
2015, Volume 1, Issue 1
Engineering >> 2015, Volume 1, Issue 1 doi: 10.15302/J-ENG-2015016
Vibration-Driven Microrobot Positioning Methodologies for Nonholonomic Constraint Compensation
Department of Mechanical Engineering, National Technical University of Athens, 15780 Zografou, Athens, Greece
a Present address: Department of Computer Science and Engineering, University of Ioannina, 45110 Ioannina, Greece
Next Previous
Abstract
This paper presents the formulation and practical implementation of positioning methodologies that compensate for the nonholonomic constraints of a mobile microrobot that is driven by two vibrating direct current (DC) micromotors. The open-loop and closed-loop approaches described here add the capability for net sidewise displacements of the microrobotic platform. A displacement is achieved by the execution of a number of repeating steps that depend on the desired displacement, the speed of the micromotors, and the elapsed time. Simulation and experimental results verified the performance of the proposed methodologies.
Keywords
microrobotics ; vibration micromotor ; actuation nonholonomic planning ; nonholonomic constraints compensation
Figures

Fig. 1

Fig. 2
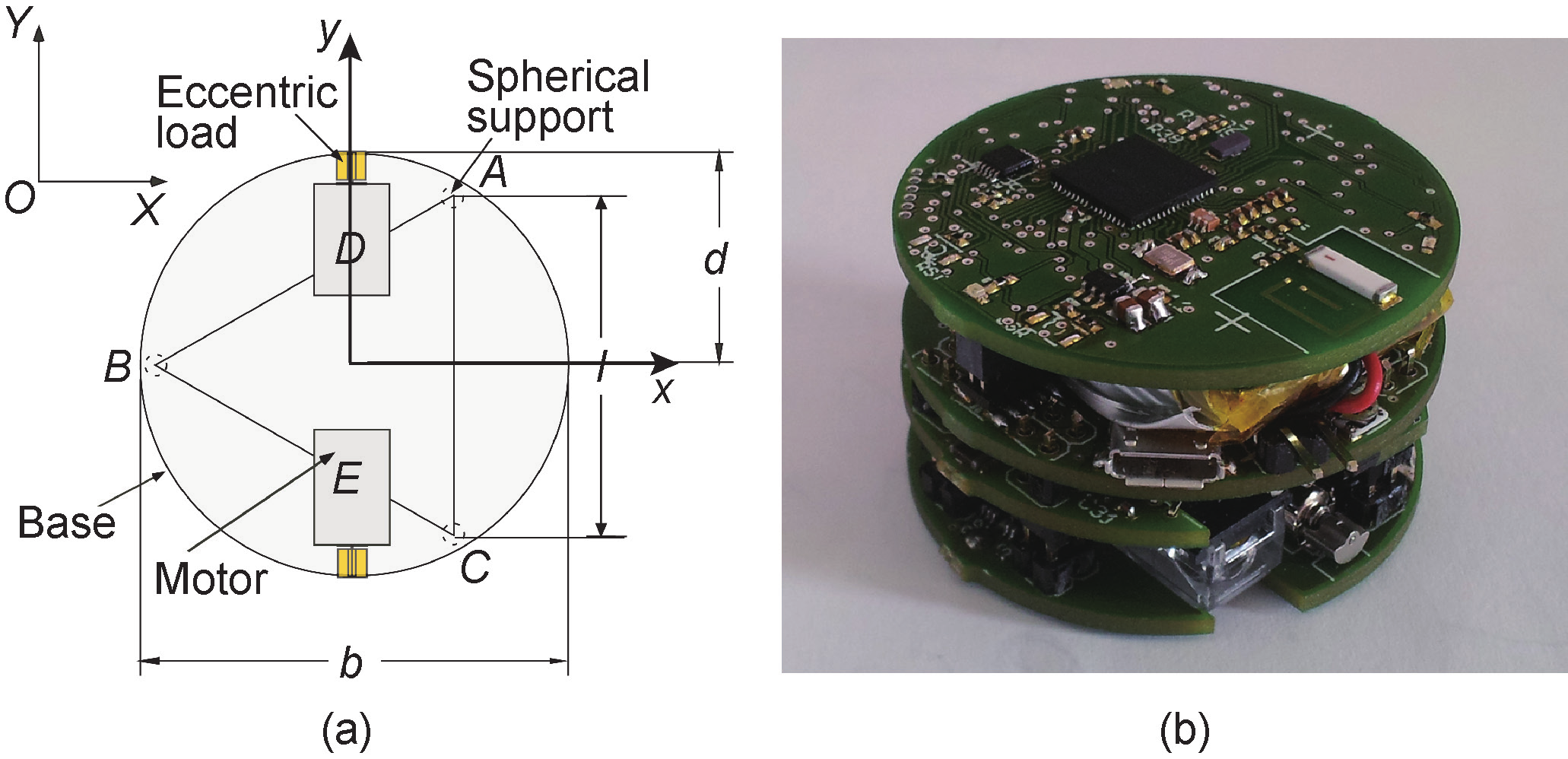
Fig. 3
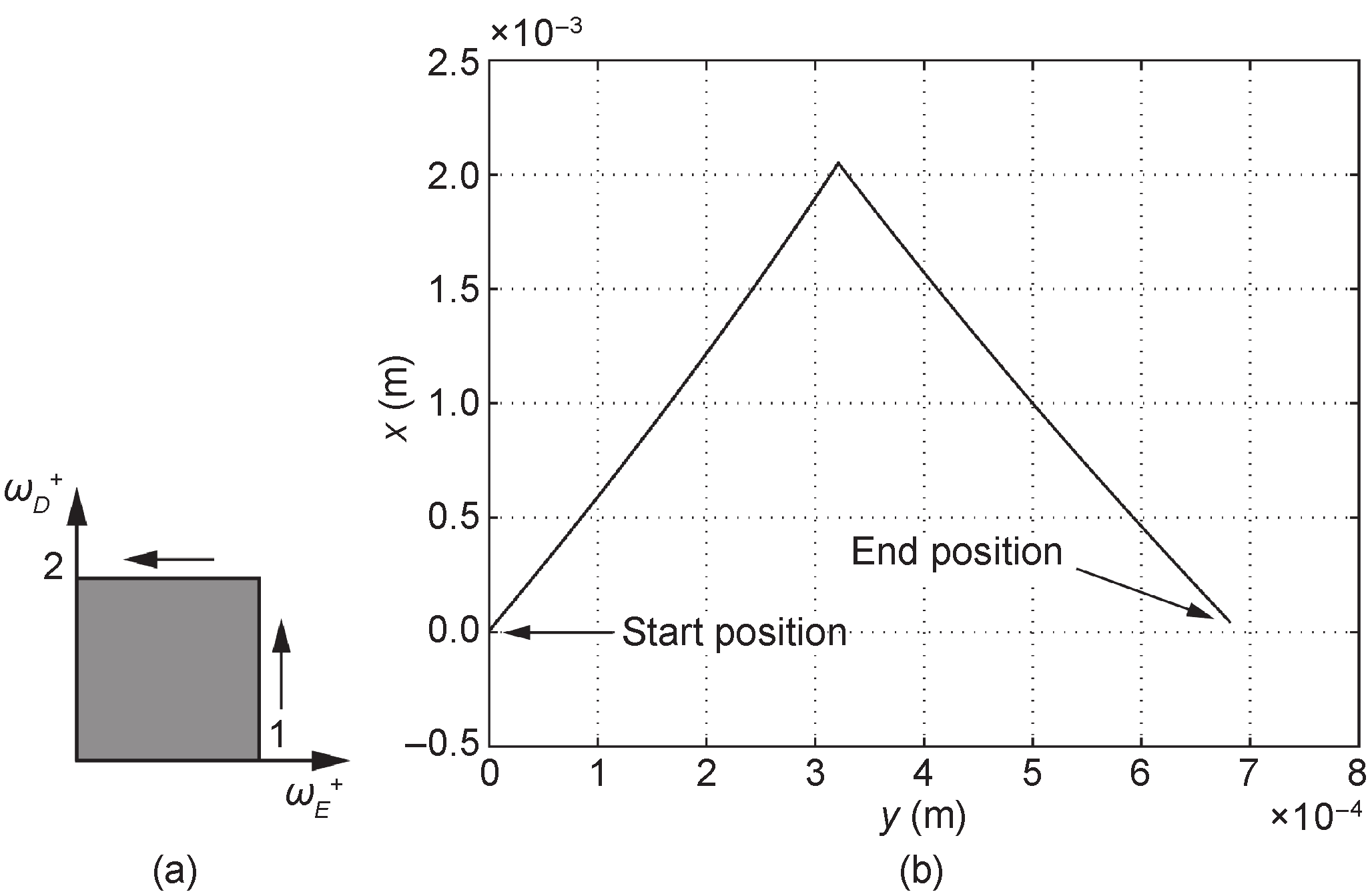
Fig. 5
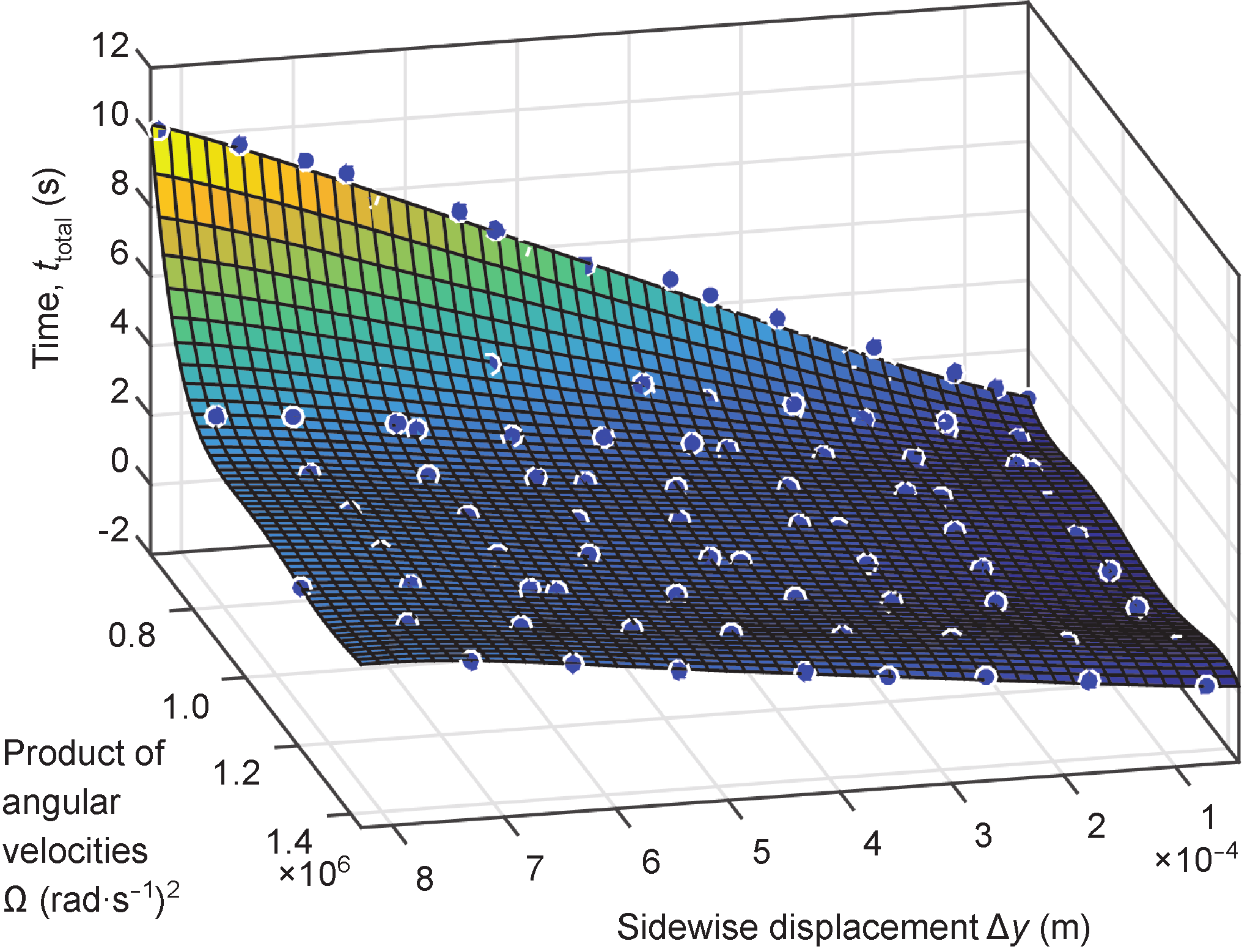
Fig. 6
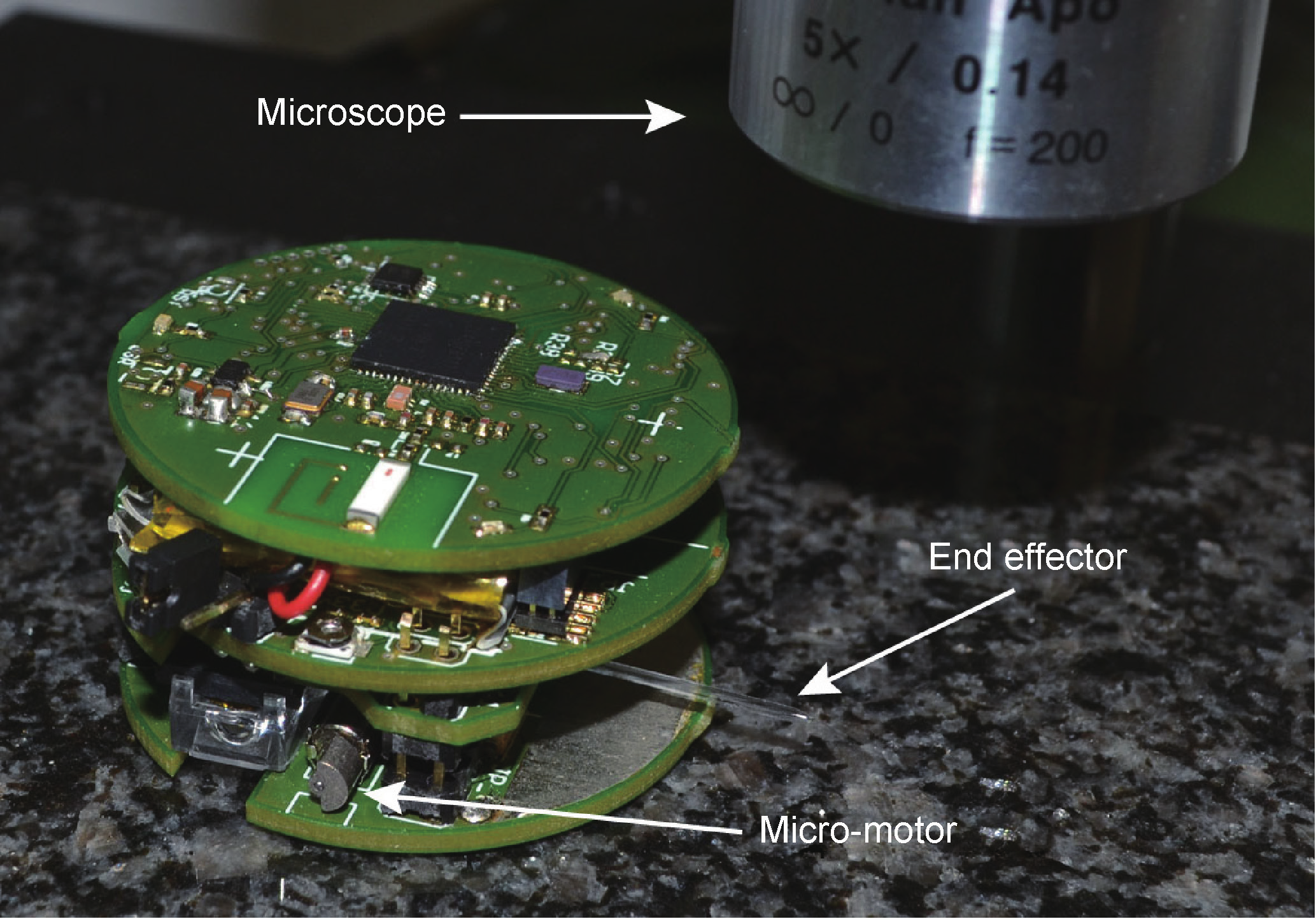
Fig. 7
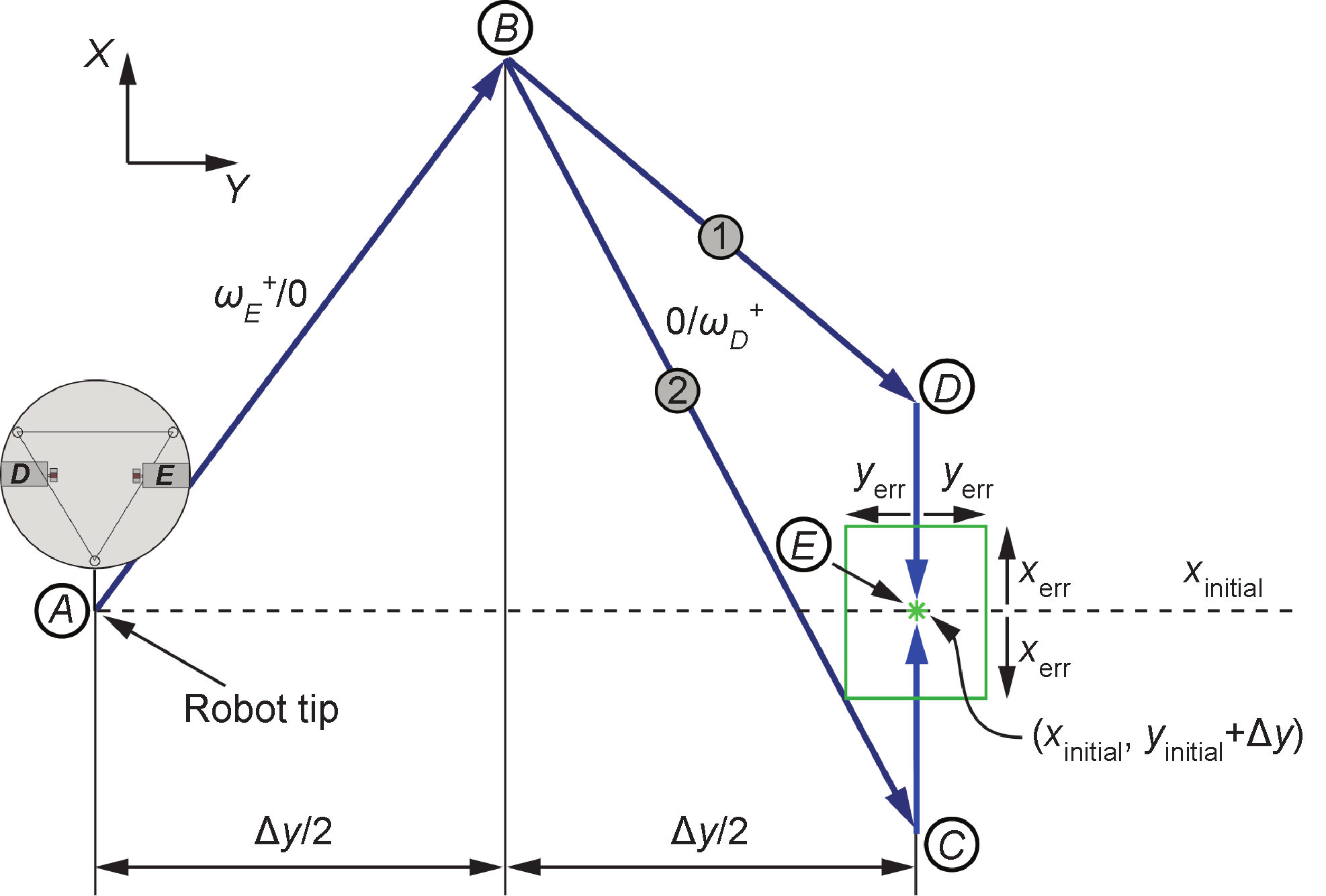
Fig. 8

Fig. 9
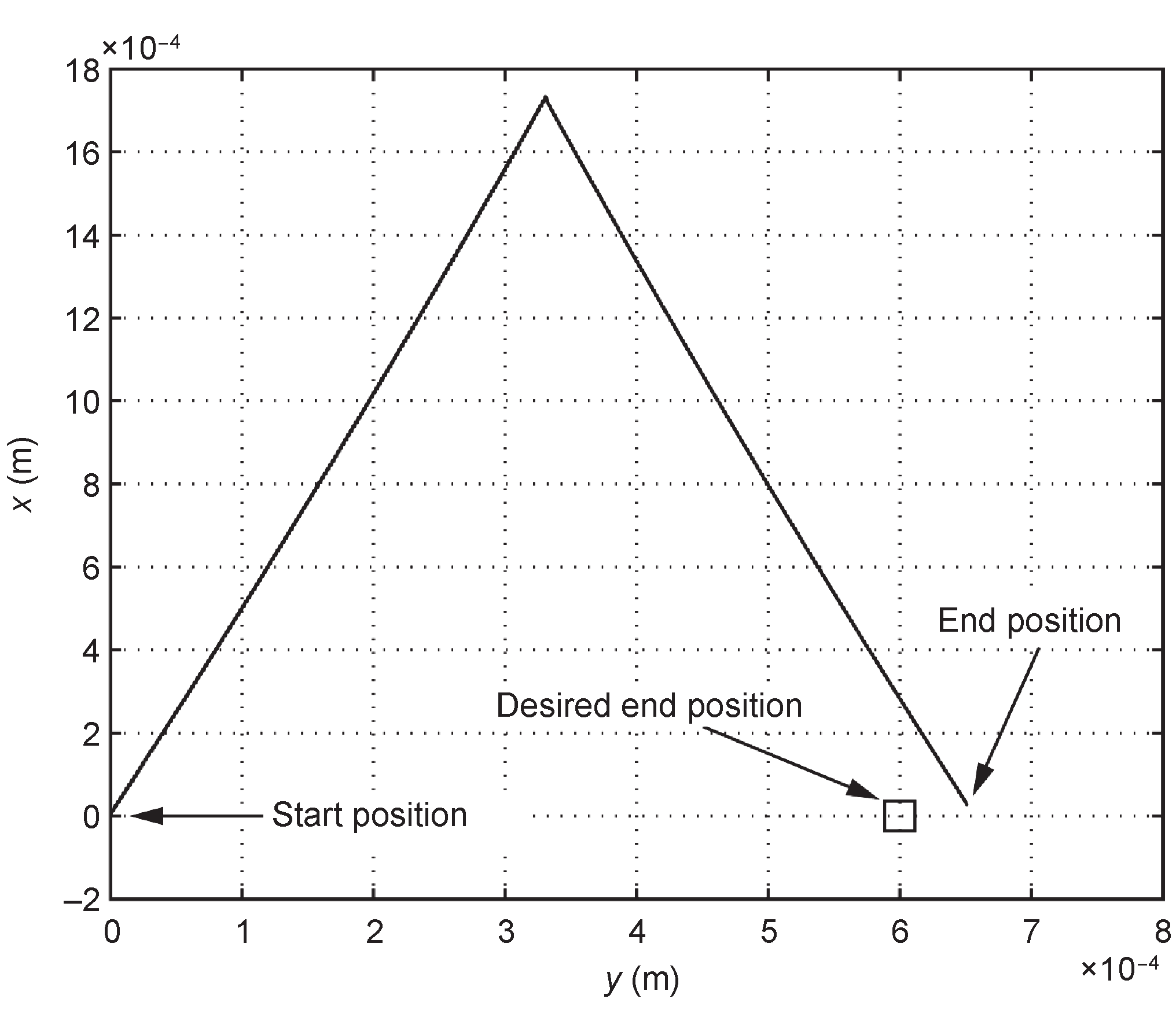
Fig. 10
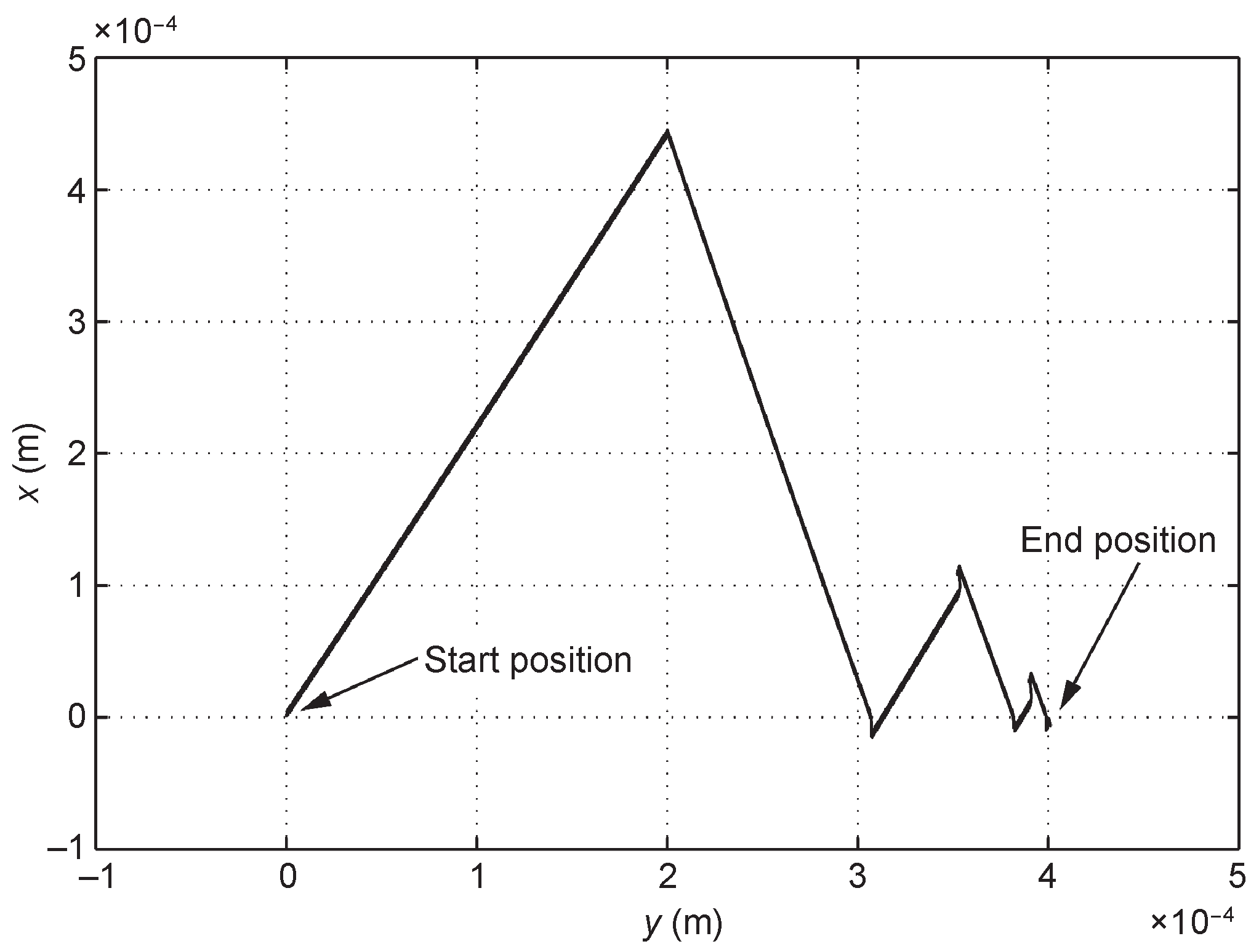
Fig. 11
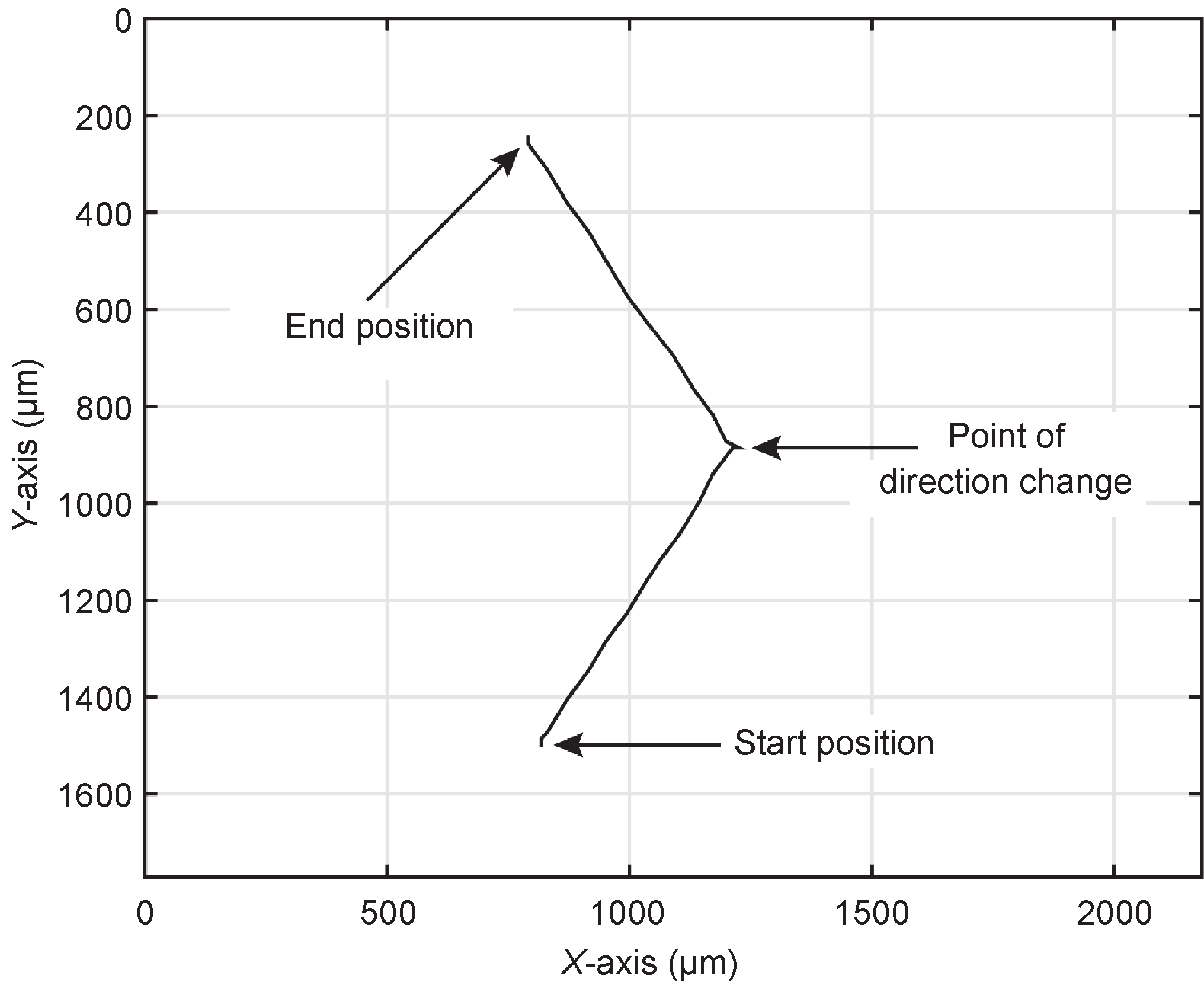
Fig. 12
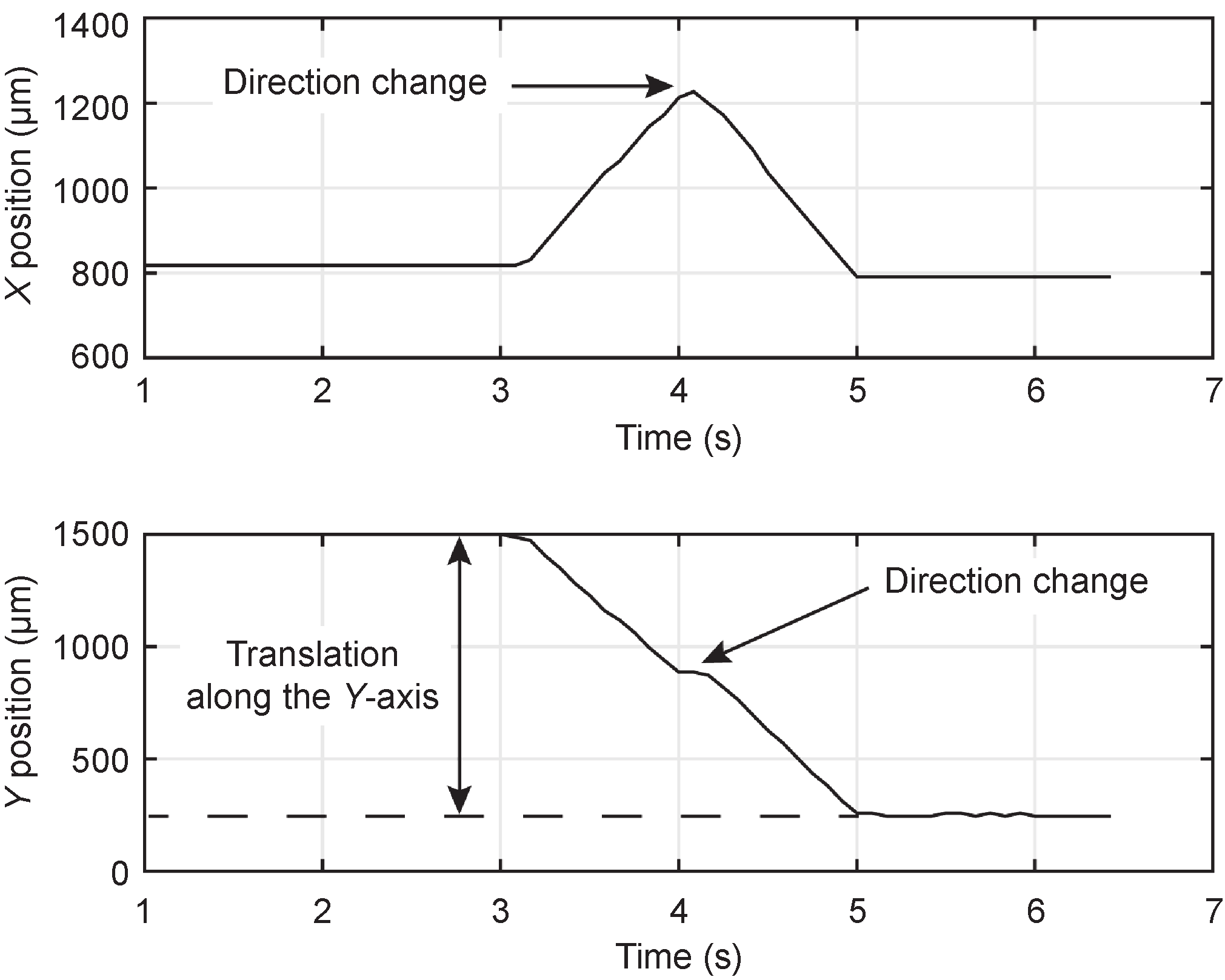
Fig. 13

Fig. 14
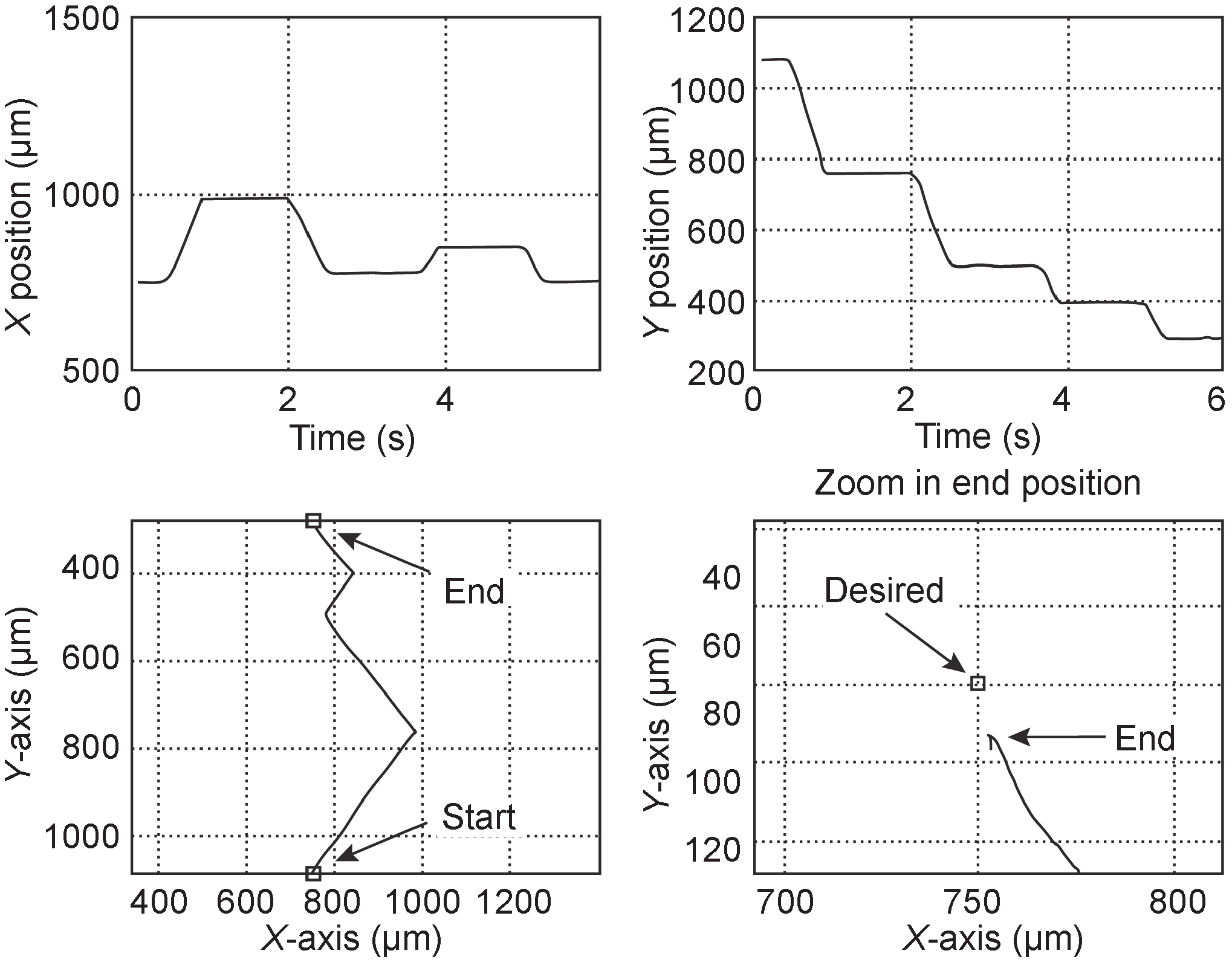
Fig. 15
References
