和材料的增减材复合制造方法,开发多轴数控机床、增材制造机构、送料机构等系统,进而研制增减材复合制造装备。在增减材复合制造软件方面,开发零件特征识别分层数据处理、增减材复合制造路径生成与规划、增减材加工工艺模拟等软件。在增减材复合制造工艺方面,根据成形材料
《图 1.2.2》
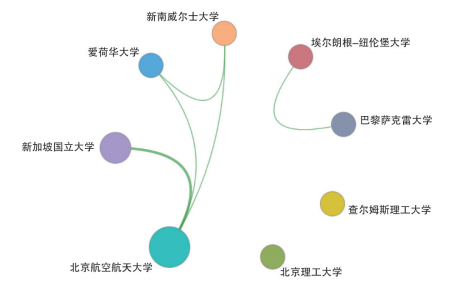
图 1.2.2 “数字孪生驱动的智能制造”工程研究前沿主要机构间的合作网络
《表 1.2.3》
表 1.2.3 “数字孪生驱动的智能制造”工程研究前沿中施引核心论文的主要产出国家
| 序号 | 国家 | 施引核心论文数 | 施引核心论文比例 | 平均施引年 |
| 1 | 中国 | 238 | 40.07% | 2018.9 |
| 2 | 美国 | 78 | 13.13% | 2019.1 |
| 3 | 德国 | 47 | 7.91% | 2019 |
| 4 | 英国 | 46 | 7.74% | 2018.9 |
| 5 | 瑞典 | 39 | 6.57% | 2018.8 |
| 6 | 意大利 | 33 | 5.56% | 2019.1 |
| 7 | 法国 | 33 | 5.56% | 2018.6 |
| 8 | 新加坡 | 24 | 4.04% | 2019 |
| 9 | 韩国 | 23 | 3.87% | 2018.9 |
| 10 | 印度 | 19 | 3.20% | 2018.7 |
《表 1.2.4》
表 1.2.4 “数字孪生驱动的智能制造”工程研究前沿中施引核心论文的主要产出机构
| 序号 | 机构 | 施引核心论文数 | 施引核心论文比例 | 平均施引年 |
| 1 | 北京航空航天大学 | 45 | 23.32% | 2018.6 |
| 2 | 查尔姆斯理工大学 | 24 | 12.44% | 2018.8 |
| 3 | 武汉理工大学 | 18 | 9.33% | 2018.2 |
| 4 | 广东工业大学 | 16 | 8.29% | 2018.6 |
| 5 | 南洋理工大学 | 15 | 7.77% | 2019.3 |
| 6 | 上海交通大学 | 14 | 7.25% | 2019 |
| 7 | 西北工业大学 | 14 | 7.25% | 2018.9 |
| 8 | 香港大学 | 14 | 7.25% | 2019.4 |
| 9 | 香港理工大学 | 13 | 6.74% | 2019.4 |
| 10 | 浙江大学 | 10 | 5.18% | 2018.9 |
与性能要求,对增材和减材制造工艺进行优化,最终达到控形控性的目的。增材过程易产生裂纹、气孔等内部缺陷,严重影响零件的拉伸强度、疲劳强度等力学性能,在要求苛刻的航空大型金属构件制造领域尤为明显。为此,在增减材复合制造工艺中引入在线测控技术,实现制造过程实时检测反馈, 及时发现成形过程中产生的缺陷和尺寸偏差,对成形过程中复合工艺参数进行动态调整并形成闭环控制,是提高增减材复合制造零件性能和精度的新的有效手段,成为增减材复合制造的研究前沿和发展趋势。
“增减材复合制造方法”工程研究前沿中,核心论文发表量排在前列的国家是美国、英国,篇均被引频次排在前列的国家是韩国、英国、芬兰、法国(见表 1.2.5)。在发文量 Top 8 国家中,美国和韩国、美国与中国合作较多(见图 1.2.3)。核心论文发文量排在前列的机构是巴斯大学、扬斯敦州立大学;篇均被引频次最高的机构分别为美国劳伦斯伯克利国家实验室、首尔大学、华盛顿大学(见表 1.2.6)。在发文机构方面,首尔大学、美国劳伦斯伯克利国家实验室、华盛顿大学合作较多,坦佩雷理工大学、格勒诺布尔 – 阿尔卑斯大学和阿尔托大学合作较多(见图 1.2.4)。施引核心论文发文量排在前 3 位的国家是美国、中国、德国(见表1.2.7)。施引核心论文的主要产出机构是都灵理工大学、首尔大学、大连理工大学(见表 1.2.8)。
《表 1.2.5》
表 1.2.5 “增减材复合制造方法”工程研究前沿中核心论文的主要产出国家
| 序号 | 国家 | 核心论文数 | 论文比例 | 被引频次 | 篇均被引频次 | 平均出版年 |
| 1 | 美国 | 6 | 54.55% | 318 | 53 | 2015.2 |
| 2 | 英国 | 2 | 18.18% | 189 | 94.5 | 2015.5 |
| 3 | 韩国 | 1 | 9.09% | 133 | 133 | 2014 |
| 4 | 芬兰 | 1 | 9.09% | 56 | 56 | 2016 |
| 5 | 法国 | 1 | 9.09% | 56 | 56 | 2016 |
| 6 | 比利时 | 1 | 9.09% | 37 | 37 | 2014 |
| 7 | 中国 | 1 | 9.09% | 25 | 25 | 2016 |
| 8 | 德国 | 1 | 9.09% | 25 | 25 | 2016 |
《表 1.2.6》
表 1.2.6 “增减材复合制造方法”工程研究前沿中核心论文的主要产出机构
| 序号 | 机构 | 核心论文数 | 论文比例 | 被引频次 | 篇均被引频次 | 平均出版年 |
| 1 | 巴斯大学 | 2 | 18.18% | 189 | 94.5 | 2015.5 |
| 2 | 扬斯敦州立大学 | 2 | 18.18% | 52 | 26 | 2015.5 |
| 3 | 美国劳伦斯伯克利国家实验室 | 1 | 9.09% | 133 | 133 | 2014 |
| 4 | 首尔大学 | 1 | 9.09% | 133 | 133 | 2014 |
