
《1 工程研究前沿》
1 工程研究前沿
《1.1 Top 10 工程研究前沿发展态势》
1.1 Top 10 工程研究前沿发展态势
信息与电子工程领域 Top 10 工程研究前沿见表 1.1.1,涉及电子科学与技术、光学工程与技术、仪器科学与技术、信息与通信工程、计算机科学与技术、控制科学与技术等学科方向。其中,“类脑智能芯片”“边缘计算”“对抗学习”这 3 项基于科睿唯安数据挖掘经专家研判获得,其他 7 项基于专家推荐,经数据与专家交互获得。各前沿涉及的核心论文 2014—2019 年发表情况见表 1.1.2,其中, “6G 无线传输与网络构架”近年来核心论文发表数量增速最显著。
(1) 类脑智能芯片
类脑智能芯片,也称类脑芯片,是借鉴人脑处理信息的基本原理,面向类脑智能而发展的新型信息处理芯片,可分为类脑计算和类脑感知芯片。类脑计算芯片是借鉴脑科学基本原理,面向类脑智能发展的非冯·诺依曼新型信息处理芯片。有别于提供专有算法的加速平台,类脑计算芯片旨在像大脑一样以低功耗、高并行、高效率、通用、强鲁棒和智能地处理各种复杂非结构化信息。类脑感知芯片是借鉴生物感知基本原理实现信息感知的新型芯片,作为类脑计算芯片的信号输入器件,类脑感知芯片为类脑计算芯片提供高灵敏、精确、高速的感知信息,有效地保障类脑计算芯片正确地进行学习、记忆、识别、认知和决策等智能化处理。类脑芯片技术是一项新兴技术,目前没有明确的技术方案和研究路线图,美国、英国、德国、法国、韩国、日本、瑞士、新加坡、中国等国家的研究团队分别从架构、模型、集成电路、器件、编解码、信号处理、设计、制程、集成、测试和软件等各个层次探索类脑芯片的解决方案。类脑芯片是类脑智能发展的基石,特别适合于实时高效地解决不确定及复杂环境下的问题,可以赋能各行各业,全面带动工业、农业、医疗、金融以及国防等各行业的飞速发展。
(2) 多尺度时空超分辨医学成像仪器
重大疾病往往在发生发展机制上呈现复杂性, 在人类科技已取得巨大成就的今天,疾病(如肿瘤) 的早期预警与诊断,仍然是我们面临的重大难题之
《表 1.1.1》
表 1.1.1 信息与电子工程领域 Top 10 工程研究前沿
| 序号 | 工程研究前沿 | 核心论文数 | 被引频次 | 篇均被引频次 | 平均出版年 |
| 1 | 类脑智能芯片 | 60 | 5664 | 94.4 | 2016.1 |
| 2 | 多尺度时空超分辨医学成像仪器 | 120 | 6774 | 56.45 | 2015.5 |
| 3 | 边缘计算 | 492 | 32594 | 66.25 | 2017.4 |
| 4 | 6G 无线传输与网络构架 | 22 | 750 | 34.09 | 2018.3 |
| 5 | 碳基集成电路 | 72 | 4413 | 61.29 | 2015.8 |
| 6 | 天地一体化定位导航体系 | 9 | 532 | 59.11 | 2016.2 |
| 7 | 对抗学习 | 216 | 10725 | 49.65 | 2017.6 |
| 8 | 超精密三维显微原理与仪器 | 83 | 2909 | 35.05 | 2015.4 |
| 9 | 面向信息物理融合系统的软件自动化 | 237 | 5479 | 23.12 | 2015.7 |
| 10 | 长距离水下无线光通信 | 55 | 2875 | 52.27 | 2016.4 |
《表 1.1.2》
表 1.1.2 信息与电子工程领域 Top 10 工程研究前沿核心论文逐年发表数
| 序号 | 工程研究前沿 | 2014 年 | 2015 年 | 2016 年 | 2017 年 | 2018 年 | 2019 年 |
| 1 | 类脑智能芯片 | 10 | 14 | 12 | 11 | 8 | 5 |
| 2 | 多尺度时空超分辨医学成像仪器 | 38 | 28 | 21 | 24 | 7 | 2 |
| 3 | 边缘计算 | 15 | 27 | 57 | 119 | 178 | 96 |
| 4 | 6G 无线传输与网络构架 | 0 | 0 | 1 | 5 | 3 | 13 |
| 5 | 碳基集成电路 | 16 | 20 | 14 | 10 | 9 | 3 |
| 6 | 天地一体化定位导航体系 | 1 | 3 | 1 | 1 | 3 | 0 |
| 7 | 对抗学习 | 6 | 10 | 13 | 54 | 91 | 42 |
| 8 | 超精密三维显微原理与仪器 | 27 | 18 | 19 | 17 | 2 | 0 |
| 9 | 面向信息物理融合系统的软件自动化 | 63 | 53 | 49 | 37 | 25 | 10 |
| 10 | 长距离水下无线光通信 | 2 | 9 | 17 | 19 | 7 | 1 |
一。医学成像仪器利用电磁波(X 射线、正电子或光子)或声波等与研究对象的相互作用,在宏观、介观、微观、纳观尺度上获取疾病相关的结构、生理、细胞或分子的时间序列信息。提供结构和生理信息的宏观成像系统如X 射线断层成像、核磁共振成像、超声、正电子发射断层成像、单光子发射断层成像, 已经在临床实践中广泛应用。
理想的成像仪器应该是定量且高时空分辨的, 能够得到高灵敏度和高特异性的组织结构信息、生理代谢信息、分子信息甚至基因信息,为临床医生对疾病的诊断和监控提供全面的帮助。目前,欧美等地区的政府、学术界、工业界高度重视这样的成像仪器研发。“分子影像”“精准医学”和各种“脑计划”无不依赖多尺度时空超分辨医学成像仪器的进步。多尺度时空超分辨医学成像仪器的主要研究方向包括:①发展超高时间分辨、空间分辨的结构与功能成像技术,以及图像处理分析新方法,为疾病诊断提供新工具;②发展多参数时空动态同时成像系统,揭示各监测参数之间的关联,从各参数响应的快慢推测病理生理反应中的因果关系,诠释病理生理反应机制;③联合利用光、声、电、磁等手段,发展覆盖分子—细胞—组织—器官等多个尺度的在体高分辨成像理论与技术。
(3) 边缘计算
物联网、移动互联网技术的发展使得网络边缘侧数据发生爆炸式增长,基于云计算模型的单一计算资源已不能满足大数据处理的实时性、安全性和低能耗等需求,在此背景下,边缘计算应运而生。边缘计算是指在网络边缘侧执行计算的一种新型计算模式。区别于云计算,边缘计算可以在靠近物或数据源的一侧就近提供服务,具有低延迟、高隐私等技术特点。
近年来,边缘计算在学术界、工业界得到广泛关注。美国韦恩州立大学施巍松教授团队于2016 年 5 月首次定义边缘计算。同年,美国计算机协会(ACM)与电气和电子工程师协会(IEEE) 联合资助并发起边缘计算国际研讨会 ACM/IEEE Symposium on Edge Computing (SEC)。随后MobiCom、INFOCOM 等重要国际会议相继增加边缘计算主题。亚马逊公司于 2017 年发布 Greengrass 平台,支持在边缘侧部署机器学习服务。随后,云平台提供商谷歌、微软、阿里云、百度相继发布各自的边缘计算软硬件平台。开源软件项目EdgeX、KubeEdge 等积极推进,在开源社区、学术界、工业界产生重要影响。中国边缘计算发展速度和世界几乎同步。2016 年 11 月,华为联合国内外多家企业成立边缘计算产业联盟。阿里巴巴集团、腾讯公司等互联网企业,中国移动通信集团公司、中国联合网络通信集团有限公司、中国电信集团公司等移动运营商,都积极部署边缘计算战略。安防视频龙头企业海康威视数字技术股份有限公司于 2017 年发布 AI Cloud 框架,重点关注边缘计算。未来边缘计算的主要研究方向包括边缘计算系统平台、云边任务协同调度机制、边缘智能算法、边缘计算创新应用等。
(4)6G 无线传输与网络构架
第六代移动通信系统(6G)是面向 2030 年信息社会发展的新一代移动通信技术。6G 期望引入新的性能指标与应用场景,例如,提供全球覆盖、更高的频谱 / 能量 / 成本效率、更高的智能化水平与安全性等。为了满足这些需求,6G 依赖于新的使能技术,将出现新的 4 大范式转换,可以概括为“全覆盖、全频谱、全应用、强安全”。6G 将具备超高吞吐量(Tbps)、超高频谱效率(kbps/ Hz)、超低时延(μs)及全球覆盖(90%)的能力, 支持更加异构多样的业务类型。
6G 网络架构研究面向全社会、全行业、全生态的网络自治与智能生成,以数据为中心的 ICDT 深度融合和多维立体全场景服务下新型绿色无线网络架构及组网关键技术。6G 无线传输正开展包括波形设计、多址接入、信道编码以及无蜂窝大规模多入多出(MIMO)等研究。6G 将不局限于陆地无线移动通信网络,需要卫星、无人机等非陆地网络作为有效补充,构建空天地海一体化网络。为进一步提升数据传输速率和连接数密度,将充分挖掘包括 Sub-10 GHz、毫米波、太赫兹、光频段在内的全频谱资源。超异构网络、多种通信场景、大量天线单元、大带宽、新服务需求的出现,将产生海量数据,6G 将借助人工智能与大数据技术实现一系列智能化应用。
(5) 碳基集成电路
碳基集成电路是指采用碳纳米管作为有源层的晶体管构成的集成电路。碳纳米管具有超高的室温载流子迁移率、极低的本征电容和优异的静电学特性,有望构建更高性能、更低功耗和更易微缩的晶体管。从广义上讲,碳基集成电路充分利用碳纳米管等新型纳米半导体材料独特的物理、电子、化学和机械优势,构建性能优异、功耗低的信息处理芯片,更为灵敏、形态更为丰富的传感器,以及工作频段更高、速度更快的通信芯片,并有望实现这些功能芯片的在片三维集成,构建性能更高的信息处理系统。
