

《1. 引言》
1. 引言
滚珠丝杠进给驱动系统表现出高阶动态特性,其动态值随滑架的位置不同而变化[1]。除了这些在运动和振动控制上产生的变化的高阶动力之外,进给驱动的另一个明显特征是:采用直线光栅尺进行直接位置测量时的非同位控制难以使高速机床达到更高的运动精度水平。
当致动器和传感器(在用于控制的兴趣点处)未被放置在单个点或坐标上时,存在非同位的情况,因为涉及干预动态,这使得控制问题复杂化。非同位控制与异相模式[4]、非最小相位(NMP)系统[5]以及带有右半平面(RHP)零点的传递函数[2]等问题密切相关。这些在运动和振动控制领域内都是公认的经典难题。而难题的根源来自中间结构的弱动态和有限的波传播速度。学者已经提出了各种方法来解决这个问题。典型的方法包括模态控制[6,7]、内部模型控制[8]、延迟反馈控制[9]、零相位误差跟踪控制(ZPETC)[10]和现代控制方法,如线性二次型调节器(LQR)和线性二次高斯(LQG)方法。众所周知的是,非同位系统比同位系统更有优势,如高度的可观测性和可控性、更好的高频滚降,还有易于消除的高频控制溢出[4]。
考虑到滚珠丝杠主轴的灵活性和振动,我们在进给驱动控制方面进行了大量的研究,并已经在滚珠丝杠进给驱动的高速控制方面取得了成功的应用[12,13]。其中一些工作研究了工作台位置和载荷质量变化对性能的影响[14,15],为处理不同情况的动态变化,人们提出了不同的方法,包括经典的自适应控制[6,16]、鲁棒控制[17]和智能控制[18]。尽管滚珠丝杠进给驱动是典型的非同位系统,并且有许多成功的理论和结果[3,19]已被验证,可直接用于对非同位系统的研究,但从非同位系统的角度对进给驱动进行的研究还很少。
本文在简要描述了一般非同位系统的性质之后,从非同位系统的角度研究了滚珠丝杠进给驱动,然后开发了一种由模态特征调节器(MCM)和智能自适应调整算法(ATA)组成的控制策略,并将其应用于具有不同高阶动态的滚珠丝杠进给驱动系统,其中,我们用一种基于频率的动态子结构方法建立了驱动系统的模型。最后,对该策略的有效性和鲁棒性进行了数值验证。
本文报道的研究是作者在文献[1]中提出的工作的延伸。本文提出的控制策略,特别是使用峰值滤波器和陷波滤波器的组合,是受到参考文献[6]的启发。
《2. 滚珠丝杠进给系统中的非同位系统控制》
2. 滚珠丝杠进给系统中的非同位系统控制
