
《1 Engineering research fronts》
1 Engineering research fronts
《1.1 Trends in Top 10 engineering research fronts》
1.1 Trends in Top 10 engineering research fronts
The ten most-researched engineering topics in the field of mechanical and vehicle engineering include mechanical, transportation, ship and marine engineering; weapon science and technology; aeronautical and astronautical science and technology; and power and electrical equipment engineering and technology (as listed in Table 1.1.1). Among these, “low-carbon and zero-carbon fuel engine technologies”, “flexible self-powered wearable sensors”, “multi-material 4D printing”, “state-of-the-art vascular robotic system development”, “transfer learning-based machine fault diagnosis”, and “robot-assisted milling and polishing” are extensively studied traditional topics. “Dynamically reconfigurable mobile micro-robot swarms”, “intelligent performance test for automatic driving in an adversarial environment”, and “wireless charging system for underwater autonomous vehicles” are considered as emerging topics. The annual number of core papers published during the years 2017–2022 is listed in Table 1.1.2.
(1) Hypersonic flight vehicle technology
Hypersonic aircraft refer to aircraft that can fly in the atmosphere at speeds exceeding Mach 5. Compared with traditional subsonic, supersonic, and supersonic aircraft, hypersonic aircraft have high speeds, fast response capabilities, and high penetration success rates. They are also hard to intercept. Moreover, hypersonic aircrafts have tremendous military and potential economic value. The development of a hypersonic vehicle technique involves multiple disciplines, such as high- speed aerodynamics, computational fluid dynamics, high-temperature gas dynamics, chemical dynamics, guidance and control, electronics, and material and structure fabrication. In their more than half a century of development, hypersonic
《Table 1.1.1》
Table 1.1.1 Top 10 engineering research fronts in mechanical and vehicle engineering
| No. | Engineering research front | Core papers | Citations | Citations per paper | Mean year |
| 1 | Hypersonic flight vehicle technology | 50 | 4 930 | 98.6 | 2018.7 |
| 2 | Low-carbon and zero-carbon fuel engine technologies | 47 | 4 429 | 94.23 | 2018.8 |
| 3 | Dynamically reconfigurable mobile micro-robot swarms | 11 | 870 | 79.09 | 2019.1 |
| 4 | Flexible self-powered wearable sensors | 30 | 2 218 | 73.93 | 2019.8 |
| 5 | Intelligent performance test for automatic driving in an adversarial environment | 11 | 337 | 30.64 | 2019.7 |
| 6 | Multi-material 4D printing | 32 | 736 | 23 | 2020.4 |
| 7 | Wireless charging system for underwater autonomous vehicles | 13 | 337 | 25.92 | 2020.2 |
| 8 | State-of-the-art vascular robotic system development | 18 | 377 | 20.94 | 2020.3 |
| 9 | Transfer learning-based machine fault diagnosis | 12 | 328 | 27.33 | 2021 |
| 10 | Robot-assisted milling and polishing | 41 | 1 717 | 41.88 | 2019.9 |
《Table 1.1.2》
Table 1.1.2 Annual number of core papers published for the Top 10 engineering research fronts in mechanical and vehicle engineering
| No. | Engineering research front | 2017 | 2018 | 2019 | 2020 | 2021 | 2022 |
| 1 | Hypersonic flight vehicle technology | 13 | 13 | 9 | 9 | 4 | 2 |
| 2 | Low-carbon and zero-carbon fuel engine technologies | 5 | 19 | 7 | 12 | 3 | 1 |
| 3 | Dynamically reconfigurable mobile micro-robot swarms | 1 | 2 | 4 | 3 | 1 | 0 |
| 4 | Flexible self-powered wearable sensors | 2 | 4 | 8 | 4 | 9 | 3 |
| 5 | Intelligent performance test for automatic driving in an adversarial environment | 1 | 2 | 2 | 1 | 4 | 1 |
| 6 | Multi-material 4D printing | 4 | 1 | 1 | 4 | 16 | 6 |
| 7 | Wireless charging system for underwater autonomous vehicles | 1 | 3 | 0 | 1 | 5 | 3 |
| 8 | State-of-the-art vascular robotic system development | 0 | 2 | 4 | 3 | 4 | 5 |
| 9 | Transfer learning-based machine fault diagnosis | 0 | 0 | 0 | 2 | 8 | 2 |
| 10 | Robot-assisted milling and polishing | 3 | 3 | 9 | 11 | 11 | 4 |
vehicle techniques have achieved great success in missile weaponry but slight progress in reusable launch vehicles and aircraft. The major challenges focus on four aspects. The first aspect is the development of a new theory and technique to design new configuration with a high lift-to-drag ratio and a high payload-to-structural weight fill-in ratio under a wide-speed band. The second is to develop new propulsion system in addition to scramjet engines that work well in high-speed conditions. This new system may be the new technology that combines aero-engines and ramjets. The third is to develop extremely high- temperature resistant materials and thermal protection cooling systems and methodologies. The fourth aspect involves control and navigation systems. The complicated environment and extremely hard work states demand cutting-edge techniques for control and navigation systems. Analysis shows that the above four research directions are the key to developing reusable hypersonic launch, hypersonic aircraft, and ground take-off for space flight vehicles.
(2) Low-carbon and zero-carbon fuel engine technologies
Low-carbon and zero-carbon fuel engine technologies refer to the use of fuels with low or zero carbon content to partially or fully replace conventional high-carbon-content gasoline, diesel, and other fuels, with the goal of reducing the specific carbon dioxide emissions of engines from the source. It involves the cross-integration of power engineering and engineering thermophysics, energy science and technology, chemistry and chemical engineering, traffic and transportation engineering, materials science and engineering, and other disciplines. Related research includes the manufacturing of various low-carbon and zero-carbon fuels, their safe onboard storage and delivery, clean and effective utilization through novel engine combustion modes and control, and the analysis and optimization of their full life cycle carbon emissions. At present low-carbon and zero-carbon fuels that have received extensive public and research attention include natural gas, biomass-derived methanol, ethanol, dimethyl ether and biodiesel, green hydrogen, green ammonia, and e-fuel, which are synthesized using renewable electricity. Significant technological advancements of low-carbon and zero-carbon engines have been achieved in recent years. Various companies and research institutions have developed prototype engines that can run using carbon-free fuels, including hydrogen and ammonia. Future research directions will focus on the development of novel engine combustion and emission control technologies that can further increase the thermal efficiency of engines running on low-carbon and zero-carbon fuels while approaching zero pollutant emissions. Meanwhile, with the continuous development of renewable electricity, efficient and low-cost production of biofuel, green hydrogen, ammonia, and other related technologies, the use of low- and zero-carbon fuels in engines will eventually become widespread.
(3) Dynamically reconfigurable mobile micro-robot swarms
A mobile micro-robot swarm refers to an autonomous task execution swarm in which a large number of dispersed, low- cost isomorphic/heteromorphic autonomous mobile micro-robot individuals with local perception, decision-making, and action capabilities are self-organized according to the task objectives in wide-area and complex task scenarios by means of the mechanisms of information interaction, cooperation, and coordination among the individuals. A micro-robot swarm is characterized by a stable and orderly topology, individual coordination and collaboration, a consistent behavioral goal, and mutually complementary functions. Dynamic reconfigurability indicates the ability of a mobile micro-robot swarm to dynamically change its composition, topology, coordination relationships, and individual task loads according to changes in mission objectives, capability requirements, mission execution states and situations, environmental events, individual robots’ capabilities and others uncertainties to quickly respond to changes in the swarm and in the environment. A dynamically reconfigurable mobile micro- robot swarm is a vivid reflection and physical embodiment of a multiagent system with self-organization, self-adaption, and intelligence emergence characteristics, involving not only individual intelligence (autonomous control, autonomous perception, autonomous planning, and autonomous decision making) but also a swarm-level architecture, communication network, coordination mechanism, information fusion, state estimation, task allocation, path planning, formation control, multiagent consistency, and other multilevel, multifaceted theories and technologies. A dynamically reconfigurable mobile micro-robot swarm is also an advanced form of multi-robot system collaborative control technology. Traditional multi-robot cooperative control is usually realized through the use of a centralized control and global coordination mode, incurring difficulties in swarm scale, coordination efficacy, and expandability. Dynamically reconfigurable mobile micro-robot swarms are significantly different from traditional multi-robot cooperative control technology in terms of the number of robots involved, complexity of tasks, environment, and division of labor and collaboration as well as self-adaptation and robustness to tasks, environmental events, and so on. Furthermore, adapting existing technology to the development requirements of dynamically reconfigurable mobile micro-robot swarms is difficult. The swarming behaviors of many swarming animals in nature can serve as an inspiration for the development of dynamically reconfigurable mobile micro-robot swarms. Exploring the emergence mechanisms of swarm intelligence in swarming animals and mapping it into the field of control of dynamically reconfigurable mobile micro-robot swarms and constructing a task-oriented self-organization-based dynamically reconfigurable architecture and self-organized collaboration mechanism based on localized information propagation under complex and restricted communication conditions. Control of key technologies such as the wide-area, distributed collaborative dynamic allocation of large-scale swarm multimodal tasks; large-scale multisource heterogeneous information fusion and decentralized situational awareness under weak communication conditions; path planning and replanning, considering dynamics; formation dynamic control, including motion uncertainty information and event-triggered multi-robot coherent tracking; and so on is the key direction and a research hotspot for the development of dynamically reconfigurable mobile micro-robot swarms.
(4) Flexible self-powered wearable sensors
A flexible self-powered wearable sensor refers to a specialized device that can be attached to the surface of the human body. Its main function is to collect and monitor physiological parameters or environmental information relevant to the human body. A distinguishing characteristic of this sensor is its inherent capability to generate power autonomously, eliminating the need for an external power source. This self-powering feature contributes significantly to the sensor’s capacity to ensure wearer comfort and convenience during usage. Typically, such sensors are fabricated using flexible materials, enabling them to accommodate various body shapes and movements effectively. The key innovation lies in the incorporation of energy harvesting technology, which empowers the sensor to derive power from bodily motions or alternative ambient energy sources, such as light or temperature gradients. This self-sustaining mechanism obviates the reliance on conventional batteries or external power supplies, enhancing the overall efficiency and practicality of the wearable sensor. Flexible self-powered technology enables the conversion of micro-energy from the human body and the surrounding environment into electric energy. This technology provides active wearable sensors for human physiological and motion monitoring or prolonged working life for wearable sensors. Energy harvesting and conversion methods for flexible self-powered wearable sensors primarily encompass electromagnetic, piezoelectric, triboelectric, photovoltaic, thermoelectric, and others. Relevant research principally involves three aspects. The first one is the study of mechanisms, materials, structures, and performance enhancement for energy conversion. This study includes the development of energy harvesting devices that can be flexibly attached to the human body to enhance energy conversion efficiency. The second aspect is the combination of various environmental energy collection methods to design and fabricate flexible composite energy harvesting systems, thereby optimizing the environmental energy utilization efficiency. The third one is the energy management and signal processing technologies used to develop integrated flexible circuits to improve the utilization rate of electric energy, including the sensitivity and accuracy of active wearable sensors. Flexible self-powered wearable sensors provide an attractive direction for the development of wearable electronics with their capabilities for environmental energy harvesting, active sensing, and miniature integration. These capabilities represent the development trend of self-powered technology and body area networks, with broad application prospects in fields such as motion sensing, health monitoring, and personalized medicine.