碳基集成电路经历了 20 多年基础研究阶段, 发展出包括碳基材料制备和输运性质研究、器件物理和互补金属氧化物半导体(CMOS)器件制备方法和基本集成电路构建等在内的完整技术体系,验证并初步实现了碳基器件在能效上的优势。目前开始进入工程化阶段,继续发展需要解决晶圆级材料制备、先进技术节点碳基 CMOS 晶体管制备技术、电子设计自动化(EDA)平台、碳基集成电路设计等重要问题。
2018 年 7 月,在美国国防部高级研究计划局(DARPA)“电子复兴”(ERI)计划资助下,美国麻省理工学院联合美国亚德诺半导体(ADI)公司、美国空军研究实验室,使用行业标准设计流程和加工工艺,推进碳基集成电路的工程化发展。同年,中国北京大学推进先进技术节点碳基集成电路技术工程化发展。
(6) 天地一体化定位导航体系
天地一体化导航定位体系是以全球卫星导航系统为核心,以低轨星、空地伪卫星、地面 5G 等通信网络以及多种室内外定位导航源为手段,基于网络化时空资源统一管理与云端协同监测处理,构建从地下到深空,具有“泛在、精准、统一、融合、智能”特征的天地一体化导航定位网络体系。其主要研究方向为:①以全球卫星导航系统为基石,开展地下 / 地面 / 空中 / 低轨星导航源无线基站定位技术研究,形成与全球导航卫星系统空间信号兼容、通导融合以及时空统一的天地一体化导航增强网络,实现泛在的室内外无缝精准定位、导航与授时(PNT)服务。②以异构多导航源混合网络为主体, 加强与物联网和 5G 网络的融合协同,开展智能混合云定位技术研究,通过时空大数据智能化处理提升个体及群体的连续可信导航与授时(PNT)服务能力。③以泛在实时精准定位数据为基础,以全息位置地图为支撑,开展网络化位置服务操作系统平台和开放标准协议技术研究,实现用户时空信息关联的多维空间智能化位置服务。天地一体化导航定位体系的建设将引领 PNT 技术快速发展,使 PNT 信息与大数据业务广泛融合,催生人工智能技术对时空大数据的深度挖掘,推动PNT 技术向更加泛在、更加融合、更加智能的国家综合 PNT 体系发展。
(7) 对抗学习
对抗学习研究如何通过数据扰动来探查、利用机器学习算法的脆弱性并削弱机器学习系统的安全性,同时通过对抗训练等方法填补模型漏洞,以提升机器学习算法在对抗环境下的鲁棒性与泛化能力。对抗学习可应用于计算机视觉、自然语言处理、无人驾驶系统等领域的模型不确定性评估与神经网络漏洞探查,近期研究也显示其在深度学习加速训练与人工智能系统鲁棒性提升等方向的巨大潜力。对抗学习的研究方向主要包括对抗攻击、对抗防御以及对抗博弈 3 个方面。其中对抗攻击研究在数据样本上生成和优化对抗噪声的方法,根据攻击方对目标模型了解程度的高低可分为白盒攻击和黑盒攻击。对抗防御研究如何通过噪声检测和主动防御实现模型鲁棒性的提升。对抗博弈则研究通过攻防双方博弈式的训练过程提升模型性能的方法,如利用生成器和判别器相互博弈学习的生成式对抗网络。物理攻击、自然噪声生成和对抗训练加速是对抗学习未来的重要发展方向。物理攻击需要摆脱现有方法对模拟场景的依赖,构建在真实世界不同角度、距离和光照条件下均具备攻击能力的对抗样本。为进一步提升对抗噪声的自然性,需利用生成式对抗网络将对抗样本映射到原始图像的流形。针对现有对抗训练方法通用性差、收敛速度慢的问题,需推广生成式对抗网络的学习框架,在协同训练中提升多模型鲁棒性与泛化能力,同时加速训练过程的收敛。
(8) 超精密三维显微原理与仪器
显微测量的表征精度代表人类微制造的能力极限。新一代微器件与微系统技术全面进入立体集成时代,超精密级三维微结构功能化表征成为全球信息产业竞争的质量基础和科学前沿。光学显微测量属于非接触测量,具有空间分辨力高、不损伤样品等优点,广泛应用于高灵敏度光电探测器、高效照明发光二极管(LED)、高集成度微机电系统(MEMS)器件制造以及增强现实 / 虚拟现实(AR/ VR)系统中超光滑曲面宏微复合结构测量等。超精密三维显微测量是纳米器件与微系统不断突破极限性能的必备手段,主要研究方向涵盖超精密三维显微测量创新原理与方法、测量结果的三维重构及可视化、误差分析与测量不确定度评定、超精密三维显微仪器的校准及量值溯源等。发展趋势包括:①异型微结构功能化几何参数的高精度表征;②复杂工业场景下产品关键几何参数的在线测量及智能监测;③复合式多模态参数测量仪器的创新集成;④三维显微计量理论新突破。
(9) 面向信息物理融合系统的软件自动化
信息物理融合系统(CPS)是信息空间和物理空间紧耦合环境下软件和系统发展的新形态。它通过感知、计算、通信和控制的有机融合与深度协作, 完成和优化复杂系统的各种功能和智能服务,广泛应用于国民经济各个领域,加速软件成为信息社会基础设施。相应地,高安全、高可靠和高可用是其刚需。基于模型 / 合约的方法是 CPS 设计的主流途径,其中基于模型的设计通过抽象 / 精化对复杂CPS 进行不同抽象粒度建模并建立模型间一致性,而基于合约设计通过组合/ 分解对复杂 CPS 进行不同视点建模并建立视点模型和系统模型间一致性。但是,如何建立基于模型和合约的CPS 设计理论, 保证设计正确的 CPS 抽象模型,并高效地自动生成和演进正确可靠的程序代码,是一个巨大挑战。在代码生成自动化方面,目前工业界主要采取以Simulink/Stateflow 为代表的基于仿真的方法;学术界主要采取基于形式验证和综合的方法。基于仿真的方法由仿真图形模型直接生成代码,直观、高效, 易于使用,但是无法保证生成程序代码的可靠性; 基于形式验证和综合的方法首先建立系统形式模型并验证其正确性,然后由验证模型根据精化理论生成正确程序代码,但是效率低、不易使用、扩展性差。未来的趋势是将上述两种方法结合,共同解决安全可靠的 CPS 控制软件的高效设计、自动生成和演进问题。
(10) 长距离水下无线光通信
长距离水下无线光通信是以光作为信息载体在水下进行长距离无线通信的技术,其具有带宽高、功耗体积小、时延低、安全性好等优势,在海底勘探、海洋监测及水下组网等领域已成为世界各国竞相发展的重要通信技术之一。长距离水下无线光通信基于大功率光源、高灵敏探测器、信号处理技术和自动捕获、跟踪、瞄准系统,最新研究成果已证明高数据速率(Gbps 量级)和长传输距离(超过100 m)水下无线光通信的可行性,也显示其用于水下数据传输、水下照明与通信、水下定位、无人潜器集群间通信及军事领域的巨大潜力。尽管长距离水下无线光通信仍面临诸多挑战,其仍是深海通信中的重要组成部分。
针对水下无线光通信系统具有的独特信道,对其固有光学特性、体散射函数以及海水中的气泡和湍流等特性的研究是设计长距离水下无线光通信系统的基础;光信号在水下传输衰减严重,高功率、高光束质量的光源和高灵敏的探测器也是构建长距离水下无线光通信系统的重点;结合光信号在海水中的散射和多径特性,设计合适的信道编码、信道均衡、分集复用等高效率的信号处理技术提高系统鲁棒性。此外人工智能可以在无法准确建模的情况下,使系统从经验中学习,提升系统性能,有助于水下无线光通信系统的智能化。
《1.2 Top 3 工程研究前沿重点解读》
1.2 Top 3 工程研究前沿重点解读
1.2.1 类脑智能芯片
类脑芯片目前没有公认的技术方案和研究路线图,全球的研究团队分别从架构、模型、集成电路、器件、编解码、信号处理、设计、制程、集成、测试和软件等各个层次探索类脑芯片的解决方案。类脑芯片架构是基础,由于大脑信息编码具有时空融合特性,国外主要类脑芯片均采用时空融合架构, 支持具有高度时空复杂性的脉冲神经网络算法模型。按数据表达分类,目前类脑计算芯片架构分为数字型架构、模拟型架构和数模混合型架构。利用超大规模集成电路来实现神经网络模型,用于构建类脑的感知和计算系统,是由Carver A. Mead 等人在 20 世纪 80 年代末提出的。以类脑计算方案与传统冯·诺依曼架构背离程度为标准,可将方案的层次从上到下大致分为程序级、架构级、电路级和器件级等层次。据此,现有主流方案代表有:英国曼彻斯特大学的 SpiNNaker 是程序级的代表,IBM 的TrueNorth、Intel 的 Loihi 和清华大学的 Tianjic 是架构级的代表,德国海德堡大学的 BrainScaleS 是电路级的代表,美国斯坦福大学的 Neurogrid 是器件工作状态级的代表。
除了基于硅技术的类脑芯片外,还有基于新型纳米器件的类脑芯片,例如阻变存储器和忆阻器阵列(STT-RAM、PCM、RRAM 等)。这种芯片直接利用定制的器件结构来模拟生物神经元的电特性, 集成度更高,是非常有潜力的类脑芯片方案。但是目前大规模阻变存储器制造工艺相对不成熟,一致性和重现性都较差,现在还没有与基于硅技术的类脑芯片规模相当的芯片。
类脑芯片研究的核心是要借鉴哪些脑科学原则,在类脑芯片中表达、存储、计算和传输信息, 用芯片和软件协同设计去控制、调度和管理信息。目前主要采用的核心技术包括存算一体、事件确定、高度并行、异步、稀疏编码和异构融合等。利用未来计算机架构发展的黄金十年,需要扩展图灵计算架构,利用模型、芯片、软件协同设计的方式创新发展类脑芯片。
如今窄人工智能发展碰到的问题,例如小或者脏数据,不确定性新问题或不完整的知识,动态、多体系多模态复杂系统等,最好的解决方案是发展类脑通用智能,类脑芯片是类脑通用智能的基石, 类脑智能可以赋能各行各业,全面推动工业、农业、医疗、金融以及国防等行业飞速发展。
“类脑芯片”工程研究前沿中核心论文的主要产出国家以及研究单位分布情况见表 1.2.1 和表 1.2.2。“类脑芯片”工程研究前沿中施引核心论文的主要产出国家以及研究单位分布情况见表1.2.3 和表 1.2.4。类脑芯片研究在学术界和企业界得到广泛关注,美国研究基础特别雄厚,核心论文排名第 1;中国和瑞士核心论文分别居于第 2、第 3 位。在排名前 10 的核心论文主要产出机构中, 5 家来自美国,3 家来自中国,2 家来自瑞士(见表 1.2.2)。美国和中国目前在这个研究领域合作较多(见图 1.2.1)。从表 1.2.2 可以看出,在研究机构中,苏黎世联邦理工学院、苏黎世大学、密西根大学、普渡大学等在核心论文发表方面处于前列。在机构合作方面,苏黎世联邦理工学院与苏黎世大学合作最为密切(见图 1.2.2)。
