
2019, Volume 5, Issue 4
Engineering >> 2019, Volume 5, Issue 4 doi: 10.1016/j.eng.2019.01.016
Online Monitoring of Welding Status Based on a DBN Model During Laser Welding
a Guangdong Provincial Welding Engineering Technology Research Center, Guangdong University of Technology, Guangzhou 510006, China
b Joining and Welding Research Institute, Osaka University, Osaka 567-0047, Japan
Next Previous
Abstract
In this research, an auxiliary illumination visual sensor system, an ultraviolet/visible (UVV) band visual sensor system (with a wavelength less than 780 nm), a spectrometer, and a photodiode are employed to capture insights into the high-power disc laser welding process. The features of the visible optical light signal and the reflected laser light signal are extracted by decomposing the original signal captured by the photodiode via the wavelet packet decomposition (WPD) method. The captured signals of the spectrometer mainly have a wavelength of 400–900 nm, and are divided into 25 sub-bands to extract the spectrum features by statistical methods. The features of the plume and spatters are acquired by images captured by the UVV visual sensor system, and the features of the keyhole are extracted from images captured by the auxiliary illumination visual sensor system. Based on these real-time quantized features of the welding process, a deep belief network (DBN) is established to monitor the welding status. A genetic algorithm is applied to optimize the parameters of the proposed DBN model. The established DBN model shows higher accuracy and robustness in monitoring welding status in comparison with a traditional back-propagation neural network (BPNN) model. The effectiveness and generalization ability of the proposed DBN are validated by three additional experiments with different welding parameters.
Figures