如图1所示的三物块双弹簧(3M2S)系统是一个简单的例子,用来说明非同位系统的性质,以及运动和振动控制的相关难点。在同位的情况下,致动器(可以施加力或转矩)和传感器(产生反馈信号)被放置在单个点处,如F1 -x1 这一对(系统h11 )。在非同位的情况下,致动器和传感器被放置在不同的坐标处,如F1 -x2 (系统h21 )或F1 -x3 (系统h31 )。
《图1》
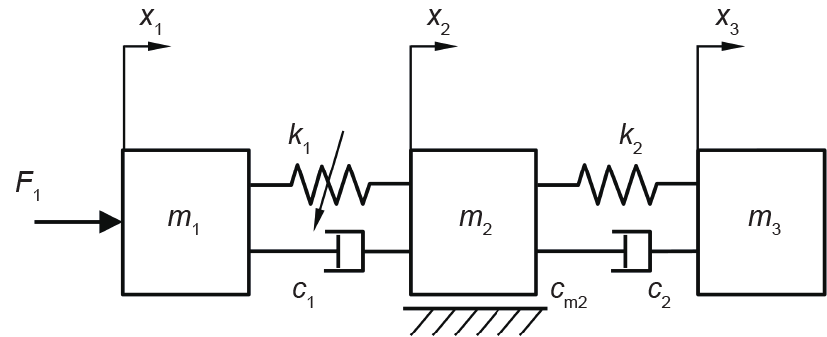
图1. 3M2S系统的方案。m1 ,m2 ,m3 是三个物块的质量;k1 和k2 是两个弹簧的弹簧系数;c1 ,c2 和c m2 是阻尼;x1 ,x2 和x3 是位移;F1 是施加在m1 上的力。
图2给出了3M2S系统的频率响应函数(FRF),图3给出了3M2S系统在工作状态下的刚体运动和两种共振模式的工作振型。所使用的参数值分别为:m1 =100 kg,m2 = 150 kg,m3 = 50 kg,k1 = 5 × 107 N·m−1 ,k2 = 2 ×107 N·m−1 ,c1 = 1 × 103 N·s·m−1 ,c2 = 4 × 102 N·s·m−1 ,c m2 = 0。从图中可以看到,对于同位情况(h11 ),滞后相位总是在0°~180°之间;对于非同位情况(h21 ,h31 ),滞后相位要大得多,而在较高的频带上,幅度会急剧下降。在经典控制理论中被归类为最小相位系统的h11 系统是易于控制的。而非最小相位系统h21 和h31 系统难以控制,容易出现不稳定性,且对不确定性十分敏感。
《图2》
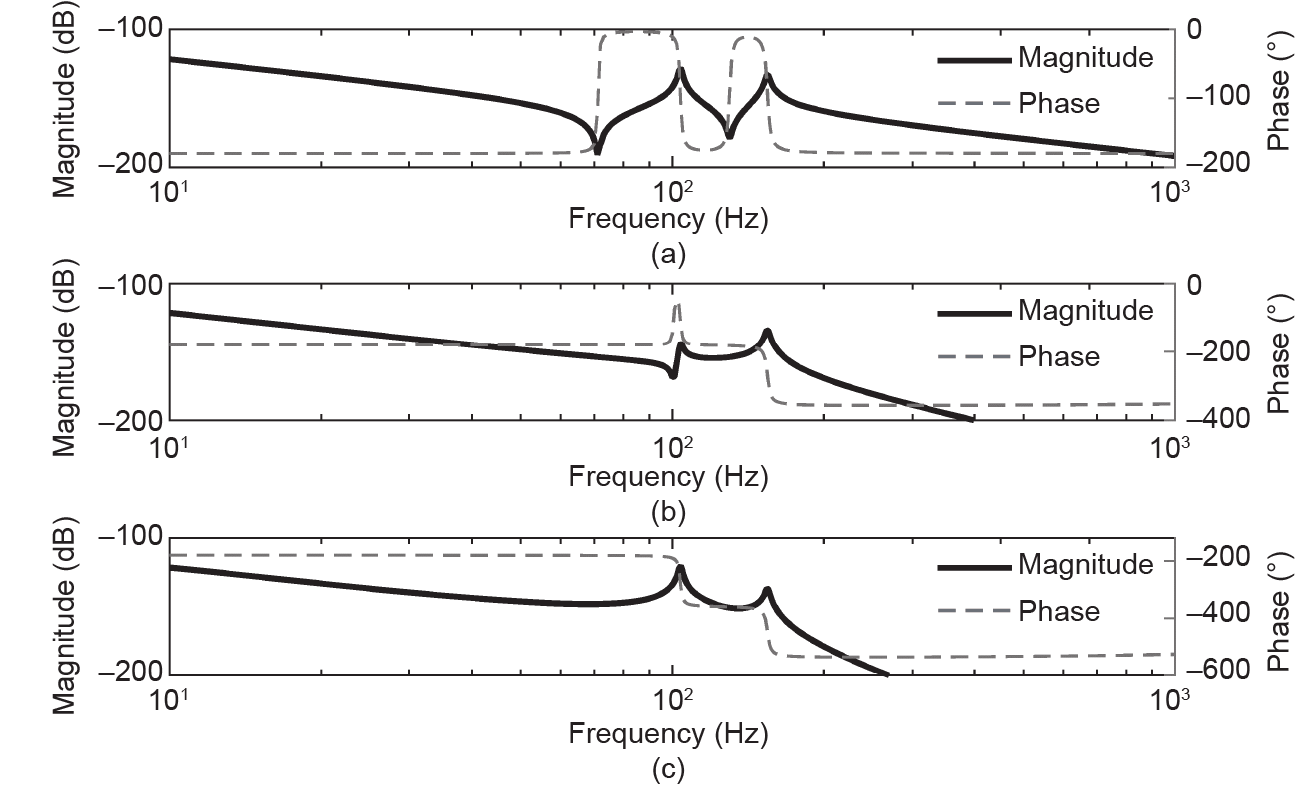
图2. 3M2S系统的频率响应函数。(a)h11 ;(b)h21 ;(c)h31
根据图3中的偏转形状,可以观察到致动器(坐标1)的坐标与刚体运动的偏转和两个共振模式之间具有同相关系。这是一个理想的特性,它使用一个简单的反馈控制器,如具有被动机械等效的比例微分(PD)控制(图4),就可以确保其稳定性。但是,非同位下的坐标没有这个理想的特性。它们的偏转形状可以与刚体运动不同步,这会对控制器施加冲突控制。例如,对于非同位坐标对F1 -x3 ,应该将负反馈用于刚性运动控制和二阶共振模式(155 Hz)的振动控制,而正反馈必须用于第一共振模式(104 Hz)。因此像比例积分微分(PID)控制之类的简单控制方法已经无法解决这个冲突。