| 5 | 华盛顿大学 | 1 | 9.09% | 133 | 133 | 2014 |
| 6 | 加利福尼亚大学伯克利分校 | 1 | 9.09% | 97 | 97 | 2015 |
| 7 | 阿尔托大学 | 1 | 9.09% | 56 | 56 | 2016 |
| 8 | 坦佩雷理工大学 | 1 | 9.09% | 56 | 56 | 2016 |
| 9 | 格勒诺布尔 – 阿尔卑斯大学 | 1 | 9.09% | 56 | 56 | 2016 |
| 10 | 鲁汶大学 | 1 | 9.09% | 37 | 37 | 2014 |
《图 1.2.3》
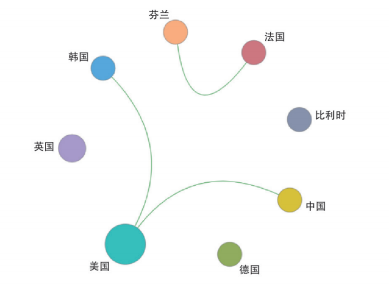
图 1.2.3 “增减材复合制造方法”工程研究前沿主要国家间的合作网络
《图 1.2.4》
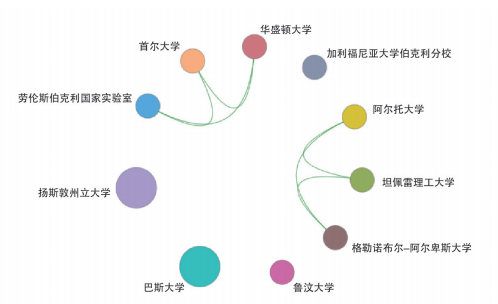
图 1.2.4 “增减材复合制造方法”工程研究前沿主要机构间的合作网络
《表 1.2.7》
表 1.2.7 “增减材复合制造方法”工程研究前沿中施引核心论文的主要产出国家
| 序号 | 国家 | 施引核心论文数 | 施引核心论文比例 | 平均施引年 |
| 1 | 美国 | 99 | 22.45% | 2018.2 |
| 2 | 中国 | 75 | 17.01% | 2018.6 |
| 3 | 德国 | 53 | 12.02% | 2018.2 |
| 4 | 意大利 | 46 | 10.43% | 2018.2 |
| 5 | 英国 | 43 | 9.75% | 2017.9 |
| 6 | 韩国 | 39 | 8.84% | 2016.8 |
| 7 | 法国 | 28 | 6.35% | 2018.1 |
| 8 | 西班牙 | 18 | 4.08% | 2018.6 |
| 9 | 加拿大 | 18 | 4.08% | 2018.7 |
| 10 | 荷兰 | 11 | 2.49% | 2018.9 |
《表 1.2.8》
表 1.2.8 “增减材复合制造方法”工程研究前沿中施引核心论文的主要产出机构
| 序号 | 机构 | 施引核心论文数 | 施引核心论文比例 | 平均施引年 |
| 1 | 都灵理工大学 | 16 | 14.29% | 2018.1 |
| 2 | 首尔大学 | 15 | 13.39% | 2016.4 |
| 3 | 大连理工大学 | 12 | 10.71% | 2018.3 |
| 4 | 伊利诺伊大学 | 9 | 8.04% | 2017.3 |
| 5 | 浙江大学 | 9 | 8.04% | 2018.6 |
| 6 | 诺丁汉大学 | 9 | 8.04% | 2017.3 |
| 7 | 哈尔滨工业大学 | 9 | 8.04% | 2018.8 |
| 8 | 巴勒莫大学 | 9 | 8.04% | 2017.7 |
| 9 | 格勒诺布尔 – 阿尔卑斯大学 | 8 | 7.14% | 2017.6 |
| 10 | 密西西比州立大学 | 8 | 7.14% | 2018.6 |
1.2.3 吸气式高超声速飞行器
吸气式高超声速飞行器概念早于航天飞机。美国针对全球快速抵达的应用目标,发展了多型吸气式高超声速飞行器,如 X-30、X-43A/B/C、SR- 72、X-51A 等。2004 年 NASA 完成 X-43A 第 2 次
飞行试验,首次实现 Ma10 吸气式飞行器关键技术验证。2010 年以来,美国启动了“高超声速吸气式武器概念”项目,作为 X-51A 的延续,旨在发展飞行速度为 Ma5~6、射程约为 1000 km、能适应轰炸机内埋和战斗机外挂的战术级吸气式高超声速巡航导弹。此外,俄罗斯优先研制和发展高超声速武器,2016 年试射的“锆石”高超声速反舰巡航导弹飞行速度为 Ma6~8;提出了高超声速隐身战略轰炸机概念方案,采用组合动力,飞行速度超过 Ma5。
鉴于空天飞机研制难度极大、短期内较难实现应用,目前国际上针对吸气式高超声速飞行器的技术突破主要集中在以临近空间飞行器为主的武器应用方面。随着大国间竞争的对抗性上升,高超声速导弹这类兼具高度战术实用与战略威慑的先进武器正引发了全球高度关注,并扩散到包括攻防两端能力建设、潜在军控层面在内的全方位博弈。从技术发展来看,一次性使用的吸气式高超声速导弹技术已经获得突破,预计在 2023—2025 年迎来井喷式部署列装。为进一步拓展应用范围,后续应重点关注飞行器总体设计、高超声速冲压及组合推进、机体 / 推进一体化设计、先进结构与热防护材料、高动态快响应飞行控制等。
“吸气式高超声速飞行器”工程研究前沿中, 核心论文发表量排在前列的国家是中国、加拿大、英国,篇均被引频次排在前列的国家是中国、加拿大、英国(见表 1.2.9)。在发文量排名靠前国家中, 中国和加拿大合作较多(见图 1.2.5)。核心论文发文量排在前列的机构是中国人民解放军空军工程大学、哈尔滨工业大学、西北工业大学。篇均被引频次排在前列的机构是西北工业大学、天津大学、清华大学、北京科技大学(见表 1.2.10)。在发文量 Top 10 机构中,中国人民解放军空军工程大学和西北工业大学、哈尔滨工业大学和滑铁卢大学合作较多(见图 1.2.6)。施引核心论文发文量排在前 3 位的国家是中国、加拿大和美国(见表 1.2.11)。施引核心论文的主要产出机构是西北工业大学、哈尔滨工业大学、中国人民解放军空军工程大学(见表 1.2.12)。
《表 1.2.9》
表 1.2.9 “吸气式高超声速飞行器”工程研究前沿中核心论文的主要产出国家
| 序号 | 国家 | 核心论文数 | 论文比例 | 被引频次 | 篇均被引频次 | 平均出版年 |
