2019年 第5卷 第3期
《工程(英文)》 >> 2019年 第5卷 第3期 doi: 10.1016/j.eng.2018.11.033
一种使用光学可控生物致动器的微蠕动泵
a Department of Mechanical Engineering, Osaka University, Osaka 565-0871, Japan
b Department of Applied Biological Sciences, Tokyo University of Agriculture and Technology, Tokyo 183-8509, Japan
下一篇 上一篇
摘要
蠕动在自然界中广泛存在,这种将营养输送到身体各个部位的泵送活动在消化系统中是重要的。在本文中,我们提出了一种由肌肉驱动的管状微型泵,这种微型泵可以用于蠕动输送。我们利用在骨骼肌细胞膜上表达光敏感通道-2(ChR2)的果蝇幼虫获得具有光响应性的肌肉组织。幼虫在蓝光刺激下强制性地表现出肌肉收缩。在改变传播光刺激的速度的同时,我们观察到收缩的肌肉组织表面出现了位移。我们通过将幼虫解剖成管状结构以获得蠕动泵。解剖得到的管状结构的平均内径约为400 μm,平均外径约为750 μm。可以用相同的蓝光刺激来控制这些管状结构的收缩。为了观察内部流动,我们将微珠放入蠕动泵中,并确认泵可以以120 μm·s–1的速度输送微珠。
图片