《图3》
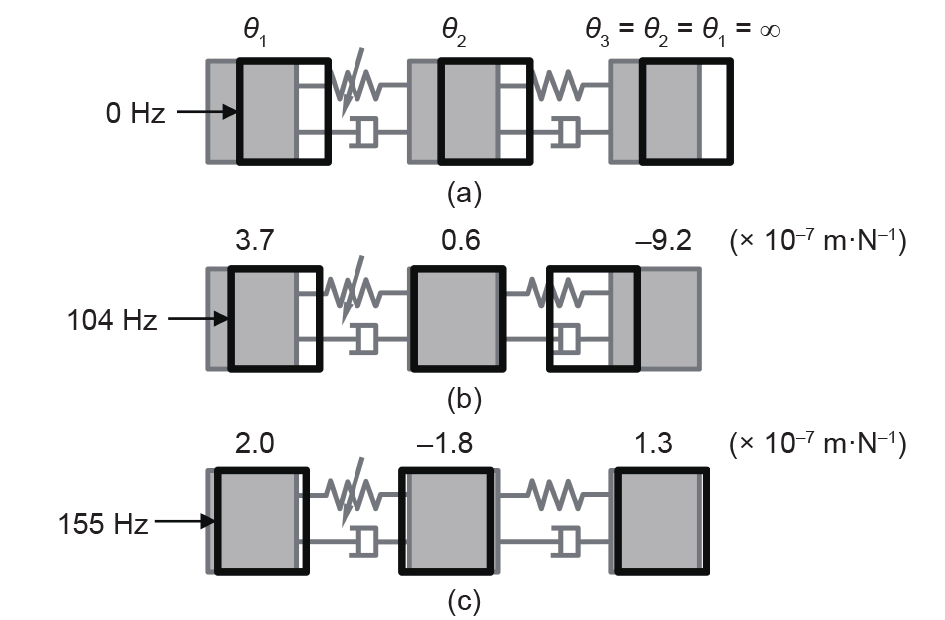
图3. 刚体运动(a)和两种共振模式(b,c)的工作振型。θ1 ,θ2 和θ3是三个坐标的响应。
《图4》
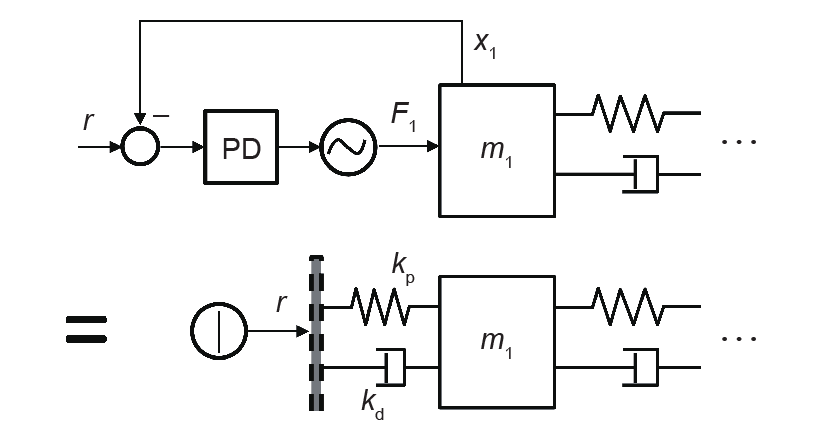
图4. PD同位控制及其被动机械等效。kp :比例增益;kd :微分增益;r:给定位移。
奈奎斯特图提供了另一种理解非同位系统性质的方法(图5),图5还被用于开发非同位系统的控制器。在奈奎斯特图中,同位系统有表示共振模式并位于一侧的圆,而非同位系统具有位于相反侧的圆。奈奎斯特图因此暗示了一种控制技术,该技术涉及通过相位调整而将非同位系统修正为虚拟同位的系统。需要注意,上面隐式使用了以下假设:模式是成比例阻尼的;模态函数是实值的;没有控制延迟或测量延迟。如果要考虑非比例阻尼或时间延迟,如实际进给驱动中出现的那些,那么简单的相位内或相位外的关系将不再存在,而非同位的控制问题将变得更加复杂和困难。
《图5》
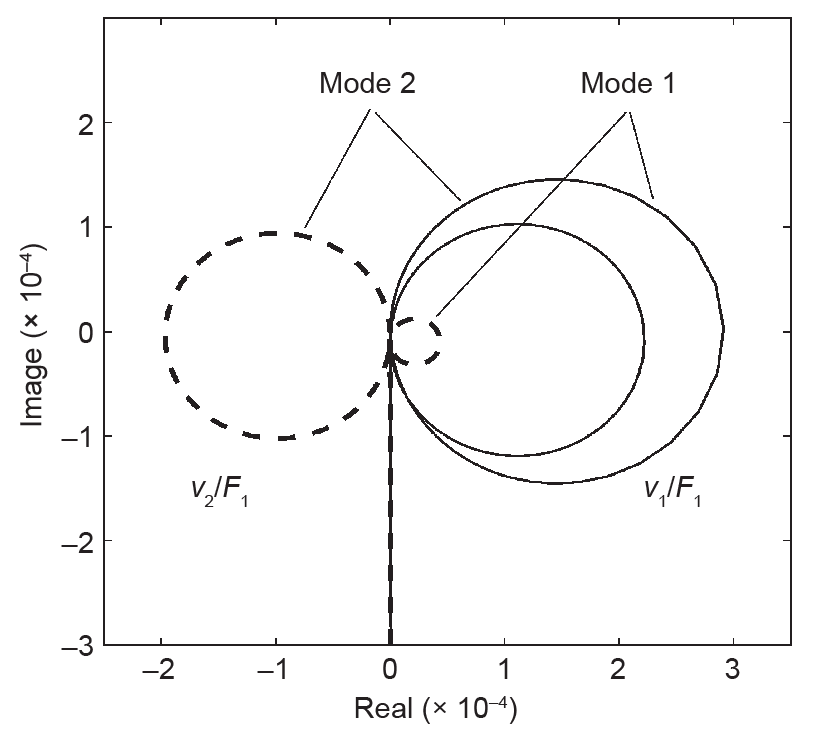
图5. 3M2S的同位和非同位情况下的奈奎斯特图。V1 / F1 和V2 / F1 是速度响应。
图6显示了滚珠丝杠进给驱动系统的结构。螺母连接滚珠丝杠和滑架,并将滚珠丝杠的转动转换成滑架的轴向运动。电动机通过联轴器与滚珠丝杠连接。T1 ,θ1和ω1 分别是对转子施加的转矩、转动位移和电动机转子(坐标1)的速度;y2 和v2 分别是滑动部件(坐标2)的轴向位移和速度。只有当电动机端的编码器用于反馈控制时,系统是同位的,并且可以很容易地通过一个高增益的简单控制器进行控制。但是,通常在靠近工作点(坐标3)的滑动部件底部附加线性标尺以用于位置反馈,来消除传动间隙、柔性偏转以及热量和节距的负面影响。传感器和致动器是非同位的,并且中间结构(即传动系统)具有有限动态。因此,系统会变成一个难以控制的非同位系统。除上述典型特征外,滚珠丝杠进给驱动的非同位控制还具有一些显著特点,其中包括:①中间结构的变化动态;②限制控制和测量周期造成的时间延迟;③传感器坐标(坐标2)与最终兴趣点的坐标(坐标3)是不同的,其原因在于坐标之间的干预动态不可忽视。
《图6》
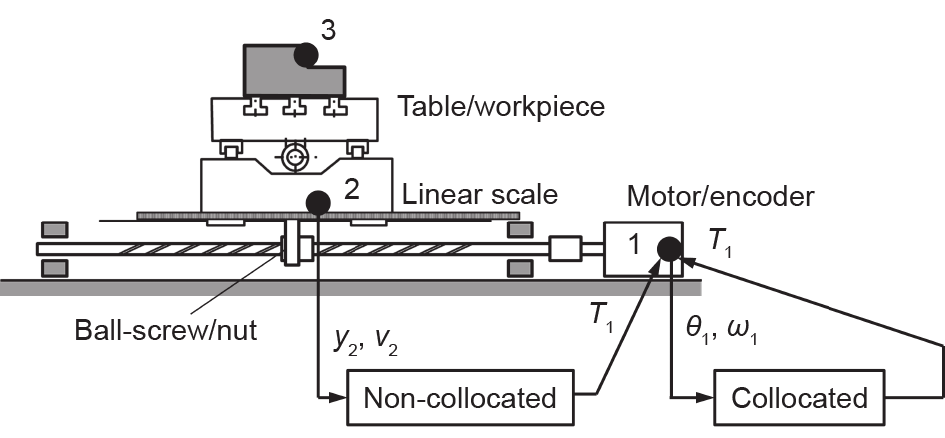
图6. 滚珠丝杠进给驱动系统中的同位和非同位控制。
