
2024年 第26卷 第1期
《中国工程科学》 >> 2024年 第26卷 第1期 doi: 10.15302/J-SSCAE-2024.01.013
多机协同智能发展战略研究
下一篇 上一篇
摘要
多个自主智能系统通过信息、行为交互构成的多机协同智能,代表着未来智能系统的必然发展趋势,是我国新一代人工智能规划部署的主攻方向,也是支撑国防、社会安全的核心技术和推动制造业由大到强的必由之路。开展突破多机协同智能技术发展研究,对于推动我国军事智能、智能产业高质量发展、加快工业转型升级具有重要意义。本文基于多机协同智能系统当前面临的难以适应复杂任务这一挑战,从基础理论和核心关键技术两个层面出发,系统地梳理了多机协同智能的研究现状,分析了制约基础理论与关键技术发展的主要瓶颈性问题,并以多机协同智能制造为典型应用,剖析理论与技术发展中存在的问题。研究认为,多机协同智能将朝着人机群组智能的方向发展,为抢占发展先机,需及早布局人机群组智能的基础理论探索,加速核心技术突破,并加快应用示范。
图片
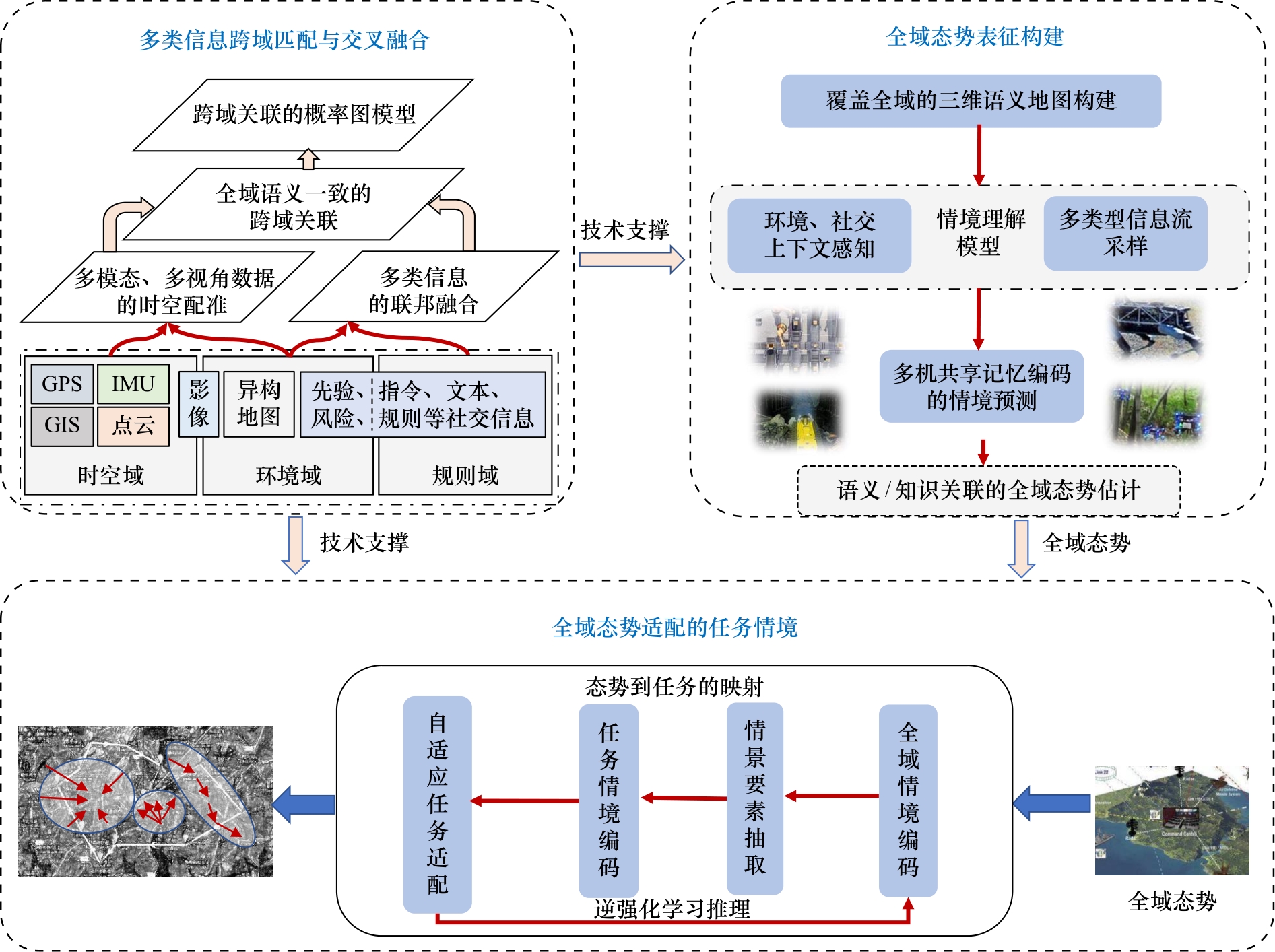
图1
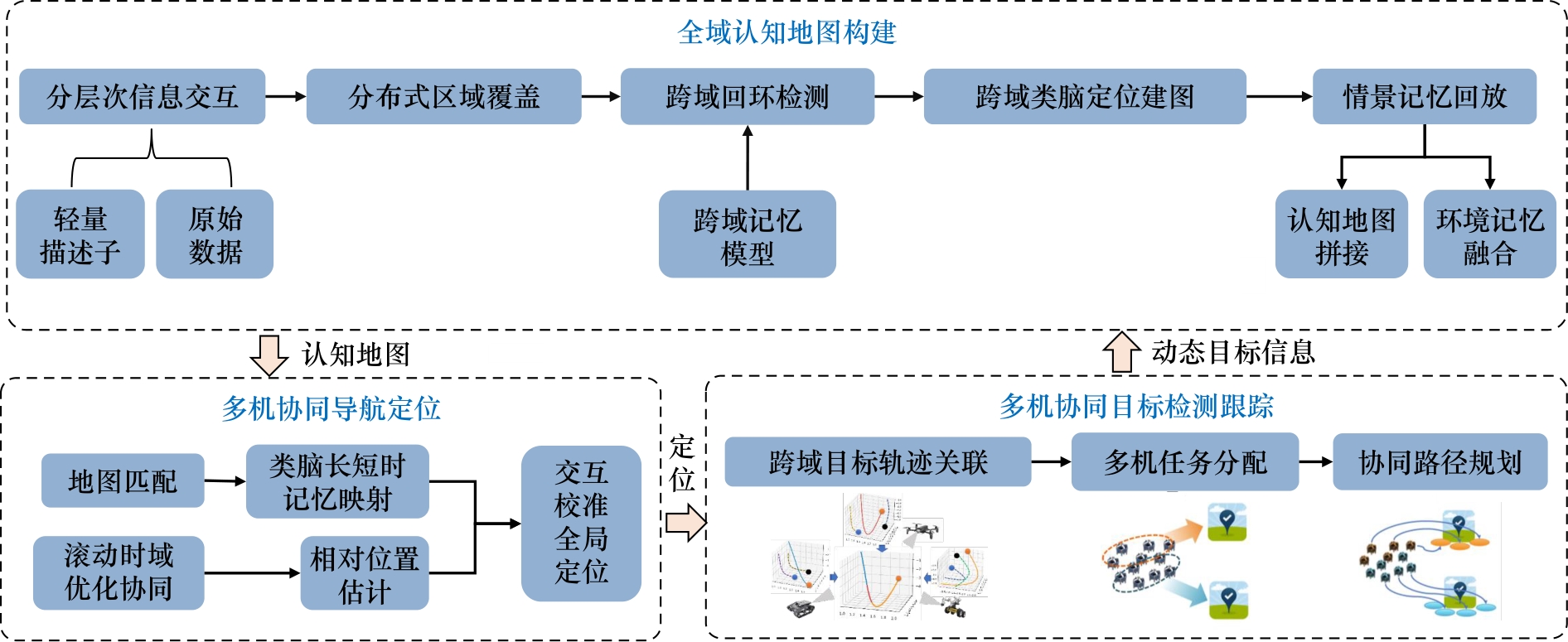
图2
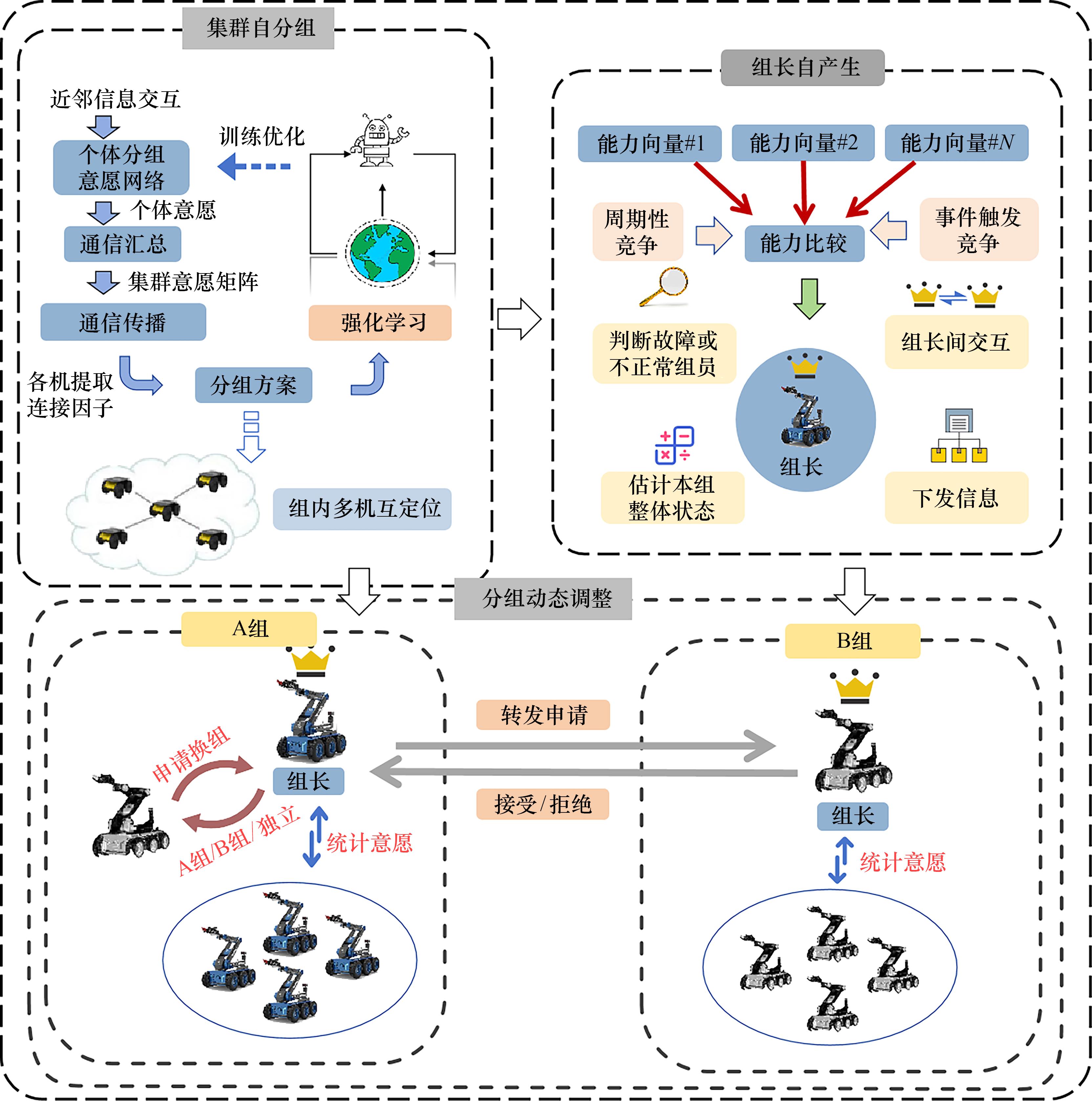
图3

图4

图5
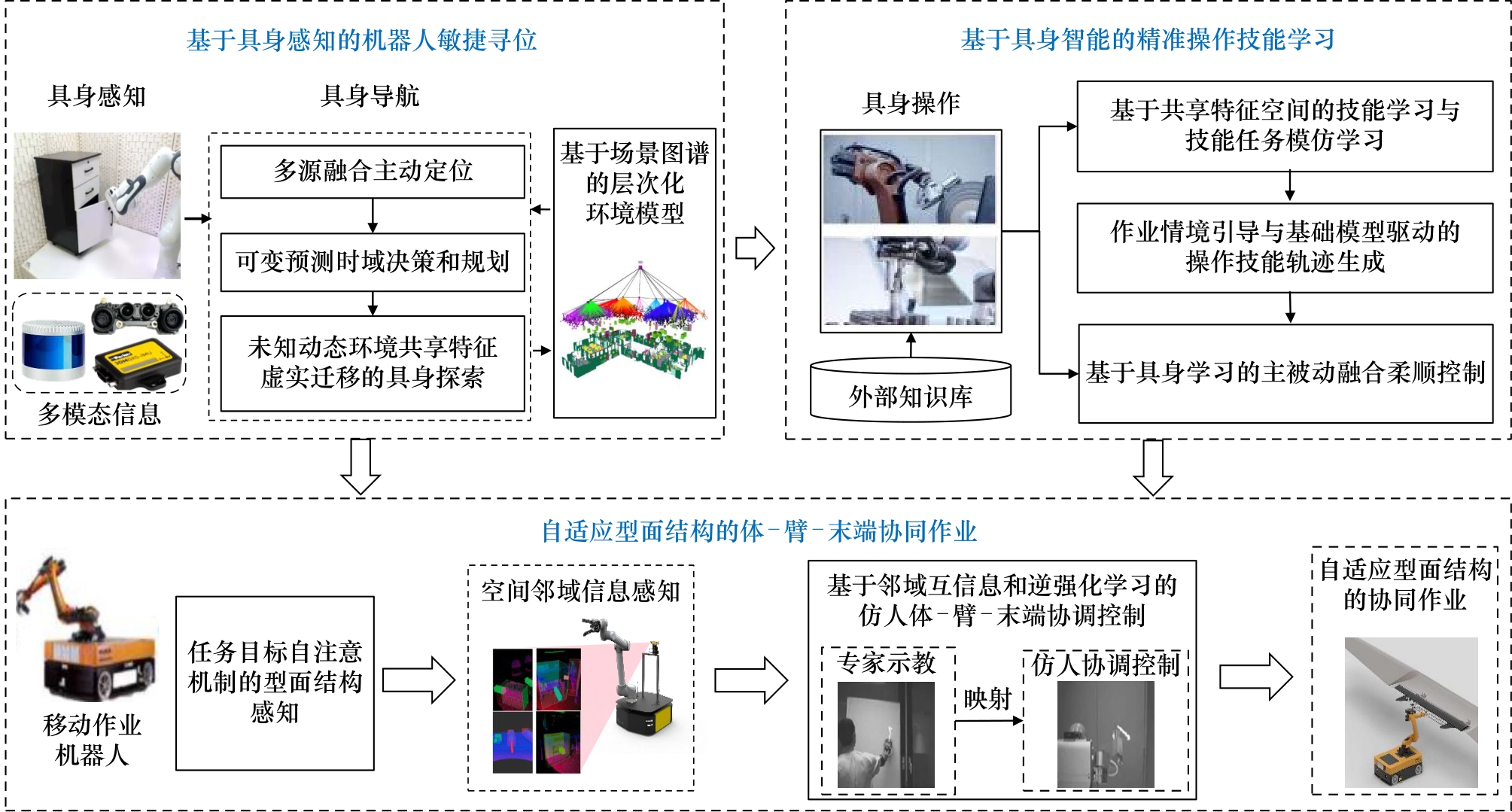
图6

图7
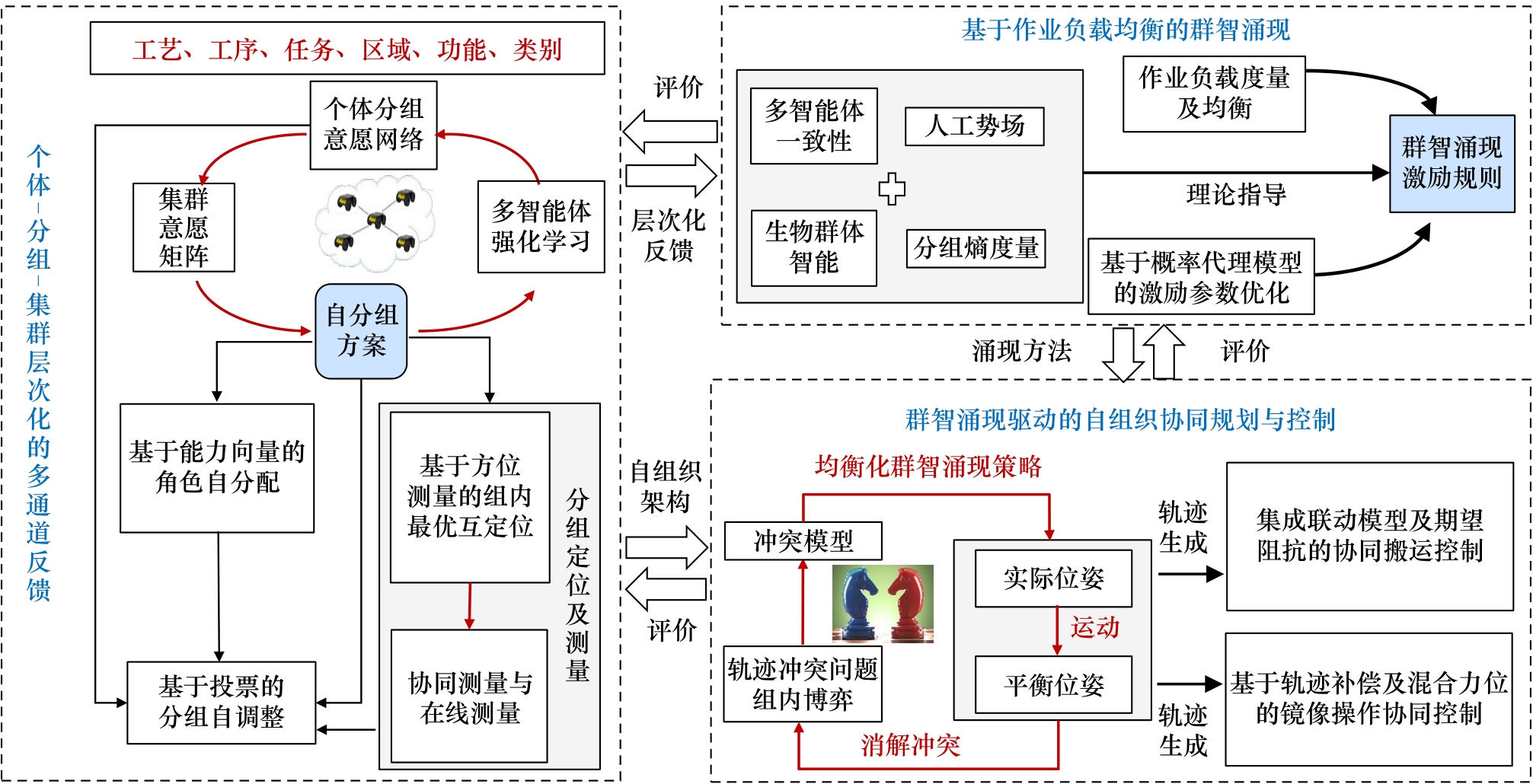
图8
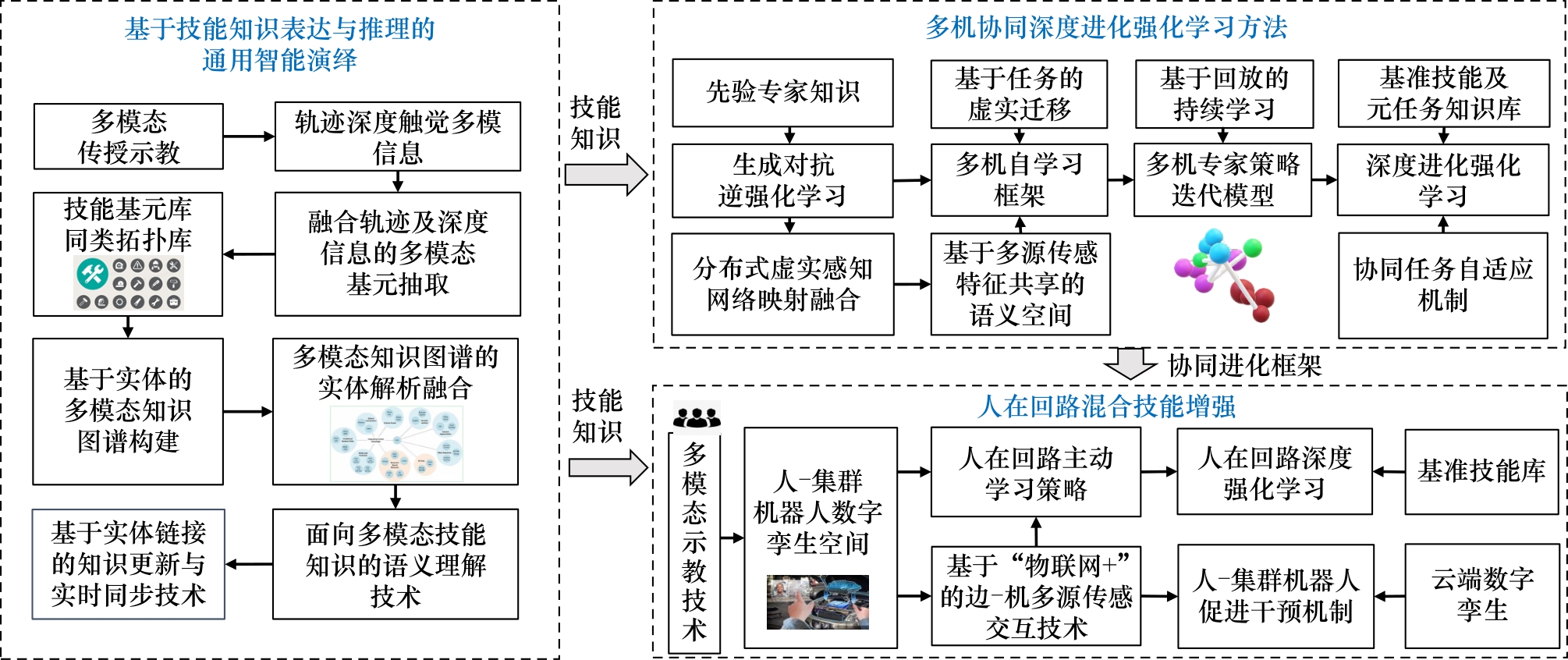
图9
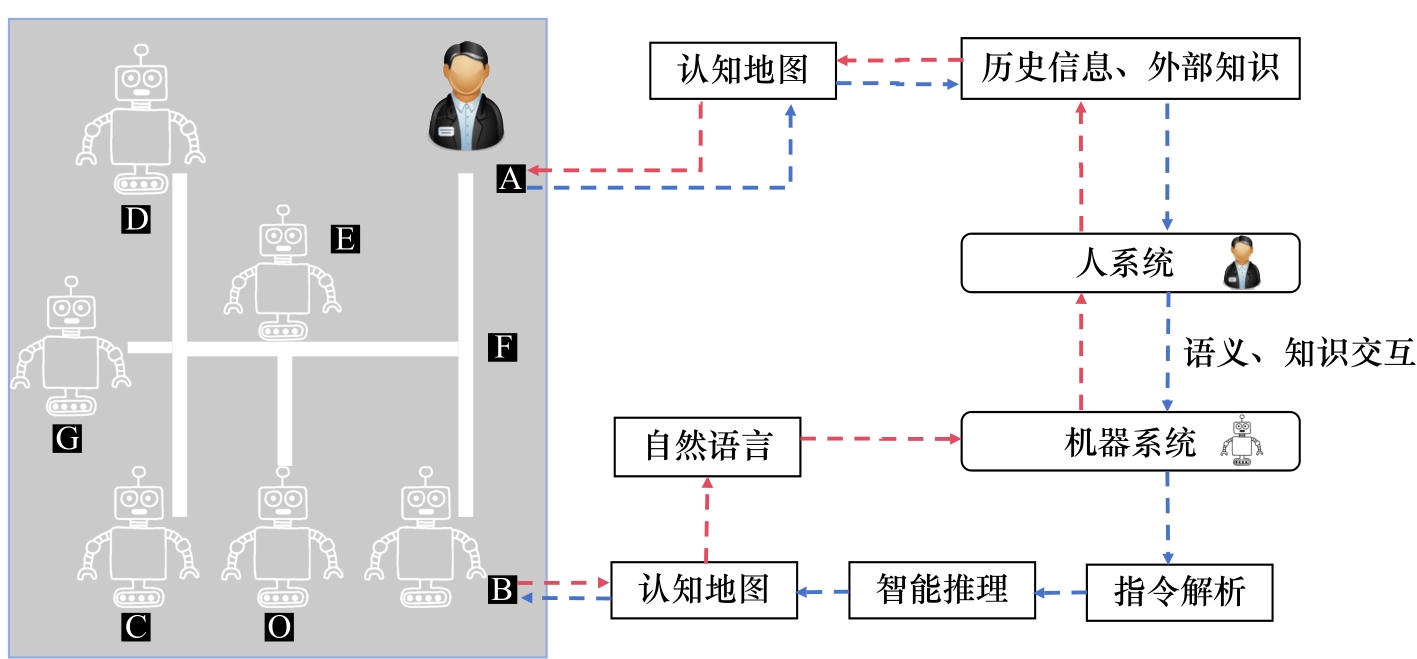
图10
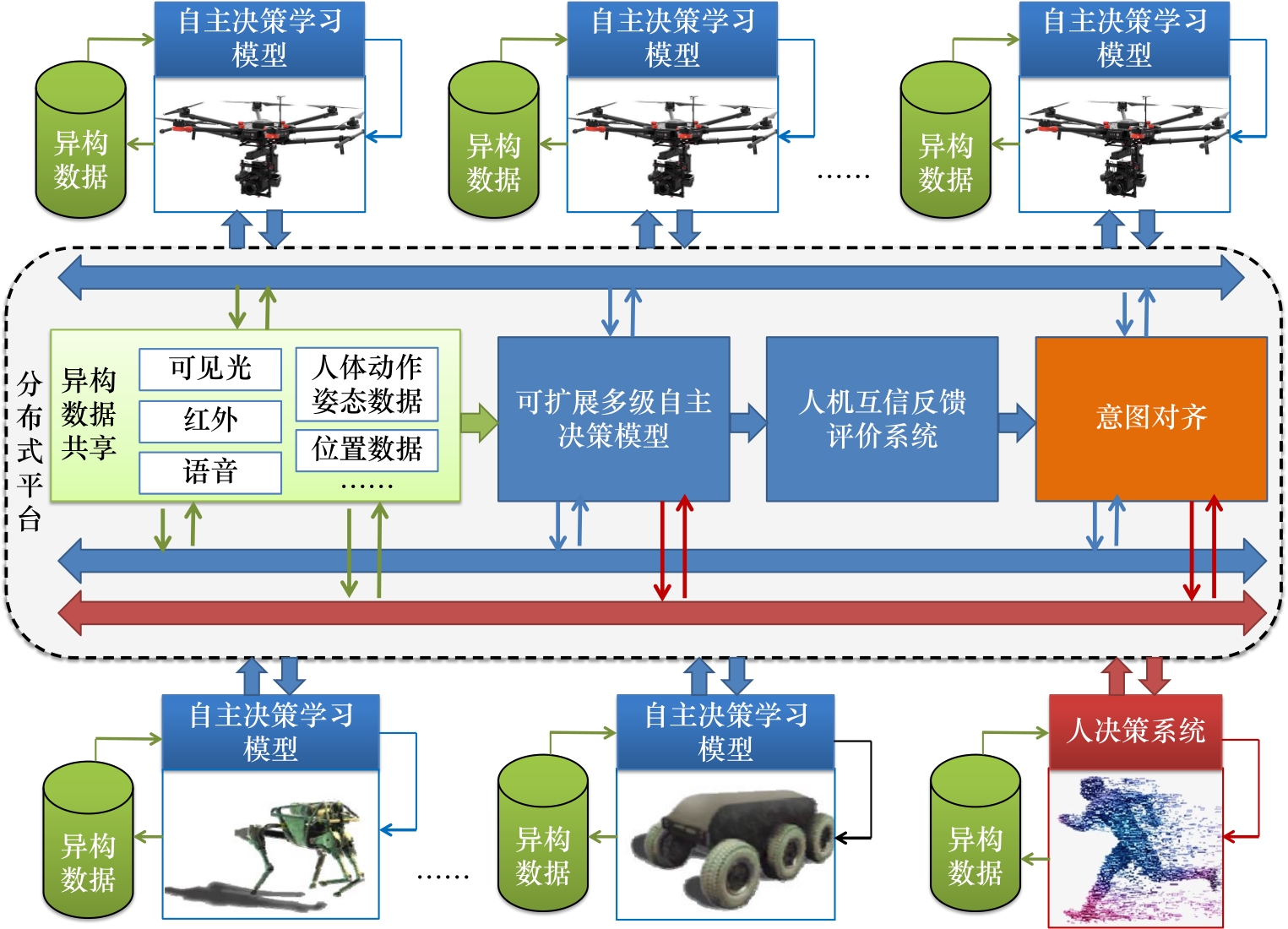
图11