Fig. 1

Fig. 2
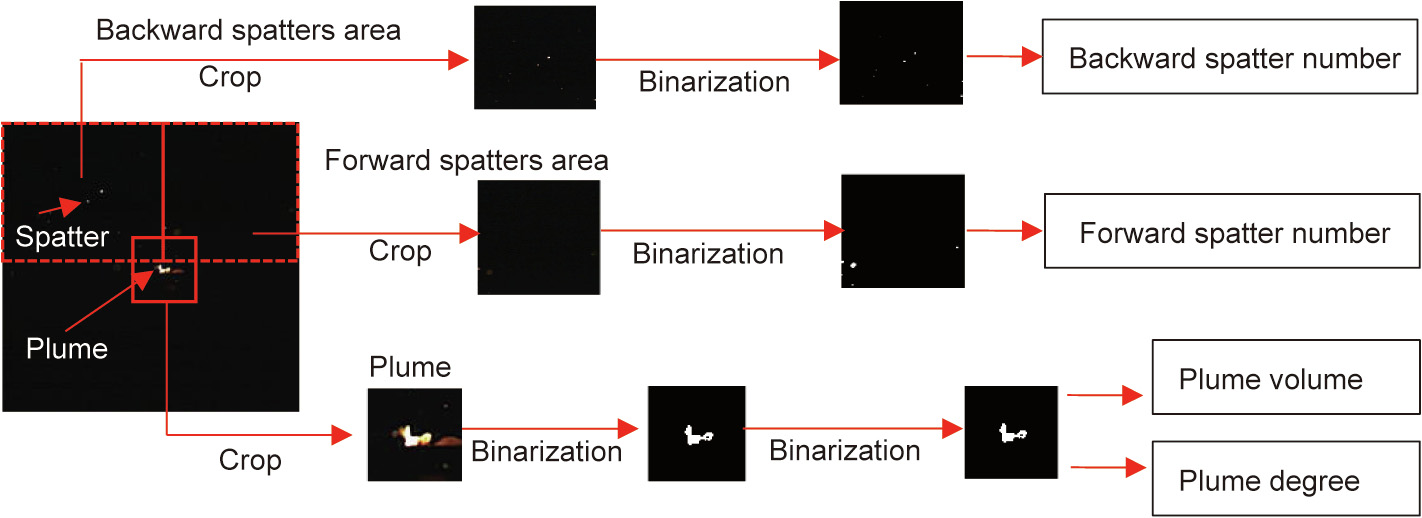
Fig. 3

Fig. 4
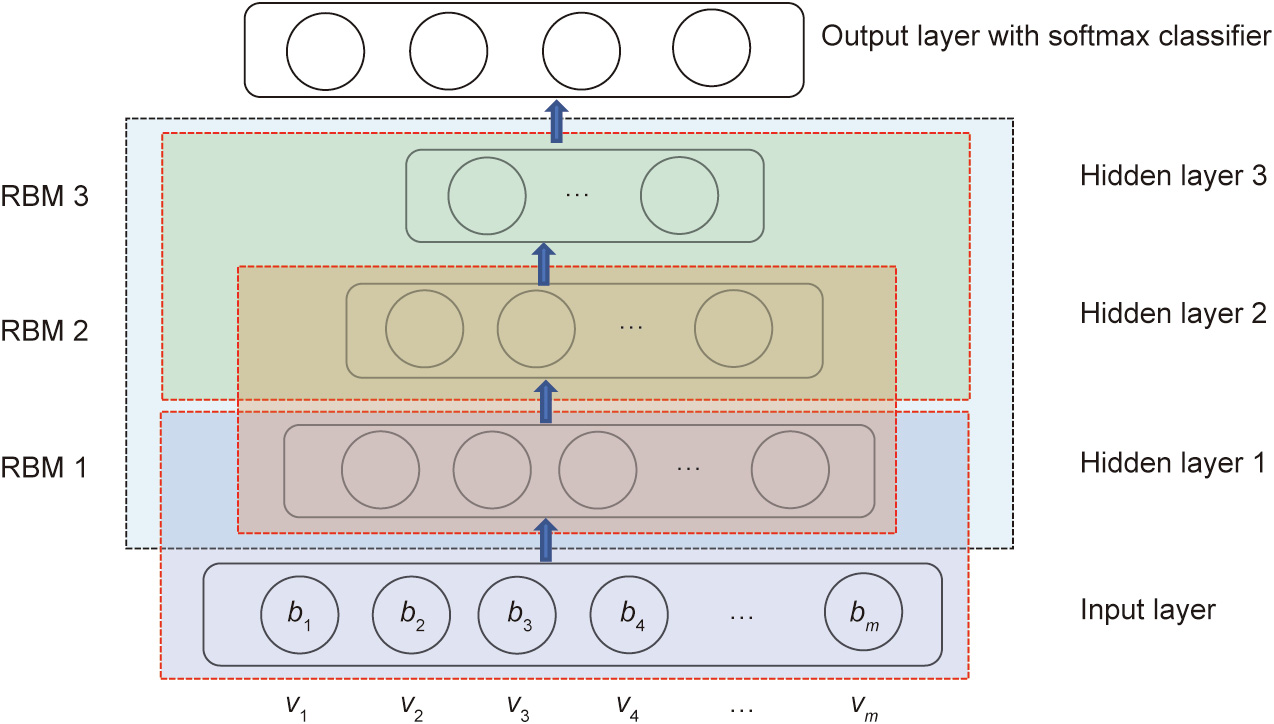
Fig. 5

Fig. 6

Fig. 7
References
[ 1 ] Wei PS, Chuang KC, Ku JS, DebRoy T. Mechanisms of spiking and humping in keyhole welding. IEEE Trans Compon Packag Manuf Technol 2012;2 (3):383–94. link1
[ 2 ] Atabaki MM, Yazdian N, Ma J, Kovacevic R. High power laser welding of thick steel plates in a horizontal butt joint configuration. Opt Laser Technol 2016;83:1–12. link1
[ 3 ] Zhang Y, Li FZ, Liang ZC, Ying YY, Lin QD, Wei HY. Correlation analysis of penetration based on keyhole and plasma plume in laser welding. J Mater Process Technol 2018;256:1–12. link1
[ 4 ] Pang SY, Chen X, Zhou JX, Shao XY, Wang CM. 3D transient multiphase model for keyhole, vapor plume, and weld pool dynamics in laser welding including the ambient pressure effect. Opt Lasers Eng 2015;74:47–58. link1
[ 5 ] Cho JH, Na SJ. Theoretical analysis of keyhole dynamics in polarized laser drilling. J Phys D Appl Phys 2007;40(24):7638–47. link1
[ 6 ] Zhang YX, Gao XD. Analysis of characteristics of molten pool using cast shadow during high-power disk laser welding. Int J Adv Manuf Technol 2014;70(9– 12):1979–88. link1
[ 7 ] Pang S, Chen X, Shao X, Gong S, Xiao J. Dynamics of vapor plume in transient keyhole during laser welding of stainless steel: local evaporation, plume swing and gas entrapment into porosity. Opt Lasers Eng 2016;82:28–40. link1
[ 8 ] Pang S, Chen X, Li W, Shao X, Gong S. Efficient multiple time scale method for modeling compressible vapor plume dynamics inside transient keyhole during fiber laser welding. Opt Laser Technol 2016;77:203–14. link1
[ 9 ] Zhang YX, Han SW, Cheon J, Na SJ, Gao XD. Effect of joint gap on bead formation in laser butt welding of stainless steel. J Mater Process Technol 2017;249:274–84. link1
[10] Li SC, Chen GY, Katayama S, Zhang Y. Relationship between spatter formation and dynamic molten pool during high-power deep-penetration laser welding. Appl Surf Sci 2014;303:481–8. link1
[11] Bonaccorso F, Cantelli L, Muscato G. An arc welding robot control for a shaped metal deposition plant: modular software interface and sensors. IEEE Trans Ind Electron 2011;58(8):3126–32. link1
[12] Fang ZJ, Xu D, Tan M. A vision-based self-tuning fuzzy controller for fillet weld seam tracking. IEEE/ASME Trans Mechatron 2011;16(3):540–50. link1
[13] Gao XD, You DY, Katayama S. Seam tracking monitoring based on adaptive Kalman filter embedded Elman neural network during high-power fiber laser welding. IEEE Trans Ind Electron 2012;59(11):4315–25. link1
[14] Tsukamoto S. High speed imaging technique part 2—high speed imaging of power beam welding phenomena. Sci Technol Weld Join 2011;16(1):44–55. link1
[15] Kong FR, Ma JJ, Carlson B, Kovacevic R. Real-time monitoring of laser welding of galvanized high strength steel in lap joint configuration. Opt Laser Technol 2012;44(7):2186–96. link1