[ 1 ] A. Kortschack, A. Shirinov, T. Trüper, S. Fatikow. Development of mobile versatile nanohandling microrobots: Design, driving principles, haptic control. Robotica, 2005, 23(4): 419–434 link1
[ 2 ] J. M. Breguet, R. Clavel. Stick and slip actuators: Design, control, performances and applications. In: Proceedings of the 1998 Int. Symposium on Micro-mechatronics and Human Science(MHS). Nagoya: IEEE, 1998: 89–95
[ 3 ] F. Schmoeckel, S. Fatikow. Smart flexible microrobots for scanning electron microscope (SEM) applications. J. Intell. Mater. Syst. Struct., 2000, 11(3): 191–198 link1
[ 4 ] B. Roland, Z. Wolfgang, C. Alain. Inertial drives for micro- and nanorobots: Analytical study. In: L. E. Parker, eds. Proceedings of SPIE Photonics East ‘95: Proc. Microrobotics and Micromachanical Systems Symposium, vol 2593. Philadelphia, 1995: 89–97
[ 5 ] S. Martel, et al. Three-legged wireless miniature robots for mass-scale operations at the sub-atomic scale. In: Proceedings of 2001 IEEE International Conference on Robotics & Automation. Seoul: IEEE, 2001: 3423–3428
[ 6 ] J. Brufau, et al. MICRON: Small autonomous robot for cell manipulation applications. In: Proceedings of the IEEE International Conference on Robotics & Automation. IEEE, 2005: 844–849