| 1 | 中国 | 25 | 100.00% | 984 | 39.36 | 2016.6 |
| 2 | 加拿大 | 2 | 8.00% | 42 | 21 | 2018 |
| 3 | 英国 | 1 | 4.00% | 19 | 19 | 2017 |
《表 1.2.10》
表 1.2.10 “吸气式高超声速飞行器”工程研究前沿中核心论文的主要产出机构
| 序号 | 机构 | 核心论文数 | 论文比例 | 被引频次 | 篇均被引频次 | 平均出版年 |
| 1 | 中国人民解放军空军工程大学 | 8 | 32.00% | 186 | 23.25 | 2017.1 |
| 2 | 哈尔滨工业大学 | 7 | 28.00% | 221 | 31.57 | 2017.3 |
| 3 | 西北工业大学 | 5 | 20.00% | 310 | 62 | 2017.2 |
| 4 | 天津大学 | 3 | 12.00% | 159 | 53 | 2015.3 |
| 5 | 北京航空航天大学 | 3 | 12.00% | 112 | 37.33 | 2015.7 |
| 6 | 滑铁卢大学 | 2 | 8.00% | 42 | 21 | 2018 |
| 7 | 清华大学 | 1 | 4.00% | 43 | 43 | 2019 |
| 8 | 北京科技大学 | 1 | 4.00% | 43 | 43 | 2019 |
| 9 | 中国航天科技集团有限公司 | 1 | 4.00% | 41 | 41 | 2015 |
| 10 | 北京机电工程研究所 | 1 | 4.00% | 37 | 37 | 2015 |
《图 1.2.5》
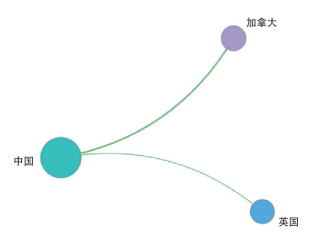
图 1.2.5 “吸气式高超声速飞行器”工程研究前沿主要国家间的合作网络
《2 工程开发前沿》
2 工程开发前沿
《2.1 Top 10 工程开发前沿发展态势》
2.1 Top 10 工程开发前沿发展态势
机械与运载工程领域的 Top 10 工程开发前沿涉及机械工程、船舶与海洋工程、航空宇航科学技术、兵器科学与技术、动力及电气设备工程与技术、交通运输工程等学科方向(见表 2.1.1)。其中,属于传统研究较深入的有基于大数据的智能制造系统生产调度技术、复杂曲面超精密加工技术、可穿戴多功能集成传感器开发、仿生软体机器人开发、高超声速飞行器热防护技术、有人机 / 无人机协同控制技术、智能电网运行与调度技术;新兴前沿包括基于 5G 技术的无人驾驶系统开发、水下无人航行器及其舰载技术、柔性电子制造技术。各个开发
《图 1.2.6》
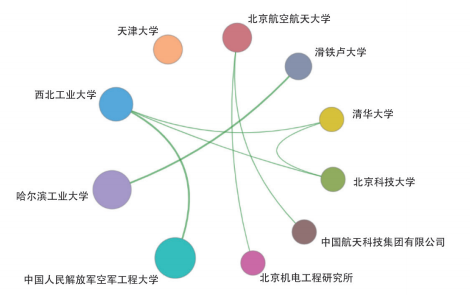
图 1.2.6 “吸气式高超声速飞行器”工程研究前沿主要机构间的合作网络
《表 1.2.11》
表 1.2.11 “吸气式高超声速飞行器”工程研究前沿中施引核心论文的主要产出国家
| 序号 | 国家 | 施引核心论文数 | 施引核心论文比例 | 平均施引年 |
| 1 | 中国 | 502 | 83.25% | 2018.1 |
| 2 | 加拿大 | 26 | 4.31% | 2017.9 |
| 3 | 美国 | 22 | 3.65% | 2018.1 |
| 4 | 英国 | 16 | 2.65% | 2017.7 |
| 5 | 新加坡 | 10 | 1.66% | 2017.2 |
| 6 | 伊朗 | 7 | 1.16% | 2018.1 |
| 7 | 印度 | 5 | 0.83% | 2018.4 |
| 8 | 意大利 | 4 | 0.66% | 2018 |
| 9 | 法国 | 4 | 0.66% | 2018.5 |
| 10 | 澳大利亚 | 4 | 0.66% | 2018.2 |
《表 1.2.12》
表 1.2.12 “吸气式高超声速飞行器”工程研究前沿中施引核心论文的主要产出机构
| 序号 | 机构 | 施引核心论文数 | 施引核心论文比例 | 平均施引年 |
| 1 | 西北工业大学 | 87 | 20.81% | 2018 |
| 2 | 哈尔滨工业大学 | 60 | 14.35% | 2018.3 |
| 3 | 中国人民解放军空军工程大学 | 49 | 11.72% | 2017.7 |
| 4 | 南京航空航天大学 | 48 | 11.48% | 2018.2 |
| 5 | 北京航空航天大学 | 46 | 11.00% | 2018.3 |
| 6 | 天津大学 | 32 | 7.66% | 2017.6 |
| 7 | 中国科学院 | 29 | 6.94% | 2017.7 |
| 8 | 中国科学院大学 | 19 | 4.55% | 2018.1 |
| 9 | 康考迪亚大学 | 18 | 4.31% | 2017.9 |
| 10 | 中国人民解放军国防科技大学 | 15 | 3.59% | 2018 |
前沿涉及的核心专利 2014—2019 年公开情况见表2.1.2,基于 5G 技术的无人驾驶系统开发、水下无人航行器及其舰载技术是近年来专利公开量增速最显著的方向。
(1)基于 5G 技术的无人驾驶系统开发
无人驾驶是集环境感知、决策规划和自动控制为一体的智能化技术,操作对象包括汽车、飞行器、舰船或其他形态装置。“网联化 + 智能化” 的技术融合与产业发展,是实现无人驾驶的必经之路。5G 因其高速率、低时延、精确测距和传感能力,已成为网联化和智能化发展的关键技术。