1.2.2 多尺度时空超分辨医学成像仪器
计算机断层扫描(CT)的问世被公认为伦琴(W. C. Rontgen)发现 X 射线以来的重大突破,因为它标志着物理学、电子学、计算机学和数学相结合的里程碑。成像可以利用自身 / 内源信号、成像分子探针和信号来定性或定量检测生物体内生理和病理变化。医学成像仪器的研发具有科学前沿和综合交叉的双重特征。借助成像仪器,人类不断延伸和扩展在时空间分辨和识别判读等方面的能力。可以说,成像技术为推动医学和生命科学的发展发挥了巨大作用。恶性肿瘤和心脑血管疾病作为人类健康杀手,是导致人类死亡率最高的两类疾病。科学技术发展对这些疾病的诊断与预警提出更高要求,
《表 1.2.1》
表 1.2.1 “类脑智能芯片”工程研究前沿中核心论文的主要产出国家
| 序号 | 国家 | 核心论文数 | 论文比例 | 被引频次 | 篇均被引频次 | 平均出版年 |
| 1 | 美国 | 38 | 63.33% | 3702 | 97.42 | 2016.3 |
| 2 | 中国 | 13 | 21.67% | 1141 | 87.77 | 2017.2 |
| 3 | 瑞士 | 8 | 13.33% | 645 | 80.62 | 2015.2 |
| 4 | 德国 | 6 | 10.00% | 349 | 58.17 | 2016.5 |
| 5 | 韩国 | 5 | 8.33% | 430 | 86 | 2016 |
| 6 | 日本 | 4 | 6.67% | 645 | 161.25 | 2015 |
| 7 | 新加坡 | 4 | 6.67% | 224 | 56 | 2017 |
| 8 | 英国 | 3 | 5.00% | 488 | 162.67 | 2015.7 |
| 9 | 法国 | 3 | 5.00% | 432 | 144 | 2015.3 |
| 10 | 卡塔尔 | 2 | 3.33% | 367 | 183.5 | 2016.5 |
《表 1.2.2》
表 1.2.2 “类脑智能芯片”工程研究前沿中核心论文的主要产出机构
| 序号 | 机构 | 核心论文数 | 论文比例 | 被引频次 | 篇均被引频次 | 平均出版年 |
| 1 | 苏黎世联邦理工学院 | 8 | 13.33% | 645 | 80.62 | 2015.2 |
| 2 | 苏黎世大学 | 6 | 10.00% | 525 | 87.5 | 2015.3 |
| 3 | 密西根大学 | 4 | 6.67% | 495 | 123.75 | 2016.8 |
| 4 | 普渡大学 | 4 | 6.67% | 217 | 54.25 | 2016.2 |
| 5 | 康奈尔大学 | 3 | 5.00% | 582 | 194 | 2015.3 |
| 6 | IBM 公司 Almaden 研究中心 | 3 | 5.00% | 478 | 159.33 | 2015 |
| 7 | 清华大学 | 3 | 5.00% | 340 | 113.33 | 2018 |
| 8 | 西南大学 | 3 | 5.00% | 157 | 52.33 | 2017 |
| 9 | 亚利桑那州立大学 | 3 | 5.00% | 156 | 52 | 2016 |
| 10 | 中国科学院 | 3 | 5.00% | 126 | 42 | 2017.3 |
《图 1.2.1》
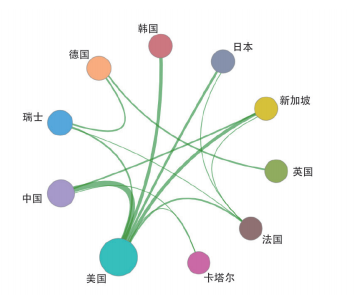
图 1.2.1 “类脑智能芯片”工程研究前沿主要国家间的合作网络
《图 1.2.2》
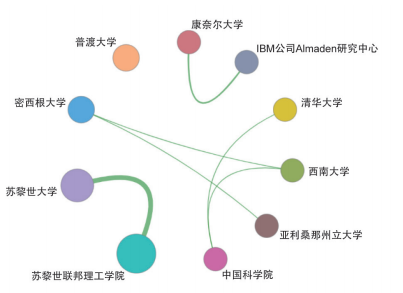
图 1.2.2 “类脑智能芯片”工程研究前沿主要机构间的合作网络
《表 1.2.3》
表 1.2.3 “类脑智能芯片”工程研究前沿中施引核心论文的主要产出国家
| 序号 | 国家 | 施引核心论文数 | 施引核心论文比例 | 平均施引年 |
| 1 | 美国 | 1287 | 29.14% | 2018.4 |
| 2 | 中国 | 1262 | 28.58% | 2018.7 |
| 3 | 韩国 | 316 | 7.16% | 2018.7 |
| 4 | 英国 | 267 | 6.05% | 2018.3 |
| 5 | 瑞士 | 242 | 5.48% | 2017.8 |
| 6 | 德国 | 240 | 5.43% | 2018.5 |
| 7 | 法国 | 188 | 4.26% | 2018.2 |
| 8 | 日本 | 186 | 4.21% | 2018.7 |
| 9 | 印度 | 150 | 3.40% | 2018.8 |
| 10 | 新加坡 | 142 | 3.22% | 2018.5 |
《表 1.2.4》
表 1.2.4 “类脑智能芯片”工程研究前沿中施引核心论文的主要产出机构
| 序号 | 机构 | 施引核心论文数 | 施引核心论文比例 | 平均施引年 |
| 1 | 中国科学院 | 178 | 16.35% | 2018.8 |
| 2 | 苏黎世联邦理工学院 | 151 | 13.87% | 2017.5 |
| 3 | 清华大学 | 123 | 11.29% | 2018.3 |
| 4 | 苏黎世大学 | 105 | 9.64% | 2017.2 |
| 5 | 首尔大学 | 105 | 9.64% | 2018.4 |
| 6 | 华中科技大学 | 82 | 7.53% | 2018.7 |
| 7 | 中国科学院大学 | 73 | 6.70% | 2018.9 |
| 8 | 普渡大学 | 71 | 6.52% | 2018.3 |
| 9 | 北京大学 | 70 | 6.43% | 2018.6 |
| 10 | 新加坡国立大学 | 66 | 6.06% | 2018.5 |
这是传统成像仪器难以胜任的。新现象的发现,优化技术、探测技术、高速采集和信号处理技术的发展,为成像仪器发展注入新鲜血液。
医学成像仪器的发展趋势如下:
(1) 发展超时间分辨、超空间分辨、超灵敏度的测量新技术。医学成像仪器能够在活体状态下对生物过程进行定性和定量研究,对生物体生理、病理变化进行实时、动态、无创成像。高时间分辨率、高空间分辨率和高灵敏度对于医学成像仪器至关重要。超快磁共振成像(MRI)、超声成像、低剂量CT、正电子发射型计算机断层显像(PET)、超光学衍射极限的显微成像仪器都是人们研究的目标。
(2) 发展多尺度、多模态、多参数的在体测量技术。凭单一生理指标的变化难以全面判断肿瘤病理生理状态,亟须一种能够同时进行多病理生理参数综合评价的成像仪器。可以同时对多个生理参数成像的多示踪剂 PET 成像仪器和指纹 MRI 技术是发展方向之一,而多色荧光成像仪器可以实现多个结构的同时显像。
(3) 发展融入人工智能的新型成像仪器。人工智能自出现以来,经历了 2 次低谷、3 次浪潮, 随着算法、算力和大数据的发展,人工智能尤其是机器学习的算法迅速发展,其中深度学习作为机器学习的领域之一,发展更为迅猛。成像仪器必将与人工智能深度结合,出现新一代成像仪器。2020 年,浙江大学光电科学与工程学院和美国国立卫生研究院联合在 Nature Biotechnology 在线发表题为“Rapid image deconvolution and multiview fusion for optical microscopy”的研究论文,提出荧光显微镜图像去卷积和多视角图像融合新技术, 使荧光显微镜图像后处理效率提高数十甚至上千倍。论文发表 1 个月后,该技术被评为世界显微成像技术十大进展之一。
(4) 发展新原理成像仪器,向人们无法触及的领域迈进。2016 年,Nature 发表偏振核成像技术, 它利用 MRI 技术实现核成像,使得图像既有核医学图像的功能信息,也有 MRI 成像的高分辨特性。
“ 多尺度时空超分辨医学成像仪器”工程研究前沿中核心论文的主要产出国家分布情况见表1.2.5。美国医学成像仪器研究基础雄厚,核心论文占全球一半以上;德国核心论文占全球近 15%; 瑞士、法国、意大利和英国平分秋色。中国的国际合作对象主要是美国(见图 1.2.3)。表 1.2.6 表明核心论文产出机构也比较集中,核心论文达到 4 篇的机构中,除瑞士保罗谢勒研究所外,其余均是医学成像领域的著名大学,包括哈佛大学、麻省理工学院、苏黎世联邦理工学院、加州大学伯克利分校和加州大学戴维斯分校。核心论文产出机构联系方面呈现有趣现象,瑞士的两家研究机构——苏黎世联邦理工学院与瑞士保罗谢勒研究所合作最为紧密(见图 1.2.4)。施引核心论文数量(见表 1.2.7 和1.2.8),美国占比超过 30%,中国也有不俗表现, 超过 14%,德国超过 10%,其他产出国分布基本相当,表明中国在医学成像领域追赶势头明显。
1.2.3 边缘计算
针对现有云计算模型存在的实时性低、安全性差、能耗高等问题,设计出一套以边缘计算与云边协同调度为核心,面向海量边缘侧数据实时处理技术,是边缘计算技术研究亟待解决的关键问题。近年来边缘计算在学术界、工业界得到广泛关注。2016 年 ACM 和 IEEE 联合资助并发起边缘计算国际研讨会 ACM/IEEE Symp on Edge Computing (SEC)。亚马逊于 2017 年发布 Greengrass 平台,支持在边缘侧部署机器学习服务,随后云平台提供商谷歌公司、微软公司、阿里云计算有限公司、百度相继发布各自的边缘计算软硬件平台。开源软件项目 EdgeX、KubeEdge 等积极推进,在开源社区、学术界、工业界产生重要影响。