(5) Intelligent performance test for automatic driving in an adversarial environment
An intelligent performance test for automatic driving in an adversarial environment is the key technology and means for solving the intelligent research and development, training, evaluation, rating, and verification of vehicles, ships, and other modes of transportation. Virtual simulation, scaled model, scenario test, and real vehicle/ship test are the basic methods for traditional autonomous driving testing. However, with the enhancement of digital twin technology and the evolution of sensor communication technology, a single-mode test method can no longer meet the requirements of intelligent performance testing in terms of environmental consistency, effectiveness, and repeatability. Virtual–real fusion testing that emphasizes mapping, interaction, linkage, and complementarity between digital space and physical space has become a research hotspot in intelligent performance testing. In particular, under the premise of ensuring safety and efficiency in intelligence testing, determining how to reflect game, confrontation, and cooperation between agents and between agents and humans and building an adversarial test environment are extremely important fundamental problems that are worthy of attention. Theories and methods of testing and evaluation, driving performance test and evaluation, safety test and evaluation, reliability test and evaluation, comprehensive tests, test tool chain design, and other issues are currently the major research hotspots in this field. Systems engineering concepts (e.g., model-based systems engineering, model-based design, digital twins, and cyber–physical systems), modeling and simulation technologies that are relevant to intelligent performance test are also receiving increasing attention.
(6) Multi-material 4D printing
Multi-material 4D printing is a technology that utilizes additive manufacturing processes to create intelligent components with “stimulus–response” characteristics. The stimuli mainly originate from external energy fields, such as heat, electricity, magnetism and light, and the response manifests as controllable changes in the shape, properties, or functionalities of the components over time. Traditional single-material additive manufacturing has encountered significant challenges in meeting the demands of high-end manufacturing industries for property, functionality, and their dynamic variations. Consequently, the integration of materials, structures, and functionalities in multi-material 4D printing has become a cutting-edge technology. This involves distributing different materials to designated regions and achieving predetermined changes in structures and properties through external stimuli. The inherent self-sensing and self-driven qualities of such components hold immense potential for aerospace deployable structures, biomedical scaffolds, and other critical applications. The current research focus in this field includes intelligent component design and topology optimization, the development of new 4D printing processes, numerical simulations and path planning for the printing process, micro/nano-level multi-material 4D printing, metamaterial printing, characterization methods for intelligent component property and its variations, and the regulation and optimization of multi-material interface properties. There is also increasing interest in designing intelligent components with various responses under multiple energy fields and their multi-material 4D printing, alongside high-precision and high-efficiency multi-material printing.
(7) Wireless charging system for underwater autonomous vehicles
Power endurance and sustainability are important indices for measuring the performance of underwater autonomous vehicles, mainly depending on the energy storage capacity of the onboard energy system. The method of recovering vehicles and quickly replacing their modular energy system suffers from high cost, inefficiency, and poor concealment. Underwater wireless charging technology has become a key landmark technology for enhancing the power endurance and sustainability of underwater autonomous vehicles because it achieves energy transmission through a non-contact method, which has the advantages of high safety and strong environmental adaptability. Wireless charging technology can be classified into magnetic field, electric field, microwave, laser, and ultrasonic modes according to the power transfer mechanism. Considering the complexity of the underwater environment and the particularity of the transmission medium, the magnetic field mode is considered as one of the optimal schemes for underwater charging due to its unique advantages in the principle and structure of power transmission, with significant advantages in the wireless charging process of underwater autonomous vehicles. In the principle design and engineering practice of underwater charging systems, the design of the magnetic coupling mechanism, seawater medium energy transmission and eddy current loss characteristics, bidirectional energy transmission circuit topology and control strategy, underwater bidirectional energy, and information synchronous transmission technology are the popular topics on underwater wireless charging technology.
(8) State-of-the-art vascular robotic system development
Vascular diseases have emerged as a primary threat to human health. Vascular robotic systems can offer valuable support to interventionalists during vascular interventions, such as enhancing precision, minimizing radiation exposure, and reducing workload. However, most existing vascular robotic systems use a master–slave control paradigm, where tool delivery at the slave end relies entirely on the master’s instructions. These systems lack expert-level capabilities in intelligent analysis, decision- making, and manipulation, and thus, they fail to provide effective intelligent assistance to interventionalists and restrict their widespread application. To enhance the intelligence of vascular robotic systems, key challenges, such as autonomous image navigation, active force perception, and expert skill learning, must be addressed. These challenges encompass frontier issues, such as vessel segmentation in surgical images, detection and localization of interventional tools, preoperative/intraoperative multimodal image registration, modelling tool–vessel interaction, tactile perception and feedback, manipulation skill modeling and learning, and human–robot intelligent collaboration. Moreover, focus has been increasing on the mechanism design for collaborative multi-tool delivery, intelligent multi-tool control, and precise quantitative delivery in robot-assisted intervention for complex vascular lesions.
(9) Transfer learning-based machine fault diagnosis
Transfer learning refers to the process of applying knowledge learned in one field to another. In the context of fault diagnosis, transfer learning involves using diagnostic methods validated in simulations or laboratory settings. This means that insights gained in a digital or semi-physical space can be leveraged in the actual physical space. Transfer learning can be accomplished through feature- and model-based transfer, which involve techniques, such as enhancement and fine-tuning. These methods aim to enhance the consistency of samples between the source domain and the target domain, thus reducing the disparity during the transfer process. Consequently, they improve the decision accuracy and scene generalization performance of fault diagnosis models, particularly when working with limited data and varying operating conditions. Transfer learning proves especially crucial in fault diagnosis for large complex equipment, such as aircraft engines, aerospace engines, nuclear power equipment, and space station operation equipment. In such cases, obtaining real fault samples is difficult due to the destructive nature of the faults. Transfer learning is expected to offer substantial benefits in these scenarios. Research on the theory and application of transfer learning to fault diagnosis represents the current hotspots and challenges in this field. Similar to how jade can be polished using stones from other hills, transfer learning has the potential to enhance the effectiveness of fault diagnosis for major equipment.
(10) Robot-assisted milling and polishing
Robot-assisted milling and polishing is a method of using the flexibility and reconfigurability of robots to achieve high-efficiency, high-quality, and stable machining of large and complex components in the major equipment of strategic industries, including aviation, aerospace, and navigation. Large and complex components have characteristics such as large size, complex surface, and strict requirements of shapes and dimensions, and the high-performance manufacturing of these components is a recognized international problem. Traditional manufacturing mostly uses equipment such as machine tools and machining centres, which have small travel distance and insufficient mobility. The machining of large structural parts requires multiple segmentations and slicing, which result in low manufacturing efficiency. At the same time, the process of polishing relies heavily on manual operations, resulting in inconsistent machining accuracy. Moreover, the generation of polishing dust damages the operators’ health. Robot- assisted machining has the characteristics of flexible large-space manufacturing, good reconfigurability, and easy integration and coordination. It can transform the manufacturing mode for large and complex structures and shows great application potentials in fields such as aircraft structural parts milling, large wind turbine blades, and high-speed rail body polishing. The main research hotspots in this field are the precision control of large components, the machining mechanism of robot-assisted milling and polishing, the innovative design of machining robot system, and the integration of multi-robot collaborative measurement- modeling-machining.
《1.2 Interpretations for three key engineering research fronts》
1.2 Interpretations for three key engineering research fronts
1.2.1 Hypersonic flight vehicle technology
The research on hypersonic flight vehicle technology can be traced back to the development of hypersonic gliders in the 1950s. Since the late 1990s, hypersonic flight vehicle techniques have become the research focus in several science and technology powerhouses as the scramjet technology matures. Several nations have successfully conducted experiments and flight tests, and some have used hypersonic missiles in practical missions.
The next generation of flight vehicles calls for the capability to reach any corner on earth within an hour, fast penetration ability, and launch vehicle reusability from ground to space. The hypersonic vehicle technology facilitates the objectives. Compared with traditional aircraft, hypersonic vehicles work in extremely complex environments, flights with wide speed bands, and large altitude ranges. They experience an extremely complicated flow field, and aerodynamic heating produces extremely high temperatures in the boundary layer. The combined effects make designing aerodynamic configurations and vehicle structure layouts extremely difficult. Moreover, cutting-edge propulsion techniques are required. The vehicle body structure is strongly coupled with the propulsion system. High nonlinearity and big uncertainty exist in the flight vehicle model. Thus, high accuracy in control and terminal guidance is very hard to obtain. Hypersonic aircraft technology has become a hot research frontier in the 21st century. The major challenges focus on four aspects. The first aspect involves studying the principle combining the wave rider and lift body theory to develop a configuration with a high lift-to-drag ratio. This aspect also involves studying AI- based optimization methods for lightweight structures and structures with high payload-to-vehicle fill-in ratios. The second aspect includes developing a new propulsion engine, investigating new methods to utilize the advantages of aero-engines and ram jets, studying techniques for variable sizes of engine burners, and developing adjustable flame stabilization devices. The third aspect involves studying extremely high-temperature-resistant composite material systems and ablative heat protection methods, constructing high-accuracy flow models in ablation and detachment processes, and developing accurate simulation methods and experimental test approaches. The fourth aspect includes studying the methodology for an accurate flight control dynamic model, deriving a robust intelligent control strategy to handle strong interferences and big uncertainties, and developing high-accuracy terminal guidance techniques in the hypersonic flight phase. The study in above aspects lays the foundation for developing hypersonic flight vehicle theory and technology, and is of great practical significance for China to achieve a strong aerospace force and move toward an aerospace powerhouse.
The country with the highest number of core papers published in this front is China, and the countries with the highest citations per paper are USA, Canada, and Singapore, as shown in Table 1.2.1. Among the Top 10 countries with the most published papers, China has the most collaboration with UK, Canada, and Singapore, as shown in Figure 1.2.1. Institution with the highest number of core papers published is Northwestern Polytechnical University. The institutions with the highest citations per paper are Concordia University, National University of Singapore, and Tsinghua University, as shown in Table 1.2.2. As shown in Figure 1.2.2, Northwestern Polytechnical University and Tsinghua University have the most collaboration. The top country for citing papers is China, as shown in Table 1.2.3. The Top 3 output institutions for citing papers are Northwestern Polytechnical University, Harbin Institute of Technology, and Beihang University, as shown in Table 1.2.4. Figure 1.2.3 shows the roadmap of the engineering research front of “hypersonic flight vehicle technology”.