当前主流的自动驾驶技术依赖个体独立的感知能力,需搭载昂贵的摄像头、激光雷达、毫米波雷达、超声传感器、惯性导航 / 卫星导航等传感器; 仅能进行视距范围的感知,在恶劣天气和光线急剧变化情况下难以稳健感知,时间和空间同步存在困难。无人驾驶面临复杂计算任务,而车载计算平台价格昂贵、处理能力受限、难以规模量产。第四代移动通信(4G)能力有限,无法为高清地图、虚拟现实 / 增强现实应用提供足够的数据速率支持,难以满足道路安全对低时延和高可靠的要求。5G 与无人驾驶系统相结合自然成为无人驾驶领域
《表 2.1.1》
表 2.1.1 机械与运载工程领域 Top 10 工程开发前沿
| 序号 | 工程开发前沿 | 公开量 | 引用量 | 平均被引数 | 平均公开年 |
| 1 | 基于 5G 技术的无人驾驶系统开发 | 137 | 106 | 0.77 | 2018.6 |
| 2 | 水下无人航行器及其舰载技术 | 536 | 2413 | 4.5 | 2016.6 |
| 3 | 柔性电子制造技术 | 671 | 5047 | 7.52 | 2016 |
| 4 | 基于大数据的智能制造系统生产调度技术 | 26 | 24 | 0.92 | 2018.2 |
| 5 | 复杂曲面超精密加工技术 | 76 | 259 | 3.41 | 2016.2 |
| 6 | 可穿戴多功能集成传感器开发 | 119 | 487 | 4.09 | 2017.1 |
| 7 | 仿生软体机器人开发 | 30 | 244 | 8.13 | 2016.4 |
| 8 | 高超声速飞行器热防护技术 | 73 | 171 | 2.34 | 2017 |
| 9 | 有人机 / 无人机协同控制技术 | 49 | 210 | 4.29 | 2016.7 |
| 10 | 智能电网运行与调度技术 | 133 | 686 | 5.16 | 2016 |
《表 2.1.2》
表 2.1.2 机械与运载工程领域 Top 10 工程开发前沿核心专利逐年公开量
| 序号 | 工程开发前沿 | 2014 年 | 2015 年 | 2016 年 | 2017 年 | 2018 年 | 2019 年 |
| 1 | 基于 5G 技术的无人驾驶系统开发 | 1 | 0 | 3 | 8 | 30 | 95 |
| 2 | 水下无人航行器及其舰载技术 | 42 | 44 | 94 | 89 | 85 | 137 |
| 3 | 柔性电子制造技术 | 60 | 83 | 84 | 106 | 121 | 112 |
| 4 | 基于大数据的智能制造系统生产调度技术 | 0 | 0 | 4 | 2 | 5 | 15 |
| 5 | 复杂曲面超精密加工技术 | 5 | 14 | 10 | 14 | 11 | 14 |
| 6 | 可穿戴多功能集成传感器开发 | 6 | 8 | 18 | 36 | 34 | 17 |
| 7 | 仿生软体机器人开发 | 2 | 5 | 5 | 2 | 3 | 10 |
| 8 | 高超声速飞行器热防护技术 | 2 | 5 | 6 | 17 | 16 | 21 |
| 9 | 有人机 / 无人机协同控制技术 | 2 | 4 | 2 | 5 | 22 | 7 |
| 10 | 智能电网运行与调度技术 | 9 | 29 | 18 | 22 | 14 | 22 |
的研究前沿和热点问题,典型应用场景有:车联网、远程操控、边缘计算、建立个体与环境中一切事物的联系等。
(2) 水下无人航行器及其舰载技术
相较于传统的水下探测手段,新型水下无人航行器具有生存能力强、自主性高、不易被侦察等优点,可作为无人水下监测网络的重要节点。由于海水密度、海流、海底地形地貌等环境复杂因素的影响,水下通信带宽和传输距离的限制,水下无人航行器的使用效能受到制约。关于水下无人航行器的技术研究主要是复杂海洋环境下单体自适应跟踪控制、水下复杂环境感知及自主任务决策、跨平台通信网络中继等。为拓宽水下无人航行器的使用场景,在应用部署方面也出现了无人机空投、舰载布放等探索性研究。水下无人航行器集群协同跟踪探测效能远优于单体跟踪探测,可最大限度地发挥单一平台优势,因此在强扰动及异步航行条件下的水下无人航行器集群协同组网控制,成为后续重点研究方向。
(3) 柔性电子制造技术
柔性电子将有机 / 无机薄膜电子器件制作在柔性 / 可延性基板上,因其独特的柔性 / 延展性、高效 / 低成本的制造工艺,在信息、能源、医疗、国防等领域具有广泛应用前景,正在引领下一代电子产业技术革命。柔性电子制造可在任意形状、柔性衬底上实现纳米特征– 微纳结构 – 宏观器件的大面积集成,涉及有机、聚合物、金属、非金属、纳米等机电特性迥异的材料功能界面精确形成;突破传统微电子的尺度极限、柔性极限、可靠性极限, 促进从“平面”到“曲面”、从“二维”到“三维”、从“不可变形”到“大变形”的制造技术变革。主要技术趋势包括:发展纳米特征 – 微米结构 – 米级器件跨尺度高精度制造方法,在非平面 / 大变形基板上大面积精确制造有机或无机微纳结构,满足光学 / 电学 / 力学的苛刻性能要求;发展柔性微纳结构设计与制造方法,满足柔性电子的柔性与延展性苛刻要求(变形 >50%),突破传统硅基器件的变形极限(通常其延展性不超过 2%);改善柔性电子设计、制造及集成的可靠性,攻克柔性电子因软硬材料失配、反复弯折拉伸、多功能集成等带来的挑战。
(4) 基于大数据的智能制造系统生产调度技术