图7介绍了在考虑滚珠丝杠进给驱动的非同位控制特点下的一般模型。在该模型中,机械动态是由hij 组成的二进三出的频率响应函数(FRF)矩阵。电动机被简化为增益ki kT ,即电流放大和转矩常数的乘积;控制延迟被简化为时滞τ;符号u,F1 和F3 (Fd )分别是指令加速度、伺服力和干扰力。该模型用于进一步的控制器开发和集成仿真,并由二进三出FRF的机械动态、时间延迟效应和包含伺服电动机及其驱动系统的简化模型所组成。
《图7》
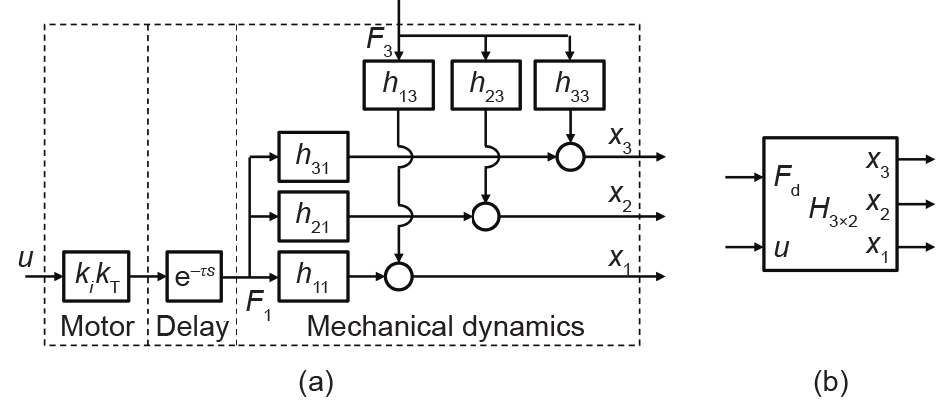
图7. (a)考虑非同位情况的一般模型和(b)符号表示。
《3. 设备的变化高阶动态模型》
3. 设备的变化高阶动态模型
本节简要介绍作者在参考文献[1]中提出的多子系统耦合方法和相应的滚珠丝杠进给驱动建模方法,其次介绍基于所获得的FRF模型的动态变化进行分析说明。
《3.1. 动态建模》
3.1. 动态建模
考虑到其转动和轴向的灵活性,我们认为滚珠丝杠是一个分布参数系统。其余元件(包括轴承联轴器电机转子和滑动部件)被假定为集总参数。在动态子结构方法中,滚珠丝杠进给驱动系统分为三个子系统,如图8所示,子系统A由组件的转动和振动组成,而组件包括滚珠丝杠、联轴器和带有旋转支撑的电动机转子;子系统B由带有轴向支撑的滚珠丝杆的轴向运动和振动组成;子系统C由滑动部件的轴向运动和振动组成,这由滑架的轴向和俯仰运动所引起。
《图8》
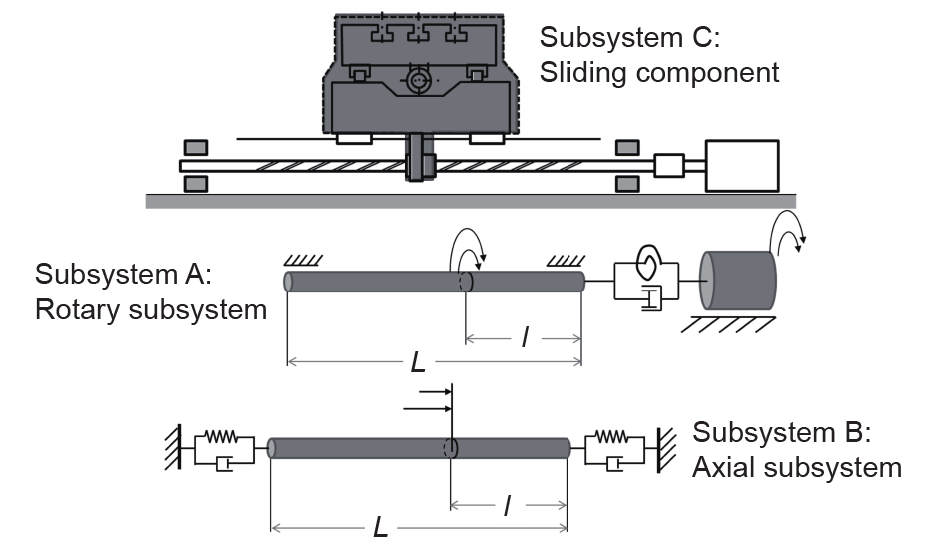
图8. 滚珠丝杠进给驱动系统的三个子系统。
图9显示了所提出的三个子系统响应耦合的示意模型,该耦合是通过滚珠丝杠进给驱动系统的螺母。这个模型被用于连接(如组装)上面提到的三个子系统。式(1)是根据图9所示的子系统连接配置,即通过螺母连接三个子系统以获得耦合系统的响应耦合方程:
《图9》
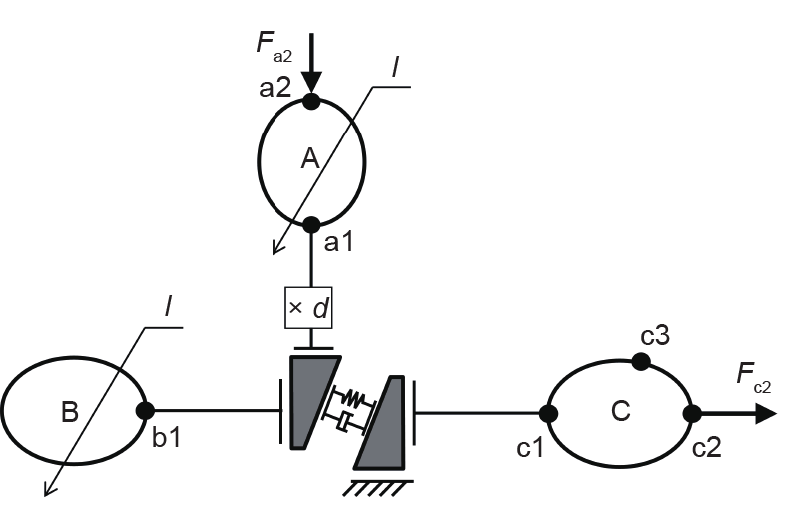
图9. 经螺母连接的三个子系统响应耦合的示意模型。“×d”表示滚珠丝杠直径的倍增。
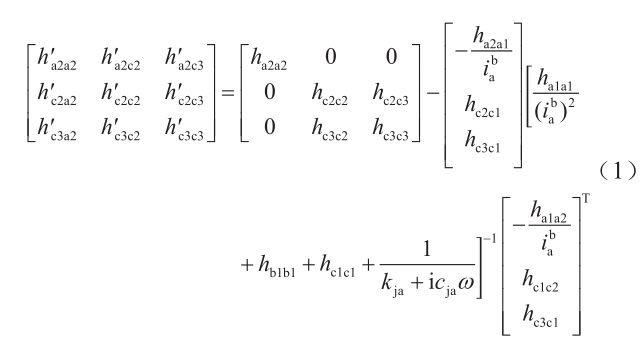
式中,i和ω分别为虚数单位和角频率;ha1a1 , hb1b1 , hc1c2 , ...为子系统的前置耦合FRF;h′a2a2 , h′a2c2 , ...为连接系统的后置耦合FRF;iba 为从子系统A的界面坐标到子系统B的界面坐标的传动比;kja 和cja 分别为螺母和螺母接合面的等效轴向刚度和阻尼。