《表 1.2.5》
表 1.2.5 “多尺度时空超分辨医学成像仪器”工程研究前沿中核心论文的主要产出国家
| 序号 | 国家 | 核心论文数 | 论文比例 | 被引频次 | 篇均被引频次 | 平均出版年 |
| 1 | 美国 | 63 | 52.50% | 3478 | 55.21 | 2015.6 |
| 2 | 德国 | 17 | 14.17% | 1192 | 70.12 | 2015.5 |
| 3 | 瑞士 | 11 | 9.17% | 881 | 80.09 | 2015.9 |
| 4 | 法国 | 10 | 8.33% | 443 | 44.3 | 2016 |
| 5 | 意大利 | 9 | 7.50% | 402 | 44.67 | 2015.8 |
| 6 | 英国 | 9 | 7.50% | 398 | 44.22 | 2015.4 |
| 7 | 荷兰 | 8 | 6.67% | 615 | 76.88 | 2015.4 |
| 8 | 澳大利亚 | 8 | 6.67% | 314 | 39.25 | 2015.4 |
| 9 | 西班牙 | 7 | 5.83% | 728 | 104 | 2016 |
| 10 | 中国 | 7 | 5.83% | 467 | 66.71 | 2015.3 |
《表 1.2.6》
表 1.2.6 “多尺度时空超分辨医学成像仪器”工程研究前沿中核心论文的主要产出机构
| 序号 | 机构 | 核心论文数 | 论文比例 | 被引频次 | 篇均被引频次 | 平均出版年 |
| 1 | 苏黎世联邦理工学院 | 7 | 5.83% | 633 | 90.43 | 2015.7 |
| 2 | 麻省理工学院 | 7 | 5.83% | 400 | 57.14 | 2015.7 |
| 3 | 瑞士保罗谢勒研究所 | 4 | 3.33% | 237 | 59.25 | 2015.5 |
| 4 | 加州大学伯克利分校 | 4 | 3.33% | 202 | 50.5 | 2016.2 |
| 5 | 哈佛大学 | 4 | 3.33% | 179 | 44.75 | 2015.8 |
| 6 | 加州大学戴维斯分校 | 4 | 3.33% | 175 | 43.75 | 2016 |
| 7 | 西班牙国家研究委员会 | 3 | 2.50% | 327 | 109 | 2017.3 |
| 8 | 加州理工学院 | 3 | 2.50% | 240 | 80 | 2015.7 |
| 9 | 得克萨斯大学奥斯汀分校 | 3 | 2.50% | 228 | 76 | 2016 |
| 10 | 日内瓦大学 | 3 | 2.50% | 204 | 68 | 2016.3 |
《图 1.2.3》

图 1.2.3 “多尺度时空超分辨医学成像仪器”工程研究前沿主要国家间的合作网络
《图 1.2.4》
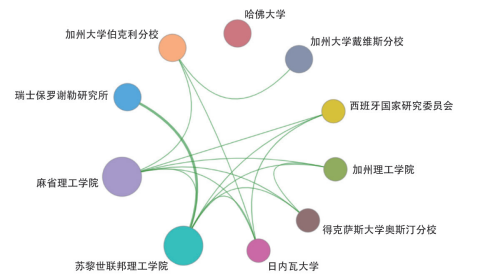
图 1.2.4 “多尺度时空超分辨医学成像仪器”工程研究前沿主要机构间的合作网络
《表 1.2.7》
表 1.2.7 “多尺度时空超分辨医学成像仪器”工程研究前沿中施引核心论文的主要产出国家
| 序号 | 国家 | 施引核心论文数 | 施引核心论文比例 | 平均施引年 |
| 1 | 美国 | 2229 | 30.48% | 2017.8 |
| 2 | 中国 | 1060 | 14.49% | 2018.3 |
| 3 | 德国 | 870 | 11.89% | 2017.9 |
| 4 | 英国 | 673 | 9.20% | 2017.9 |
| 5 | 法国 | 524 | 7.16% | 2018 |
| 6 | 澳大利亚 | 343 | 4.69% | 2018 |
| 7 | 加拿大 | 343 | 4.69% | 2018.1 |
| 8 | 意大利 | 336 | 4.59% | 2017.8 |
| 9 | 瑞士 | 324 | 4.43% | 2017.9 |
| 10 | 荷兰 | 320 | 4.38% | 2017.9 |
《表 1.2.8》
表 1.2.8 “多尺度时空超分辨医学成像仪器”工程研究前沿中施引核心论文的主要产出机构
| 序号 | 机构 | 施引核心论文数 | 施引核心论文比例 | 平均施引年 |
| 1 | 中国科学院 | 214 | 17.48% | 2018.2 |
| 2 | 加州理工学院 | 139 | 11.36% | 2018 |
| 3 | 南洋理工大学 | 130 | 10.62% | 2018.1 |
| 4 | 哈佛大学 | 121 | 9.89% | 2017.8 |
| 5 | 麻省理工学院 | 102 | 8.33% | 2018 |
| 6 | 斯坦福大学 | 90 | 7.35% | 2017.7 |
| 7 | 多伦多大学 | 90 | 7.35% | 2017.7 |
| 8 | 伊利诺伊大学 | 88 | 7.19% | 2017.8 |
| 9 | 中国科学院大学 | 87 | 7.11% | 2018.5 |
| 10 | 加州大学伯克利分校 | 83 | 6.78% | 2017.8 |
边缘计算技术研究主要围绕以下 4 个方向开展:
(1) 边缘计算系统平台。边缘计算环境具有软硬件异构性强、可靠性低、资源受限等特点,现有的云计算软件架构难以满足可靠性、实时性、动态性等应用需求。因此,需要面向不同应用场景针对性地设计边缘计算系统平台,并攻克边缘服务灵活定制、分布式计算资源高效利用、高实时高可靠等关键问题。
(2) 云边任务协同调度机制。云计算、边缘计算各有优缺点。云计算算力强、可靠性高,边缘计算实时性、安全性高。云边协同计算可以结合两种计算模式的优点。此外,边缘侧设备异构性强, 计算、存储能力等各不相同,因此边缘计算系统需要根据计算任务类型、边缘设备计算能力、网络带宽情况等条件进行云边协同调度,从而提高系统运行效率。在云中心和边缘设备之间实现任务协同调度,实现无缝、高效的计算迁移,是关键研究问题。
(3) 边缘智能算法。如何在资源相对受限的边缘设备高效实现人工智能、机器学习算法是一个挑战。因此,重点开展边缘智能算法自适应优化机制研究,在维持算法精度的前提下,有效降低智能算法的计算资源开销,同时按需设计场景相关智能
算法。
(4) 边缘计算创新应用。边缘计算技术发展离不开重要、关键性应用。以边缘计算系统平台为基础,以云边协同调度、边缘智能算法等为关键技术,结合具体应用场景,实现智能视频监控、自动驾驶汽车、智能工厂、智能建筑结构监测等一系列边缘计算关键应用,通过具体应用场景完善边缘计算系统架构、突破一系列关键技术,并进一步发现潜在的挑战与机遇。
“边缘计算”工程研究前沿中核心论文的主要产出国家分布情况见表 1.2.9。边缘计算研究在学术界和工业界得到广泛关注,中国核心论文数量占全球近 50%。美国核心论文占全球近 30%,英国、加拿大各占 10% 左右。中国的国际合作对象主要是美国、英国与加拿大,其他国家之间的合作比较均衡(见图 1.2.5)。核心论文产出机构也比较集中(见表 1.2.10 和图 1.2.6),施引论文数量方面(见表 1.2.11),中国占比近 40%。排名前 10 位的施引论文产出机构中,9 家来自中国(见表 1.2.12), 表明中国对边缘计算关注度颇高。其中北京邮电大学、西安电子科技大学与华中科技大学均以移动边缘计算作为核心研究方向,同时兼顾边缘计算在具体场景如车联网、智能视频处理中的应用研究。
《表 1.2.9》
表 1.2.9 “边缘计算”工程研究前沿中核心论文的主要产出国家
| 序号 | 国家 | 核心论文数 | 论文比例 | 被引频次 | 篇均被引频次 | 平均出版年 |
| 1 | 中国 | 234 | 47.56% | 15171 | 64.83 | 2018 |
| 2 | 美国 | 135 | 27.44% | 10674 | 79.07 | 2017.5 |
| 3 | 英国 | 60 | 12.20% | 3594 | 59.9 | 2017.4 |
| 4 | 加拿大 | 53 | 10.77% | 3201 | 60.4 | 2017.6 |
| 5 | 韩国 | 31 | 6.30% | 2668 | 86.06 | 2017.3 |
| 6 | 意大利 | 30 | 6.10% | 1211 | 40.37 | 2017 |
| 7 | 芬兰 | 28 | 5.69% | 1976 | 70.57 | 2017.2 |
| 8 | 澳大利亚 | 28 | 5.69% | 1905 | 68.04 | 2017.5 |
| 9 | 印度 | 27 | 5.49% | 1250 | 46.3 | 2017.5 |
| 10 | 德国 | 26 | 5.28% | 2356 | 90.62 | 2016.3 |
《表 1.2.10》
表 1.2.10 “边缘计算”工程研究前沿中核心论文的主要产出机构
| 序号 | 机构 | 核心论文数 | 论文比例 | 被引频次 | 篇均被引频次 | 平均出版年 |
| 1 | 北京邮电大学 | 28 | 5.69% | 1480 | 52.86 | 2017.8 |