《Table 1.2.1》
Table 1.2.1 Countries with the greatest output of core papers on “hypersonic flight vehicle technology”
| No. | Country | Core papers | Percentage of core papers/% | Citations | Citations per paper | Mean year |
| 1 | China | 43 | 86 | 4 183 | 97.28 | 2018.6 |
| 2 | USA | 4 | 8 | 609 | 152.25 | 2018.2 |
| 3 | UK | 4 | 8 | 384 | 96 | 2019.2 |
| 4 | Canada | 3 | 6 | 439 | 146.33 | 2017.7 |
| 5 | Singapore | 3 | 6 | 436 | 145.33 | 2017.3 |
| 6 | Iran | 3 | 6 | 217 | 72.33 | 2019.3 |
| 7 | Republic of Korea | 3 | 6 | 183 | 61 | 2020 |
| 8 | Azerbaijan | 2 | 4 | 159 | 79.5 | 2018.5 |
| 9 | India | 1 | 2 | 125 | 125 | 2020 |
| 10 | Australia | 1 | 2 | 63 | 63 | 2021 |
《Figure 1.2.1》

Figure 1.2.1 Collaboration network among major countries in the engineering research front of “hypersonic flight vehicle technology”
《Table 1.2.2》
Table 1.2.2 Institutions with the greatest output of core papers on “hypersonic flight vehicle technology”
| No. | Institution | Core papers | Percentage of core papers/% | Citations | Citations per paper | Mean year |
| 1 | Northwestern Polytechnical University | 12 | 24 | 1 166 | 97.17 | 2018.8 |
| 2 | National University of Defense Technology | 7 | 14 | 761 | 108.71 | 2018.7 |
| 3 | Harbin Institute of Technology | 6 | 12 | 601 | 100.17 | 2019 |
| 4 | Beihang University | 6 | 12 | 422 | 70.33 | 2018 |
| 5 | Tsinghua University | 5 | 10 | 602 | 120.4 | 2018.4 |
| 6 | Chinese Academy of Sciences | 5 | 10 | 537 | 107.4 | 2020 |
| 7 | Air Force Engineering University | 5 | 10 | 374 | 74.8 | 2018.8 |
| 8 | Beijing Institute of Technology | 3 | 6 | 192 | 64 | 2019.7 |
| 9 | Concordia University | 2 | 4 | 353 | 176.5 | 2017.5 |
| 10 | National University of Singapore | 2 | 4 | 257 | 128.5 | 2017.5 |
《Figure 1.2.2》
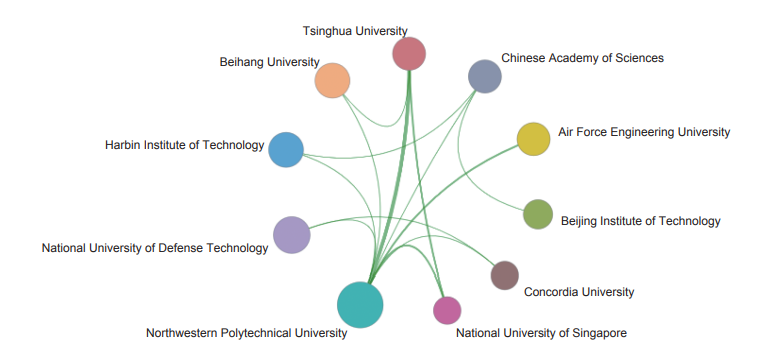
Figure 1.2.2 Collaboration network among major institutions in the engineering research front of “hypersonic flight vehicle technology”
《Table 1.2.3》
Table 1.2.3 Countries with the greatest output of citing papers on “hypersonic flight vehicle technology”
| No. | Country | Citing papers | Percentage of citing papers/% | Mean year |
| 1 | China | 4 978 | 70.63 | 2020.7 |
| 2 | USA | 485 | 6.88 | 2020.6 |
| 3 | India | 311 | 4.41 | 2021 |
| 4 | UK | 258 | 3.66 | 2020.6 |
| 5 | Iran | 222 | 3.15 | 2020.7 |
| 6 | Republic of Korea | 192 | 2.72 | 2020.9 |
| 7 | Australia | 141 | 2 | 2020.7 |
| 8 | Canada | 135 | 1.92 | 2020.5 |
| 9 | Russia | 128 | 1.82 | 2020.6 |
| 10 | Italy | 106 | 1.5 | 2020.9 |
《Table 1.2.4》
Table 1.2.4 Institutions with the greatest output of citing papers on “hypersonic flight vehicle technology”
| No. | Institution | Citing papers | Percentage of citing papers/% | Mean year |
| 1 | Northwestern Polytechnical University | 615 | 20.56 | 2020.6 |
| 2 | Harbin Institute of Technology | 450 | 15.05 | 2020.6 |
| 3 | Beihang University | 356 | 11.9 | 2020.8 |
| 4 | Nanjing University of Aeronautics and Astronautics | 319 | 10.67 | 2020.6 |
| 5 | National University of Defense Technology | 308 | 10.3 | 2020.7 |
| 6 | Chinese Academy of Sciences | 272 | 9.09 | 2020.6 |
| 7 | Beijing Institute of Technology | 186 | 6.22 | 2020.9 |
| 8 | Southeast University | 132 | 4.41 | 2020.3 |
| 9 | Tianjin University | 126 | 4.21 | 2020.1 |
| 10 | Xi’an Jiaotong University | 115 | 3.84 | 2021 |
《Figure 1.2.3》

Figure 1.2.3 Roadmap of the engineering research front of “hypersonic flight vehicle technology”
1.2.2 Low-carbon and zero-carbon fuel engine technologies
Combustion engines are the primary power sources for road and maritime transport, off-road construction, agricultural machineries, and national defense equipment in our country. At present, most combustion engines use petroleum gasoline and diesel as fuel. While providing the necessary power, these engines emit a considerable amount of CO2 into the atmosphere. Statistics indicate that carbon emissions from the transportation industry accounts for 10% of all carbon emissions in the country. Under the background of the “dual carbon” strategy, reducing and finally achieving zero engine carbon emissions through technological innovations is an imperative task. This goal is a prerequisite for the existence and sustainable development of combustion engines and related industries. Two technological routes are available for low-carbon engines: ① further increasing the thermal efficiency of conventional engines to reduce their specific fuel consumption, and ② partially or fully substituting conventional high-carbon-content gasoline and diesel fuels with new low-carbon-content fuels to stop carbon emissions from the source. Zero-carbon engines can only be realized through the full adoption of carbon-free or carbon-neutral fuels.
Increasing the thermal efficiency of conventional gasoline and diesel engines cannot only reduce specific carbon emissions but also help increase fuel economy. Therefore, this issue has always been the focus of research and development. For diesel engines, technological pathways for increasing thermal efficiency include boosting fuel injection pressure, compound turbocharging, exhaust heat recovery, and smart control. For gasoline engines, gasoline direction injection, variable compression ratio, stratified lean burn, gasoline compression ignition, electrification, and novel thermodynamic cycle are potential technologies for high-efficiency enablers. Zero-carbon fuels that can be used in engines are mostly hydrogen and ammonia, while life cycle carbon-neutral fuels include biomass-derived methanol, ethanol, dimethyl ether and biodiesel, and e-fuel, the latter of which are synthesized using renewable electricity combined with CO2 captured from the air. Although carbon element is present in many carbon-neutral fuels and its combustion in engines will surely emit CO2, its synthesis consumes CO2, such that carbon neutrality can be achieved through the whole life cycle of these fuels. Future research is expected to focus on two aspects: ① the development of high-efficiency and low-cost techniques for the large-scale manufacturing of various carbon-neutral fuels; and ② fuel design based on the complementary combustion features of various carbon-neutral fuels, which will support the realization of zero-carbon emission engines when combined with the development of novel combustion and emission control techniques.
The combustion of hydrogen and ammonia does not produce any CO2 emissions, and engines powered by these carbon- free fuels have been a research focus in recent years. Hydrogen engines mostly employed a spark ignition mode, and major research directions include techniques to avoid flashback and knocking, NOx emission mitigation techniques, and safe and efficient onboard hydrogen storage methods. Considering the low reactivity and low flame speed of ammonia, achieving its stable combustion across all engine conditions is challenging. Current strategies primarily include mixing ammonia with more reactive fuels, such as natural gas, gasoline, and diesel. The co-combustion of ammonia and hydrogen is also possible, with the potential of obtaining the required hydrogen from the onboard cracking of ammonia. Future research is expected to focus on high-efficiency and clean combustion modes for ammonia, highly effective onboard selective catalytic reduction, and ammonia cracking systems.
Low-carbon and zero-carbon fuel engine technology involves the fields of power engineering and engineering thermophysics, energy science and technology, chemistry and chemical engineering, traffic and transportation engineering, materials science and engineering, and other related disciplines. It is a key technology for ensuring the achievement of the “dual carbon” strategy in the transportation industry and promoting the sustainable development of combustion engines and other related industries under the “dual carbon” background. It is an area of high research value and societal impact.
The top countries with the maximum number of core papers published in this front are China, UK, and India, and the countries with the highest citations per paper are Saudi Arabia, UK, and Canada, as shown in Table 1.2.5. China has the most collaboration with UK and with Ireland, as shown in Figure 1.2.4. Institutions with the maximum number of highest citations per paper are University of Oxford, Tsinghua University, and National Institute of Technology, as shown in Table 1.2.6. There is cooperation between Dalian Maritime University and Trinity College Dublin, as well as between Xi’an Jiaotong University and Beijing Institute of Technology. Cooperation also exists between Tsinghua University and the University of Oxford, as shown in Figure 1.2.5. The top country for citing papers is China, as shown in Table 1.2.7. The Top 3 output institutions for citing papers are Xi’an Jiaotong University, Chinese Academy of Sciences, and Beijing Institute of Technology, as shown in Table 1.2.8. Figure 1.2.6 shows the roadmap of the engineering research front of “low-carbon and zero-carbon fuel engine technologies”.