在滚珠丝杠的转动子系统和轴向子系统建模中,采用了牛顿-欧拉方程和传统的双坐标方程。滑动子系统应用了多刚体动力学模型、拉普拉斯变换和复数矩阵求逆等方式。式(1)是用来连接三个子系统的。所提出的建模方法的最后一步如下:

式中,isc 为滚珠丝杠的传动比;kja 和cja 分别为螺母的轴向刚度和阻尼;Ytable 为数控(NC)单元上显示的表的Y位置,其中,螺母位置l = Ytable + l0 ;下标M指组装的机械系统,下标R,A和S分别为转动子系统、轴向子系统和滑动子系统;下标1,2和3分别指图6中所示的坐标1,2和3;下标n和l分别为滑架在螺母位置处的坐标和滚珠丝杠在螺母位置处的坐标;下标m为电动机转子的坐标。
《3.2. 动态变化分析》
3.2. 动态变化分析
我们所提出的建模方法具有很高的计算效率,可用于与位置相关的动态变化分析。直接使用建模方法可以预测FRF的变化。图10示出了幅度图系的变化动态,图11示出了云图中的变化动态。从预测的数据可以看出,对于不同的工作台位置,一些频率和幅度几乎是恒定的,而一些共振频率和幅度呈现显著的规律变化。从云图中还可以确定,较高频率的共振模式比较低频率模式显示出更大的变化。
《图10》
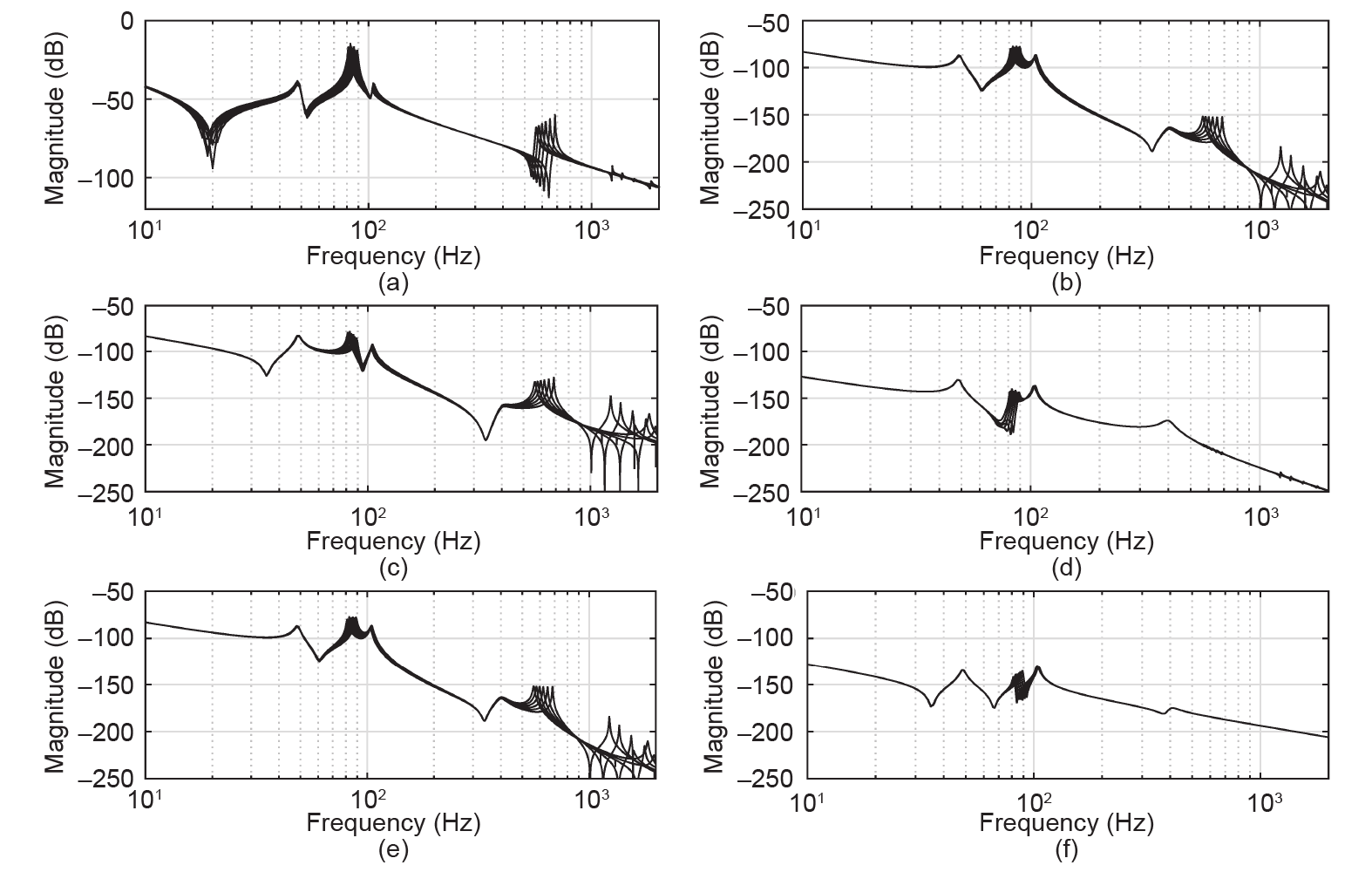
图10. 幅度图系的动态变化(Ytable = 100~700 mm)。(a)T1 in和θ1 out;(b)F3 in和θ1 out;(c)T1 in和x2 out;(d)F3 in和x2 out;(e)T1 in和x3 out;(f)F3 in和x3 out。
《图11》

图11. 变化动态h21 的云图显示(Ytable = 100~700 mm)。
我们可以从FRF中提取模态特性,并用于分析滚珠丝杠进给驱动系统与位置相关的动态。对于理解不同变化模式的基本性质以及在考虑其动态变化的同时优化结构,模态具有特别重要的意义。相关研究往往忽略相位变化。然而,超前/滞后补偿和峰值滤波器控制的成功取决于共振相位及其变化。图12显示了一些模态的共振相位变化。类似于频率和量值,对于不同的工作台位置,一些相位图几乎是恒定的,而另一些表现出显著的变化,并且较高频率的共振表现出比低频率共振大得多的相位变化。相位值及其变化模式表明实际进给驱动系统的复杂模态,其坐标不具有简单的同相或异相关系[20,21]。使用模态控制时,这一点非常重要。