智能制造系统在大规模个性化定制的驱动下,以工业大数据、AI、产业智联网等技术为支撑,由人类专家与智能机器共同构成人机一体化的智能生产系统,成为智能制造的核心环节,且关键在于智能调度。在大数据技术出现之前,制造系统的生产调度高度依赖于精确建模和高效算法,随着产品需求、工艺形式的多样化,系统趋于复杂,传统的“因果 + 建模 + 算法”模式已举步维艰。大数据技术为解决该类问题提供了全新思路。随着信息化和自动化技术的快速进步,特别是数控机床、传感器、数据采集装置、其他具备感知能力的智能设备在制造系统中的大量使用,可以较为完备地收集制造系统的各种类型数据。采用大数据技术来分析和利用这些数据,进而实现智能调度成为当前制造系统领域的研究前沿。主要研究方向包括:制造系统人 – 信息 – 物理融合与知识生成、基于大数据的制造系统不确定性信息精准预测、人机物共融的动态生产调度、跨区域与跨尺度的分布式生产调度、模型与数据混合驱动的调度优化决策、数字孪生使能的生产调度等。
(5) 复杂曲面超精密加工技术
随着先进光学、微电子和航空航天等先端技术领域的快速发展,高性能复杂曲面元件的超精密制造需求日益增多,以满足其长寿命、高可靠、轻量化等高品质使役需求。目前在复杂曲面超精密加工方面,主要基于超高精度复杂曲面的创成理论与制造工艺方法,开展复杂曲面创成机制、材料去除机理、面型精度保障机制、先进刀具设计与制造等方面的研究,探究高精度复杂曲面元件成型演变规律。元件尺度极端化、形状复杂化、材料多样化、损伤近零化等前沿制造需求,对复杂曲面超精密加工提出了全新挑战,成为纳米精度制造科学的重要需求牵引。主要研究方向分为两方面:一是高性能复杂曲面超精密创成的新原理与新方法,引入多能场辅助制造模式,揭示加工过程中力、热、光等多能场耦合作用机制以及材料的微观断裂传递基本规律, 实现高精度低损伤制造;二是高性能复杂曲面超精密装备设计制造及加工过程智能控制体系,研究复杂曲面超精密装备设计理论和制造技术,揭示零部件特征与装备精度及加工路径的相互制约机制,实现纳米级精度控性智能制造。
(6) 可穿戴多功能集成传感器开发
柔性电子、可拉伸电子技术的发展为实现传感系统的柔性和可穿戴性提供了解决方案,可穿戴多功能传感器件可准确地将环境刺激转化为电信号, 具有精度高、贴合性好、共形性好、稳定性高等优点,广泛应用于机器人智能感知、可穿戴健康监测、康复医疗等领域。目前相关发展集中在多模态感知增敏机理研究、可拉伸材料设计与合成、多模态传感器结构设计与高效可控制备、多模态传感器高效集成等方面。多模态感知增敏机理研究针对传感器对压力、剪切力、温度、湿度等多种外界信息的感知需求,设计不同的传感原理并结合生物体感知机理,实现高性能和高灵敏度传感。可拉伸材料设计与合成通过开发具备柔性和高可拉伸性能的传感功能材料和基底材料,实现传感单元的可拉伸性。多模态传感器结构设计与高效可控制备通过结构设计来获得传感系统的高可拉伸性,包括应力分离结构设计,层次化、阵列化传感器布局结构设计,微纳结构高效可控制备工艺。多模态传感器高效集成涉及基于柔性或可拉伸基底的封装工艺,高密度传感阵列信号抗干扰读取技术,多模态传感信息智能融合处理技术。未来发展研究方向有:传感单元的高灵敏度和高响应速度,高密度、高空间分辨率、多模态传感器集成,多功能集成传感器的自适应和自主感知。
(7) 仿生软体机器人开发
近年来机器人得到了广泛工程应用,更加复杂的动态非结构化场景对机器人技术提出了更高的适应性要求。仿生软体机器人学作为机器人学科的一个分支,通过模仿生物体柔软的结构来赋予机器人较好的柔顺性和大变形能力,使其可与不可预知的环境进行形态适应交互。利用机器人材料的内在属性,降低有关机械结构和控制算法的复杂性,高自由度地实现一些复杂的功能和行为。主要研究方向有:新型智能软材料开发,新型驱动 / 功能机理, 仿生软体机器人结构设计,驱动/ 感知一体化集成, 设计 / 制造一体化技术,交互控制策略及理论,高能量密度柔性电池技术。目前的仿生软体机器人相比于生物智能还处于发展的初步阶段,未来研究将结合组织工程、人造生物学等,进一步创造具有独特的感知能力、动态响应性和移动性的生物混合系统。此外,加速协同机器人研究,使仿生软体机器人更安全地与人类和环境共融,拓展和丰富更多的应用场景。
(8) 高超声速飞行器热防护技术
飞行器长时间高超声速飞行(Ma10),气动热环境(表面温度 >1500 K)会严重威胁飞行器结构安全,开展针对性热防护设计以解决高温热烧蚀属于高超声速飞行器研制的重大关键技术。烧蚀防热通过防热材料的烧蚀产生气体,在气流作用下带走气动热以实现防热目的,是高超飞行器广泛使用的一种热防护技术。各国都在研发高性能、轻量化的耐烧蚀涂层材料,如酚醛树脂基防热复合材料、陶瓷 / 金属复合耐热功能梯度材料、氧化铝增强热屏蔽材料、氧化铝可溶改性隔热材料、超轻刚性隔热材料、合成多密度材料等刚性隔热材料,新型复合柔性隔热毡、可缝制柔性隔热毡等柔性隔热材料。随着各种新型防热材料的出现,材料的低成本生产技术是批量应用需要考虑的问题,涵盖原材料、复合工艺和质量控制等方面。主要研究方向有:低温固化 / 高温使用 / 长寿命树脂和预浸料,使用混杂纤维的复合材料,预浸料制备自动化程度提升,纤维或织物增强体的自动化铺放技术,低温固化 / 电子束固化 / 树脂传递模塑及其衍生技术等。
(9) 有人机 / 无人机协同控制技术
有人机 / 无人机协同指有人机系统与无人机系统之间在决策、规划、控制、感知等方面,既各自进行独立的计算、存储、处理,又通过交互共融达成群体协同来完成目标任务。一方面,无人机系统目前还不具备意外事件实时响应和处理能力,无法完全自主执行任务,需要由人通过数据链进行操作和控制,以确保任务完成和使用安全;另一方面, 无人机与有人机在平台能力(隐身性、机动性、滞空时间、作战半径等)、机载传感器性能、机载武器性能等方面具有能力互补的天然优势。因此,开展高端无人机和先进有人机协同作战,是一种极富潜力、可实现性强的作战样式,是弥补有人机和无人机能力不足的重要途径,将极大提高协同系统的作战效能和战场生存能力,成为空中作战模式的创新方向。主要研究内容有:多机多任务分配和动态环境下编队整体分配优化及协同态势感知与信息融合,基于任务规划指标、飞行约束条件和战场环境的有人机 / 无人机协同航路规划,基于自然语言理解的人机交互控制及信息交换,集群异构多智能体技术在有人机 / 无人机协同决策智能化方面的拓展应用。