《Table 1.2.5》
Table 1.2.5 Countries with the greatest output of core papers on “low-carbon and zero-carbon fuel engine technologies”
| No. | Country | Core papers | Percentage of core papers/% | Citations | Citations per paper | Mean year |
| 1 | China | 16 | 34.04 | 1 755 | 109.69 | 2019.2 |
| 2 | UK | 10 | 21.28 | 1 294 | 129.4 | 2019.1 |
| 3 | India | 6 | 12.77 | 565 | 94.17 | 2019.2 |
| 4 | USA | 5 | 10.64 | 505 | 101 | 2019.8 |
| 5 | Turkey | 5 | 10.64 | 471 | 94.2 | 2019 |
| 6 | Canada | 4 | 8.51 | 462 | 115.5 | 2018.2 |
| 7 | Norway | 3 | 6.38 | 248 | 82.67 | 2020 |
| 8 | Malaysia | 3 | 6.38 | 215 | 71.67 | 2018 |
| 9 | Ireland | 3 | 6.38 | 184 | 61.33 | 2019.7 |
| 10 | Saudi Arabia | 2 | 4.26 | 326 | 163 | 2018 |
《Figure 1.2.4》

Figure 1.2.4 Collaboration network among major countries in the engineering research front of “low-carbon and zero-carbon fuel engine technologies”
《Table 1.2.6》
Table 1.2.6 Institutions with the greatest output of core papers on “low-carbon and zero-carbon fuel engine technologies”
| No. | Institution | Core papers | Percentage of core papers/% | Citations | Citations per paper | Mean year |
| 1 | University of Oxford | 2 | 4.26 | 741 | 370.5 | 2018.5 |
| 2 | Tsinghua University | 2 | 4.26 | 722 | 361 | 2018 |
| 3 | National Institute of Technology | 2 | 4.26 | 229 | 114.5 | 2018.5 |
| 4 | Sathyabama Institute of Science and Technology |
2 | 4.26 | 178 | 89 | 2019.5 |
| 5 | Xi’an Jiaotong University | 2 | 4.26 | 155 | 77.5 | 2021 |
| 6 | Dalian Maritime University | 2 | 4.26 | 139 | 69.5 | 2020.5 |
| 7 | Trinity College Dublin | 2 | 4.26 | 139 | 69.5 | 2020.5 |
| 8 | Beijing Institute of Technology | 2 | 4.26 | 111 | 55.5 | 2020 |
| 9 | Brunel University London | 2 | 4.26 | 110 | 55 | 2017.5 |
| 10 | University of Malaya | 2 | 4.26 | 91 | 45.5 | 2018 |
《Figure 1.2.5》
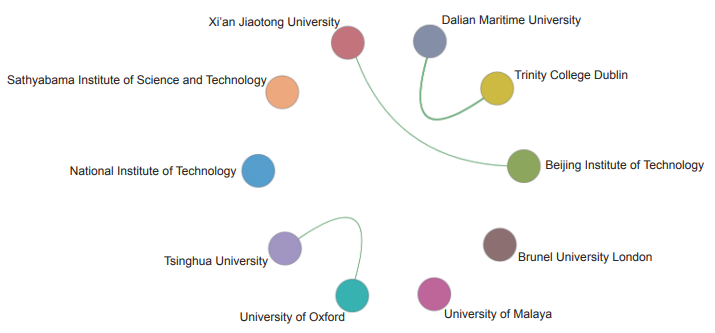
Figure 1.2.5 Collaboration network among major institutions in the engineering research front of “low-carbon and zero-carbon fuel engine technologies”
《Table 1.2.7》
Table 1.2.7 Countries with the greatest output of citing papers on “low-carbon and zero-carbon fuel engine technologies”
| No. | Country | Citing papers | Percentage of citing papers/% | Mean year |
| 1 | China | 1 357 | 36.82 | 2021.2 |
| 2 | India | 545 | 14.79 | 2021.1 |
| 3 | USA | 356 | 9.66 | 2021.1 |
| 4 | UK | 304 | 8.25 | 2021.2 |
| 5 | Italy | 200 | 5.43 | 2021 |
| 6 | Turkey | 174 | 4.72 | 2021.1 |
| 7 | Germany | 171 | 4.64 | 2021.3 |
| 8 | Republic of Korea | 150 | 4.07 | 2021.5 |
| 9 | Malaysia | 146 | 3.96 | 2021.1 |
| 10 | Saudi Arabia | 142 | 3.85 | 2021.4 |
《Table 1.2.8》
Table 1.2.8 Institutions with the greatest output of citing papers on “low-carbon and zero-carbon fuel engine technologies”
| No. | Institution | Citing papers | Percentage of citing papers/% | Mean year |
| 1 | Xi’an Jiaotong University | 102 | 12.59 | 2021.4 |
| 2 | Chinese Academy of Sciences | 96 | 11.85 | 2021.2 |
| 3 | Beijing Institute of Technology | 91 | 11.23 | 2021.1 |
| 4 | Tianjin University | 89 | 10.99 | 2021.2 |
| 5 | Tsinghua University | 88 | 10.86 | 2021.1 |
| 6 | Shanghai Jiao Tong University | 78 | 9.63 | 2021.3 |
| 7 | Beijing University of Technology | 69 | 8.52 | 2021.1 |
| 8 | Jiangsu University | 68 | 8.4 | 2020.8 |
| 9 | Zhejiang University | 46 | 5.68 | 2021.1 |
| 10 | Sathyabama Institute of Science and Technology | 42 | 5.19 | 2021 |
《Figure 1.2.6》

Figure 1.2.6 Roadmap of the engineering research front of “low-carbon and zero-carbon fuel engine technologies”
1.2.3 Dynamically reconfigurable mobile micro-robot swarms
As the application requirements of intelligent mobile robots expand toward the direction of complex multimodal tasks, three-dimensional wide-area operation, complex and changeable working environments, and interference and confrontation, meeting the functional and performance requirements of single complex and expensive robots has become difficult. The use of a large number of dynamically reconfigurable, and relatively low-cost isomorphic/heterogeneous autonomous mobile micro-robots to form a task execution swarm, giving full play to the advantages of group division of labor, can not only improve the efficiency and robustness of task completion in complex environments but also reduce the cost of developing special complex system equipment and obtain significant economic benefits. Dynamically reconfigurable mobile micro-robot swarms have become an important development direction in the field of intelligent mobile robots and have broad application prospects in intelligent manufacturing factories, area coverage exploration, wide-area target search, and military operations.
Dynamically reconfigurable mobile micro-robot swarms include aerial intelligent unmanned aerial vehicle swarms, ground mobile robot swarms, water surface and underwater unmanned vehicles, and other forms, as well as the mixed swarms of the aforementioned forms. The individual robots in a swarm can be isomorphic or heterogeneous. The overall behavior of a dynamically reconfigurable mobile micro-robot swarm derives from the mutual coordination and cooperation of the individual robots with autonomous abilities based on the task goal, which is a vivid reflection and physical embodiment of the self- organization, self-adaptability, and intelligence emergence of a multiagent system and an advanced form of the collaborative control technology of a multi-robot system.
Dynamically reconfigurable mobile micro-robot swarm technology involves not only individual intelligence (autonomous control, autonomous perception, autonomous planning, and autonomous decision-making) but also multilevel and multifaceted theories and technologies such as a swarm architecture, communication network, coordination mechanism, information fusion, state estimation, task assignment, path planning, formation control, and multiagent consistency at the swarm level. Traditional multi- robot cooperative control mainly involves a hierarchical control architecture, strongly connected communication network, collaboration and coordination based on global information, centralized task allocation and scheduling, and pilot-following formation control. Improving a swarm’s scale, collaborative efficiency, and scalability is difficult, and a swarm’s scale is generally limited to several dozens of individuals. A dynamically reconfigurable mobile micro-robot swarm usually has a number of individuals reaching several hundred or several thousand or more, and the requirements for complex tasks, environments, division of labor and cooperation as well as adaptability and robustness to tasks and environmental events are significantly different from those of traditional multi-robot cooperative control technology. Meeting the development requirements of dynamically reconfigurable mobile micro-robot swarms is difficult for existing collaborative technology; thus, swarm theory and technology breakthroughs are urgently needed.
Modern biological studies revealed that some typical swarming animals, such as birds, fish, ants, wolves, and so on, can perceive the situation of and changes in the swarm and make decisions that are consistent with the behavioral goals of the swarm by using only the local information of the swarm and information of several neighboring individuals, thereby facilitating the emergence of the overall behavior of the swarm. Animal swarm behavior can serve as an inspiration and reference for the development of dynamically reconfigurable mobile micro-robot swarms. The intelligence emergence mechanism of swarm animals should be explored and mapped in the field of swarm control of dynamically reconfigurable mobile micro-robots, and a task-oriented dynamically reconfigurable architecture based on self-organization and a self- organization cooperation mechanism based on local information propagation under complex limited communication conditions should be built. Control of key technologies such as the dynamic assignment of large-scale distributed cooperative tasks in wide-area swarms; large-scale multisource heterogeneous information fusion and decentralized situation awareness under weak communication conditions; path planning and replanning, considering dynamic characteristics; dynamic formation control, including motion uncertainty information and event-based multi-robot consistency tracking; and so on has become a research hotspot for the development of dynamically reconfigurable mobile micro-robot swarms.
The top country with the maximum number of core papers published in this front is China, and the country with the highest citations per paper is USA, as shown in Table 1.2.9. Collaboration exist between China and USA, as well as between China and Switzerland. Collaboration can also be found between Germany and Turkey, as shown in Figure 1.2.7. Institution with the maximum number of highest citations per paper is the Chinese University of Hong Kong, and the top three institutions with the highest citations per paper are Beijing Institute of Technology, Michigan State University, and Harbin Institute of Technology, as shown in Table 1.2.10. Collaboration exists between Harbin Institute of Technology, Beijing Institute of Technology, and Michigan State University. Koç University and Max Planck Institute for Intelligent Systems also have a collaboration. The Chinese University of Hong Kong has collaboration with Chinese Academy of Sciences, University of Missouri, the Hong Kong Polytechnic University, and Shenzhen Institute of Artificial Intelligence and Robotics Society (wherein Chinese Academy of Sciences collaborates with University of Missouri), as shown in Figure 1.2.8. The top country for citing papers is China, as shown in Table 1.2.11. The Top 3 output institutions for citing papers are the Chinese University of Hong Kong, Chinese Academy of Sciences, and Harbin Institute of Technology, as shown in Table 1.2.12. Figure 1.2.9 shows the roadmap of the engineering research front of “dynamically reconfigurable mobile micro-robot swarms”.