《图12》
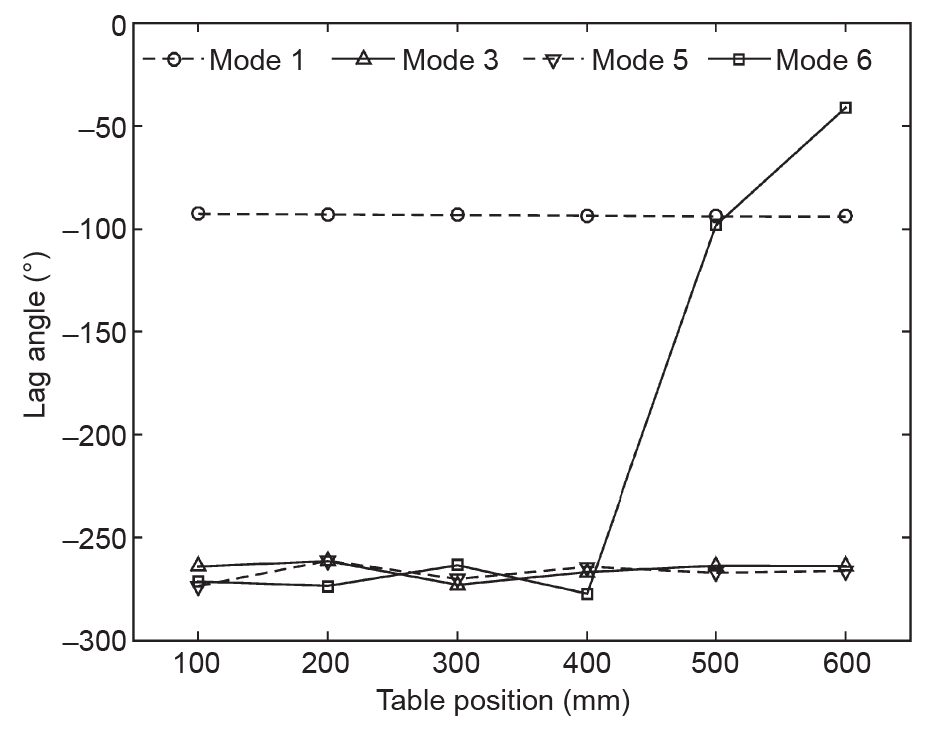
图12. 对应工作台位置(h21 )的共振相位变化。
《4. 智能非同位控制策略》
4. 智能非同位控制策略
本节提出了一种用于滚珠丝杠进给驱动系统的智能非配置控制策略。图13提供了策略的控制框架。策略的主要特点如下:
《图13》
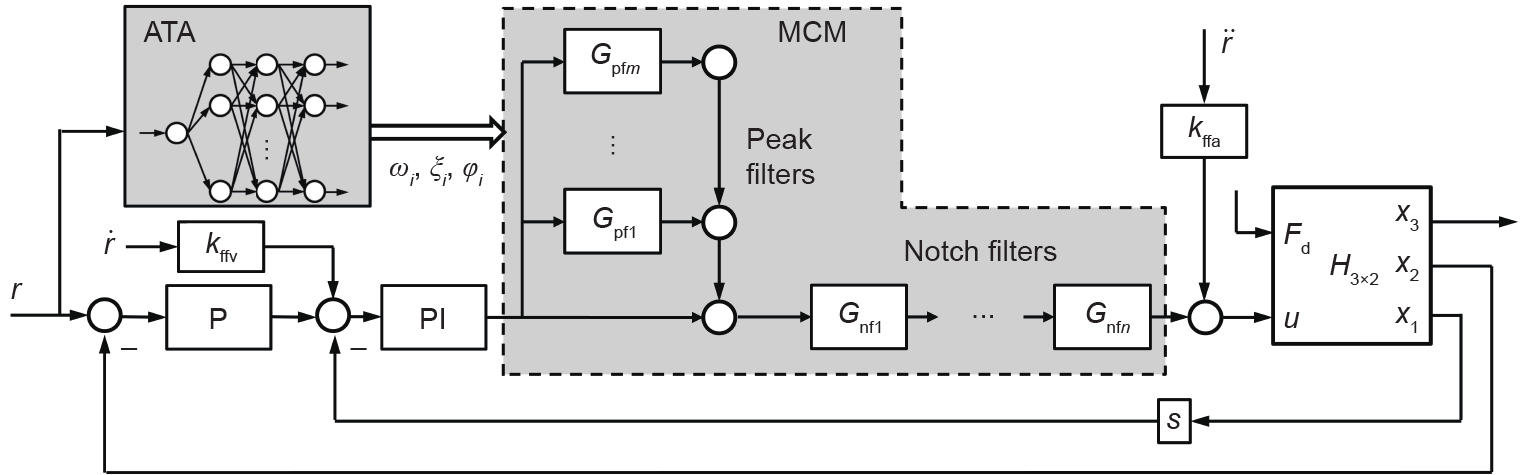
图13. 智能非同位控制策略。P:比例;PI:比例积分。
采用嵌套双环控制框架。内部循环是一个同位的速度控制回路,而外部是一个非同位的位置控制回路。微分算子用于从位移测量产生速度反馈。内部回路用于提供控制阻尼并修改设备特性;使用直接反馈的外部环路被用于实现高位置精度。双回路控制也具有易于实现速度前馈和加速前馈控制的优点,即kffv 和kffa 。
在内环上增加一个MCM,即峰值滤波器(Gpf1 ,...,Gpfm )和陷波滤波器(Gnf1 ,...,Gnfn )的组合。这主要是为了纠正非同位系统对外部环路的负面影响,消除高频溢出的影响。
ATA旨在调整MCM的参数;根据输入位置生成平滑的插值参数,输入位置数据来自多个微调的本地控制器。
《4.1. 模态特征修正》
4.1. 模态特征修正
MCM是峰值滤波器和陷波滤波器的组合,峰值滤波器用于将低中频模式修正为同相或几乎同相的情况,这有助于提高速度控制环路的控制增益,并消除了非同位控制对位置控制回路的负面影响。陷波滤波器用于取消较高频率模式,以避免控制溢出。使用滤波器组合,而不是单独使用陷波滤波器,具有降低对不确定性的灵敏度和提高针对切削力的抗振性的优点。MCM的峰值滤波器部分(Gpf )由公式(3)给出[19]:

式中,s为拉普拉斯变量;m为所用峰值滤波器的数量;ωi 为共振频率;ξi 为阻尼比;φi 为移相位;Ki 为增益。
每个峰值滤波器都有四个参数可以调整,用以修改目标模式。从实际角度来看,式(3)对机械模式执行了两个修正:幅度调整和相移。图14表明了在具有不同特性的目标模式中这些因素所产生的影响。结果表明,修正后的模式具有较高的开环增益和显著增加的稳定性,这对达到较高的运动控制性能和振动控制性能来说,至关重要。
《图14》