| 2 | 西安电子科技大学 | 23 | 4.67% | 1270 | 55.22 | 2018.2 |
| 3 | 华中科技大学 | 18 | 3.66% | 1070 | 59.44 | 2018.2 |
| 4 | 沙特阿拉伯国王大学 | 18 | 3.66% | 657 | 36.5 | 2018.2 |
| 5 | 大连理工大学 | 17 | 3.46% | 968 | 56.94 | 2018.2 |
| 6 | 电子科技大学 | 16 | 3.25% | 985 | 61.56 | 2018.1 |
| 7 | 奥斯陆大学 | 15 | 3.05% | 1397 | 93.13 | 2018 |
| 8 | 南京大学 | 15 | 3.05% | 1285 | 85.67 | 2018.2 |
| 9 | 阿尔托大学 | 14 | 2.85% | 1105 | 78.93 | 2017.3 |
| 10 | 广东工业大学 | 14 | 2.85% | 833 | 59.5 | 2018.1 |
《图 1.2.5》
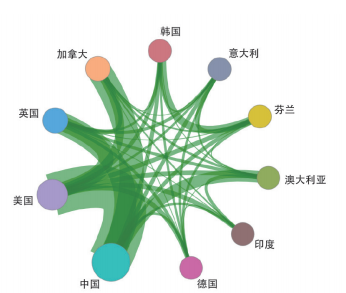
图 1.2.5 “边缘计算”工程研究前沿主要国家间的合作网络
《图 1.2.6》
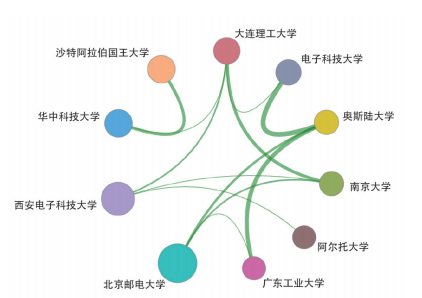
图 1.2.6 “边缘计算”工程研究前沿主要机构间的合作网络
《表 1.2.11》
表 1.2.11 “边缘计算”工程研究前沿中施引核心论文的主要产出国家
| 序号 | 国家 | 施引核心论文数 | 施引核心论文比例 | 平均施引年 |
| 1 | 中国 | 6559 | 39.83% | 2018.9 |
| 2 | 美国 | 2738 | 16.63% | 2018.7 |
| 3 | 英国 | 1201 | 7.29% | 2018.7 |
| 4 | 加拿大 | 1006 | 6.11% | 2018.7 |
| 5 | 印度 | 932 | 5.66% | 2018.7 |
| 6 | 韩国 | 870 | 5.28% | 2018.8 |
| 7 | 意大利 | 774 | 4.70% | 2018.6 |
| 8 | 澳大利亚 | 693 | 4.21% | 2018.9 |
| 9 | 西班牙 | 602 | 3.66% | 2018.6 |
| 10 | 德国 | 581 | 3.53% | 2018.4 |
《表 1.2.12》
表 1.2.12 “边缘计算”工程研究前沿中施引核心论文的主要产出机构
| 序号 | 机构 | 施引核心论文数 | 施引核心论文比例 | 平均施引年 |
| 1 | 北京邮电大学 | 633 | 20.77% | 2018.7 |
| 2 | 中国科学院 | 382 | 12.54% | 2018.8 |
| 3 | 西安电子科技大学 | 287 | 9.42% | 2019 |
| 4 | 电子科技大学 | 264 | 8.66% | 2018.9 |
| 5 | 清华大学 | 260 | 8.53% | 2018.8 |
| 6 | 华中科技大学 | 240 | 7.88% | 2018.9 |
| 7 | 沙特阿拉伯国王大学 | 236 | 7.75% | 2019.1 |
| 8 | 东南大学 | 203 | 6.66% | 2018.9 |
| 9 | 浙江大学 | 189 | 6.20% | 2018.8 |
| 10 | 上海交通大学 | 181 | 5.94% | 2018.7 |
《2 工程开发前沿》
2 工程开发前沿
《2.1 Top 10 工程开发前沿发展态势》
2.1 Top 10 工程开发前沿发展态势
信息与电子工程领域 Top 10 工程开发前沿见表 2.1.1,涉及电子科学与技术、光学工程与技术、仪器科学与技术、信息与通信工程、计算机科学与技术、控制科学与技术等学科方向。其中,“用于集成电路芯片纳米光刻的 EUV 光源开发”“无线通信与感知一体化技术”“智能机器人集群协作系统设计与实现”“太赫兹核心器件及超高速无线应用”这 4 项来自专家独立推荐,其余 6 项来自德温特专利数据库分析提炼,经专家研判获得。各开发前沿涉及的核心专利 2014—2019 年公开情况见表 2.1.2。
(1) 用于集成电路芯片纳米光刻的 EUV 光源开发
半导体集成电路芯片作为高端制造业皇冠上的明珠,深刻影响着现代人类生活的方方面面。按照摩尔定律,集成电路芯片最小节点线宽已达到1 nm。作为影响节点尺寸的重要因素,光刻光源的波长起到至关重要的作用。目前,主流光刻机采用深紫外光源(DUV),通过多次曝光可达到 7 nm
《表 2.1.1》
表 2.1.1 信息与电子工程领域 Top 10 工程开发前沿
| 序号 | 工程开发前沿 | 公开量 | 引用量 | 平均被引数 | 平均公开年 |
| 1 | 用于集成电路芯片纳米光刻的 EUV 光源开发 | 121 | 980 | 8.1 | 2014.4 |
| 2 | 无线通信与感知一体化技术 | 299 | 1113 | 3.72 | 2016.4 |
| 3 | 智能机器人集群协作系统设计与实现 | 243 | 1094 | 4.5 | 2016.2 |
| 4 | 虚拟现实 / 增强现实近眼显示技术 | 156 | 1869 | 11.98 | 2017.5 |
| 5 | 用于精密测量与时间计量的光梳技术 | 156 | 573 | 3.67 | 2016.2 |
| 6 | 大规模天线阵列与射频一体化技术 | 158 | 843 | 5.34 | 2016.9 |
| 7 | 智能移动机器人自主环境感知与场景认知 | 70 | 71 | 1.01 | 2017.5 |
| 8 | 全固态车载相控阵激光雷达 | 47 | 367 | 7.81 | 2018.2 |
| 9 | 太赫兹核心器件及超高速无线应用 | 145 | 534 | 3.68 | 2016.3 |
| 10 | 基于区块链的分布式网络安全与管理 | 125 | 332 | 2.66 | 2018.5 |
《表 2.1.2》
表 2.1.2 信息与电子工程领域 Top 10 工程开发前沿核心专利逐年公开量
| 序号 | 前沿名称 | 2014 年 | 2015 年 | 2016 年 | 2017 年 | 2018 年 | 2019 年 |
| 1 | 用于集成电路芯片纳米光刻的 EUV 光源开发 | 24 | 20 | 21 | 10 | 4 | 9 |
| 2 | 无线通信与感知一体化技术 | 24 | 28 | 46 | 51 | 59 | 58 |
| 3 | 智能机器人集群协作系统设计与实现 | 4 | 9 | 8 | 26 | 46 | 66 |
| 4 | 虚拟现实 / 增强现实近眼显示技术 | 7 | 9 | 22 | 25 | 38 | 52 |
| 5 | 用于精密测量与时间计量的光梳技术 | 13 | 20 | 19 | 21 | 22 | 36 |
| 6 | 大规模天线阵列与射频一体化技术 | 18 | 15 | 24 | 21 | 36 | 38 |
| 7 | 智能移动机器人自主环境感知与场景认知 | 1 | 7 | 8 | 9 | 32 | 13 |
| 8 | 全固态车载相控阵激光雷达 | 1 | 2 | 2 | 5 | 9 | 28 |
| 9 | 太赫兹核心器件及超高速无线应用 | 16 | 15 | 17 | 18 | 39 | 23 |
| 10 | 基于区块链的分布式网络安全与管理 | 0 | 0 | 1 | 12 | 33 | 79 |
节点线宽。最新一代极紫外(EUV)光刻机可以通过单次曝光方式实现 7 nm 光刻,通过工艺改进甚至可实现 1 nm 的节点线宽。因此,EUV 光刻机在节点线宽、效率以及成品率方面都远胜于 DUV 光刻机,这也使得 EUV 光源的研制成为新一代大规模产业应用光刻机的关键。
EUV 是波长为10~121 nm 的极端紫外线辐射。目前,获得EUV 光源主要有激光等离子体(LPP) 和放电等离子体(DPP)两种途径。LPP 主要通过Nd:YAG 激光器产生预脉冲轰击液滴状锡(Sn)靶, 形成亚微米级薄雾,再由万瓦级 CO2 激光器输出的主脉冲激光轰击亚微米级 Sn 滴,形成高温、高密度的等离子体,产生 EUV 辐射。相较于 DPP, 该途径不会损坏电极,所产生的光学碎屑量相对较少。这使得 LPP 成为目前 EUV 光源产生的主流方案。
集成电路芯片加工精度对于 EUV 光源性能的要求越来越高。对于 3 nm 集成电路芯片纳米光刻的技术节点,EUV 光源的功率需要提高到千瓦级别。此外,金属 Gd 靶材的应用以及对自由电子激光的研究有望获得更短波长、更高功率的 EUV 光源输出,从而突破纳米光刻的更小节点。
(2) 无线通信与感知一体化技术
无线通信与感知一体化技术是通过共用无线通信系统基础设施和时 – 频 – 空资源,对通信和感知领域先进技术在硬件架构和算法层面高度融合,利用高速率、低时延无线通信系统的信息交互能力, 实现通信与感知的协同,打破传统各自为营格局, 实现通信和感知的联合设计,达成无线通信与感知一体化系统超高速率、超低时延、超强可靠性等通信需求,并延伸其厘米级精度定位和超高细粒度感知的能力。无线通信与感知一体化技术已成为通信系统演进、产业技术变革及智慧社会升级的新动能。