图1

图2
图3

图4

图5

图6

图7

图8

图9
图10
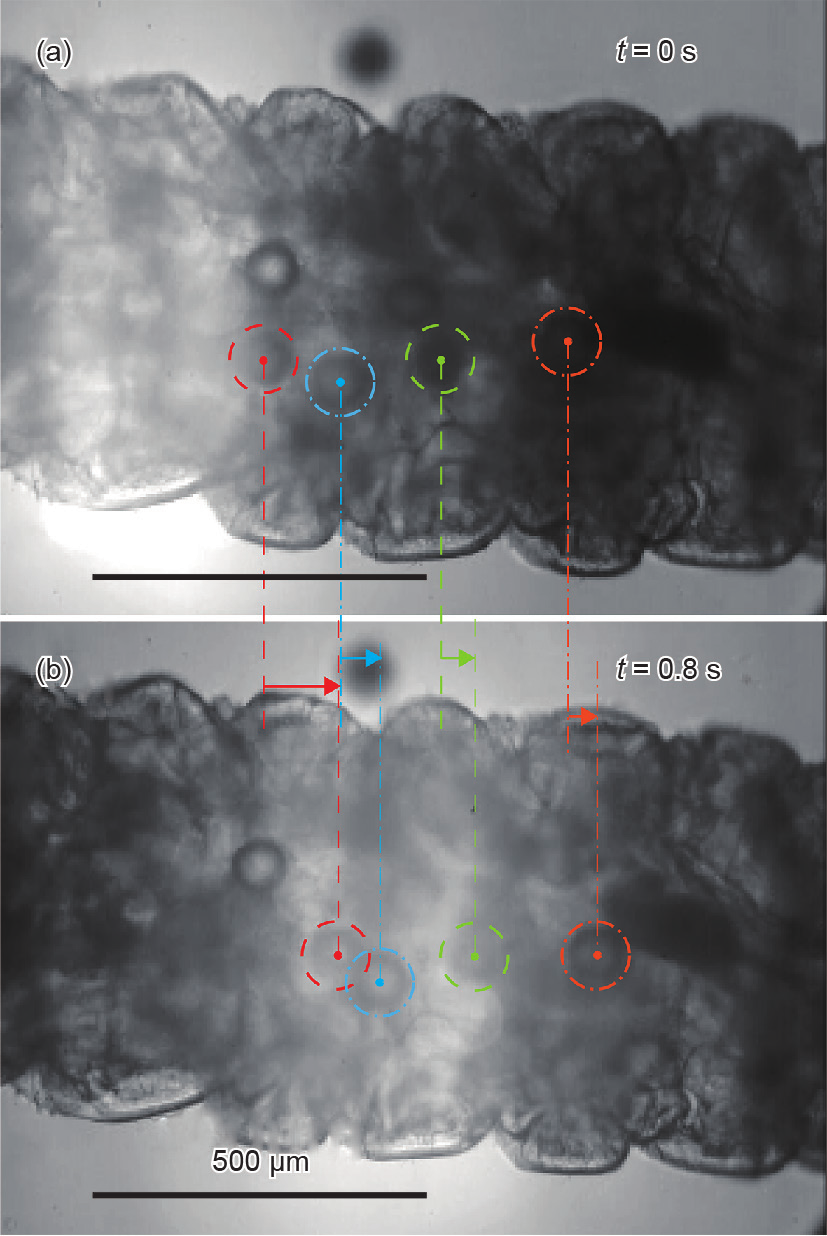
图11
参考文献
[ 1 ] Tanaka Y, Morishima K, Shimizu T, Kikuchi A, Yamato M, Okano T, et al. An actuated pump on-chip powered by cultured cardiomyocytes. Lab Chip 2006;6 (3):362–8. 链接1
[ 2 ] Akiyama Y, Sakuma T, Funakoshi K, Hoshino T, Iwabuchi K, Morishima K. Atmospheric-operable bioactuator powered by insect muscle packaged with medium. Lab Chip 2013;13(24):4870–80. 链接1
[ 3 ] Nawroth JC, Lee H, Feinberg AW, Ripplinger CM, McCain ML, Grosberg A, et al. A tissue-engineered jellyfish with biomimetic propulsion. Nat Biotechnol 2012;30(8):792–7. 链接1
[ 4 ] Chan V, Park K, Collens MB, Kong H, Saif TA, Bashir R. Development of miniaturized walking biological machines. Sci Rep 2012;2:857. 链接1
[ 5 ] Chan V, Jeong JH, Bajaj P, Collens M, Saif T, Kong H, et al. Multi-material biofabrication of hydrogel cantilevers and actuators with stereolithography. Lab Chip 2012;12(1):88–98. 链接1
[ 6 ] Kim J, Park J, Yang S, Baek J, Kim B, Lee SH, et al. Establishment of a fabrication method for a long-term actuated hybrid cell robot. Lab Chip 2007;7 (11):1504–8. 链接1
[ 7 ] Xi J, Schmidt JJ, Montemagno CD. Self-assembled microdevices driven by muscle. Nat Mater 2005;4(2):180–4. 链接1
[ 8 ] Fujita H, Shimizu K, Nagamori E. Novel method for measuring active tension generation by C2C12 myotube using UV-crosslinked collagen film. Biotechnol Bioeng 2010;106(3):482–9. 链接1
[ 9 ] Morimoto Y, Kato-Negishi M, Onoe H, Takeuchi S. Three-dimensional neuronmuscle constructs with neuromuscular junctions. Biomaterials 2013;34 (37):9413–9. 链接1
[10] Caldwell DG. Natural and artificial muscle elements as robot actuators. Mechatronics 1993;3(3):269–83. 链接1
[11] Hunter IW, Lafontaine S. A comparison of muscle with artificial actuators. In: Proceedings of Technical Digest IEEE Solid-State Sensor and Actuator Workshop; 1992 Jun 22–25; Hilton Head Island, SC, USA. Piscataway: IEEE; 1992. p. 178–85. 链接1
[12] Akiyama Y, Odaira K, Sakiyama K, Hoshino T, Iwabuchi K, Morishima K. Rapidly-moving insect muscle-powered microrobot and its chemical acceleration. Biomed Microdev 2012;14(6):979–86. 链接1
[13] Akiyama Y, Iwabuchi K, Furukawa Y, Morishima K. Electrical stimulation of cultured lepidopteran dorsal vessel tissue: an experiment for development of bioactuators. In Vitro Cell Dev Biol-Animal 2010;46:411–5. 链接1
[14] Sakar MS, Neal D, Boudou T, Borochin MA, Li Y, Weiss R, et al. Formation and optogenetic control of engineered 3D skeletal muscle bioactuators. Lab Chip 2012;12(23):4976–85. 链接1
[15] Beh SP, Hirooka M, Hoshino T, Hoshino K, Akiyama Y, Tsujimura H, et al. Visual servo of muscle-powered optogenetic bioactuator. In: Proceedings of 2013 Transducers & Eurosensors XXVII: the 17th International Conference on Solid-State Sensors, Actuators and Microsystems; 2013 Jun 16–20; Barcelona, Spain. Piscataway: IEEE; 2013. p. 1444–7. 链接1
[16] Yamatsuta E, Beh SP, Morishima K. Living peristaltic micro conveyor tube of optogenetically controllable bioactuator. In: Proceedings of the 18th International Conference on Solid-State Sensors, Actuators and Microsystems; 2015 Jun 21–25; Anchorage, AK, USA. Piscataway: IEEE; 2015. p. 827–30. 链接1