参考文献
[ 1 ]
中国人工智能发展战略研究项目组. 中国人工智能2.0发展战略研究 [M]. 杭州: 浙江大学出版社, 2018.
Chinese Artificial Intelligence Development Strategy Research Project Team. Chinese artificial intelligence 2.0 development war a little research [M]. Hangzhou: Zhejiang University Press, 2018.
[ 2 ] Liu B Y, Wang L J, Liu M, et al. Federated imitation learning: A novel framework for cloud robotic systems with heterogeneous sensor data [J]. IEEE Robotics and Automation Letters, 2020, 5(2): 3509‒3516.
[ 3 ] Zhao S B, Zhang H R, Wang P, et al. Super odometry: IMU-centric LiDAR-visual-inertial estimator for challenging environments [C]. Prague: 2021 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2021.
[ 4 ] Xu J, Li R F, Zhao L J, et al. CamMap: Extrinsic calibration of non-overlapping cameras based on SLAM map alignment [J]. IEEE Robotics and Automation Letters, 2022, 7(4): 11879‒11885.
[ 5 ] Chen S W, Nardari G V, Lee E S, et al. SLOAM: Semantic lidar odometry and mapping for forest inventory [J]. IEEE Robotics and Automation Letters, 2020, 5(2): 612‒619.
[ 6 ] McGuire K N, De Wagter C, Tuyls K, et al. Minimal navigation solution for a swarm of tiny flying robots to explore an unknown environment [J]. Science Robotics, 2019, 4(35): eaaw9710.
[ 7 ] Saboia M, Clark L, Thangavelu V, et al. Achord: Communication-aware multi-robot coordination with intermittent connectivity [J]. IEEE Robotics and Automation Letters, 2022, 7(4): 10184‒10191.
[ 8 ] Talbot B, Dayoub F, Corke P, et al. Robot navigation in unseen spaces using an abstract map [J]. IEEE Transactions on Cognitive and Developmental Systems, 2021, 13(4): 791‒805.
[ 9 ] Zhao D Y, Zhang Z, Lu H, et al. Learning cognitive map representations for navigation by sensory-motor integration [J]. IEEE Transactions on Cybernetics, 2022, 52(1): 508‒521.
[10] Xiao J P, Pisutsin P, Feroskhan M. Collaborative target search with a visual drone swarm: An adaptive curriculum embedded multistage reinforcement learning approach [J]. IEEE Transactions on Neural Networks and Learning Systems, 2023: 1‒15.