无线通信与感知一体化技术领域的研发尚处于起步阶段。主流方向侧重于把握无线通信系统大规模天线阵列、超密集组网、新型多址接入、全频谱等技术带来的新机遇,建立通信与感知的协作与共生,以最大化频谱效率降低硬件成本。立足基础和现状,未来无线通信与感知一体化技术的主要研究方向为:构建通信定位感知成像一体化的多层次、多功能、智能化网络;建立高动态移动性场景下通信与感知的交互耦合、协作互助机制;研究适用于高维度、大规模、超异构的信息融合和资源协同技术。
(3) 智能机器人集群协作系统设计与实现
智能机器人集群协作系统是由大量具有一定自主能力的机器人围绕共同目标协同完成作业任务的复杂系统,常见于机器人集群协同生产制造、码头与仓储物流、无人系统集群协同区域搜索等应用场景。通常从机器人集群的体系架构、作业环境和任务使命 3 个方面区分不同类型的系统。机器人可以异构或同构甚至跨域组合,例如无人机和无人车的空地协同可实现高效的目标搜索。根据任务和环境要素的差异,智能机器人集群协作系统的体系架构、协作关系、网络拓扑、控制方式等可能存在显著差异。例如,车间作业环境便于布设通信网络, 从而支撑调度中心与机器人以及机器人之间的信息互联互通;野外环境作业机器人之间则主要通过自组移动无线网络实现信息交互与共享。智能机器人集群协作系统主要技术方向包括:集群体系架构设计、通信与组网技术、感知与导航定位技术、任务规划与决策技术、机器人协同运动与操作控制技术等。一方面,随着集群规模和作业空间的扩大,感知、规划、决策、控制等方面都呈现分布化的发展趋势;另一方面,为满足多样化的复杂任务要求, 具备较高的环境适应性,机器人的集群协同作业仍将保持智能化和自主化的发展趋势,在执行各种复杂任务时将具有更高的自组织协作能力和更高的作业效率。
(4) 虚拟现实 / 增强现实近眼显示技术
虚拟现实 / 增强现实(VR/AR)近眼显示设备被认为是未来个人移动设备的显示终端。近眼显示根据人眼是否可光学透视显示设备,被分为 VR(不可透视)和 AR(可透视)两种。近眼显示设备通常包含微显示芯片、成像光学系统、头部跟踪设备等。微显示芯片主要涉及硅基液晶(LCOS)、数字光处理器(DLP)、有机发光显示(OLED) 以及微发光二极管(Micro-LED)等技术。成像光学系统包含微投影光机、光学波导、自由曲面元件等光学技术。头部跟踪涉及同步定位与地图构建(Slam)技术。
近眼显示主要朝着轻巧、高分辨、高亮度、大视场角方向发展,涉及的关键技术包括:在显示芯片方面,发展高分辨、高亮度的 LCOS、Micro-LED、OLED、激光扫描等显示技术;在光学成像方面,波导技术是目前接近普通眼镜形式的主要技术手段,主要发展浮雕光栅波导、全息波导以及液晶聚合物光栅波导等技术,实现高均匀性、高效率的图像传输;研究折叠式光学系统、视场拼接光学技术、自由曲面成像技术、全息元件成像技术, 实现超薄、大视场的近眼显示;探索光场近眼显示技术、变焦透镜技术,以及近眼全息显示技术等, 实现多焦面或连续焦面的近眼显示,解决近眼显示立体视觉中人眼辐辏聚焦冲突造成的晕眩问题。
(5) 用于精密测量与时间计量的光梳技术
光学频率梳(简称光梳)产生一系列均匀间隔且具有相干稳定相位关系的梳齿光谱,其中心频率在光学波段,梳齿间隔在微波波段,是光和微波间的重要桥梁,可实现极其精准的时频基准,大幅提升精密测量与时间计量精度。
基于光梳技术的光频原子钟(简称光钟)对频率/ 时间测量的不确定度已达 10–18 量级,由此,时间成为测量精度最高的物理量。光梳技术还在引力波探测、基本物理常量测试、阿秒超快科学等基础研究领域和超宽带通信、低噪声微波光子源、超精确谱分析等应用研究领域有重要应用前景。
目前,高稳定(自锁定)光梳技术主要包括基于飞秒锁模技术的激光频率梳、基于电光调制技术的电光频率梳和基于微型谐振腔的新型光梳等。其中激光频率梳已商业化,但构造复杂、成本昂贵, 限制了其大规模应用。电光频率梳噪声抑制技术尚不成熟,离工程应用还有相当距离。新型光梳中, 基于片上微环和光纤微法珀结构等高 Q 值光学微腔的克尔光梳技术能够在实现自参考锁定的同时保持非常低的噪声,且尺度紧凑、结构简单,可在超低功耗下工作,与CMOS/ 全光纤接入等工艺兼容, 有望实现芯片级大规模生产和系统级大规模应用。目前,美国 DARPA 和欧盟 Horizon 2020 计划都正在大力发展这种微腔光梳技术,希望占领这个精确测量和时间计量技术的制高点,引领导航定位、精密计量、高速通信和智能感知等领域的跨代发展。
(6) 大规模天线阵列与射频一体化技术
在 5G 基站中,由于大规模天线阵列技术的应用,天线从无源变为有源,与射频单元合并为一体化有源天线。一体化天线具备较好的可靠性和稳定性,与普通天线相比,在减小馈缆接头损坏、美化天线外观、安装维护便捷性等方面具有一定优势; 在 5G 终端侧,由于通信协议越来越复杂,需要的多输入多输出天线阶数随之增加,而终端设备始终朝着小型化、轻薄化、集成化方向发展,因此,天线和射频的集成度越来越高。
在大规模天线与射频一体化演进过程中,有以下技术趋势:①实际应用场景中,天线设计尺寸被压缩,而天线数目及其工作频段增多,需要紧凑的大规模天线阵列的共口径和去耦合设计。②天线与无源馈电网络和器件以及有源放大器整合,出现无(电)缆天线振子、天线滤波单元、塑料振子、有源天线等一系列新形态多天线系统,以提高集成度, 减小馈电损耗。③在毫米波频段,出现了封装和芯片天线,在高频率下天线(阵)体积明显缩小至封装乃至芯片级,出现大量基于硅基、碳基的新型天线阵列,通过先进的集成电路工艺和封装技术,实现与有源射频芯片乃至基带芯片的集成化封装,促使天线逐渐变成片上器件。④随着频率提高,设备射频前端和天线阵子高度集成,由于待测件可能不存在测试射频接口,以往能够通过传导法测试的项目(如发射机和接收机),现在需要通过空口进行,此外,在研发和封测环节,需要对芯片级或 PCB 级天线作空口测试。大规模天线阵列单元数目成百上千,传统射频性能和辐射性能测试效率亟须提高,以便快速得到多个端口的无源、有源参数。由于基站侧出现有源天线,其性能量测方式也值得关注。
(7) 智能移动机器人自主环境感知与场景认知
智能移动机器人根据自身搭载的多传感器系统对所处动态环境进行多模态信息获取,并提取环境中有效特征信息加以处理和理解,最终通过建立所在环境的模型来认知所在场景的信息,保证移动机器人在长期运行中具有良好的环境自适应能力,进而更好地完成自主定位、环境探索与自主导航等基本任务。智能移动机器人在军事、工业、农业、商业、交通、物流等领域有着广泛的应用前景,如在抗击新冠疫情工作中,为减少人与人的接触,在医疗、配送、巡检等领域,拥有自主移动技术的服务机器人贡献巨大。
智能移动机器人自主环境感知与场景认知技术的未来研究方向主要包括:①深度融合多元感知数据,构建覆盖所有空间和时间的检测系统,提高感知系统的能力,为智能移动机器人提供更可靠的决策依据。②利用迁移学习将从有限数据集训练获得的知识迁移到开放环境的不同场景和不同任务中, 有效增强移动机器人的长期自主环境适应能力。③对物体与物体间、物体与场景间的关联进行挖掘与分析,使机器人获得场景类别层面的认知,进而针对性地选取与场景认知结果对应的模型与参数, 用于重定位与场景理解等任务。④能够自动从海量的多源异构数据中抽取知识构建关系,理解高层语义信息,并与应用场景有效结合,实现移动机器人从感知智能到认知智能的跨越。
(8) 全固态车载相控阵激光雷达
激光雷达是指利用发射和接收激光光束完成障碍物探测和测距的系统,由于具有长程和高精度探测的特点,是实现三维感知的一种重要技术方式。激光雷达主要面向汽车无人自动驾驶、机器人、地理测绘以及大气探测等领域,其中,汽车无人自动驾驶领域是激光雷达面向的一个关键市场。激光雷达作为自动驾驶系统感知端中最重要的传感器,主要包含两个核心作用:①通过激光光束扫描得到汽车周围环境的三维模型,运用相关算法准确探测周围的车辆和行人;②将实时全局地图与高精度地图比对,实现导航及提升车辆定位精度。
激光雷达的图像映射方法主要包括机械旋转扫描和固态扫描两种方式。目前市场上大部分激光雷达系统均采用旋转机械装置实现光束扫描,代表产品有 Velodyne 的 HDL-64E 和 HDL-32E,知名无人驾驶汽车制造商(如 Google、百度、沃尔沃等) 均采用其激光雷达产品。整个扫描装置按照一定速率旋转,在旋转过程中不断发射和探测激光脉冲。机械旋转扫描机制由于固有的局限性,限制了光束扫描速率,降低了实用性并且增加了系统的复杂程度和成本。近年来,人们开始重点关注另外一种激光雷达技术,即全固态光束扫描系统。其内部没有宏观运动部件,因此具有较好的耐久性和可靠性, 顺应了自动驾驶对激光雷达固态化、小型化和低成本的要求。
作为实现全固态光束扫描的一种主要方案,光学相控阵列(OPA)由若干发射接收单元组成阵列, 通过外部电学控制,可以独立控制不同单元发射光波的特性(如光强、相位)。基于相干光的干涉效应, 通过调谐阵列中不同单元的相位和振幅分布,可以在指定方向上实现多光束干涉增强,而在其他方向干涉相消,进而实现光束扫描。OPA 实现方式和材料平台有多种。早期基于 AlGaAs 波导阵列的方案无法实现较大的拉格朗日不变量,从而扫描角度过小。而基于液晶技术的相控阵在大角度下偏转效率较低,且响应时间一般在毫秒量级,无法满足如无人自动驾驶等特定应用场景的要求。由于与 CMOS 工艺的兼容特性,硅基光子集成技术为芯片尺度的固态激光雷达系统提供了一个低成本技术方案。近年来,作为固态激光雷达系统的核心组件,硅基集成OPA 由于具备固态光束扫描能力而被广泛研究。硅基集成 OPA 具有扫描速度快(兆赫兹量级)、指向精度高(0.1° 量级)、可控性好(除对目标区域高密度扫描外,在其他区域也能稀疏扫描)等优点。对比目前硅基集成 OPA 发展现状和实际应用需求,仍然存在很多关键的技术难题有待突破,未来发展方向主要表现为以下几个方面:①在光源方面,将激光光源的产生、调制以及放大等过程与光学相控阵列封装集成到单个芯片中;②在光操控方面,解决高密度波导阵列中相邻天线间的串扰问题, 突破高调制效率、低插损、低振幅啁啾、高速的片上相位调制技术,在水平和竖直两个方向上满足要求的视场范围以及角度分辨率;③在探测方面,需解决背景杂散光的干扰、目标反射光的定向性以及片上微弱光信号探测等一系列问题。