《Table 1.2.9》
Table 1.2.9 Countries with the greatest output of core papers on “dynamically reconfigurable mobile micro-robot swarms”
| No. | Country | Core papers | Percentage of core papers/% | Citations | Citations per paper | Mean year |
| 1 | China | 10 | 90.91 | 803 | 80.3 | 2019.1 |
| 2 | USA | 2 | 18.18 | 330 | 165 | 2018 |
| 3 | Germany | 1 | 9.09 | 67 | 67 | 2019 |
| 4 | Turkey | 1 | 9.09 | 67 | 67 | 2019 |
| 5 | Switzerland | 1 | 9.09 | 10 | 10 | 2021 |
《Figure 1.2.7》
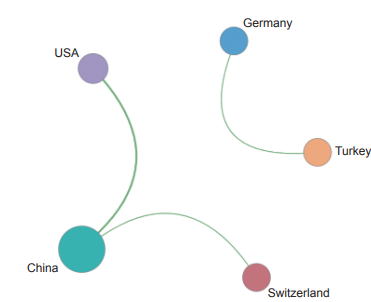
Figure 1.2.7 Collaboration network among major countries in the engineering research front of “dynamically reconfigurable mobile micro- robot swarms”
《Table 1.2.10》
Table 1.2.10 Institutions with the greatest output of core papers on “dynamically reconfigurable mobile micro-robot swarms”
| No. | Institution | Core papers | Percentage of core papers/% | Citations | Citations per paper | Mean year |
| 1 | The Chinese University of Hong Kong | 8 | 72.73 | 516 | 64.5 | 2019.1 |
| 2 | Harbin Institute of Technology | 2 | 18.18 | 287 | 143.5 | 2019 |
| 3 | Beijing Institute of Technology | 1 | 9.09 | 262 | 262 | 2019 |
| 4 | Michigan State University | 1 | 9.09 | 262 | 262 | 2019 |
| 5 | Chinese Academy of Sciences | 1 | 9.09 | 68 | 68 | 2017 |
| 6 | University of Missouri | 1 | 9.09 | 68 | 68 | 2017 |
| 7 | Koç University | 1 | 9.09 | 67 | 67 | 2019 |
| 8 | Max Planck Institute for Intelligent Systems | 1 | 9.09 | 67 | 67 | 2019 |
| 9 | The Hong Kong Polytechnic University | 1 | 9.09 | 40 | 40 | 2020 |
| 10 | Shenzhen Institute of Artificial Intelligenceand Robotics Society | 1 | 9.09 | 10 | 10 | 2021 |
《Figure 1.2.8》

Figure 1.2.8 Collaboration network among major institutions in the engineering research front of “dynamically reconfigurable mobile micro-robot swarms”
《Table 1.2.11》
Table 1.2.11 Countries with the greatest output of citing papers on “dynamically reconfigurable mobile micro-robot swarms”
| No. | Country | Citing papers | Percentage of citing papers/% | Mean year |
| 1 | China | 323 | 51.52 | 2020.8 |
| 2 | USA | 90 | 14.35 | 2020.8 |
| 3 | Germany | 42 | 6.7 | 2020.5 |
| 4 | Republic of Korea | 41 | 6.54 | 2020.8 |
| 5 | Switzerland | 24 | 3.83 | 2021 |
| 6 | Japan | 20 | 3.19 | 2021 |
| 7 | Canada | 19 | 3.03 | 2020.9 |
| 8 | Italy | 19 | 3.03 | 2020.7 |
| 9 | UK | 19 | 3.03 | 2020.7 |
| 10 | Netherlands | 15 | 2.39 | 2020.9 |
《Table 1.2.12》
Table 1.2.12 Institutions with the greatest output of citing papers on “dynamically reconfigurable mobile micro-robot swarms”
| No. | Institution | Citing papers | Percentage of citing papers/% | Mean year |
| 1 | The Chinese University of Hong Kong | 102 | 32.28 | 2020.5 |
| 2 | Chinese Academy of Sciences | 47 | 14.87 | 2020.8 |
| 3 | Harbin Institute of Technology | 40 | 12.66 | 2021 |
| 4 | Swiss Federal Institute of Technology | 21 | 6.65 | 2021.1 |
| 5 | Max Planck Institute for Intelligent Systems | 20 | 6.33 | 2020.4 |
| 6 | Tsinghua University | 17 | 5.38 | 2020.9 |
| 7 | Shenzhen Institute of Artificial Intelligence and Robotics | 15 | 4.75 | 2021.1 |
| 8 | City University of Hong Kong | 14 | 4.43 | 2021.1 |
| 9 | Beihang University | 14 | 4.43 | 2021.1 |
| 10 | Beijing Institute of Technology | 13 | 4.11 | 2020.9 |
《Figure 1.2.9》

Figure 1.2.9 Roadmap of the engineering research front of “dynamically reconfigurable mobile micro-robot swarms”
《2 Engineering development fronts》
2 Engineering development fronts
《2.1 Trends in Top 10 engineering development fronts》
2.1 Trends in Top 10 engineering development fronts
Top ten development (as opposed to research) fronts in mechanical and vehicle engineering are listed in Table 2.1.1. Some of these fronts are characterized by in-depth traditional research: “multi-robot collaborative operation optimization technology”, “unmanned aerial vehicle path planning technology”, “precision guidance technology for MUAV”1, “AI-based precise target recognition”, “multi-functional high-performance aerospace composites technology”, “micro high-performance combinational sensing technology”, and “control and perception system of intelligent mobile robot”. There are also other fronts that are newly emerging: “low-cost reusable spacecraft”, “underwater unmanned rescue vehicle”, “energy integration and propellant management technology for space transportation systems”. Table 2.1.2 shows the annual number of core patents published from
《Table 2.1.1》
Table 2.1.1 Top 10 engineering development fronts in mechanical and vehicle engineering
| No. | Engineering development front | Published patents | Citations | Citations per patent | Mean year |
| 1 | Multi-robot collaborative operation optimization technology | 465 | 1 943 | 4.18 | 2020.4 |
| 2 | Low-cost reusable spacecraft | 142 | 612 | 4.31 | 2019.9 |
| 3 | Underwater unmanned rescue vehicle | 185 | 512 | 2.77 | 2020 |
| 4 | Unmanned aerial vehicle path planning technology | 911 | 6 525 | 7.16 | 2020.5 |
| 5 | Precision guidance technology for MUAV | 483 | 1 932 | 4 | 2019.9 |
| 6 | AI-based precise target recognition | 615 | 1 340 | 2.18 | 2021.1 |
| 7 | Multi-functional high-performance aerospace composites technology | 1 102 | 5 777 | 5.24 | 2019.8 |
| 8 | Energy integration and propellant management technology for space transportation systems | 363 | 2 135 | 5.88 | 2019.8 |
| 9 | Micro high-performance combinational sensing technology | 205 | 245 | 1.2 | 2019.6 |
| 10 | Control and perception system of intelligent mobile robot | 569 | 6 729 | 11.83 | 2019.8 |
《Table 2.1.2》
Table 2.1.2 Annual number of core patents published for the Top 10 engineering development fronts in mechanical and vehicle engineering
| NO. | Engineering development front | 2017 | 2018 | 2019 | 2020 | 2021 | 2022 |
| 1 | Multi-robot collaborative operation optimization technology | 32 | 35 | 52 | 78 | 126 | 142 |
| 2 | Low-cost reusable spacecraft | 18 | 18 | 21 | 24 | 30 | 31 |
| 3 | Underwater unmanned rescue vehicle | 11 | 25 | 39 | 34 | 32 | 44 |
| 4 | Unmanned aerial vehicle path planning technology | 52 | 75 | 108 | 157 | 203 | 316 |
| 5 | Precision guidance technology for MUAV | 46 | 73 | 79 | 89 | 93 | 103 |
| 6 | AI-based precise target recognition | 4 | 14 | 39 | 112 | 168 | 278 |
| 7 | Multi-functional high-performance aerospace composites technology | 177 | 148 | 147 | 163 | 211 | 256 |
| 8 | Energy integration and propellant management technology for space transportation systems | 39 | 65 | 44 | 64 | 87 | 64 |
| 9 | Micro high-performance combinational sensing technology | 35 | 32 | 31 | 28 | 38 | 41 |
| 10 | Control and perception system of intelligent mobile robot | 58 | 93 | 82 | 119 | 108 | 109 |
2017 to 2022. “Multi-robot collaborative operation optimization technology”, “unmanned aerial vehicle path planning technology”, and “AI-based precise target recognition” are the most significant directions of patent disclosure in recent years.
(1) Multi-robot collaborative operation optimization technology
Multi-robot collaborative operation optimization technology refers to a technique that enhances overall efficiency and performance by coordinating the actions and decisions of multiple robots within a given task or work scenario. This technology is primarily applied in the fields of manufacturing, warehousing logistics, surveillance and reconnaissance, environmental sensing, and emergency search and rescue. It also covers several aspects, such as communication, cooperation, planning, and decision-making among multiple robots. Research in this area mainly focus on three aspects: ① cooperative transmission computing, wherein multiple robots share and transmit computing resources to enhance overall computational capabilities; ② distributed sensing, wherein multiple robots simultaneously engage in data collection and measurement within a work scenario to obtain accurate information about the environment or task status; and ③ cooperative control, which involves the development of control strategies and methods enabling multiple robots to cooperate and work together towards achieving common goals. In the future, multi-robot collaborative operation optimization technology is expected to evolve toward intelligence, cross-domain applications, multimodal sensing, human–machine collaboration, and learning. This development will promote the extensive utilization of robot systems across various domains, thus facilitating more efficient, secure, and intelligent cooperative operations.
(2) Low-cost reusable spacecraft
Given the increasing frequency of human space exploration and development activities, the current single-use spacecraft cannot easily meet the demand because of the high-cost and long preparation cycle. Therefore, reusable spacecraft, which can adapt to convenient and low-cost exploration, development, and utilization of space resources, has been receiving increasing attention. Reusable spacecraft is an advanced spacecraft application model that can effectively prolong the life, reduce the operation cost, and improve the reliability and convenience of spacecraft. All major space powers have taken reusable spacecraft as the key breakthrough direction for the sustainable development of space technology. Reusable manned spacecraft and cargo spacecraft, space shuttles, and reusable orbital maneuvering vehicles are typical reusable spacecraft. Reusable spacecraft is not a new concept, but it is extremely difficult to develop because of its huge difference from the traditional single-use spacecraft in design concepts and methods, posing a great challenge to the human science and technology development level. Recently, the key research directions in reusable spacecraft have included reusable design theory and method, reusable spacecraft integrated design, reliable and accurate return and landing technology, long-term on-orbit precise orbit/attitude/thermal control and maintenance technology, highly reliable and reusable high-temperature and ablative resistance thermal protection technology, structure life assessment, and health management technology.
(3) Underwater unmanned rescue vehicle
Underwater unmanned rescue vehicle (UURV) refers to a type of underwater vehicle equipped with underwater detection equipment and operation devices to perform emergency rescue tasks in the water. At present, typical UURVs are mainly developed from remotely operated vehicles (ROV). Compared with traditional underwater vehicles, the working environment of UURV is quite complicated and changeable, especially given the higher time requirements of task execution. To cope with the variety of rescue tasks, the configuration, operation mode, and control strategy of ROVs need to be optimized and upgraded.
At present, the main research highlights in this field include functional structure optimization of UURVs, multisource data fusion processing based on acoustic-optic sensors, integrated high-precision navigation and localization technology, and nonlinear model predictive control for the pose of UURVs. The multi-mode autonomous and remote UURV will be the future development trend in this field. It combines the advantages of remotely operated ROVs in local areas with the advantages of autonomous underwater vehicles (AUVs) that can navigate autonomously over a wide area. Specifically, the technology development trend includes the optimized design of variable configuration functional structure based on the bionic structure, the autonomous detection and recognition technology of underwater rescue targets based on multisource sensor data, and the autonomous decision technology of target rescue based on deep learning.
(4) Unmanned aerial vehicle path planning technology
Unmanned aerial vehicle (UAV) path planning technology aims to autonomously propose a secure and smooth trajectory from the starting point to the target by comprehensively considering task, environmental, and UAV dynamic constraints. Traditionally, path planning algorithms are commonly based on sampling, numerical optimization, and heuristic search methods, such as A*, rapid-exploration random tree, artificial potential field, dynamic programming, Bézier curve, genetic, and particle swarm optimization algorithms. Nevertheless, with the tremendous progresses in the maneuverability of UAVs and the increasingly severe and complex operating environments, the aforementioned routine algorithms face challenges in effectively addressing the requirements of real-time responsiveness, smoothness and security. Additionally, the existing methods are apt to fall into local optima, thus rendering the final destination unreachable. With the development of artificial intelligence (AI) technology represented by deep reinforcement learning, path planning using both Q-network and deep deterministic policy gradient has become a critical research topic. The merit of such a kind of algorithms lies in the elimination of prior knowledge and allowing for direct iterative training. They optimize decisions merely according to environmental feedback information, demonstrating superb generality and transferability. However, it is still arduous to design the reward function and to tune the parameters so as to guarantee convergence of the iterative learning procedures. Therefore, an inevitable tendency in this research field is to design fusion path planning algorithms that combine the virtues of traditional and novel AI-inspired algorithms. More precisely, through using traditional heuristic search algorithms for real-time planning of optimal paths and simultaneously integrating deep reinforcement learning algorithms to achieve autonomous collision avoidance in complex environments, it becomes tractable to break through the technical bottlenecks of both kinds of methods. Furthermore, lightweight path planning techniques, such as the dimensional reduction of UAV parameter space and high-quality modeling of feasible regions, have also received increasing research attentions. In recent years, given its unique self-attention mechanism, a promising Transformer architecture has been used in auto drive systems such as environmental perception and segmentation, target detection, tracking and positioning, path planning and decision-making modules. Accordingly, the Transformer architecture can be expected to become a new path planning paradigm for unmanned aerial vehicles.