[ 7 ] M. Karpelson, G. Y. Wei, R. J. Wood. Driving high voltage piezoelectric actuators in microrobotic applications. Sens. Actuators A Phys., 2012, 4(176): 78–89
[ 8 ] P. Vartholomeos, E. Papadopoulos. Dynamics, design and simulation of a novel microrobotic platform employing vibration microactuators. Journal of Dynamic Systems, Measurement and Control, 2006, 128(1): 122–133
[ 9 ] R. W. Brockett. Control theory and singular Riemannian geometry. In: P. Hilton, G. Young, eds. New Directions in Applied Mathematics. New York: Springer-Verlag, 1981: 11–27
[10] J. P. Laumond. Feasible trajectories for mobile robots with kinematic and environment constraints. In: Proceedings of an International Conference on Intelligent Autonomous Systems, 1986: 346–354
[11] J. Barraquand, J. C. Latombe. On nonholonomic mobile robots and optimal maneuvering. In: Proceedings of the IEEE International Symposium on Intelligent Control. Albany: IEEE, 1989: 340–347
[12] J. A. Reeds, L. A. Shepp. Optimal paths for a car that goes both forwards and backwards. Pac. J. Math., 1990, 145(2): 367–393
[13] L. Gurvits, Z. Li. Smooth time-periodic feedback solutions for nonholonomic motion planning. In: Z. Li, J. F. Canny, eds. Nonholonomic Motion Planning. New York: Springer, 1993: 53–108
[14] R. M. Murray, S. S. Sastry. Nonholonomic motion planning: Steering using sinusoids. IEEE Trans. Automat. Contr., 1993, 38(5): 700–716 link1
[15] K. Vlachos, P. Vartholomeos, E. Papadopoulos. A haptic tele-manipulation environment for a vibration-driven micromechatronic device. In: IEEE/ASME International Conference on Advanced Intelligent Mechatronics Systems. Zurich: IEEE, 2007: 1–6











 京公网安备 11010502051620号
京公网安备 11010502051620号