(10) 智能电网运行与调度技术
近年来,可再生能源渗透率的提高增大了电网的不确定性,电力电子化的发展趋势使电网的相对惯量趋于减小,电力市场化的推进使多市场主体间的博弈加强,使得电网安全运行面临着前所未有的挑战。同时,电力与其他能源系统的耦合不断加强,智能电网在未来大能源体系中的枢纽平台作用日益凸显。智能电网运行与调度采用先进的传感量测技术、控制决策方法,通过电源、电网、负荷之间的互动,实现含大量可再生能源电网的安全、优质、经济、绿色运行。在电源侧,通过多种发电互补来降低可再生能源出力的波动性,提升传统发电厂的调节能力;在电网侧,采用区域互联和辅助服务交易来实现跨区平衡和消纳;在负荷侧,通过建设微网和主动配网,经由负荷集成商提供需求侧响应,或通过电力多元化转换来跨越多能源网络平衡供需。相应发展趋势有:低惯量智能电网调度运行与控制理论,保障高比例非同步机电源接入的智能电网能够安全稳定运行;新型商业模式激励发电厂商和用户向电网提供辅助服务,积极消纳可再生能源;构建数据和模型相融合的理论方法,在不确定性环境下进行智能决策,提升智能电网运行的经济性和可再生能源的利用效率。
《2.2 Top 3 工程开发前沿重点解读》
2.2 Top 3 工程开发前沿重点解读
2.2.1 基于 5G 技术的无人驾驶系统开发
发展基于 5G 技术的无人驾驶系统,可获得以下收益:扩大态势感知范围,感知更精准,更好保障行车安全;减少单车高精度传感器的部署数量, 降低感知和计算成本;实现车辆与道路实时联动, 增加道路通行效率,缓解交通拥堵;建立包括远程驾驶、编队行驶、自动泊车、车速引导、路况精准提醒、高清视频实时分享在内的网联应用。
在 5G 技术支撑下,通过协作感知,突破无人驾驶在感知层的局限性,建立车– 车、车– 基站、车– 路灯之间的通信,降低强阳光、黑夜、雾霾、暴雨等不利环境对驾驶的影响。感知交叉路口各个方位的车辆信息,使前后左右的车辆相互“透视”,由此降低单车传感器的作用权重、无人驾驶系统成本, 同时提高适用性、可靠性、安全性。5G 环境下的自动驾驶远程操控能力比 4G 要高数倍,可有效地对现场情况做出反应,提升远程操控的稳定性与实时性。利用 5G 网络为自动驾驶提供边缘计算支持, 无人驾驶系统将其传感器信息上传到边缘节点,并基于边缘节点强大的计算能力获得驾驶决策结果。增强车辆与一切事物相连的通信能力,实现信息互联,有利于交通管理部门在云端做出智能化的交通管理资源调度与决策,提高公共交通效率。
基于 5G 技术的无人驾驶系统面临安全性,泛在、统一的高精度时空基准两大挑战。5G 实现了计算与通信的融合,但 5G 的虚拟化和软件定义功能也引入了新的安全风险,相比过去的专用电信设备更易受攻击,网络稳定性也易受影响。无人驾驶行驶对自身及环境定位要求极高,亚米级甚至厘米级高精度定位是车联网开展车辆自动行驶和决策安全业务的重要保障,而协作感知的信息融合必须建立在统一的时空框架之内。亟须通过 5G + 全球导航卫星系统来建立无缝覆盖的高精度时空基准,为无人驾驶系统提供关键基础条件。
目前,本方向的核心专利产出数量较多的国家是中国、韩国、美国,篇均被引频次排在前列的国家是美国、中国、德国(见表 2.2.1)。核心专利产出数量较多的机构是乐金集团、日本电报电话公司、华为技术有限公司(见表 2.2.2)。专利主要产出国家之间、产出机构之间均不存在合作关系。
2.2.2 水下无人航行器及其舰载技术
水下无人航行器在海洋科学观测、水下目标探
《表 2.2.1》
表 2.2.1 “基于 5G 技术的无人驾驶系统开发”工程开发前沿中核心专利的主要产出国家
| 序号 | 国家 | 公开量 | 公开量比例 | 被引数 | 被引数比例 | 平均被引数 |
| 1 | 中国 | 96 | 70.07% | 82 | 77.36% | 0.85 |
| 2 | 韩国 | 15 | 10.95% | 1 | 0.94% | 0.07 |
| 3 | 美国 | 7 | 5.11% | 22 | 20.75% | 3.14 |
| 4 | 日本 | 6 | 4.38% | 0 | 0.00% | 0 |
| 5 | 德国 | 4 | 2.92% | 1 | 0.94% | 0.25 |
| 6 | 印度 | 3 | 2.19% | 0 | 0.00% | 0 |
| 7 | 瑞典 | 2 | 1.46% | 0 | 0.00% | 0 |
| 8 | 芬兰 | 1 | 0.73% | 0 | 0.00% | 0 |
| 9 | 荷兰 | 1 | 0.73% | 0 | 0.00% | 0 |
《表 2.2.2》
表 2.2.2 “基于 5G 技术的无人驾驶系统开发”工程开发前沿中核心专利的主要产出机构
| 序号 | 机构 | 国家 | 公开量 | 公开量比例 | 被引数 | 被引数比例 | 平均被引数 |
| 1 | 乐金集团 | 韩国 | 11 | 8.03% | 0 | 0.00% | 0 |
| 2 | 日本电报电话公司 | 日本 | 6 | 4.38% | 0 | 0.00% | 0 |
| 3 | 华为技术有限公司 | 中国 | 5 | 3.65% | 11 | 10.38% | 2.2 |
| 4 | 西安理工大学 | 中国 | 5 | 3.65% | 0 | 0.00% | 0 |
| 5 | 大疆创新科技有限公司 | 中国 | 3 | 2.19% | 27 | 25.47% | 9 |