(5) Precision guidance technology for MUAV
A miniature unmanned aerial vehicle (MUAV) is generally considered as a type of unmanned aerial vehicle (UAV) that is characterized by a typical size ranging from several centimeters to tens of centimeters and a maximum take-off weight ranging from several grams to dozens of kilograms. In addition, it typically possesses the following features: small volume, light weight, and super maneuverability. MUAV precision guidance technology refers to the use of MUAV as the application carrier for controlling guidance weapons and accurately hitting the target in a complex battlefield environment. The realization of MUAV precision guidance relies on the functions provided by MUAV, including target identification and tracking with characteristics from the target (e.g., reflection, scattering, and radiation), and the navigation information of the MUAV that leverages inertial and information support technologies. In a complex environment with terrain constraints, precision guidance technology can effectively improve the guidance accuracy of MUAVs, reduce the risk of accidental injuries, and expand war results, which are significant for anti-terrorism actions and military attacks. At present, research on MUAV precision guidance technology focuses on the fields of precision detection, comprehensive utilization of information support, and high-precision guidance control. As the emergence of novel models of manned/unmanned collaborative combat imposes the requirements of high stealth in air confrontation, high density in cluster confrontation, and high intelligence in attack–defense confrontation, the development direction of MUAVs in the future includes the following fields: ① compound guidance technology that improves the hit accuracy of MUAVs, ② intelligent recognition and cluster algorithm that improve the ability of collaborative combat in intelligent combat scenes, and ③ novel microstructure and materials that improve the stealth penetration ability of MUAVs.
(6) AI-based precise target recognition
The precise target recognition technology based on AI refers to utilizing the powerful learning and fitting capabilities of machine learning and pattern recognition to achieve accurate analysis of scene semantic information, including environmental perception, target extraction, segmentation, and tracking. It is often based on single sensors or their combinations, such as cameras, infrared EDM instruments, LIDAR, navigation radars, and millimeter wave radars, as information sources. In recent application scenes, the abruptly increasing complexities include abundant scene information, multiple target overlaps, and pose diversities, which are accompanied by severe limitations, such as occlusion, viewpoint distortion, sparkling lights, rains, fogs, vibrations, and other conditions. These adverse factors inevitably constrain the comprehensiveness and precision improvement of modern recognition systems. For example, unmanned surface vehicles (USVs) often face sudden marine accidents. The challenge lies in rapidly and accurately capturing and tracking tasks of emergent targets, which could not be fulfilled by traditional recognition algorithms. As a result, researchers turn to seek assistance from the superb feature extraction and spatial mapping capabilities of AI, with deep learning as a representative, to address the performance degradation problem caused by the abovementioned severe limitations. In previous years, such a promising Transformer architecture has been revolutionarily introduced into the field of target recognition. Its unique self-attention mechanism allows adaptively establishing multilevel, cross-space, and cross-temporal correlations in information, significantly improving recognition accuracy. Transformer architecture has replaced convolutions of deep learning and thus becomes a mainstream framework for new generation target recognition systems. Recently, the emergence of large language models has also shed new insights into target recognition. Researchers have begun to explore large models in the specified field of target recognition, which is no longer confined to specific tasks or scenarios. In brief, AI is the essential driving force for achieving precise target recognition. Current research focuses on various missions, including the application of instance segmentation based on the Transformer framework, the development of universal large models for target recognition scenarios, the construction of panoramic semantic recognition systems in complex environments, and the advancement of spatiotemporal alignment and fusion algorithms for multisource information. Transformer has even become a new environment perception paradigm for auto driving, which has profoundly changed the modern human life. In the future, in consideration of the increasing complexity of application scenes, new advanced AI technology will be developed to fulfill the upgrading mission for environmental perception and situational awareness.
(7) Multi-functional high-performance aerospace composites technology
Multi-functional composites offer not only excellent mechanical properties for aerospace vehicles but also bestow them with a range of functional properties, including wave-absorption, wave-transmission, thermal protection, conductivity, electromagnetic shielding, vibration reduction, and energy absorption. Moreover, the next generation of aerospace equipment designed and manufactured using these multi-functional composites demonstrates remarkable adaptability to complex flight environments, encompassing air, space, land, and sea integration, even in the face of drastic changes in temperature, humidity, and salinity. Consequently, this disruptive technology has garnered significant attention from major aerospace powers worldwide. The current research in high-performance multi-functional aerospace composite technology primarily centers around various aspects, including multi-scale and multi-physics analysis theory and modeling methods, the absorption mechanism of radar/infrared multi-spectrum composites, integrated design and additive manufacturing of function-material-structure composite systems, repairing mechanisms and manufacturing methods for self-diagnosing/self-repairing composites, and high-performance assembly techniques for multi-functional composite structures. Looking ahead, the development of high-performance multi-functional composites is anticipated to achieve breakthroughs in the following directions: ① leveraging machine learning approaches for multi-physics performance modeling and design methods of multi-functional composites; ② developing intelligent sensor- control-actuation integrated composite systems derived from environmentally sensitive materials; and ③ exploring high- performance and cost-effective natural materials for manufacturing lightweight, high-strength, and environmentally friendly multi-functional composites.
(8) Energy integration and propellant management technology for space transportation systems
The energy integration and propellant management technology for space shuttle transportation systems is a general term for a class of technologies that integrate and optimize multiple energy systems in space vehicles that travel between the Earth’s surface and orbit, and manage propellants safely and efficiently. Energy integration refers to the comprehensive consideration of the four links of energy supply, transmission and storage, terminal consumption and recovery, and the adoption of interrelated technologies and management measures in each link to achieve system optimization in the entire energy system as a whole. In-situ energy technology and equipment use extraterrestrial water ice resources and space hydrogen energy power integration technology for the precise matching, regulation, and efficient utilization of energy consumption in the space-to- space round-trip process, energy storage, distribution, dynamic organization, and production of energy. The main research direction of system energy integration is accurate prediction technology. Moreover, the main research directions of propellant management technology are the long-term on-orbit position management and heat management technology of cryogenic propellant, the space on-orbit cross-transfer technology of cryogenic propellant, and the modeling and simulation technology of the integrated fluid management (IVF) system. With the ever-increasing requirements for round-trip transport between the Earth and low Earth orbit, heavy-duty launch vehicles built with large-thrust engines and large-diameter structure technologies, new power, high-precision return control, and other technologies are used to develop reusable vehicles. In addition, energy integration and low-temperature propellant long-term technologies, such as on-orbit management, are receiving increasing attention.
(9) Micro high-performance combinational sensing technology
As the only functional device for information acquisition and data collection, sensing technology is one of the core technologies in the era of digital economy and one of the cornerstones of intelligent manufacturing and information technology. At present, robots, smart manufacturing, smart transportation, smart cities, and wearable technology are developing rapidly, requiring sensing technology to develop in the direction of miniaturization, high performance, low power consumption, intelligence, integration, and low cost. Micro high-performance combinational sensing technology integrates various miniature high- performance sensing functions to achieve accurate measurement of multiple-type and/or multi-dimensional physical signals on a small chip. Combinational sensing technology can be realized by micro-machining technology through the integration of multi- functional micro-sensing chips with different functions. This technology has the characteristics of high integration level, small size, and mutual compensation and correction between different sensing functions, which allow highly accurate data acquisition with great completeness. With the rapid development of micro-nano manufacturing, multi-functional composite, precision packaging, and digital compensation technologies, new sensing principles, materials, and processes are constantly emerging, enabling the development of new types of sensing elements with new principles and effects. This development trend also continuously promotes the integration of more sensor units/functions, which has become the main research hotspot and development direction of the current miniature high-performance compound sensor technology.
(10) Control and perception systems of intelligent mobile robots
Control and perception systems are crucial for intelligent mobile robots to achieve environmental awareness, dynamic decision making and planning, and behavior execution. These systems primarily consist of sensory modules and computation and decision- making modules. For successful navigation in unknown or dynamic environments, robots need to have accurate perception of their surroundings. This perceptual information is further used for the robot’s decision making and action execution. As mobile robots find widespread applications, the demand for their intelligence grows. Deep learning and perception, simultaneous localization and mapping (SLAM), reinforcement learning and control, multi-modal perception and sensor fusion, human–robot interaction and collaboration, robotic swarm coordination, edge computing and perception, and bio-inspired methods are currently the major research hotspots in this field. Considering the uncertainty and dynamism of real-world environments, ensuring that robots maintain stable and effective operations in complex and changing settings is a significant research direction. As robots become more prevalent in public spaces and homes, concerns about their operational safety and ethical issues are increasingly gaining attention.
《2.2 Interpretations for three key engineering development fronts》
2.2 Interpretations for three key engineering development fronts
2.2.1 Multi-robot collaborative operation optimization technology
Multi-robot collaborative operation optimization technology refers to the methodologies and techniques employed to enhance overall work efficiency and performance in scenarios involving the use of multiple robots. The primary objective of this technology is to facilitate effective coordination and cooperation among robots through efficient task planning, resource allocation, decision- making, and coordination mechanisms, among others. Furthermore, this kind of optimization technology aims to enable multiple robots to collaborate more efficiently and accomplish complex tasks together through the application of rational algorithms and strategies. This technology finds its principal applications within various sectors, including manufacturing, warehousing logistics, surveillance and reconnaissance, environmental sensing, and emergency search and rescue. It also encompasses various aspects involving communication, cooperation, planning, and decision-making among multiple robots.
Multi-robot collaborative operation is a multidisciplinary cross-cutting technology at the scientific frontier. It combines interdisciplinary frontier technologies and covers categories, such as game theory and operations research in artificial intelligence. It is also closely related to numerous disciplines, such as complex systems, information theory, and control theory. Thus, it is also recognized as an international challenge. In particular, the optimization of multi-robot collaborative operation urgently needs to address three scientific and technological challenges. The first set of challenges deals with the integration of efficient transmission–computation collaborative mechanisms for multiple robots. This involves research on low-latency, high-reliability communication network theory for multi-robot collaborative operation in complex tasks, efficient cross-layer heterogeneous data communication and sharing methods, as well as the establishment of an integrated communication network for multi-robot collaborative operation to guarantee high real-time and reliable information transmission and computation.
The second set of challenges deals with mechanisms for large-scale precise perception and distributed feature recognition. It involves exploring quantitative descriptions and coupled transmission mechanisms of temporal–spatial perception errors of multiple robots; clarifying the mechanisms of large-scale autonomous collaborative measurement and information fusion of heterogeneous sensors; establishing task-driven multiscale, multi-objective identification general models, and continuous cognitive learning architectures for complex tasks; and forming multi-robot embodied perception and embodied intelligence for complex tasks.