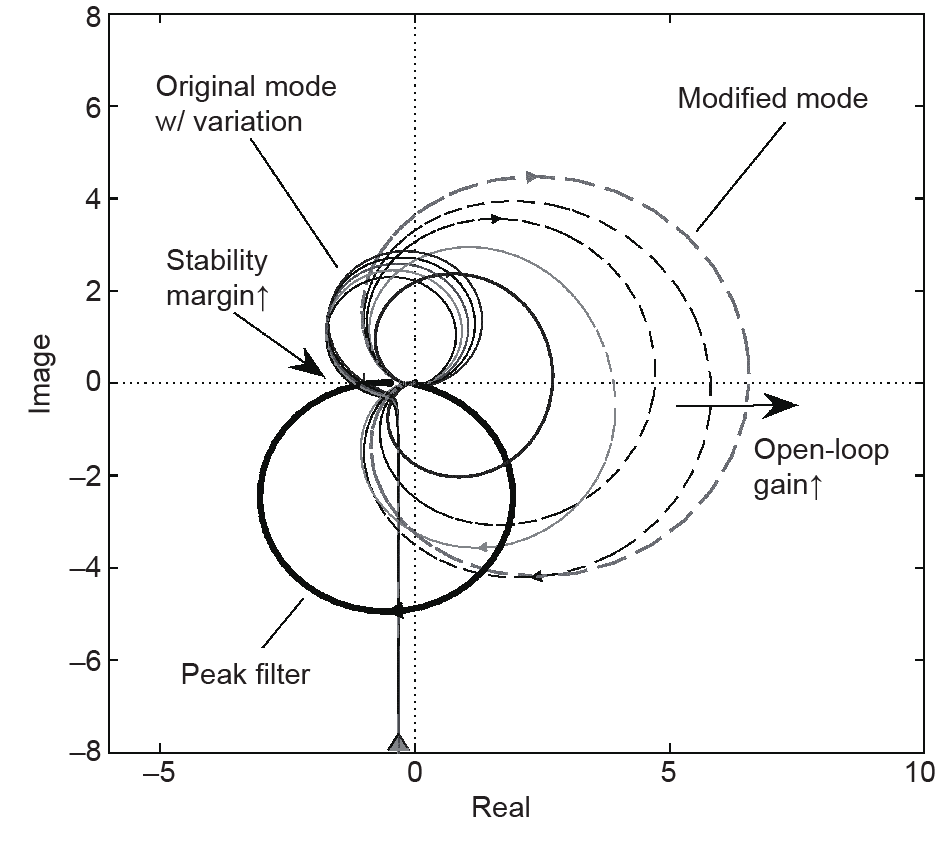
图14. 峰值滤波器的修正效果,其中,w / variation是指发生变化。
常见的二阶陷波滤波器(Gnf )被用在MCM中,如方程(4)所示[6]:

式中,n为所用陷波滤波器的数量;ωj 为缺口频率;ξnj和ξdj 为阻尼比。
《4.2.智能自适应调整法》
4.2.智能自适应调整法
我们已经了解到的是,陷波滤波器对陷波频率非常敏感。如果陷波频率与实际的共振频率不同,则闭环系统可能会出现振荡增大甚至不稳定的情况。所提出的峰值滤波器[方程(3)]对于频率差是不敏感的,但对实际共振相是敏感的。考虑到滚珠丝杠进给驱动系统的模态特性具有显著的位置依赖性变化,在此建议使用ATA。ATA的先决条件包括:①固定工作台位置的设备具有准确模态特性,这是根据验证模型或实验分析预测得到的;②使用数值优化或手动调整方法,设计合理且可以微调的本地控制器。
选定人工神经网络(ANN)来实现ATA;根据输入位置值生成平滑的插值参数,位置值由几个微调的本地控制器的数据产生。图15显示了基于ANN所提出的ATA的结构,具有三层:第一层和第二层是隐藏层,第三层是输出层。网络的输入是工作台的位置;输出是MCM中适用于工作台位置的滤波器的参数。S型传递函数和线性函数分别用于隐藏层和输出层的节点。反向传播(BP)算法用于训练网络。
《图15》
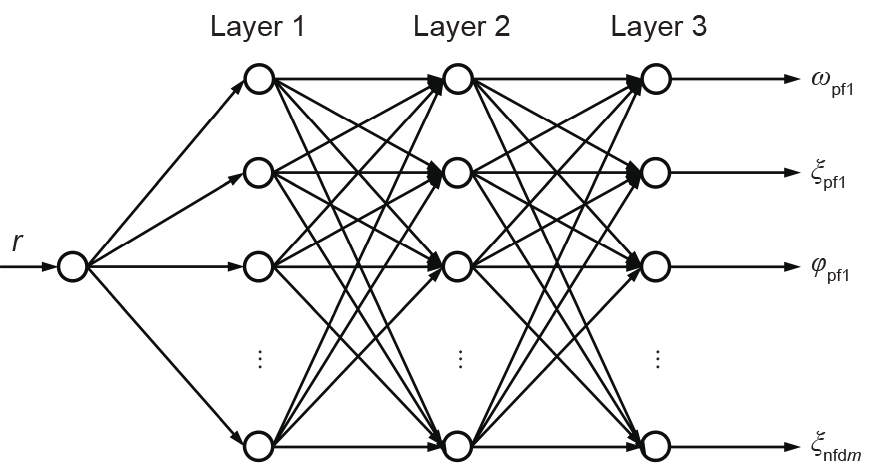
图15. 基于ANN所提出的ATA结构。
《5. 数值模拟和验证》
5. 数值模拟和验证
我们所提出的控制策略被应用于一个实际的滚珠丝杠进给驱动系统,该驱动系统涉及与位置相关的动态,这在参考文献[1]中已经建模和验证。表1给出了由FRF动态模型确定的模态特性,利用奈奎斯特图,根据它们对稳定裕度的影响选择模式。所以模式3作为峰值滤波器的目标模式,而模式5作为陷波滤波器(n = m =1)的目标模式。总而言之,MCM被设计为用来校正模式3的相位并消除模式5的共振。六个固定的本地控制器采用手动调整,将运动控制性能最大化,并被用来训练ANN。在这种情况下,带有单进七出ANN的ATA主要用于调整滤波器的参数,以适应模式3的实际相位和模式5的实际频率的变化。
《表1》
表1 测试设备的模态特性(Ytable = 115 mm)
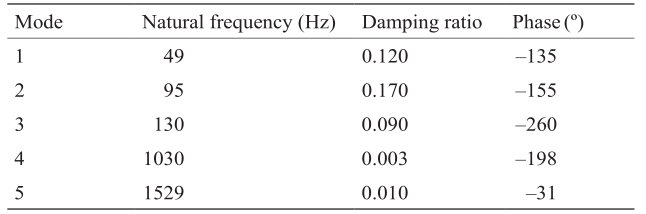