| 6 | 上海朗帛通信技术有限公司 | 中国 | 3 | 2.19% | 0 | 0.00% | 0 |
| 7 | 美国电话电报公司 | 美国 | 2 | 1.46% | 16 | 15.09% | 8 |
| 8 | 德国弗劳恩霍夫应用研究促进协会 | 德国 | 2 | 1.46% | 1 | 0.94% | 0.5 |
| 9 | 广东容祺智能科技有限公司 | 中国 | 2 | 1.46% | 1 | 0.94% | 0.5 |
| 10 | 北京航空航天大学 | 中国 | 2 | 1.46% | 1 | 0.94% | 0.5 |
测等方面获得广泛应用,相关技术得到广泛关注并投入工程实践。由于复杂海洋环境对平台跟踪控制构成强扰动,水下无人航行器的跟踪探测依然是难题,相关研究重点是传感器搭载、复杂环境感知、自适应任务规划、航路规划等。水下环境复杂多变, 单一类型的探测信号局限性大,从平台角度出发扩展传感器搭载类型,利用深度学习方法分析多源数据特征,研究多源数据融合来提高平台对复杂海洋环境的感知能力。结合先验信息和环境感知结果来建模水下环境,针对探测任务需求与跟踪目标特性, 实施水下自主航行器的自适应跟踪探测。
以集群协同组网的模式部署水下无人航行器, 执行复杂环境下的跟踪探测任务是应用发展趋势, 关键在于使多平台达到某些维度上的一致性。通常需要利用通信网络来获得相邻平台或者所有平台的信息,采取协同策略来生成控制指令以保障一致性。计及水下扰动和通信迟滞,开展水下无人航行器分布式协同研究,即设计分布式一致性协议,给定期望的一致性变量,利用映射关系反演所需的控制系数,实现多个水下无人航行器的协同设计。水下无人航行器也可作为水面舰艇或者潜艇的支援平台, 其外形包络与当前服役的水中兵器类似。发展水下无人航行器舰载技术,拓展传统水下无人航行器的使用场景、简化部署环节,如利用鱼雷发射管自航布放、水下气动布放、舰载无人机空投布放等。
目前,本方向的核心专利产出数量较多的国家是中国、美国、日本,篇均被引频次排在前列的国家是美国、意大利、德国(见表 2.2.3);美国和哥伦比亚合作较多,意大利和荷兰、美国和荷兰、日本和哥伦比亚均存在合作(见图 2.2.1)。核心专利产出数量排在前列的机构是哈尔滨工程大学、美国海军、中国船舶集团有限公司(见表 2.2.4); 专利主要产出国家之间不存在合作关系。
2.2.3 柔性电子制造技术
随着晶体管特征尺寸逐渐接近极限,近年来从功能集成的角度提出“超越摩尔定律”,从硅基微电子发展到聚合物基柔性电子,应用领域从信息处理扩展到光电器件、生物传感、人机交互、健康医疗等,正在变革整个电子制造技术与产业。柔性电子材料、器件、工艺与装备的系统研究是实现柔性电子从实验室走向工业应用的关键,也是下一代信息产业的突破口和制高点。2018 年“美国制造业创新网络”将柔性混合电子制造列为第 7 个主题, 欧盟、英国、韩国、日本也纷纷启动综合性计划以大力发展柔性电子技术和产品。
《表 2.2.3》
表 2.2.3 “水下无人航行器及其舰载技术”工程开发前沿中核心专利的主要产出国家
| 序号 | 国家 | 公开量 | 公开量比例 | 被引数 | 被引数比例 | 平均被引数 |
| 1 | 中国 | 196 | 36.57% | 398 | 16.49% | 2.03 |
| 2 | 美国 | 177 | 33.02% | 1587 | 65.77% | 8.97 |
| 3 | 日本 | 45 | 8.40% | 67 | 2.78% | 1.49 |
| 4 | 德国 | 27 | 5.04% | 155 | 6.42% | 5.74 |
| 5 | 俄罗斯 | 27 | 5.04% | 11 | 0.46% | 0.41 |
| 6 | 哥伦比亚 | 20 | 3.73% | 60 | 2.49% | 3 |
| 7 | 英国 | 16 | 2.99% | 63 | 2.61% | 3.94 |
| 8 | 韩国 | 16 | 2.99% | 19 | 0.79% | 1.19 |
| 9 | 荷兰 | 5 | 0.93% | 2 | 0.08% | 0.4 |
| 10 | 意大利 | 4 | 0.75% | 24 | 0.99% | 6 |
《表 2.2.4》
表 2.2.4 “水下无人航行器及其舰载技术”工程开发前沿中核心专利的主要产出机构
| 序号 | 机构 | 国家 | 公开量 | 公开量比例 | 被引数 | 被引数比例 | 平均被引数 |
| 1 | 哈尔滨工程大学 | 中国 | 110 | 20.52% | 281 | 11.65% | 2.55 |
| 2 | 美国海军 | 美国 | 35 | 6.53% | 80 | 3.32% | 2.29 |
| 3 | 中国船舶集团有限公司 | 中国 | 16 | 2.99% | 13 | 0.54% | 0.81 |
| 4 | 阿特拉斯电子有限公司 | 德国 | 15 | 2.80% | 142 | 5.88% | 9.47 |
| 5 | 波音公司 | 美国 | 13 | 2.43% | 19 | 0.79% | 1.46 |
| 6 | 雷神公司 | 美国 | 12 | 2.24% | 28 | 1.16% | 2.33 |
| 7 | 西北工业大学 | 中国 | 11 | 2.05% | 9 | 0.37% | 0.82 |
| 8 | Adaptive Methods Inc. | 美国 | 10 | 1.87% | 25 | 1.04% | 2.5 |
| 9 | 海底七有限公司 | 英国 | 8 | 1.49% | 29 | 1.20% | 3.63 |