[17] Park SJ, Gazzola M, Park KS, Park S, Di Santo V, Blevins EL, et al. Phototactic guidance of a tissue-engineered soft-robotic ray. Science 2016;353 (6295):158–62. 链接1
[18] Boyden ES, Zhang F, Bamberg E, Nagel G, Deisseroth K. Millisecond-timescale, genetically targeted optical control of neural activity. Nat Neurosci 2005;8 (9):1263–8. 链接1
[19] Zhang F, Aravanis AM, Adamantidis A, de Lecea L, Deisseroth K. Circuitbreakers: optical technologies for probing neural signals and systems. Nat Rev Neurosci 2007;8(8):577–81. Erratum in: Nat Rev Neurosci 2007;8(9):732. 链接1
[20] Shimizu M, Yawata S, Miyamoto K, Miyasaka K, Asano T, Yoshinobu T, et al. Toward biorobotic systems with muscle cell actuators. In: Proceedings of the 5th International Symposium on Adaptive Motion of Animals and Machines; 2011 Oct 11–14; Hyogo, Japan; 2011. p. 87–8.
[21] Asano T, Ishizuka T, Morishima K, Yawo H. Optogenetic induction of contractile ability in immature C2C12 myotubes. Sci Rep 2015;5:8317. 链接1
[22] Nakamura T, Iwanaga T. Locomotion strategy for a peristaltic crawling robot in a 2-dimensional space. In: Proceedings of 2008 IEEE International Conference on Robotics and Automation; 2008 May 19–23; Pasadena, CA, USA. Piscataway: IEEE; 2008. p. 238–43. 链接1
[23] Kishi T, Ikeuchi M, Nakamura T. Development of a peristaltic crawling inspection robot for 1-inch gas pipes with continuous elbows. In: Proceedings of 2013 IEEE/RSJ International Conference on Intelligent Robots and Systems; 2013 Nov 3–7; Tokyo, Japan. Piscataway: IEEE; 2013. p. 3297–302. 链接1
[24] Saga N, Nakamura T. Development of a peristaltic crawling robot using magnetic fluid on the basis of the locomotion mechanism of the earthworm. Smart Mater Struct 2004;13(3):566–9. 链接1
[25] Seok S, Onal CD, Wood R, Rus D, Kim S. Peristaltic locomotion with antagonistic actuators in soft robotics. In: Proceedings of 2010 IEEE International Conference on Robotics and Automation; 2010 May 3–7; Anchorage, AK, USA. Piscataway: IEEE; 2004. p. 3282–7. 链接1
[26] Menciassi A, Gorini S, Pernorio G, Dario P. A SMA actuated artificial earthworm. In: Proceedings of 2004 IEEE International Conference on Robotics and Automation; 2004 Apr 26–May 1; New Orleans, LA, USA. Piscataway: IEEE; 2004. p. 3282–7. 链接1
[27] Xie J, Shih J, Lin Q, Yang B, Tai YC. Surface micromachined electrostatically actuated micro peristaltic pump. Lab Chip 2004;4(5):495–501. 链接1
[28] Orfanos Z. Transgenic tools for Drosophila muscle research. J Muscle Res Cell Motil 2008;29(6–8):185–8. 链接1
[29] Pulver SR, Pashkovski SL, Hornstein NJ, Garrity PA, Griffith LC. Temporal dynamics of neuronal activation by channelrhodopsin-2 and TRPA1 determine behavioral output in Drosophila larvae. J Neurophysiol 2009;101(6):3075–88. 链接1
[30] Park J, Kim IC, Baek J, Cha M, Kim J, Park S, et al. Micro pumping with cardiomyocyte-polymer hybrid. Lab Chip 2007;7(10):1367–70. 链接1











 京公网安备 11010502051620号
京公网安备 11010502051620号