图16和图17给出了分别在传统PID控制和所提出的控制下,短程往复运动的跟踪响应和误差的仿真结果。发现在我们提出的控制下的误差比PID控制下的更小、更平滑。这些好处是由MCM帮助增加回路增益所带来的。图18提供了均方根(RMS)误差及其变化的比较。在PID控制下,RMS误差的跳跃反映了振动的增加,当工作台移动到滚珠丝杠端时,振动最终导致了系统的不稳定。当PID参数太高时会发生这种情况。这又一次说明所提出的控制方式比PID控制具有更小的RMS误差和更小的变化。这些结果和比较验证了以上提出的控制策略具有有效性和鲁棒性。
《图16》
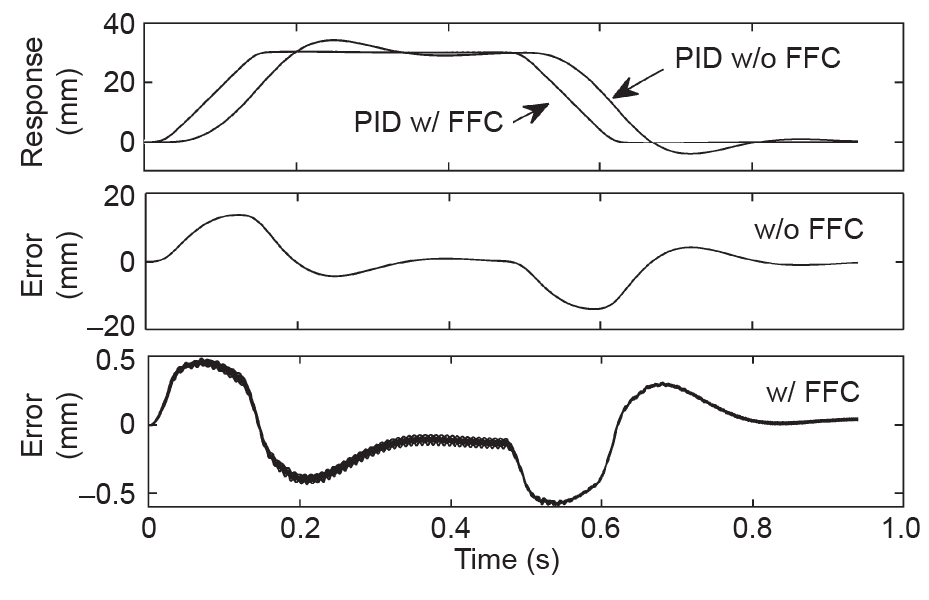
图16. PID控制的跟踪响应和误差(Ytable = 115 mm),其中,w / FFC指前馈控制,而w / o FFC指无前馈控制。
《图17》
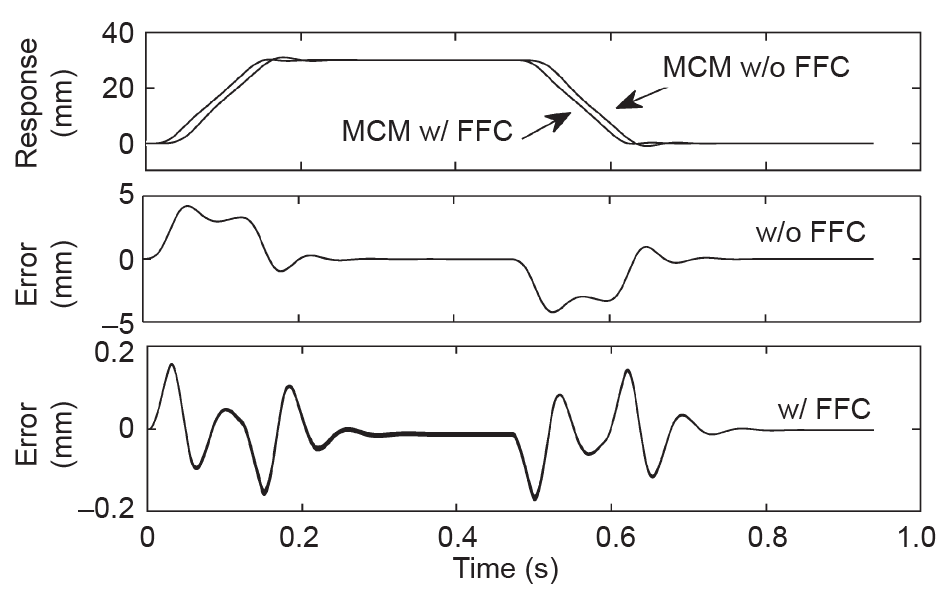
图17. MCM控制的跟踪响应和误差(Ytable = 115 mm)。
《图18》
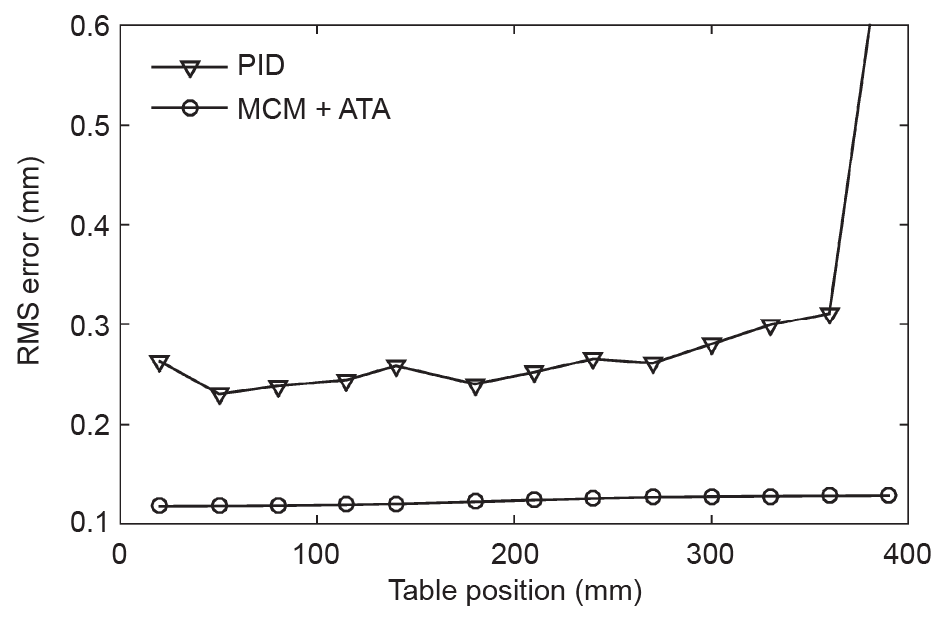
图18. RMS误差比较。
《6. 结论》
6. 结论
本文对滚珠丝杠进给驱动控制的非同位性进行了系统的研究,提出了一个由MCM和智能ATA组成的相应控制策略。修正器结合使用了峰值滤波器和陷波滤波器,从而将设备动态变为虚拟同位系统,且避免了控制溢出。ATA使用ANN作为平滑的参数插值器,实时更新滤波器的参数,以应对进给驱动系统的动态变化,且对所提出的策略的有效性和鲁棒性进行了数值验证。
《致谢》
致谢
本 工 作 得 到 了 国 家 自 然 科 学 基 金 重 点 项 目(51235009)的支持。
《Compliance with ethics guidelines》
Compliance with ethics guidelines
Hui Liu, Jun Zhang, and Wanhua Zhao declare that they have no conflict of interest or financial conflicts to disclose.











 京公网安备 11010502051620号
京公网安备 11010502051620号