The final set of challenges deals with perception–cognition–decision–control collaborative operation mechanism. In particular, it involves building system models that integrate task data and mechanistic knowledge; establishing safe, efficient, robust, and scalable task scheduling and dynamic programming systems to ensure orderly operation of large-scale complex tasks; establishing mechanisms for multi-robot autonomous decision-making to adapt to the strong time-varying dynamic interaction demands between multiple robots and complex environments; constructing a multi-process full-link collaborative operation model; exploring self-optimization mechanisms for parameters of multi-robot collaborative operation systems; and finally, improving the accuracy, stability, and safety of multi-robot system operations.
In summary, the optimization technology for multi-robot collaborative operation can improve production efficiency and product quality, reduce operation costs, and minimize personnel risks. Therefore, it has broad application prospects in the fields of industrial production, agriculture, logistics, healthcare, and others. Furthermore, it is one of the important underlying technologies that can help promote intelligent manufacturing and smart societies.
Currently, the country with the largest number of core patents published in this field is China, and the top country with the highest average citations per paper is Republic of Korea, as shown in Table 2.2.1. Cooperation can be observed between India, Peru, and Malaysia. And cooperation can also be observed between India and Sweden, as shown in Figure 2.2.1. The top three institutions with the largest number of core patents are Beijing Institute of Technology, Guangzhou Institute of Advanced Technology, Chinese Academy of Sciences, and 3MTOP Company Limited, respectively, as shown in Table 2.2.2. No cooperation can be observed between the institutions with core patent disclosures. Figure 2.2.2 shows the roadmap of the engineering development front of “multi-robot collaborative operation optimization technology”.
《Table 2.2.1》
Table 2.2.1 Countries with the greatest output of core patents on “multi-robot collaborative operation optimization technology”
| No. | Country | Published patents | Percentage of published patents/% | Citations | Percentage of citations/% | Citations per patent |
| 1 | China | 416 | 89.46 | 1 518 | 78.13 | 3.65 |
| 2 | USA | 26 | 5.59 | 207 | 10.65 | 7.96 |
| 3 | Republic of Korea | 14 | 3.01 | 197 | 10.14 | 14.07 |
| 4 | India | 6 | 1.29 | 9 | 0.46 | 1.5 |
| 5 | Colombia | 2 | 0.43 | 12 | 0.62 | 6 |
| 6 | Switzerland | 1 | 0.22 | 0 | 0 | 0 |
| 7 | Malaysia | 1 | 0.22 | 0 | 0 | 0 |
| 8 | Peru | 1 | 0.22 | 0 | 0 | 0 |
| 9 | Sweden | 1 | 0.22 | 0 | 0 | 0 |
《Figure 2.2.1》

Figure 2.2.1 Collaboration network among major countries in the engineering development front of “multi-robot collaborative operation optimization technology”
《Table 2.2.2》
Table 2.2.2 Institutions with the greatest output of core patents on “multi-robot collaborative operation optimization technology”
| No. | Institution | Published patents | Percentage of published patents/% | Citations | Percentage of citations/% | Citations per patent |
| 1 | Beijing Institute of Technology | 19 | 4.09 | 46 | 2.37 | 2.42 |
| 2 | Guangzhou Institute of Advanced Technology, Chinese Academy of Sciences | 12 | 2.58 | 44 | 2.26 | 3.67 |
| 3 | 3MTOP Company Limited | 12 | 2.58 | 3 | 0.15 | 0.25 |
| 4 | The Boeing Company | 11 | 2.37 | 66 | 3.4 | 6 |
| 5 | Hunan University | 10 | 2.15 | 21 | 1.08 | 2.1 |
| 6 | Nanjing University of Aeronautics and Astronautics | 10 | 2.15 | 7 | 0.36 | 0.7 |
| 7 | Southeast University | 9 | 1.94 | 107 | 5.51 | 11.89 |
| 8 | Harbin Institute of Technology | 8 | 1.72 | 91 | 4.68 | 11.38 |
| 9 | Xidian University | 8 | 1.72 | 42 | 2.16 | 5.25 |
| 10 | Harbin Engineering University | 8 | 1.72 | 34 | 1.75 | 4.25 |
《Figure 2.2.2》

Figure 2.2.2 Roadmap of the engineering development front of “multi-robot collaborative operation optimization technology”
2.2.2 Low-cost reusable spacecraft
With the continuous expansion of space activities and the steady increase in launch frequency, the high cost of traditional expendable spacecraft has become a key factor restricting the development of space exploration. To overcome this challenge, reusable technology is considered one of the main approaches to reducing operational costs and enhancing the sustainability of space technology. In recent years, various spacefaring nations have actively explored the development of reusable spacecraft and proposed corresponding development roadmaps, achieving significant accomplishments in this field. Notable examples include USA’s SpaceX Dragon spacecraft and Boeing CST-100, China’s Shenzhou spacecraft, Russia’s Soyuz MS spacecraft, and Blue Origin’s New Shepard suborbital spacecraft. These spacecrafts emphasize the concept of reusability, making breakthroughs in design principles and methodologies, such as streamlined structures, autonomous control, vertical landings, and optimized materials. Consequently, they have successfully undergone recovery and reuse after completing their missions.
In the future, reusable space vehicles will primarily be applied to near-earth orbital missions and interplanetary transport missions. Compared with traditional disposable space vehicles, these spacecrafts undergo significant paradigm shifts in design concepts and methodologies. Currently, the focus of reusable technology remains on component-level reuse, where certain functional units undergo reusability assessments and continue to serve their original purposes after direct or minor repairs on new space vehicles. However, achieving spacecraft-level reusability still presents challenges. Therefore, considering the developmental trajectories of leading spacefaring nations, the advancement of reusable space vehicles across different mission levels requires concentrated breakthroughs in a set of common key technologies.
The primary focus lies in the key technology of overall design, where it is essential to establish a technical theoretical system for reusable space vehicles. This task involves optimizing and demonstrating the overall scheme from aspects such as technical risks, reliability, safety, and economic benefits. Specific areas of research encompass mission planning, overall layout, health management, system and subsystem reliability modeling and assessment, and experimental verification. Next, the hardware components critical for achieving spacecraft reusability consist of the propulsion system, the shock-resistant structure, lightweight ablative materials, and precise non-destructive landing and recovery technology. The development of the propulsion system will address degradation reduction, the thermal protection of combustion chambers, and power adjustment techniques. Advancements in structures and materials will focus on efficient load- bearing, integrated and sealed structures, and lightweight ablative materials. For precise non-destructive landing, challenges such as coordinating multiple engines for retro-thrust deceleration, vector control, non-destructive testing, and designing reusable buffers with anti-fatigue and durability properties must be overcome. Furthermore, intelligent measurement and automation decision control technology will be of utmost importance during mission execution because it will determine the precision of orbital maneuver control and re-entry guidance, ensuring compliance with environmental adaptability requirements throughout the entire lifecycle.
The countries with the largest number of core patents published in this field are China, USA, and Russia; the top country with the highest citations per paper is France, as shown in Table 2.2.3. No cooperation can be observed between the countries with core patents. The top two institutions with the highest number of patents are Aerospace Research Institute of Special Materials and Processing Technology and Boeing Company, as shown in Table 2.2.4. Cooperation can be observed between Johann Haltermann Limited and Monument Chemical Houston Limited Liability Company, as shown in Figure 2.2.3. Figure 2.2.4 shows the roadmap of the engineering development front of “low-cost reusable spacecraft”.
《Table 2.2.3》
Table 2.2.3 Countries with the greatest output of core patents in the engineering development front of “low-cost reusable spacecraft”
| No. | Country | Published patents | Percentage of published patents/% | Citations | Percentage of citations/% | Citations per patent |
| 1 | China | 72 | 50.7 | 327 | 53.43 | 4.54 |
| 2 | USA | 30 | 21.13 | 81 | 13.24 | 2.7 |
| 3 | Russia | 14 | 9.86 | 7 | 1.14 | 0.5 |
| 4 | France | 12 | 8.45 | 170 | 27.78 | 14.17 |
| 5 | Spain | 6 | 4.23 | 23 | 3.76 | 3.83 |
| 6 | Germany | 4 | 2.82 | 0 | 0 | 0 |
| 7 | Colombia | 2 | 1.41 | 0 | 0 | 0 |
| 8 | India | 1 | 0.7 | 0 | 0 | 0 |
《Table 2.2.4》
Table 2.2.4 Institutions with the greatest output of core patents in the engineering development front of “low-cost reusable spacecraft”
| No. | Institution | Published patents | Percentage of published patents/% | Citations | Percentage of citations/% | Citations per patent |
| 1 | Aerospace Research Institute of Special Materials and Processing Technology | 24 | 16.9 | 170 | 27.78 | 7.08 |
| 2 | Boeing Company | 11 | 7.75 | 4 | 0.65 | 0.36 |
| 3 | European Aeronautic Defence and Space Company | 8 | 5.63 | 160 | 26.14 | 20 |
| 4 | Johann Haltermann Limited | 8 | 5.63 | 0 | 0 | 0 |
| 5 | Monument Chemical Houston Limited Liability Company | 8 | 5.63 | 0 | 0 | 0 |
| 6 | Pangea Aerospace | 7 | 4.93 | 27 | 4.41 | 3.86 |
| 7 | Beijing Xingji Rongyao Space Technology Company Limited | 5 | 3.52 | 35 | 5.72 | 7 |
| 8 | Beijing Space Vehicle General Design Department | 5 | 3.52 | 4 | 0.65 | 0.8 |
| 9 | Nanjing University of Aeronautics and Astronautics | 4 | 2.82 | 26 | 4.25 | 6.5 |
| 10 | ArianeGroup SAS | 4 | 2.82 | 10 | 1.63 | 2.5 |
《Figure 2.2.3》

Figure 2.2.3 Collaboration network among major institutions in the engineering development front of “low-cost reusable spacecraft”
《Figure 2.2.4》
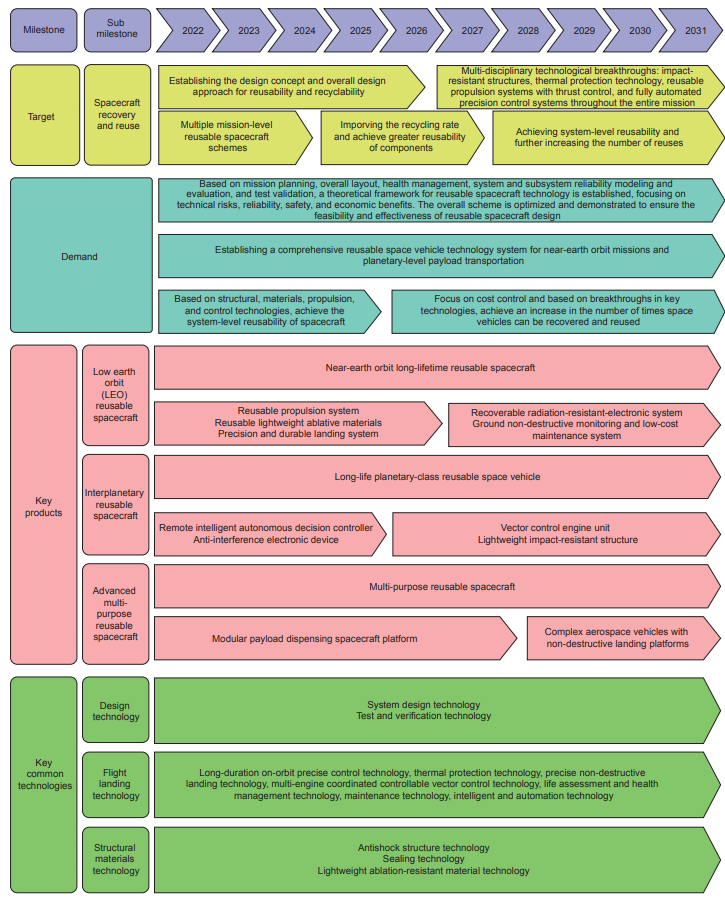
Figure 2.2.4 Roadmap of the engineering development front of “low-cost reusable spacecraft”
2.2.3 Underwater unmanned rescue vehicle
With the growth of human activities such as offshore trade, marine surveys, and marine resources exploitation, the occurrence of accidents in the ocean has increased in frequency. These accidents have caused great losses to the economic development of the country. Utilizing advanced emergency rescue equipment to carry out rescue activities is of great significance in improving the effectiveness of rescue missions, reducing losses in accidents, and saving lives. As the complexity and variability of the underwater operating environment, the executive efficiency and actual effect of underwater emergency rescue missions are not as expected. Underwater unmanned rescue vehicles (UURVs) have progressively played a major role in the underwater emergency rescue equipment system owing to their advantages of strong operational capability and high autonomy. From the 1970s when the first UURV appeared to the present, with the development of sensors and intelligent control technology, the autonomy and operational capabilities of UURVS have been remarkably improved. Their roles in underwater emergency rescue missions have become vital.