(9) 太赫兹核心器件及超高速无线应用
太赫兹核心器件及超高速无线应用包括两个内涵:太赫兹频段核心功能器件以及太赫兹高速通信。
太赫兹频段核心功能器件主要包括太赫兹频段的混频器、放大器、倍频器、调制器、天线导波结构及信道化组件等。太赫兹高速通信是以太赫兹信号作为载波的通信、数据传输和组网互联等,其主要应用方向为空间高速通信、航空海量数据传输以及后 5G 或 6G 时期的回传链路。随着人类社会信息化程度加剧,数据显示家庭平均接入宽带速率已达30 Mb/s,移动 4G 终端的普及使得个人移动网络平均接入速率已达 100 Mb/s,因此未来巨量数据的传输和无缝的空、天、地覆盖都将成为技术驱动力。当前,太赫兹通信技术虽已初步具备应用的技术条件,但是系统成本较高,需攻关并突破低成本、量产化和集成化的太赫兹通信系统技术。因此,太赫兹通信集成化和单片化系统技术、太赫兹高功率高效率核心部组件技术、太赫兹智能波束技术、太赫兹频段高鲁棒性自适应捕获跟踪技术等都是未来亟待突破的技术。伴随上述技术的突破,太赫兹通信技术的商用普及时代越来越近。综上,太赫兹通信技术的发展趋势可以概括为:更高频段、更高速率、更小体积、更低功耗、更低成本、空天地无缝互联。
(10) 基于区块链的分布式网络安全与管理
基于区块链的分布式网络安全与管理是在对等网络中,利用区块链技术将地域分散、地位平等且规则明确的大量网络节点,构建一套可信、透明、自治的网络运行及数据信息安全防护体系,实现网络安全与管理理念从单点到体系的跃升。该体系下, 节点不再是孤点,而是规则下的自主协同单元;每个节点既有自我防护能力,同时也输入和输出安全服务;任何一个节点自身的不安全状态,不会传播到其他节点,有效阻断内外威胁。主要技术方向包括体系化协同防护、可信身份验证、访问控制与权限管理、数据确权与安全、隐私保护等,融合区块链技术在网络架构、共识规则、智能合约、数据管理等方面的优势,解决网络安全与管理面临的难题。其发展趋势有两大方向,一是面向用户提供应用服务,解决垂直应用领域的安全问题,例如针对物联网应用场景,提供身份管理、时间戳服务、数据防护、单点容错等解决方案;二是面向硬件设施提供基础协议或算法,提升底层安全防护能力。
《2.2 Top 3 工程开发前沿重点解读》
2.2 Top 3 工程开发前沿重点解读
2.2.1 用于集成电路芯片纳米光刻的 EUV 光源开发
EUV 光源作为光刻机的核心组成部分,其更短的波长可以有效减小集成电路芯片的节点线宽。目前,商用 EUV 光刻机主要采用 LPP 光源。EUV- LPP 主要由主脉冲激光器、预脉冲激器、光束传输系统、Sn 液滴靶、Sn 回收器、收集镜、靶室等构成。主脉冲激光器通常采用结合多级放大器的高功率CO2 激光器。激光器产生的主脉冲和预脉冲经光束传输系统后聚焦于收集镜的焦点,Sn 液滴靶产生的 20~30 μm 直径的液滴先后被预脉冲与主脉冲汇聚轰击,转化为高温 Sn 等离子体,辐射出 13.5 nm 的 EUV 光,经收集镜于中间焦点。
EUV 光源技术攻关的主要方向是寻找更短波长的靶材,更有效消除碎屑,获得更高的转换效率。值得关注的是,在寻找更短波长靶材的过程中,发现稀土元素 Gd 在 6.7 nm 处产生强的窄带共振辐射与元素 Sn 在 13.5 nm 处类似,很有可能成为未来6.7 nm 光源理想的燃料靶材,可大幅提高光刻精度。另一方面,碎屑问题作为大规模工业化生产过程不可忽视的问题之一,仍然是限制 EUV 光源转换效率的主要因素。当前去除碎屑的主要方法有两种: 一是采用双脉冲激光辐射,二是充入惰性气体或氢气与外加磁场相结合。此外,达到工业量产所需的光源功率和长时间稳定工作的要求,也是需要深入研究的问题。
用于集成电路芯片纳米光刻的 EUV 光源开发方向核心专利主要产出国家、主要产出机构、主要国家间合作网络分别见表 2.2.1、表 2.2.2 和图 2.2.1。
《表 2.2.1》
表 2.2.1 “用于集成电路芯片纳米光刻的EUV 激光光源开发”核心专利主要产出国家
| 序号 | 国家 | 公开量 | 公开量比例 | 被引数 | 被引数比例 | 平均被引数 |
| 1 | 日本 | 40 | 33.06% | 219 | 22.35% | 5.48 |
| 2 | 美国 | 26 | 21.49% | 663 | 67.65% | 25.5 |
| 3 | 中国 | 23 | 19.01% | 23 | 2.35% | 1 |
| 4 | 德国 | 16 | 13.22% | 70 | 7.14% | 4.38 |
| 5 | 荷兰 | 14 | 11.57% | 20 | 2.04% | 1.43 |
| 6 | 韩国 | 1 | 0.83% | 1 | 0.10% | 1 |
《表 2.2.2》
表 2.2.2 “用于集成电路芯片纳米光刻的EUV 激光光源开发”核心专利主要产出机构
| 序号 | 机构 | 国家 | 公开量 | 公开量比例 | 被引数 | 被引数比例 | 平均被引数 |
| 1 | 阿斯麦公司 | 荷兰 | 36 | 29.75% | 668 | 68.16% | 18.56 |
| 2 | 株式会社小松制作所 | 日本 | 14 | 11.57% | 180 | 18.37% | 12.86 |
| 3 | 卡尔·蔡司半导体仪器公司 | 德国 | 13 | 10.74% | 54 | 5.51% | 4.15 |
| 4 | 优志旺电机株式会社 | 日本 | 8 | 6.61% | 9 | 0.92% | 1.13 |
| 5 | 哈尔滨工业大学 | 中国 | 7 | 5.79% | 1 | 0.10% | 0.14 |
| 6 | 中芯国际集成电路制造 ( 上海 ) 有限公司 | 中国 | 6 | 4.96% | 12 | 1.22% | 2 |
| 7 | IHI 株式会社 | 日本 | 4 | 3.31% | 12 | 1.22% | 3 |
| 8 | 中国科学院光电研究所 | 中国 | 4 | 3.31% | 5 | 0.51% | 1.25 |
| 9 | 关西大学 | 日本 | 4 | 3.31% | 1 | 0.10% | 0.25 |
| 10 | 中国科学院上海光学精密机械研究所 | 中国 | 3 | 2.48% | 3 | 0.31% | 1 |
核心专利公开量和被引数排前 3 位的是日本、美国、中国,其中美国在被引数方面占据领先地位。国家间合作网络集中在美国、日本和德国。核心专利主要产出机构排名前 3 位的是阿斯麦公司、株式会社小松制作所和卡尔·蔡司半导体仪器公司。主要机构间无合作关系。
中国对 EUV 光刻技术的研究起步较晚,主要由中国科学院和部分高校的一些团队在进行相关研究工作。中国已有的技术积累和产业基础尚不成熟。我们需要积极借鉴和学习国外先进技术,集中优秀人才,组织相关团队,踏踏实实地在 EUV 光刻技术领域创新与发展。
2.2.2 无线通信与感知一体化技术
无线通信系统从 1G 到 5G 不断演进,不仅带
《图 2.2.1》
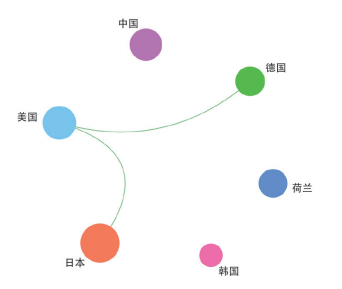
图 2.2.1 “用于集成电路芯片纳米光刻的 EUV 激光光源开发”主要国家间合作网络
来了通信能力质的飞跃,其感知精度也逐步增强, 无线通信与感知正在不断交叉、相互促进。随着大规模天线阵列、超密集组网、新型多址接入、全频谱等技术进一步发展,以及可重构智能超表面和人工智能等技术的使能,无线通信与感知一体化已成为无线通信和感知领域发展的引领方向。
无线通信与感知一体化技术是通过共用无线通信系统基础设施和时 – 频 – 空资源,以降低硬件成本,对通信和感知领域先进技术在硬件架构和算法层面高度融合,利用高速率、低时延无线通信系统的信息交互能力,实现通信与感知的协同,打破传统各自为营格局,实现通信和感知的联合设计,达成无线通信与感知一体化系统超高速率、超低时延、超强可靠性等通信需求,延伸其厘米级精度定位和超高细粒度感知的能力。
目前,无线通信与感知一体化技术的应用在车联网、智能交通和工业网络系统等领域不断涌现, 未来无线通信与感知一体化技术将进一步成为通信系统演进、产业技术变革、智慧社会升级的新动能。无线通信与感知一体化技术将围绕构建多层次、多功能、智能化的通信定位感知成像一体化网络展开, 揭示传输、感知、乃至控制之间相互制约和相辅相成的耦合关系,同步提升系统在通信和感知方面的整体性能,建立高动态移动性场景下通信与感知的交互耦合、协作互助机制,研究适用于高维度、大规模、超异构的信息融合和资源协同技术。
无线通信与感知一体化技术工程开发前沿中核心专利主要产出国家排名前 3 位的是中国、韩国和美国(见表 2.2.3)。核心专利主要产出机构排名前 3 位的是韩国的 LG 电子公司、美国的高通公司和韩国的三星电子公司(见表 2.2.4)。LG 电子公司的主要研究对象为移动终端与可穿戴智能设备、智能机器人、无线 IP 电视等方面;高通公司的研究集中于通过利用感知技术来对无线通信系统进行改善提升,包括对信道特征、信号特性等进行感知; 三星电子公司的研究方向则较为宽泛,涉及了无线通信与感知一体化技术在智能交通、智能家居与设备监测中的应用。主要机构间无合作关系。