| 10 | 川崎重工业株式会社 | 日本 | 8 | 1.49% | 7 | 0.29% | 0.88 |
《图 2.2.1》

图 2.2.1 “水下无人航行器及其舰载技术”工程研究前沿主要国家间的合作网络
为了突破传统微电子的尺度极限、柔性极限、可靠性极限,开拓柔性电子产品创新 / 重大应用, 应系统地开展柔性电子制造的新型材料、工艺机理和装备原理研究,构建理论、技术和装备支撑。相关研究方向包括:高性能柔性电子功能材料研发与制备,研究柔性电子功能材料的制备新原理与新技术、功能材料与聚合物的表界面控制、纳米复合功能纤维、纳米尺度纤维及低维功能材料制备的新方法;大面积柔性致密薄膜的高效低温制备,研究柔性基板上的电极层、半导体层、介电层和密封层的低温气相、液相薄膜沉积技术、印刷技术,探索低温工艺下异质薄膜的界面性能及其调控方法;柔性微纳结构跨尺度图案化制造,采用大尺寸大面积元件以支持柔性功能结构向微米、亚微米线宽发展, 优选新型印刷技术、高速率激光图案化技术、图案化溅射沉积工艺等,提升制造精度和效率;柔性混合电子器件系统高效集成,针对高集成度与分布式融合特征,研究不同物理化学特性的材料、尺寸差异极大的异质元器件集成涉及的表 / 界面效应及其调控;柔性电子器件设计与可靠性保证,研究柔性电子的机械性能、有机 / 无机材料的界面强度、系统的疲劳寿命等。
目前,本方向的核心专利产出数量较多的国家是中国、美国、韩国,篇均被引频次排在前列的国家是法国、美国、荷兰(见表 2.2.5);注重领域合作的国家有美国和韩国、中国和英国(见图2.2.2)。核心专利产出数量较多的机构是东洋纺有限公司、日产化学工业株式会社、三星电子材料有限公司(见表 2.2.6)。相关机构中三星电子材料有限公司和韩国科学技术院存在较多合作(见图 2.2.3)。
《表 2.2.5》
表 2.2.5 “柔性电子制造技术”工程开发前沿中核心专利的主要产出国家
| 序号 | 国家 | 公开量 | 公开量比例 | 被引数 | 被引数比例 | 平均被引数 |
| 1 | 中国 | 165 | 24.59% | 292 | 5.79% | 1.77 |
| 2 | 美国 | 152 | 22.65% | 2948 | 58.41% | 19.39 |
| 3 | 韩国 | 110 | 16.39% | 217 | 4.30% | 1.97 |
| 4 | 日本 | 104 | 15.50% | 423 | 8.38% | 4.07 |
| 5 | 法国 | 18 | 2.68% | 432 | 8.56% | 24 |
| 6 | 英国 | 17 | 2.53% | 162 | 3.21% | 9.53 |
| 7 | 瑞士 | 10 | 1.49% | 42 | 0.83% | 4.2 |
| 8 | 德国 | 8 | 1.19% | 28 | 0.55% | 3.5 |
| 9 | 意大利 | 8 | 1.19% | 27 | 0.53% | 3.38 |
| 10 | 荷兰 | 7 | 1.04% | 68 | 1.35% | 9.71 |
《表 2.2.6》
表 2.2.6 “柔性电子制造技术”工程开发前沿中核心专利的主要产出机构
| 序号 | 机构 | 国家 | 公开量 | 公开量比例 | 被引数 | 被引数比例 | 平均被引数 |
| 1 | 东洋纺有限公司 | 日本 | 22 | 3.28% | 29 | 0.57% | 1.32 |
| 2 | 日产化学工业株式会社 | 日本 | 18 | 2.68% | 24 | 0.48% | 1.33 |
| 3 | 三星电子材料有限公司 | 韩国 | 16 | 2.38% | 81 | 1.60% | 5.06 |
| 4 | 韩国电子通信研究院 | 韩国 | 14 | 2.09% | 37 | 0.73% | 2.64 |
| 5 | 韩国科学技术院 | 韩国 | 12 | 1.79% | 17 | 0.34% | 1.42 |
| 6 | 英特尔公司 | 美国 | 10 | 1.49% | 45 | 0.89% | 4.5 |
| 7 | 清华大学 | 中国 | 10 | 1.49% | 27 | 0.53% | 2.7 |
| 8 | MC10 Inc. | 美国 | 9 | 1.34% | 365 | 7.23% | 40.56 |
| 9 | 加利福尼亚大学 | 美国 | 9 | 1.34% | 86 | 1.70% | 9.56 |
| 10 | LG 集团 | 韩国 | 9 | 1.34% | 44 | 0.87% | 4.89 |
《图 2.2.2》
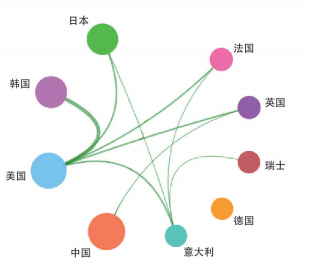
图 2.2.2 “柔性电子制造技术”工程研究前沿主要国家间的合作网络
《图 2.2.3》
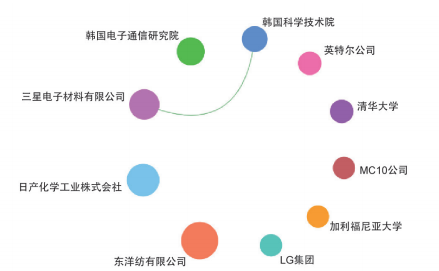
图 2.2.3 “柔性电子制造技术”工程开发前沿的主要机构间合作网络
领域课题组人员
课题组组长:
| 段正澄 |
郭东明
课题组成员:
蒋庄德 黄庆学 樊会涛 向锦武 刘怡昕
杜善义 徐德民 马伟明 徐 青 陈玉丽
宋爱国 方勇纯 彭志科 尧命发 刘 辛
王钻开 王立平 陈伟球 陈海生 王开云
訾 斌 轩福贞 王 东 贺 永 郑津洋
陈 旭 贾利民 史铁林 姬 学
执笔组成员:
黄 培 闫春泽 刘晓伟 轩建平 夏 凉
罗飞腾 刘智勇 赵江滨 孙 博 李开成
魏蛟龙 李宝仁 黄永安 高 亮 许剑峰
尹周平 吴 豪 吴志刚 李毅超 张园园
文劲宇 姚 伟 夏 奇 陈惜曦











 京公网安备 11010502051620号
京公网安备 11010502051620号