[11] Farmani N, Sun L, Pack D J. A scalable multitarget tracking system for cooperative unmanned aerial vehicles [J]. IEEE Transactions on Aerospace and Electronic Systems, 2017, 53(4): 1947‒1961.
[12] Vásárhelyi G, Virágh C, Somorjai G, et al. Optimized flocking of autonomous drones in confined environments [J]. Science Robotics, 2018, 3(20): eaat3536.
[13] Huber L, Slotine J J, Billard A. Avoiding dense and dynamic obstacles in enclosed spaces: Application to moving in crowds [J]. IEEE Transactions on Robotics, 2022, 38(5): 3113‒3132.
[14] Zhou X, Wen X Y, Wang Z P, et al. Swarm of micro flying robots in the wild [J]. Science Robotics, 2022, 7(66): eabm5954.
[15] Notomista G, Mayya S, Hutchinson S, et al. An optimal task allocation strategy for heterogeneous multi-robot systems [C]. Naples: 2019 18th European Control Conference (ECC), 2019.
[16] Jaderberg M, Czarnecki W M, Dunning I, et al. Human-level performance in 3D multiplayer games with population-based reinforcement learning [J]. Science, 2019, 364(6443): 859‒865.
[17]
苗润龙. 分布式无人艇集群协同区域搜索与目标定位研究 [D]. 哈尔滨: 哈尔滨工程大学(博士学位论文), 2021.
Miao R L. Research on swarm of distributed unmanned surface vehicles for collaborative search and targets positioning [D]. Harbin: Harbin Engineering University(Doctoral dissertation), 2021.
[18] Marconi L, Melchiorri C, Beetz M, et al. The SHERPA project: Smart collaboration between humans and ground-aerial robots for improving rescuing activities in alpine environments [C]. College Station: 2012 IEEE International Symposium on Safety, Security, and Rescue Robotics (SSRR), 2012.
[19] Chung T. Offensive swarm-enabled tactics (offset) [R]. Arlington: DARPA Tactical Technology Office, 2017.
[20] Ackerman E. A robot for the worst job in the warehouse: Boston Dynamics´ Stretch can move 800 heavy boxes per hour [J]. IEEE Spectrum, 2022, 59(1): 50‒51.
[21] Cao C, Zhu H, Ren Z, et al. Representation granularity enables time-efficient autonomous exploration in large, complex worlds [J]. Science Robotics, 2023, 8(80): eadf0970.
[22] Qiao Y Y, Qi Y K, Yu Z, et al. March in chat: Interactive prompting for remote embodied referring expression [C]. Paris: 2023 IEEE/CVF International Conference on Computer Vision (ICCV), 2023.
[23] Mokaram S, Aitken J M, Martinez-Hernandez U, et al. A ROS-integrated API for the KUKA LBR iiwa collaborative robot [J]. IFAC-PapersOnLine, 2017, 50(1): 15859‒15864.
[24] Srinivasa S S, Berenson D, Cakmak M, et al. Herb 2.0: Lessons learned from developing a mobile manipulator for the home [J]. Proceedings of the IEEE, 2012, 100(8): 2410‒2428.
[25] Apolinarska A A, Pacher M, Li H, et al. Robotic assembly of timber joints using reinforcement learning [J]. Automation in Construction, 2021, 125: 103569.
[26] Aguinaldo A, Bunker J, Pollard B, et al. RoboCat: A category theoretic framework for robotic interoperability using goal-oriented programming [J]. IEEE Transactions on Automation Science and Engineering, 2022, 19(3): 2637‒2645.
[27] Abadi M, Agarwal A, Barham P, et al. TensorFlow: Large-scale machine learning on heterogeneous distributed systems [EB/OL]. (2016-03-14)[2023-11-15].https://www.semanticscholar.org/paper/TensorFlow: -Large-Scale-Machine-Learning-on-Systems-Abadi-Agarwal/9c9d7247f8c51ec5a02b0d911d1d7b9e8160495d.
[28] Paszke A, Gross S, Massa F, et al. PyTorch: An imperative style, high-performance deep learning library [C].Vancouver: The 33rd Conference on Neural Information Processing Systems, 2019.
[29] Bi R, Xu T T, Xu M X, et al. PaddlePaddle: A production-oriented deep learning platform facilitating the competency of enterprises [C]. Hainan: 2022 IEEE 24th International Conference on High Performance Computing and Communications, 2022.
[30] Integration B O H S. Human-AI teaming: State-of-the-art and research needs [M]. Washington, DC: National Academies Press, 2022.











 京公网安备 11010502051620号
京公网安备 11010502051620号