2.2.3 智能机器人集群协作系统设计与实现
智能机器人集群协作系统的设计与开发涉及复杂的技术体系,以机器人单体技术为基础,以多系统、多层次、多学科综合集成为核心,依靠网络体系构建实现互联互通,依靠人工智能技术实现任务赋能,涉及机电系统、通信网络、运筹调度、人工智能、控制论等多学科知识的综合运用。常见于机器人集群协同生产制造、码头与仓储物流、无人系统集群协同搜索救援等应用场景,在我国智能制造与人工智能发展战略中具有非常重要的地位,是自主智能系统、群智能等人工智能前沿技术的重要载体。随着人工智能技术快速发展和通信网络技术不
《表 2.2.3》
表 2.2.3 “无线通信与感知一体化技术”工程开发前沿中核心专利的主要产出国家
| 序号 | 国家 | 公开量 | 公开量比例 | 被引数 | 被引数比例 | 平均被引数 |
| 1 | 中国 | 182 | 60.87% | 332 | 29.83% | 1.82 |
| 2 | 韩国 | 56 | 18.73% | 159 | 14.29% | 2.84 |
| 3 | 美国 | 27 | 9.03% | 480 | 43.13% | 17.78 |
| 4 | 日本 | 17 | 5.69% | 28 | 2.52% | 1.65 |
| 5 | 瑞典 | 3 | 1.00% | 7 | 0.63% | 2.33 |
| 6 | 芬兰 | 2 | 0.67% | 62 | 5.57% | 31 |
| 7 | 马来西亚 | 1 | 0.33% | 4 | 0.36% | 4 |
| 8 | 爱尔兰 | 1 | 0.33% | 1 | 0.09% | 1 |
| 9 | 德国 | 1 | 0.33% | 0 | 0.00% | 0 |
| 10 | 英国 | 1 | 0.33% | 0 | 0.00% | 0 |
《表 2.2.4》
表 2.2.4 “无线通信与感知一体化技术”工程开发前沿中核心专利的主要产出机构
| 序号 | 机构 | 国家 | 公开量 | 公开量比例 | 被引数 | 被引数比例 | 平均被引数 |
| 1 | LG 电子公司 | 韩国 | 13 | 4.35% | 31 | 2.79% | 2.38 |
| 2 | 高通公司 | 美国 | 11 | 3.68% | 347 | 31.18% | 31.55 |
| 3 | 三星电子公司 | 韩国 | 5 | 1.67% | 139 | 12.49% | 27.8 |
| 4 | 北京邮电大学 | 中国 | 3 | 1.00% | 28 | 2.52% | 9.33 |
| 5 | 国家电网公司 | 中国 | 3 | 1.00% | 25 | 2.25% | 8.33 |
| 6 | 爱立信公司 | 瑞典 | 3 | 1.00% | 7 | 0.63% | 2.33 |
| 7 | 电子科技大学 | 中国 | 3 | 1.00% | 5 | 0.45% | 1.67 |
| 8 | 丰田信息技术中心 | 日本 | 3 | 1.00% | 4 | 0.36% | 1.33 |
| 9 | 索尼公司 | 日本 | 3 | 1.00% | 0 | 0.00% | 0 |
| 10 | 电信科学技术研究院 | 中国 | 2 | 0.67% | 24 | 2.16% | 12 |
《图 2.2.2》
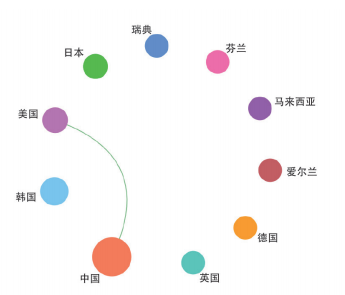
图 2.2.2 “无线通信与感知一体化技术”工程开发前沿的主要国家间合作网络
断进步,未来机器人自主能力和智能水平不断提升, 机器人集群规模增长,成本也会不断降低,高效的作业方式必将促进智能机器人集群协作系统的广泛应用,人类的生产生活方式都将发生重大变革。
智能机器人集群协作系统主要用于执行空间分布范围较大、作业环节和数量繁多的复杂任务,多见于生产制造、物流转运等领域,例如加工机器人和搬运机器人等异构机器人可构成机器人集群协同生产制造系统,显著提升生产效率和生产制造的自动化、智能化程度,而京东、菜鸟、亚马逊等电商企业已建立以搬运机器人为基本作业单元的智能仓储系统,显著提升了物流系统的运行效率。其他典型应用还包括无人机、无人车、无人艇等各种同构或异构无人系统集群协同执行区域搜索、目标探测等复杂任务。美国、俄罗斯、英国、法国等国家都制定了长期发展规划,深入开发各种机器人集群系统。随着集群规模和作业空间扩大以及应用范围不断拓展,机器人集群协同作业系统在体系架构、感知、规划、决策、控制等方面都呈现分布化、智能化、自主化的发展趋势。
本方向核心专利主要产出国家、主要产出机构及主要国家间合作网络分别见表 2.2.5、表 2.2.6 和图 2.2.3。核心专利公开量和被引数排名前 3 位的是中国、美国、日本,其中中国在专利公开量和被引数方面均占据绝对领先地位。核心专利主要产出机构排名前 3 位的是波音公司、杭州电子科技大学和西安电子科技大学,美国与沙特有少量合作,主要机构间无合作关系。中国的相关科研机构以高等院校为主,侧重多机器人协同路径规划、分布式运动控制等基础方法和技术,而美国、日本的科研机构主要是大型国际公司,其研究以特定工业领域的多机器人协作技术应用为主,例如美国波音公司的技术发明涉及多机器人协作进行工件表面操作、复杂作业环境下人机协作进行机身部件安装等实际作业任务,日本东芝公司的技术发明采用位移测量和外力估计等手段实现多机器人协同搬运货物的操作。
《表 2.2.5》
表 2.2.5 “智能机器人集群协作系统设计与实现”工程开发前沿中核心专利的主要产出国家
| 序号 | 国家 | 公开量 | 公开量比例 | 被引数 | 被引数比例 | 平均被引数 |
| 1 | 中国 | 85 | 75.89% | 122 | 47.47% | 1.44 |
| 2 | 美国 | 7 | 6.25% | 27 | 10.51% | 3.86 |
| 3 | 日本 | 6 | 5.36% | 66 | 25.68% | 11 |
| 4 | 韩国 | 3 | 2.68% | 20 | 7.78% | 6.67 |
| 5 | 沙特阿拉伯 | 3 | 2.68% | 9 | 3.50% | 3 |
| 6 | 德国 | 3 | 2.68% | 0 | 0.00% | 0 |
| 7 | 加拿大 | 1 | 0.89% | 15 | 5.84% | 15 |
| 8 | 意大利 | 1 | 0.89% | 1 | 0.39% | 1 |
| 9 | 法国 | 1 | 0.89% | 0 | 0.00% | 0 |
| 10 | 印度 | 1 | 0.89% | 0 | 0.00% | 0 |
《表 2.2.6》
表 2.2.6 “智能机器人集群协作系统设计与实现”工程开发前沿中核心专利的主要产出机构
| 序号 | 机构 | 国家 | 公开量 | 公开量比例 | 被引数 | 被引数比例 |
| 1 | 波音公司 | 美国 | 4 | 3.57% | 3 | 1.17% |
| 2 | 杭州电子科技大学 | 中国 | 3 | 2.68% | 5 | 1.95% |
| 3 | 西安电子科技大学 | 中国 | 3 | 2.68% | 2 | 0.78% |
| 4 | 顺德职业技术学院 | 中国 | 3 | 2.68% | 1 | 0.39% |
| 5 | 东芝公司 | 日本 | 2 | 1.79% | 40 | 15.56% |
| 6 | 北京航空航天大学 | 中国 | 2 | 1.79% | 24 | 9.34% |
| 7 | 沙特阿拉伯国家石油公司 | 沙特阿拉伯 | 2 | 1.79% | 6 | 2.33% |
| 8 | 东南大学 | 中国 | 2 | 1.79% | 6 | 2.33% |
| 9 | 上海大学 | 中国 | 2 | 1.79% | 4 | 1.56% |
| 10 | 杭州新松机器人自动化股份有限公司 | 中国 | 2 | 1.79% | 3 | 1.17% |
《图 2.2.3》
图 2.2.3 “智能机器人集群协作系统设计与实现”工程开发前沿的主要国家间合作网络
领域课题组人员
领域课题组专家名单
领域课题组组长:卢锡城 潘云鹤
院士专家(按姓氏拼音排序):
第一组:姜会林 李天初 刘泽金 吕跃广
谭久彬 张广军
第二组:陈志杰 丁文华 段宝岩 吴曼青 余少华
第三组:柴天佑 陈 杰 费爱国 卢锡城 潘云鹤 赵沁平
其他专家(按姓氏拼音排序):
蔡一茂 Yuen Chau 陈关荣 陈晓明 程 鹏
董 为 付 俊 顾险峰 韩亚洪 郝 翔
贺诗波 胡慧珠 江 天 李 莉 刘 安
刘华锋 刘 伟 陆振刚 潘 纲 浦 剑
石宣化 田晓华 王从思 王 戟 王 璞
伍 军 谢国琪 辛 斌 徐 鹏 徐 杨
徐志伟 杨 博 易 伟 张 帆 张 晗
张建华 张军平 张拳石 张勇刚 郑能干
钟财军 周 明 卓 成 訾 斌
工作组成员名单
学术指导:吴朝晖 王成红
图情专家:
杨未强 梁江海 李 红 霍凝坤 吴 集
杨 筱 徐海洋 刑中阳 史 尘 赵惠芳
王凯飞 刘书雷 陈振英 耿国桐
联 络 员:黄海涛 王 兵 王甜甜 张纯洁
秘 书:翟自洋 杨未强 谌群芳
执笔组成员名单(按姓氏拼音排序)
研究前沿:
董 玮 韩亚洪 刘辰光 刘华锋 刘 俭
吕伟超 施路平 王海明 王 戟 蔚保国
伍蔡伦 徐 敬 詹乃军 张志勇
开发前沿:
冯明涛 侯玉斌 胡慧珠 胡伟东 姜校顺
金 石 李海峰 廉 蔺 刘 英 吕海斌
彭志刚 王 璞 王耀南 辛 斌 赵鲁豫











 京公网安备 11010502051620号
京公网安备 11010502051620号