To cope with diversified rescue demands and strict environments, the intelligent control strategy, environment perception, and self-learning of UURVs have become the current research hot topics in underwater robotics. The research on UURVs in China started relatively later but has been developing rapidly in recent years. The related research is mainly in three aspects. First is the structural aspect, particularly the application of new types of mechanisms, new materials, and new drives to the mechanism design of UURVs. The optimized design of bionic-structure-based variable configuration functional structure, multi-mode function fusion, and reconfigurable modular design are the development trends in this aspect. Second is the environmental adaptability aspect. Through multi-sensor fusion technology, high-efficiency information acquisition and processing technology, and multi- task parallelism dynamic analysis, accurate environmental sensing in the complex marine environment is realized. Multi-source data fusion processing technology based on acoustic and optical sensors and multi-source sensor data-based target detection and recognition technology are the development trends in this aspect. Third is the intelligent development aspect. Through related technologies such as dynamic probabilistic network decision-making methods and reinforcement learning methods, efficient autonomous decision-making control under complex tasks is achieved. The nonlinear model predictive control for the pose and the autonomous decision technology of target rescue based on deep learning are the trends in this aspect. In conclusion, UURV technology has important research value in control engineering, sensors, artificial intelligence, and other multidisciplinary fields. Exploring it also has great practical meaning for guaranteeing the safety of maritime activities and improving the level of underwater emergency rescue in China.
The country with the largest number of core patents published in this field is China, and the top country with the highest citations per paper is USA, as shown in Table 2.2.5. No cooperation can be observed between the countries with core patents. The top institution with the highest number of patent is Yuhong (Nanjing) Technology Company Limited, as shown in Table 2.2.6. Cooperation can be observed between Beibu Gulf University, Guangzhou Shunhai Shipbuilding Company Limited, and South China University of Technology, as shown in Figure 2.2.5. Figure 2.2.6 shows the roadmap of the engineering development front of “underwater unmanned rescue vehicle”.
《Table 2.2.5》
Table 2.2.5 Countries with the greatest output of core patents in the engineering development front of “underwater unmanned rescue vehicle”
| No. | Country | Published patents | Percentage of published patents/% | Citations | Percentage of citations/% | Citations per patent |
| 1 | China | 178 | 96.22 | 454 | 88.67 | 2.55 |
| 2 | USA | 2 | 1.08 | 58 | 11.33 | 29 |
| 3 | Republic of Korea | 2 | 1.08 | 0 | 0 | 0 |
| 4 | Poland | 1 | 0.54 | 0 | 0 | 0 |
| 5 | Russia | 1 | 0.54 | 0 | 0 | 0 |
| 6 | Turkey | 1 | 0.54 | 0 | 0 | 0 |
《Table 2.2.6》
Table 2.2.6 Institutions with the greatest output of core patents in the engineering development front of “underwater unmanned rescue vehicle”
| No. | Institution | Published patents | Percentage of published patents/% | Citations | Percentage of citations/% | Citations per patent |
| 1 | Yuhong (Nanjing) Technology Company Limited | 5 | 2.7 | 0 | 0 | 0 |
| 2 | Wenzhou Yinuoweite Technology Company Limited | 4 | 2.16 | 16 | 3.12 | 4 |
| 3 | Jiangsu University of Science and Technology | 4 | 2.16 | 15 | 2.93 | 3.75 |
| 4 | Shenzhen Gaodu Innovation Technology Company Limited | 4 | 2.16 | 12 | 2.34 | 3 |
| 5 | Zhejiang Chuangzhiguo Enterprise Management Consulting Company Limited | 4 | 2.16 | 8 | 1.56 | 2 |
| 6 | Bestway Marine & Energy Technology Company Limited | 3 | 1.62 | 25 | 4.88 | 8.33 |
| 7 | Guilin University of Electronic Technology | 3 | 1.62 | 17 | 3.32 | 5.67 |
| 8 | Beibu Gulf University | 3 | 1.62 | 13 | 2.54 | 4.33 |
| 9 | Guangzhou Shunhai Shipbuilding Company Limited | 3 | 1.62 | 13 | 2.54 | 4.33 |
| 10 | South China University of Technology | 3 | 1.62 | 13 | 2.54 | 4.33 |
《Figure 2.2.5》
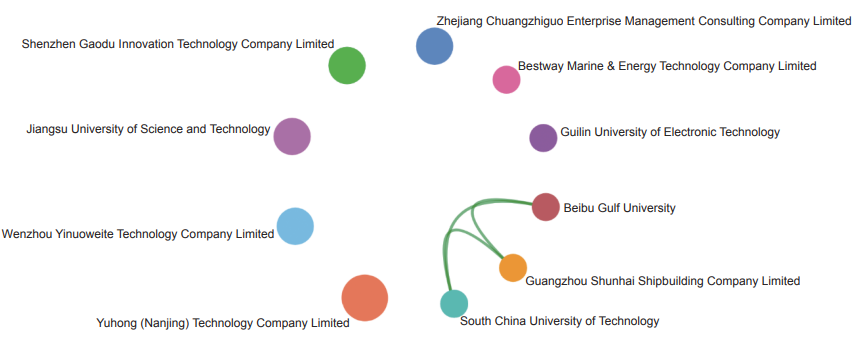
Figure 2.2.5 Collaboration network among major institutions in the engineering development front of “underwater unmanned rescue vehicle”
《Figure 2.2.6》
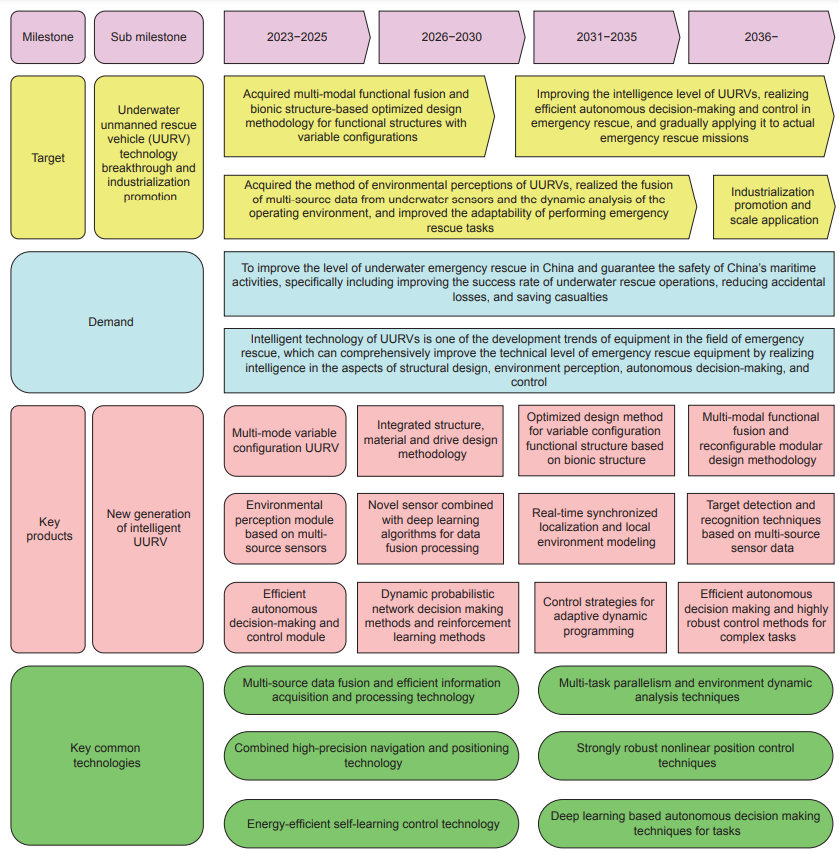
Figure 2.2.6 Roadmap of the engineering development front of “underwater unmanned rescue vehicle”
Participants of the Field Group
Leaders
Li Peigen, Guo Dongming
Academicians
YOU Zheng, DING Han, YAN Xinping, WANG ShuXin, CHEN Xuedong1, JIN Donghan, ZHU Kun, WANG Guoqing,
XIAO Longxu, GE Shirong, CHEN Xuedong2, SHAN Zhongde
Other Experts
SHI Tielin, XIA Qi, LONG Hu, LIU Zhiyong, LI Renfu, HUA Lin, WANG Yu, LUO Xin, LI Xiwen, SUN Bo, HUANG Yongan,
LI Kan, ZHANG Chi, LIANG Jianqiang, ZHANG Hui, YAN Chunze, XIANG Xianbo, LI Jinhua, CHEN Xuefeng,
ZHANG Xiaoming, TAO Bo, LIU Xiaowei, LI Baoren, ZHANG Jianxing, YUAN Weizheng, ZHANG Haitao, HUANG Zhihui,
DING Jia’ning, XIA Liang, HOU Yuliang, LI Xiwen, WANG Xuelin, XIONG Caihua
Report Writers
LI Renfu, WANG Yu, LUO Xin, HUANG Yongan, LI Kan, ZHANG Chi, ZHANG Hui, LIU Jialun, YAN Chunze, XIANG Xianbo,
HOU Zengguang, CHEN Xuefeng, ZHANG Xiaoming, TAO Bo, LIU Xiaowei, LI Baoren, ZHANG Jianxing,
YUAN Weizheng, ZHANG Haitao, HUANG Zhihui, DING Jia’ning, HOU Yuliang, WANG Xuelin, CHEN Wenbin,
SHI Tielin, CHEN Xixi
1 MUAV: miniature unmanned aerial vehicle.
1 HeFei General Machinery Research Institute.
2 Huazhong University of Science and Technology.











 京公网安备 11010502051620号
京公网安备 11010502051620号