[16] Lee SK, Kim HW, Na EW. Improvement of impact noise in a passenger car utilizing sound metric based on wavelet transform. J Sound Vibrat 2010;329 (17):3606–19. link1
[17] Kim HW, Lee SK, Na EW. Sound quality evaluation of the impact noise induced by road courses having an impact bar and speed bumps in a passenger car. Proc Inst Mech Eng Part D 2010;224(6):735–47. link1
[18] Liu H, Zhang J, Guo P, Bi F, Yu H, Ni G. Sound quality prediction for engineradiated noise. Mech Syst Signal Process 2015;56–57:277–87. link1
[19] Wang YS, Shen GQ, Xing YF. A sound quality model for objective synthesis evaluation of vehicle interior noise based on artificial neural network. Mech Syst Signal Process 2014;45(1):255–66. link1
[20] Zhang YX, Gao XD, Katayama S. Weld appearance prediction with BP neural network improved by genetic algorithm during disk laser welding. J Manuf Syst 2015;34:53–9. link1
[21] Yin S, Ding SX, Haghani A, Hao HY, Zhang P. A comparison study of basic datadriven fault diagnosis and process monitoring methods on the benchmark Tennessee Eastman process. J Process Contr 2012;22(9):1567–81. link1
[22] Yin S, Luo H, Ding SX. Real-time implementation of fault-tolerant control systems with performance optimization. IEEE Trans Ind Electron 2014;61 (5):2402–11. link1
[23] Hu YJ, Ling ZH. DBN-based spectral feature representation for statistical parametric speech synthesis. IEEE Signal Process Lett 2016;23(3):321–5. link1
[24] Huang HB, Li RX, Yang ML, Lim TC, Ding WP. Evaluation of vehicle interior sound quality using a continuous restricted Boltzmann machine-based DBN. Mech Syst Signal Process 2017;84(Pt A):245–67. link1
[25] Zou CR, Zhang XR, Zha C, Zhao L. A novel DBN feature fusion model for crosscorpus speech emotion recognition. J Electr Comput Eng 2016;2016:7437860. link1
[26] Zhang CL, He YG, Yuan LF, Xiang S. Analog circuit incipient fault diagnosis method using DBN based features extraction. IEEE Access 2018;6:23053–64. link1
[27] Mohamed A, Dahl GE, Hinton G. Acoustic modeling using deep belief networks. IEEE Trans Audio Speech Lang Process 2012;20(1):14–22. link1
[28] Zhang LX, Wu J. Deep belief networks based voice activity detection. IEEE Trans Audio Speech Lang Process 2013;21(4):697–710. link1
[29] Huang GB, Lee H, Learned ME. Learning hierarchical representations for face verification with convolutional deep belief networks. In: Proceedings of the 2012 IEEE Conference on Computer Vision and Pattern Recognition (CVPR); 2012 June 16–21; Providence, RI, USA. New York: IEEE; 2012. p. 2518–25. link1
[30] ISO 13919–1-1996: Welding—Electrons and laser beam welded joints— Guidance on quality levels for imperfections—Part I: steel. International standard. Geneva: International Organization for Standardization; 1996.











 京公网安备 11010502051620号
京公网安备 11010502051620号




